Изобретение относится к области военной техники, а именно к автоматизированному вооружению, которое устанавливается на наземные роботехнические комплексы военного назначения, и может быть использовано для обнаружения и огневого поражения различных целей при боевых действия.
В настоящее врем известно огромное количество боевых модулей, как отечественного, так и зарубежного производства, например:
Боевой модуль военной техники («Руководство по материальной части и эксплуатации танка ПТ-76», Воениздат МО СССР, Москва, 1963 г., Стр. 3-17), включающий бронированную башню с артиллерийским орудием, боеукладку, систему заряжания и прицельно-наблюдательный комплекс.
Боевая машина пехоты БМП-1 («Боевая машина пехоты БМП-1. Техническое описание. Воениздат МО СССР, Москва, 1972 г., стр. 14), которая имеет боевое отделение, включающее броневой колпак с подвесной корзиной. В броневом колпаке устанавливают: гладкоствольное орудие калибра 73 мм, спаренный пулемет, механизм заряжания орудия, прицел, аппаратура управления, привода наведения, приборы наведения.
Из патента (RU 2254546 С1, Опубл. 20.06.2005 г.) известна бронированная башня боевой машины, содержащая стабилизированную пушку, спаренную с пулеметом, средство для установки ракетного комплекса, гранатометы, стабилизированную поисково-прицельную аппаратуру с тепловизионным каналом, лазерный дальномер и т.д.
Боевой модуль АУ-220М с артиллерийской установкой для размещения на военной технике (Патент RU 55117 U1, Опубл. 27.07.2006), содержащий боевой модуль с артиллерийской установкой для размещения на подвижных боевых средствах, состоящий из бронированной башни с артиллерийским орудием, боеукладки, системы заряжания и прицельно-наблюдательного комплекса, 57-мм автоматической пушки, системы управления огнем, стабилизатора вооружения.
Дистанционно-управляемый боевой модуль (Патент RU 2715254 U1, Опубл. 26.02.2020), содержащий механический модуль и размещенные в нем: пулемет крупного калибра, система питания, состоящая из расположенного внутри механического модуля съемного магазина с лентой, снаряженной патронами, и тракта питания пулемета.
Общим недостатком представленных выше технических решений является их значительные масса-габаритные показатели. Данное обстоятельство делает установку данных боевых модулей на легкие наземные робототехнические комплексы практически невозможным.
Известен самоходный противотанковый ракетный комплекс (ПТРК) «Caracal» (Сборник научно-технической информации №3 (37), Тула, 2011 г.), предназначенный для поражения различной бронетехники на дальностях до 5500 м. ПТРК содержит: дистанционно-управляемый боевой модуль, включающий пусковое устройство (ПУ) с направляющими, на которых расположены противотанковые управляемые ракеты, щиток, прицел-прибор наведения, механизмы вертикального и горизонтального наведения с электроприводами и поворотными частями, автомат сопровождения цели, механизм перевода ПУ в боевое и походное положения, пульт дистанционного управления, носитель с крышей и выполненным в ней проемом, элементы крепления боевого модуля к опорному устройству. В походном положении ПУ находится внутри корпуса носителя, а при переводе в боевое положение поднимается через проем над его крышей. Подъем и опускание ПУ из походного положения в боевое и обратно осуществляется с помощью механизма перевода ПУ, представляющего собой шарнирный ромб, приводимый в движение гидравлическим приводом с гидроцилиндром, питание которого обеспечивается гидростанцией. Механизм горизонтального наведения закреплен на полу носителя и выполнен в виде погона, диаметр которого соизмерим с шириной носителя. Шарнирный ромб по габаритам также соизмерим с шириной носителя и закреплен нижней частью на поворотной части механизма горизонтального наведения. Механизм вертикального наведения закреплен на верхней части шарнирного ромба, а ПУ расположена на его поворотной части.
Недостатками указанного технического решения являются:
Большие габариты и масса, обусловленные тем, что механизмы горизонтального наведения и перевода ПУ в боевое и походное положения по своим габаритам соизмеримы с шириной носителя, а при наведении по горизонту занимают практически весь его внутренний объем.
Значительные трудности при размещении боевого модуля на носителях малой грузоподъемности, так как его основные составные части не соединены в единый модуль, а закрепляются в различных местах внутреннего объема носителя и соединены электрическими и гидравлическими связями, например, гидравлическая станция и механизм горизонтального наведения установлены на полу носителя в специально выполненных местах.
Наиболее близким техническим решением к заявленному изобретению является универсальный боевой модуль (Патент RU 2559372 С1, Опубл. 10.08.2015), содержащий шасси с элементами крепления, пусковое устройство (ПУ) с направляющими для управляемых ракет, включающее механизмы вертикального и горизонтального наведения с электроприводами и поворотными частями, установленные на поворотной части механизма вертикального наведения направляющие для ракет, прицел-прибор наведения и автомат сопровождения цели, механизм перевода ПУ в боевое и походное положения, блоки управления электроприводами наведения и механизмом перевода ПУ, пульт дистанционного управления, элементы крепления боевого модуля к опорному устройству, отличающийся тем, что он снабжен жесткой пространственной фермой Г-образной формы, горизонтальная часть которой выполнена в виде фланца с проемом, элементами крепления и фиксирующими площадками, а вертикальная – в виде рамы с закрепленными на ней блоками управления механизмами наведения и механизмом перевода ПУ, включающим шарнирно закрепленную на горизонтальной оси поворотную платформу и соосный с ней зубчатый сектор, причем поворотная платформа снабжена электрическим приводом с выходной шестерней, взаимодействующей с зубчатым сектором и сенсором угла ее поворота, механизм горизонтального наведения закреплен на поворотной платформе, механизм вертикального наведения - на его поворотной части, снабженной кронштейном с выступами, взаимодействующими в походном положении с фиксирующими площадками.
Недостатком прототипа является ограниченная номенклатура используемого вооружения устанавливаемое на боевом модуле, что делает его малоэффективным при ведении боя с различными огневыми средствами противника. Так, основным вооружением прототипа являются управляемые ракеты, эффективные при борьбе как с мобильными, так и стационарными объектами противника, в том числе и бронированными (танки, БМП, вертолеты и пр.). При этом по неподвижным объектам и огневым точкам (ДОТ, ДЗОТ, здание и пр.) используемым противником как средство защиты целесообразно применять неуправляемые ракеты или выстрелы гранатометов типа РПГ-7, РПГ-18, РПГ-26 и т.д., так как это позволит увеличить мобильность огневого средства. После выстрела ракету (выстрел) не нужно сопровождать до цели, следовательно, можно сменить позицию или использовать другой вид вооружения по цели. Управляемая ракета малоэффективна при борьбе с пехотой противника. В таких случаях рационально применять оружие, способное за короткий промежуток времени прицельно выпустить большое количество поражающих элементов. Для этой цели больше подходит автоматическое оружие типа пулемет или автомат.
При этом следует отметить, что при использовании различных динамореактивных типов гранатометов и ракетных комплексов не требует значительных изменений в конструкции боевого модуля, так как при старте ракеты (гранатометного выстрела) отсутствует отдача. Поэтому для ведения прицельного огня из динамореактивных типов оружия необходимо просто зафиксировать пусковую установку (гранатомет) в боевом модуле.
Противоположный эффект используется в автоматическом стрелковом оружии, принцип которого основан на использовании энергии пороховых газов. Поскольку штатный темп стрельбы из автоматического оружия достаточно высок и составляет, например, для пулемета «Корд» не менее 600 выстрелов в минуту, то стрельба очередями из указанного типа оружия, установленного на боевой модуль, с неизбежностью сопровождается уводом оружия с линии прицеливания за счет отдачи и неабсолютной жесткости всех элементов, фиксирующих оружие в пространстве, включая несущие элементы модуля, а также корпус и шасси робототехнического комплекса. При этом чем выше темп стрельбы и длиннее очередь, тем значительнее проявлении данного эффекта. Указанная проблема может быть эффективно решена использованием в конструкции боевого модуля компенсатора отдачи. Таким образом, возникает проблема создания универсального боевого модуля, совмещающего в себе два вида оружия основанных на разных физических принципах.
Задачей и техническим результатом, на достижение которого направлено заявляемое изобретение, является увеличение эффективности боевого модуля за счет повышения универсальности его конструкции с целью обеспечения возможности комплектования его оружием в зависимости от выполняемых задач, а также обеспечения эффективной стрельбы из этого оружия.
Технический результат достигается тем, что в составе пускового устройства используют универсальный ложемент с подвижными элементами крепления в виде переднего и заднего подвижных фиксаторов с пальцами, болтовым соединением скрепленных с каретками, обеспечивающими линейное перемещение внутри корпуса за счет скольжения на телах качения, магнитожидкостный компенсатор отдачи, выполненный с возможностью управления от электронного блока, а также универсальные крепления с переходными вкладышами, позволяющими жестко закрепить различные по форме и размерам образцы реактивного оружия. Магнитожидкостный компенсатор отдачи содержит шток с пружиной и поршнем с электромагнитной катушкой, размещенные в герметичном корпусе, в поршне выполнены сквозные каналы, сообщающие подпоршневую и надпоршневую полости, заполненные магнитореологической жидкостью.
Предложение поясняется рисунками, где:
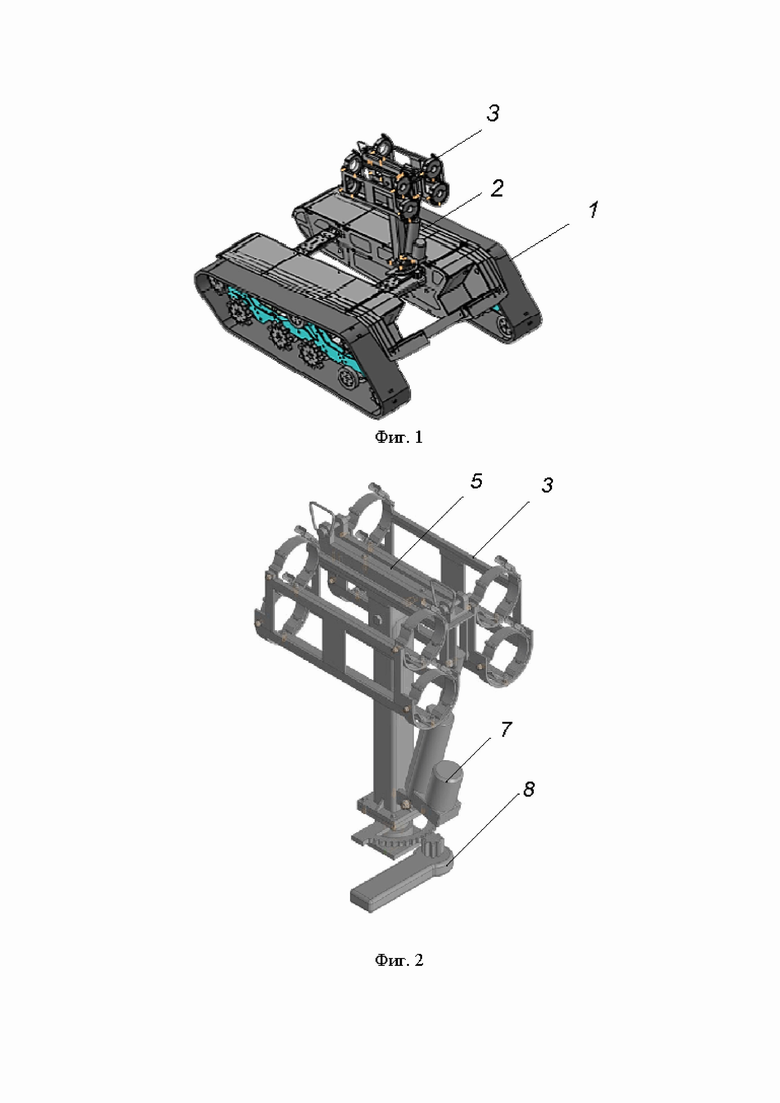
на фиг. 1 изображен общий вид робототехнического комплекса с размещенным на нем боевым модулем;
на фиг. 2 изображен общий вид боевого модуля с пусковым устройством;
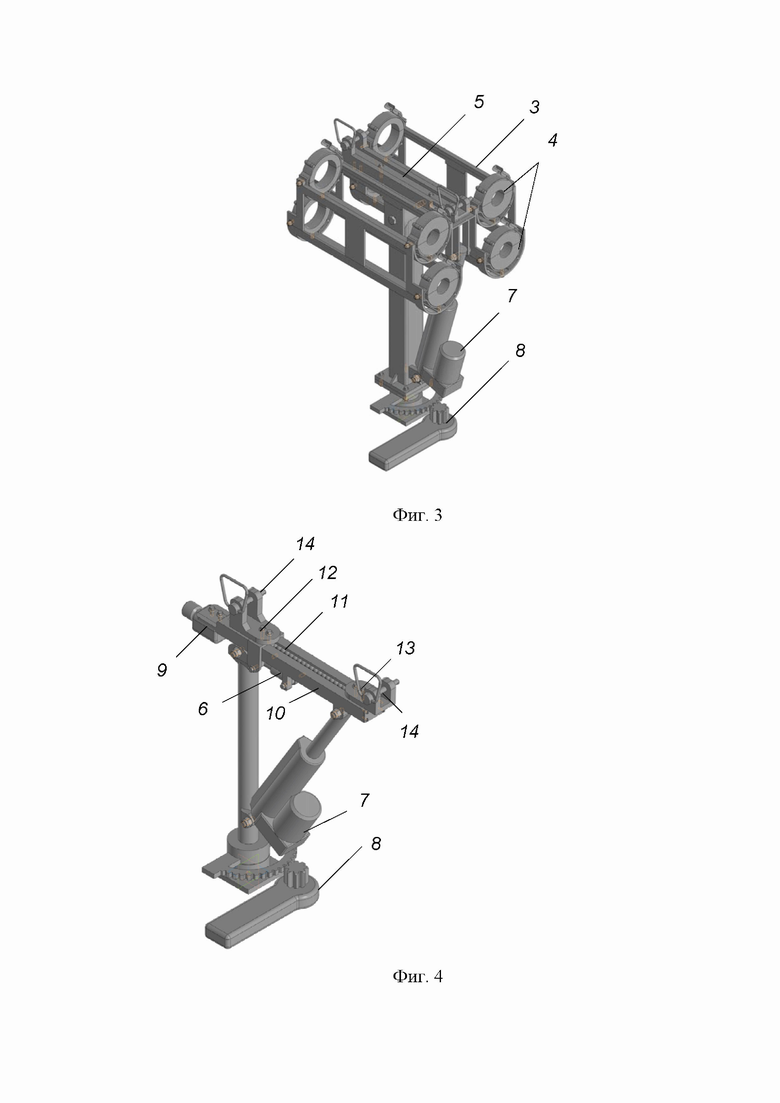
на фиг. 3 изображен общий вид боевого модуля с пусковым устройством и установленными переходными вкладышами;
на фиг. 4 представлено устройство универсального ложемента (вид сверху);
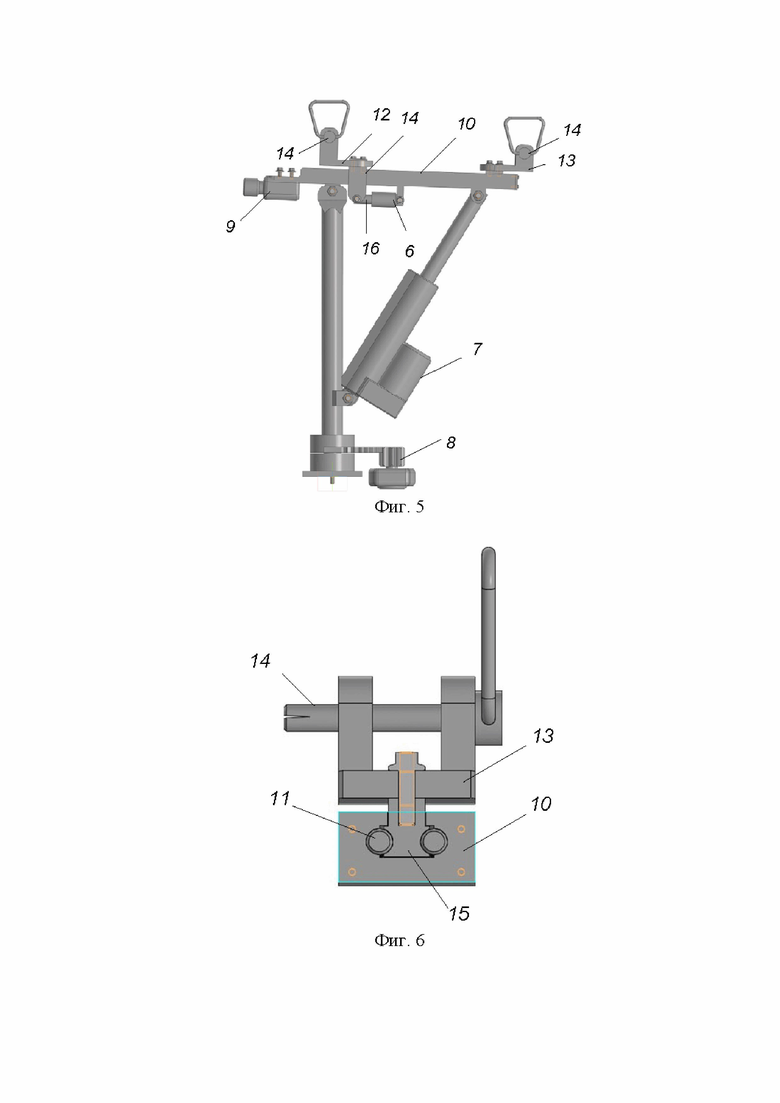
на фиг. 5 представлено устройство универсального ложемента (вид сбоку);
на фиг. 6 представлено устройство заднего фиксатора в сборе с кареткой;
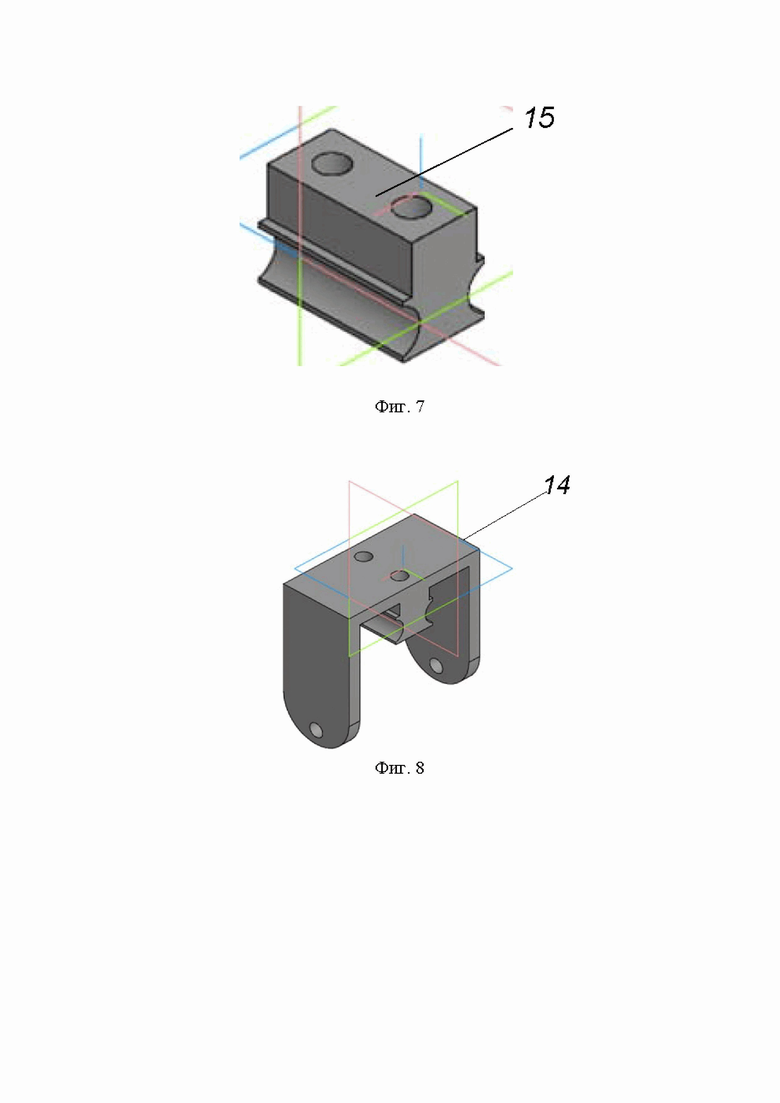
на фиг. 7 представлено устройство задней каретки;
на фиг. 8 представлено устройство передней каретки;
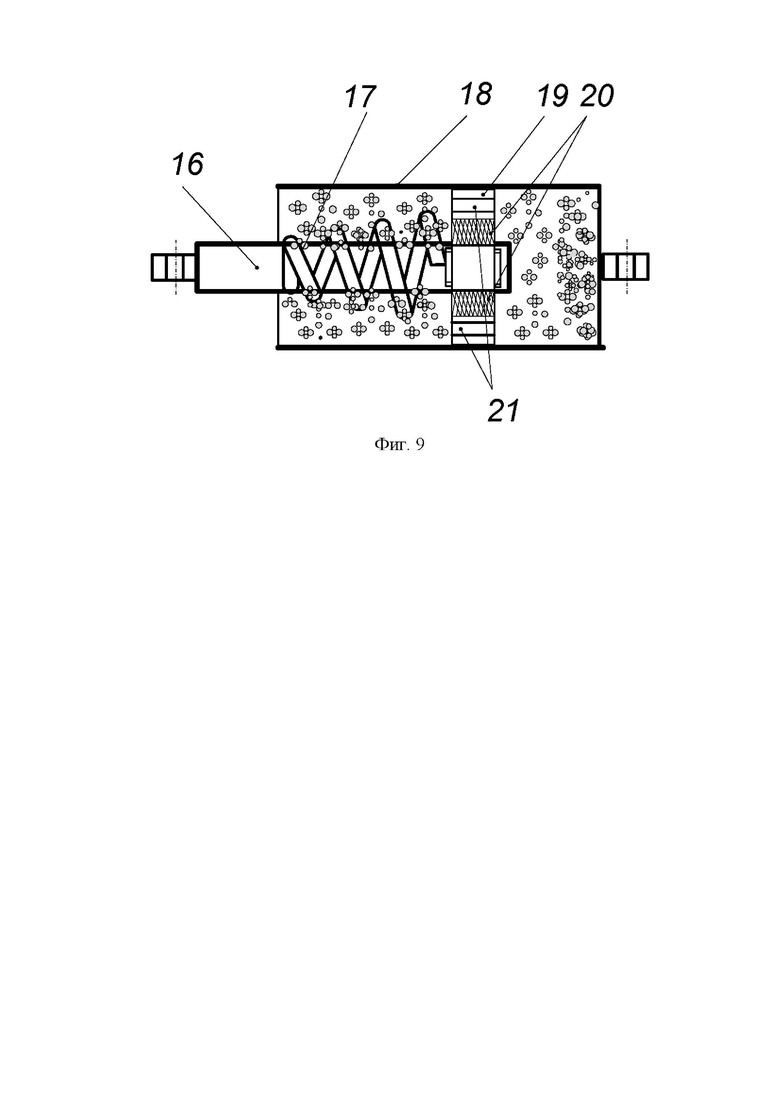
на фиг. 9 изображено устройство магнитожидкостного компенсатора отдачи.
Заявленный боевой модуль робототехнического комплекса с магнитожидкостным компенсатором отдачи содержит: шасси 1 робототехнического комплекса с элементами крепления, боевой модуль 2, на котором размещено пусковое устройство, состоящее из универсальных креплений 3 с переходными вкладышами 4 для направляющих управляемых ракет, труб гранатометов, или стволов РПГ-7, универсального ложемента 5 с магнитожидкостным компенсатором отдачи 6, механизмов вертикального 7 и горизонтального 8 наведения с электроприводами и поворотными частями, прицел-прибор наведения и автомат сопровождения цели 9, пульт дистанционного управления (на фиг. не показан).
Универсальный ложемент 5 состоит из корпуса 10, внутри которого размещают тела качения 11, переднего 12 и заднего 13 подвижных фиксаторов с пальцами 14, причем передний подвижный фиксатор 12 жестко, болтовым соединением, крепится к штоку 13 магнитожидкостного компенсатора отдачи 6 жестко закрепленного на корпусе 10. Подвижные фиксаторы 12 и 13 болтовым соединением крепятся к кареткам 14 и 15.
Магнитожидкостный компенсатор отдачи 6, содержит 16 – шток с пружиной 17, 8 – герметичный корпус компенсатора отдачи, в котором размещен поршень 19 с электромагнитной катушкой 20, связанной с блоком управления (на фиг. не показан). В поршне 19 выполнены сквозные каналы 21, сообщающие подпоршневую и надпоршневую полости, заполненные магнитореологической жидкостью.
Заявленный боевой модуль робототехнического комплекса с магнитожидкостным компенсатором отдачи функционирует следующим образом.
Боевой модуль 2 размещают на шасси 1 робототехнического комплекса. В зависимости от задач, стоящих перед оператором робототехнического комплекса, боевой модуль 2 укомплектовывается тем вооружением, которое позволит выполнить задачу с большей эффективностью. В креплениях 3 пускового устройства фиксируются требуемые виды гранатометов либо выстрелы управляемых ракет. Переходные вкладыши 4, разработанные для каждого вида оружия, позволяют жестко закрепить в креплениях 3 различные по форме и размерам образцы реактивного оружия.
На универсальном ложементе 5 с помощью переднего 12 и заднего 13 подвижных фиксаторов с пальцами 14 закрепляют автоматическое стрелковое оружие с требуемыми для выполнения задачи характеристиками. Эффективное ведение огня из автоматического стрелкового оружия, установленного в боевом модуле возможно при устранении проблемы увода ствола с линии прицеливания. Увод ствола обусловлен наличием отдачи и неабсолютной жесткости всех элементов, фиксирующих оружие в пространстве, включая несущие элементы модуля, а также корпус и шасси робототехнического комплекса. Упомянутая проблема решается за счет введения в конструкцию боевого модуля магнитожидкостного компенсатора отдачи, работа которого заключается в следующем. При производстве выстрела из автоматического оружия энергия отдачи заставляет корпус образца сместиться назад вместе с подвижными элементами крепления в виде переднего 12 и заднего 13 подвижных фиксаторов болтовым соединением скрепленных с каретками 14 и 15 обеспечивающих линейное перемещение внутри корпуса 10 за счет скольжения на телах качения (шариках) 11. Усилие, возникающее при движении корпуса оружия через передний подвижный фиксатор 12 и каретку 14 передается на шток 16 с поршнем 19 которые перемещаются в герметичном корпусе 18, болтовым соединением закрепленном на корпусе 10. На поршне 19 размещается электромагнитная катушка 20 управляющий сигнал на которую поступает с электронного блока управления (на фиг. не показан) изменяя ее магнитное поле.
При увеличении магнитного поля электромагнитной катушкой 20 увеличивается вязкость магнитореологической жидкости, которая заполняет внутреннее пространство герметичного корпуса 18 компенсатора отдачи 6. Повышенная вязкость магнитореологической жидкости препятствует ее свободному перетеканию из подпоршневой полости в надпоршневую (и/или в обратном направлении) по сквозным каналам 21 в поршне 19, обуславливая таким образом увеличение жесткости на штоке.
В свою очередь, в случае, когда управляющий сигнал с электронного блока управления (на фиг. не показан) формирует меньшее магнитное поле, вязкость магнитореологической жидкости закономерно снижается, что позволяет ей более свободно перемещаться из подпоршневой полости в надпоршневую (и/или в обратном направлении) по сквозным каналам 21 в поршне 19 при возвращении штока 16 в исходное положение после воздействия энергии отката.
Усилие, возникающее при отдаче от выстрела передающееся на шток 16 с поршнем 19 способствует перетеканию магнитореологической жидкости из подпоршневой полости в надпоршневую (и/или в обратном направлении) по сквозным каналам 21 в поршне 19 превращая при этом энергию отдачи оружия в тепловую энергию нагрева жидкости. Интенсивностью этого поглощения управляет магнитное поле катушки за счет изменения тока и изменения вязкости жидкой среды. Таким образом, поглощением энергии отдачи можно управлять в любой точке перемещения поршня, что дает возможность подстраивать систему под степень нагрева жидкости и компенсировать нежелательный эффект потери ее вязкости.
Таким образом, за счет изменения магнитного поля электромагнитной катушкой 20 имеется принципиальная возможность реализации любого закона изменения вязкости магнитореологической жидкости, следовательно, реализуется возможность практически полного демпфирования энергии отдачи выстрела, и повышения эффективности применения автоматического оружия.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С НОЖНИЧНЫМ ПОДЪЕМНИКОМ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2830637C1 |
| Боевой модуль робототехнического комплекса с универсальным ложементом | 2024 |
|
RU2838709C1 |
| ВЫСОКОТОЧНАЯ КОМПЛЕКСНАЯ ТАКТИЧЕСКАЯ РАКЕТНАЯ УСТАНОВКА БЛИЖНЕГО ДЕЙСТВИЯ | 2015 |
|
RU2642019C2 |
| ГРАНАТОМЕТНАЯ СИСТЕМА | 2010 |
|
RU2421676C1 |
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| Боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня | 2024 |
|
RU2829896C1 |
| УНИВЕРСАЛЬНЫЙ БОЕВОЙ МОДУЛЬ | 2014 |
|
RU2559372C1 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ РАКЕТ И СПОСОБ ПРИВЕДЕНИЯ ЕЕ В ПОХОДНОЕ ПОЛОЖЕНИЕ | 2005 |
|
RU2305248C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2016 |
|
RU2629688C1 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
Изобретение относится к области военной техники, а именно к автоматизированному вооружению, которое устанавливается на наземные роботехнические комплексы военного назначения, и может быть использовано для обнаружения и огневого поражения различных целей при боевых действиях. В составе пускового устройства используют универсальный ложемент с подвижными элементами крепления в виде переднего и заднего подвижных фиксаторов с пальцами, болтовым соединением скрепленных с каретками, обеспечивающими линейное перемещение внутри корпуса за счет скольжения на телах качения, магнитожидкостный компенсатор отдачи, выполненный с возможностью управления от электронного блока, а также универсальные крепления с переходными вкладышами, позволяющими жестко закрепить различные по форме и размерам образцы реактивного оружия. Техническим результатом является увеличение эффективности боевого модуля за счет повышения универсальности его конструкции с целью обеспечения возможности комплектования его оружием в зависимости от выполняемых задач, а также обеспечения эффективной стрельбы из этого оружия. 1 з.п. ф-лы, 9 ил.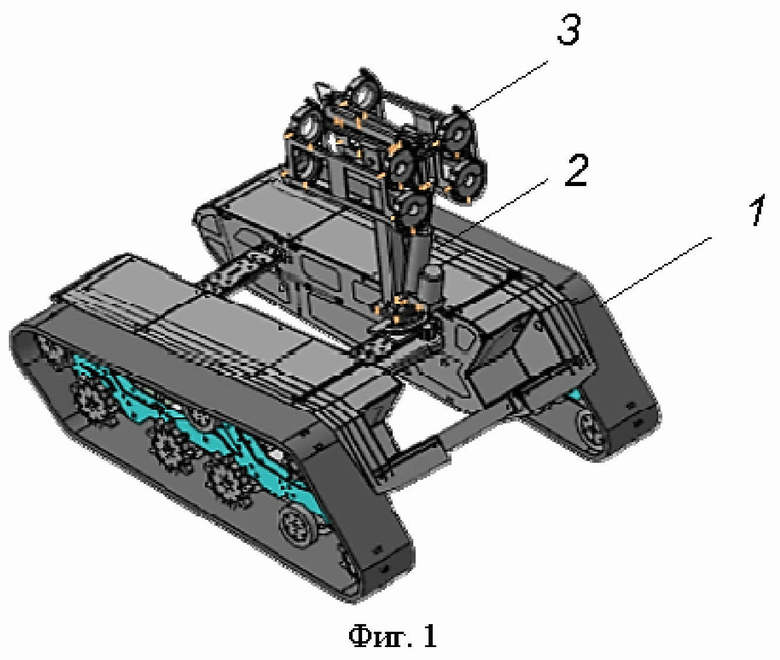
1. Боевой модуль с магнитожидкостным компенсатором отдачи, для размещения на робототехническом комплексе, состоящий из пускового устройства, включающего механизмы вертикального и горизонтального наведения с электроприводами и поворотными частями, прицел-прибор наведения и автомат сопровождения цели, блоки управления электроприводами наведения, элементы крепления боевого модуля к опорному устройству, при этом боевой модуль выполнен с возможностью дистанционного управления с пульта, отличающийся тем, что в составе пускового устройства используют универсальный ложемент с подвижными элементами крепления в виде переднего и заднего подвижных фиксаторов с пальцами, болтовым соединением скрепленных с каретками, обеспечивающими линейное перемещение внутри корпуса за счет скольжения на телах качения, магнитожидкостный компенсатор отдачи, выполненный с возможностью управления от электронного блока, а также универсальные крепления с переходными вкладышами, позволяющими жестко закрепить различные по форме и размерам образцы реактивного оружия.
2. Боевой модуль с магнитожидкостным компенсатором отдачи по п. 1, отличающийся тем, что магнитожидкостный компенсатор отдачи содержит шток с пружиной и поршнем с электромагнитной катушкой, размещенные в герметичном корпусе, в поршне выполнены сквозные каналы, сообщающие подпоршневую и надпоршневую полости, заполненные магнитореологической жидкостью.
| УНИВЕРСАЛЬНЫЙ БОЕВОЙ МОДУЛЬ | 2014 |
|
RU2559372C1 |
| Приспособление к прокатному стану для сворачивания в бунты тонких полос при выходе их из валков | 1937 |
|
SU55117A1 |
| ДИСТАНЦИОННО-УПРАВЛЯЕМЫЙ БОЕВОЙ МОДУЛЬ | 2018 |
|
RU2715254C2 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2016 |
|
RU2629688C1 |
| RU 211989 U1, 30.06.2022 | |||
| WO 2019033182 A1, 21.02.2019 | |||
| CN 113624070 A, 09.11.2021. | |||

