Изобретение предназначено для повышения эффективности подавления и уничтожения живой силы противника вооружением робототехнического комплекса военного назначения (РТК ВН) в ходе боевых действий.
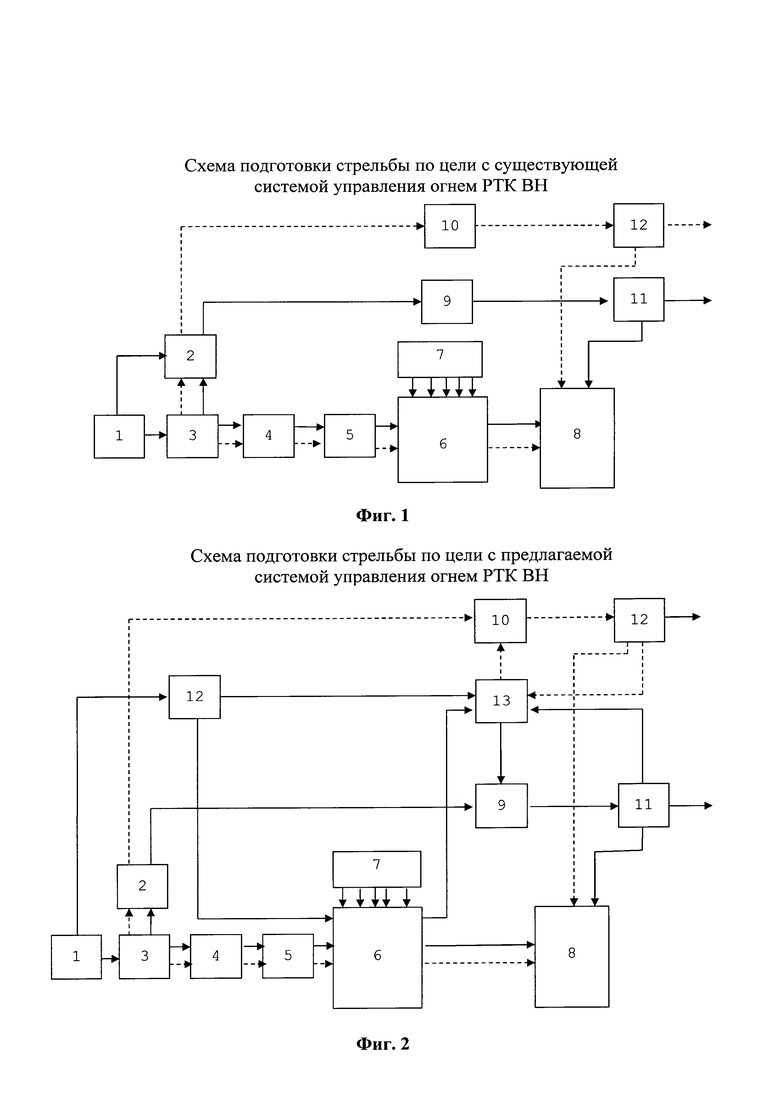
Известны системы управления огнем РТК ВН, оснащенных несколькими видами оружия для уничтожения живой силы, например, самоходного многоцелевого робота обеспечения боевых действий, содержащего модуль стрелково-гранатометного вооружения (МСГВ) с установленном в нем 12,7 мм пулеметом «Корд» и 30 мм автоматическим гранатометом АГ-30М. Подавление и уничтожение живой силы противника, обнаруженной РТК ВН или внешними разведывательными средствами, осуществляется последовательным применением вооружения МСГВ, что иллюстрируется фиг. 1, где: 1 - оператор; 2 - джойстик управления наведением вооружения; 3 - кнопка выбора типа оружия на выносном пульте дистанционного управления (ВПДУ) РТК ВН; 4 - кнопка выбора режима стрельбы; 5 - лазерный дальномер; 6 -баллистический вычислитель; 7 -датчики условий стрельбы; 8 - экран ВПДУ; 9 - привод наведения пулемета; 10 - привод наведения гранатомета; 11 - пулемет; 12 - гранатомет. Ведение стрельбы по цели с существующей системой управления огнем заключается в следующем. При обнаружении цели оператор (1) кнопкой (3) выбирает тип оружия (например, пулемет) для поражения цели, кнопкой (4) выбирает режим стрельбы, наводит джойстиком (2) лазерный дальномер (5) на цель и измеряет дальность до нее. Сигнал дальности поступает в баллистический вычислитель (6), который в соответствии с баллистикой выбранного типа оружия и с учетом сигналов датчиков условий стрельбы (7) формирует сигналы выноса точки прицеливания по горизонтали и вертикали, которые формируют на экране ВПДУ (8) положение прицельной марки. Оператор (1) с помощью джойстика (2) воздействует на привод (9) выбранного оружия -пулемета (11). При перемещении пулемета (11) перемещается и прицельная марка на экране (8) ВДПУ. При наложении прицельной марки на цель оператор производит стрельбу по ней из пулемета (11). При необходимости стрельбы из гранатомета, оператор кнопкой (3) на ВДПУ выбирает стрельбу из гранатомета, кнопкой (4) выбирает режим стрельбы, на экране (8) ВДПУ формируется прицельная марка гранатомета. Оператор с помощью джойстика (2) воздействует на привод (10) гранатомета (12). При перемещении гранатомета (10) перемещается и прицельная марка на экране (6) ВДПУ. При наложении прицельной марки на цель оператор производит стрельбу по ней из гранатомета (12).
Недостатком существующей системы управления огнем РТК ВН является отсутствие возможности вести сосредоточенный прицельный огонь всеми видами оружия одновременно по опасным целям (например, больших масс атакующей живой силы противника, обороняющейся в зданиях и оборудованных укрытиях живой силы противника), а также при огневой поддержке действий штурмовых групп.
Целью настоящего изобретения является обеспечение повышения эффективности подавления и уничтожения живой силы противника вооружением робототехнического комплекса в ходе боевых действий за счет сосредоточенного прицельного огня по цели всеми видами оружия одновременно.
Указанная цель достигается включением в систему управления огнем РТК ВН блока обеспечения сосредоточенного огня оружием РТК ВН и датчика согласования положения линий выстрелов различных типов оружия РТК ВН. На вход блока обеспечения сосредоточенного огня оружием РТК ВН поступает команда от оператора, а выходы связаны с входами баллистического вычислителя и датчика согласования положения линий выстрелов различных типов оружия РТК ВН, на другие входы которого поступают сигналы с баллистического вычислителя, пулемета и гранатомета, а выходы связаны с входами приводов наведения пулемета и гранатомета.
Сосредоточенный огонь РТК ВН по цели с предлагаемой системой управления огнем иллюстрируется фиг. 2. При обнаружении цели оператор (1) кнопкой (4) выбирает режимы стрельбы из пулемета и гранатомета, кнопкой (3) выбирает тип основного оружия (например, пулемет) для поражения цели и включает блок обеспечения сосредоточенного огня оружием РТК ВН (12). Блок (12) подает сигнал на включение датчика (13) согласования положения линий выстрелов различных типов оружия РТК ВН (пулемета и гранатомета). Оператор наводит джойстиком (2) лазерный дальномер (5) на цель и измеряет дальность до нее. Сигнал дальности поступает в баллистический вычислитель (6), который в соответствии с баллистикой выбранного типа оружия и с учетом сигналов датчиков условий стрельбы (7) формирует сигналы выноса точки прицеливания основного оружия (пулемета) по горизонтали и вертикали, и сигнал выноса точки прицеливания по вертикали вспомогательного оружия (гранатомета). Сигналы выноса точки прицеливания основного оружия формируют на экране ВПДУ (8) положение прицельной марки, а сигнал выноса точки прицеливания по вертикали вспомогательного оружия поступает на один из входа датчика (13) согласования положения линий выстрелов различных типов оружия РТК ВН. На два других входа датчика (13) поступают сигналы положения линий выстрела основного (11) и вспомогательного (12) оружия. Суммарный сигнал датчика (13) поступает на привод (10) вспомогательного оружия (12). При этом линия выстрела вспомогательного оружия (гранатомета - 12) приводится в согласованное с линией выстрела основного оружия (пулемета - 11) положение (с учетом различия баллистических характеристик). Оператор (1) с помощью джойстика (2) воздействует на привод (9) выбранного оружия - пулемета (11). При перемещении пулемета (11) синхронно перемещаются гранатомет (12) и прицельная марка на экране (8) ВДПУ. При наложении прицельной марки на цель оператор производит прицельную стрельбу по ней из пулемета (11) и гранатомета (12) одновременно.
Техническим решением предложенного изобретения является включение в систему управления огнем блока обеспечения сосредоточенного огня оружием РТК ВН и датчика согласования положения линий выстрелов различных типов оружия РТК ВН.
Техническим результатом предложенного изобретения является обеспечение повышения эффективности подавления и уничтожения живой силы противника вооружением робототехнического комплекса в ходе боевых действий за счет сосредоточенного прицельного огня по цели всеми видами оружия одновременно.
Литература:
1. Самоходный многоцелевой робот обеспечения боевых действий. Руководство по эксплуатации. ФРМИ. 459228000РЭ. - НАМИ, 2019 - 120 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления ударного робототехнического комплекса военного назначения | 2022 |
|
RU2791949C1 |
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
| Комплекс вооружения танка | 2023 |
|
RU2818147C1 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2015 |
|
RU2584766C1 |
| Боевой модуль с дистанционным управлением | 2018 |
|
RU2686896C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМОГО БОЕВОГО МОДУЛЯ | 2016 |
|
RU2629732C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2828680C1 |
Изобретение относится к системе управления огнем робототехнического комплекса военного назначения (РТК ВН), оснащенной несколькими видами оружия для уничтожения живой силы. В систему управления огнем включены блок обеспечения сосредоточенного прицельного огня оружием РТК ВН и датчик согласования положения линий выстрелов различных типов оружия РТК ВН. На вход блока обеспечения сосредоточенного огня оружием поступает команда от оператора, выходы связаны с входами баллистического вычислителя и датчика согласования положения линий выстрелов различных типов оружия, на другие входы которого поступают сигналы с баллистического вычислителя, пулемета и гранатомета, а выходы связаны с входами приводов наведения пулемета и гранатомета. Повышается эффективность подавления и уничтожения живой силы противника вооружением робототехнического комплекса в ходе боевых действий. 2 ил.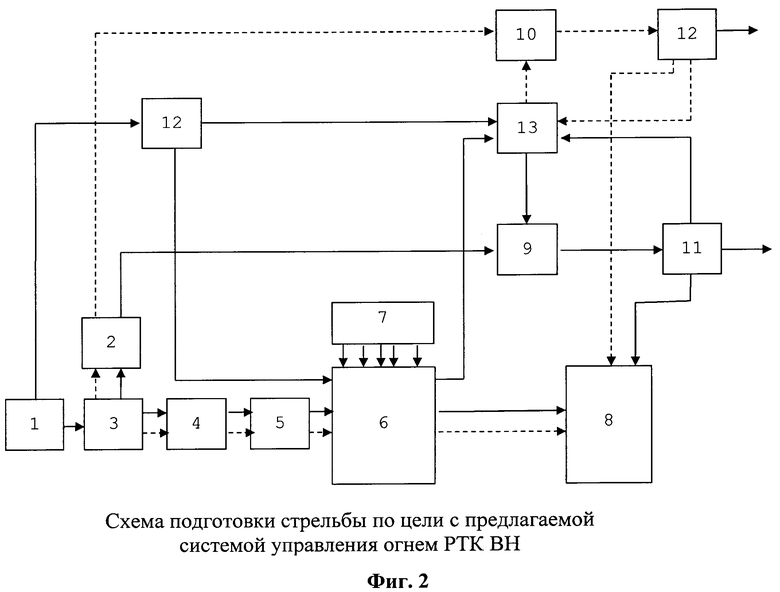
Система управления огнем робототехнического комплекса военного назначения (РТК ВН), оснащенная несколькими видами оружия для уничтожения живой силы противника и содержащая выносной пульт дистанционного управления РТК ВН с джойстиком управления наведением вооружения, экраном, кнопками выбора типа оружия и режимов стрельбы, лазерный дальномер, баллистический вычислитель, датчики условий стрельбы, приводы наведения оружия, отличающаяся тем, что в ней с целью повышения эффективности подавления и уничтожения живой силы противника вооружением РТК ВН за счет сосредоточенного прицельного огня по цели всеми видами оружия одновременно включены блок обеспечения сосредоточенного прицельного огня оружием РТК ВН и датчик согласования положения линий выстрелов различных типов оружия РТК ВН, причем на вход блока обеспечения сосредоточенного огня оружием РТК ВН поступает команда от оператора, а выходы связаны с входами баллистического вычислителя и датчика согласования положения линий выстрелов различных типов оружия РТК ВН, на другие входы которого поступают сигналы с баллистического вычислителя, различных типов оружия, а выходы связаны с входами приводов наведения различных типов оружия.
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| Робототехнический комплекс для ведения разведки и огневой поддержки | 2017 |
|
RU2686983C2 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
| WO 2012131548 A1, 04.10.2012 | |||
| US 20150108215 А1, 23.04.2015. | |||

