Изобретение предназначено для обеспечения поражения обнаруженной цели ударным робототехническим комплексом, оснащенным ракетным вооружением, в случае израсходования им управляемых ракет.
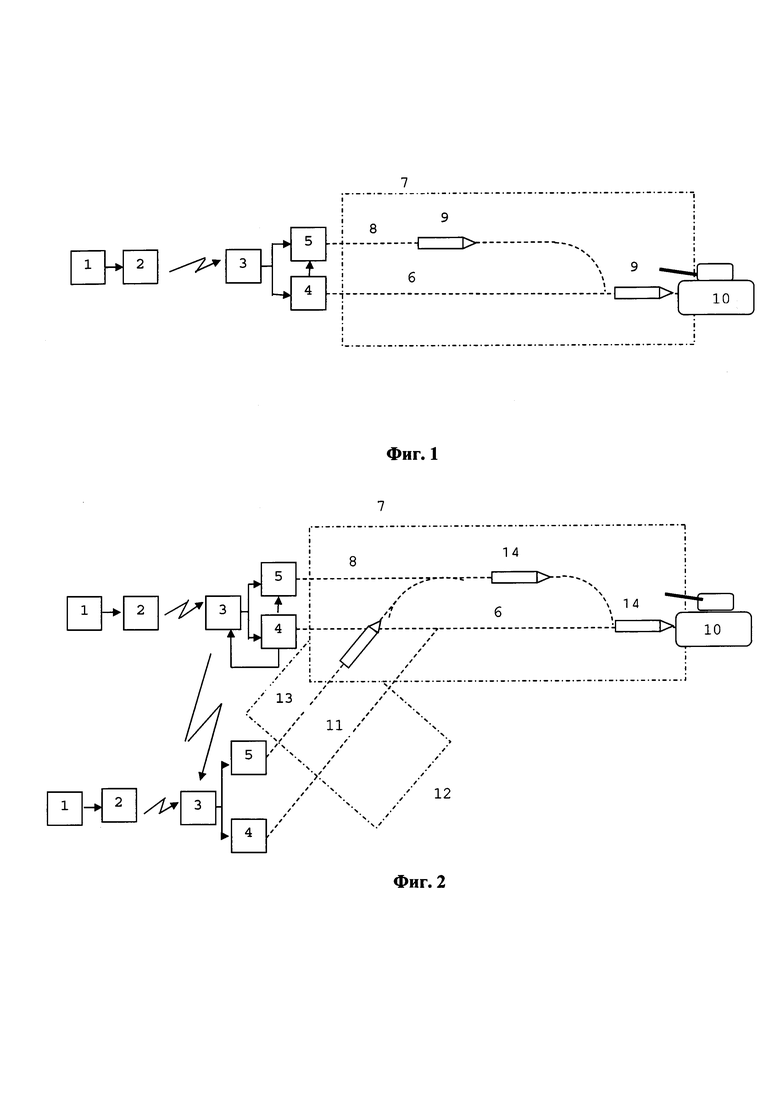
Известны способы поражения цели управляемой ракетой ударных робототехнических комплексов (РТК), созданных на базе танков и БМП Поражение цели этим РТК иллюстрируется фиг. 1, где: 1 - оператор РТК; 2 - система дистанционного управления и связи РТК; 3 - бортовая система связи РТК; 4 - прицел-дальномер РТК; 5 - комплекс управляемого вооружения РТК; 6 - линия прицеливания РТК, 7 - поле управления ракетой РТК; 8 - траектория полета ракеты РТК, 9 - ракета РТК; 10 - цель. Поражение цели ракетой РТК осуществляется следующим образом. При обнаружении цели (10) оператор (1) измеряет дальность до цели, используя систему дистанционного управления и связи (2), бортовую систему связи РТК и прицел-дальномер (4), а затем подает команду на выстрел по цели ракетой РТК. Ракета выстреливается в поле управления (7) и летит к цели выше линии прицеливания (6) по траектории (8). На расстоянии в 150 м от цели ракета автоматически опускается на линию прицеливания и поражает цель.
Недостатком существующего способа поражения цели управляемой ракетой РТК является то, что боекомплект РТК содержит ограниченное число ракет, и при их израсходовании РТК будет не в состоянии поразить обнаруженную цель. Вместе с тем, в непосредственной близости от РТК будут действовать другие РТК, содержащие в боекомплекте управляемые ракеты, но не имеющие возможности вести прицельный огонь по обнаруженной первым РТК цели.
Целью настоящего изобретения является обеспечение поражения обнаруженной цели ударным робототехническим комплексом, оснащенным ракетным вооружением, в случае израсходования им управляемых ракет. Указанная цель достигается перезахватом первым РТК управляемой ракеты, выпущенной вторым РТК, не имеющим возможности вести прицельный огонь по обнаруженной первым РТК цели.
Поражение цели предлагаемым способом иллюстрируется Фиг. 2, где 11 - линия прицеливания второго РТК, 12 - поле управления ракетой второго РТК; РТК; 13 - траектория полета ракеты второго РТК до ее входа в поле управления первого РТК, 14 - ракета второго РТК. Поражение цели ракетой предлагаемым способом осуществляется следующим образом. При обнаружении цели (10) оператор (1) производит ложную подготовку РТК к стрельбе ракетой, измеряет дальность до цели дальномером (4) и подает команду на выстрел. При этом в пространстве перед РТК формируется поле управления (7). Одновременно сигнал с дальномера (4) поступает в бортовую систему связи (3) первого РТК, которая передает координаты цели на борт второго РТК. При подаче оператором второго РТК команды на выстрел в направлении на цель образуется поле управления, в которое выстреливается ракета второго РТК. Через несколько (2-4) секунд полета ракета второго РТК входит в поле управления первого РТК. При этом поле управления второго РТК выключается.
Таким образом, после выполнения перечисленных операций обеспечивается синхронность выключения поля управления второго РТК и включения поля управления первого РТК, в целом синхронизации работы двух РТК от момента команды на выстрел второго РТК до момента перезахвата управляемой ракетой системой наведения первого РТК.
Осуществив перезахват, оператор первого РТК наводит ракету на цель и поражает ее.
Техническим решением предложенного изобретения является синхронизации работы двух РТК от момента команды на выстрел второго РТК до момента перезахвата управляемой ракеты системой наведения первого РТК.
Техническим результатом предложенного способа является возможность поражения обнаруженной цели ударным робототехническим комплексом, оснащенным ракетным вооружением, в случае израсходования им управляемых ракет.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления огнем робототехнического комплекса | 2020 |
|
RU2749973C1 |
| Система управления ударного робототехнического комплекса военного назначения | 2022 |
|
RU2791949C1 |
| БРОНИРОВАННАЯ БАШНЯ "ТАЙФУН" БОЕВОЙ МАШИНЫ | 2003 |
|
RU2254546C1 |
| ТРЕНАЖЕР ОПЕРАТОРОВ ПУШЕЧНО-РАКЕТНОГО ВООРУЖЕНИЯ | 2011 |
|
RU2465534C1 |
| Робототехнический комплекс для ведения разведки и огневой поддержки | 2017 |
|
RU2686983C2 |
| АВТОМАТИЗИРОВАННАЯ ФОРТИФИКАЦИОННАЯ РАКЕТНАЯ УСТАНОВКА | 2014 |
|
RU2591561C2 |
| Боевой модуль с магнитожидкостным компенсатором отдачи | 2023 |
|
RU2825790C1 |
| ТАНК | 2001 |
|
RU2218543C2 |
| БПЛА-перехватчик (варианты) | 2024 |
|
RU2825677C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2012 |
|
RU2481541C1 |
Способ поражения цели робототехническим комплексом (РТК), при котором израсходовавший ракеты РТК перезахватывает управляемые ракеты, выпущенные другим РТК, не имеющим возможности вести прицельный огонь по обнаруженной первым РТК цели. Технический результат – повышение боевых возможностей ударных робототехнических комплексов. 2 ил.
Способ поражения обнаруженной цели ударным робототехническим комплексом (РТК), оснащенным ракетным вооружением, отличающийся тем, что в случае израсходования им управляемых ракет осуществляют перезахват полем управления РТК ракеты, выпущенной другим РТК, не имеющим возможности вести прицельный огонь по обнаруженной первым РТК цели.
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| US 9933780 B2, 03.04.2018 | |||
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ И РАКЕТНЫЙ КОМПЛЕКС | 1997 |
|
RU2112203C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2013 |
|
RU2534206C1 |

