ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к способу управления вождением и устройству управления вождением.
УРОВЕНЬ ТЕХНИКИ
[0002] Режимы автономного вождения, устанавливаемые устройством управления транспортным средством, раскрытым в Патентном документе 1, включают в себя первый уровень и второй уровень, у которого степень вмешательства водителя меньше, чем у первого уровня. В устройстве управления движением транспортного средства из Патентного документа 1, если среда движения при управлении функционированием транспортного средства в режиме автономного вождения второго уровня определена в качестве предписанной среды движения, например, движение по дороге с низким коэффициентом сцепления (μ) из-за снега или наледи, то режим автономного вождения переключается на первый уровень.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Публикация международной заявки №.2019/003294
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Проблема, решаемая изобретением
[0004] Однако в устройстве управления транспортным средством из Патентного документа 1 существует проблема, заключающаяся в том, что уровень содействия автономному вождению должен быть снижен со второго уровня до первого уровня в соответствии с изменениями среды движения.
[0005] Задача, решаемая настоящим изобретением, заключается в обеспечении способа управления вождением и устройства управления вождением, которые могут создавать множество сред, в которых задействуемое транспортное средство может двигаться с относительно высоким уровнем содействия вождению.
Средство для решения проблемы
[0006] В способе управления вождением и устройстве управления вождением в соответствии с настоящим изобретением, когда перед задействуемым транспортным средством обнаруживается впереди идущее транспортное средство, то режим автономного вождения изменяется на режим, у которого уровень содействия вождению относительно высок, тем самым решая описанную выше проблему.
Полезные эффекты изобретения
[0007] Согласно настоящему изобретению, поскольку задействуемое транспортное средство, которое следует за впереди идущим транспортным средством, движется по маршруту, уже пройденному впереди идущим транспортным средством, то можно создать множество сред, в которых задействуемое транспортное средство может двигаться в режиме автономного вождения с относительно высоким уровнем содействия вождению.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
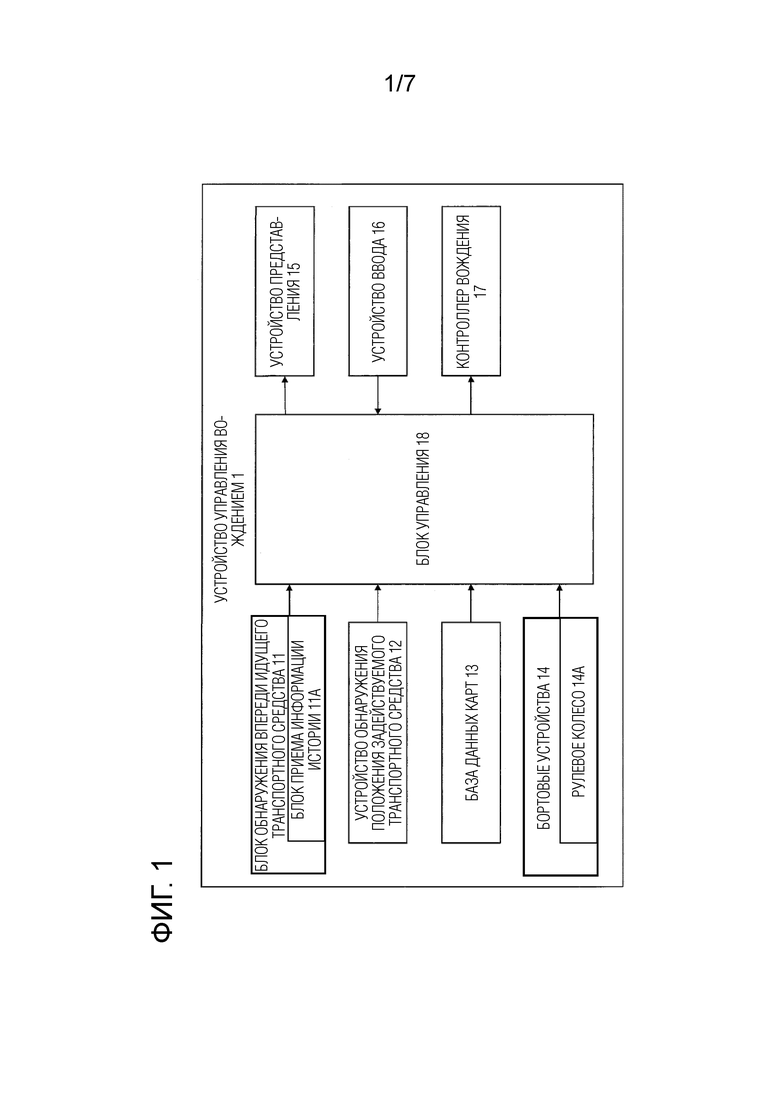
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства управления вождением согласно первому варианту осуществления настоящего изобретения.
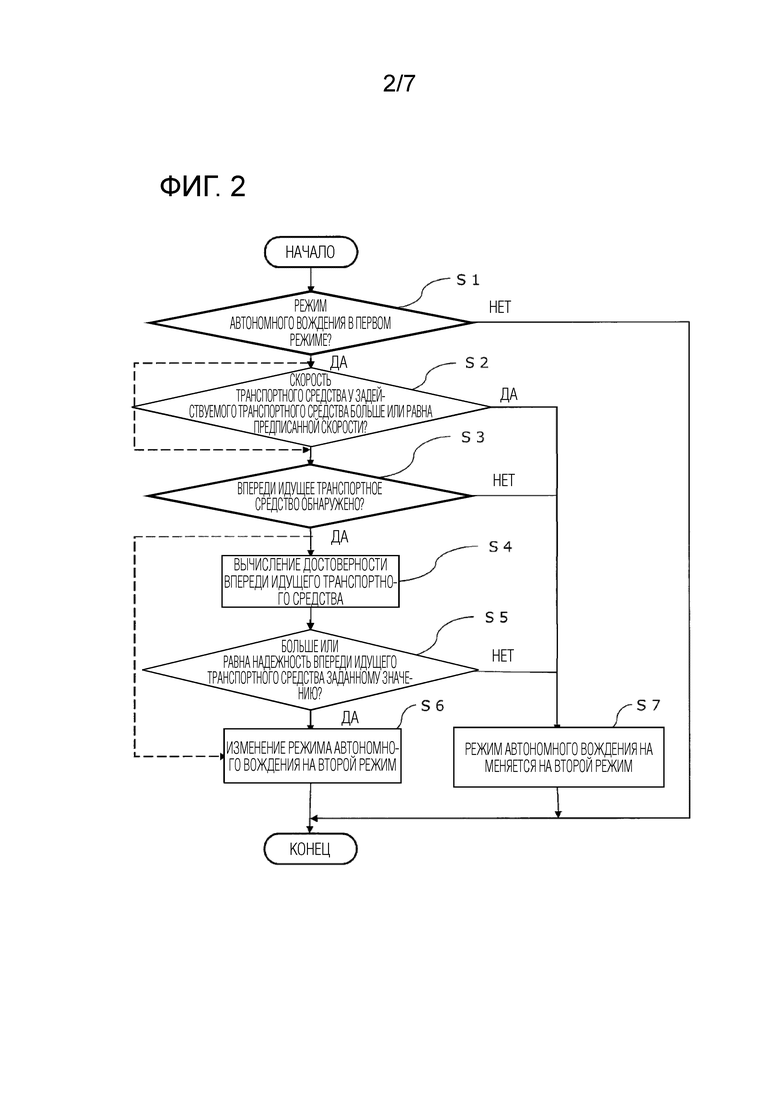
Фиг. 2 является блок-схемой последовательности операций, показывающей процедуру способа управления вождением, осуществляемого устройством управления вождением, показанным на Фиг. 1.
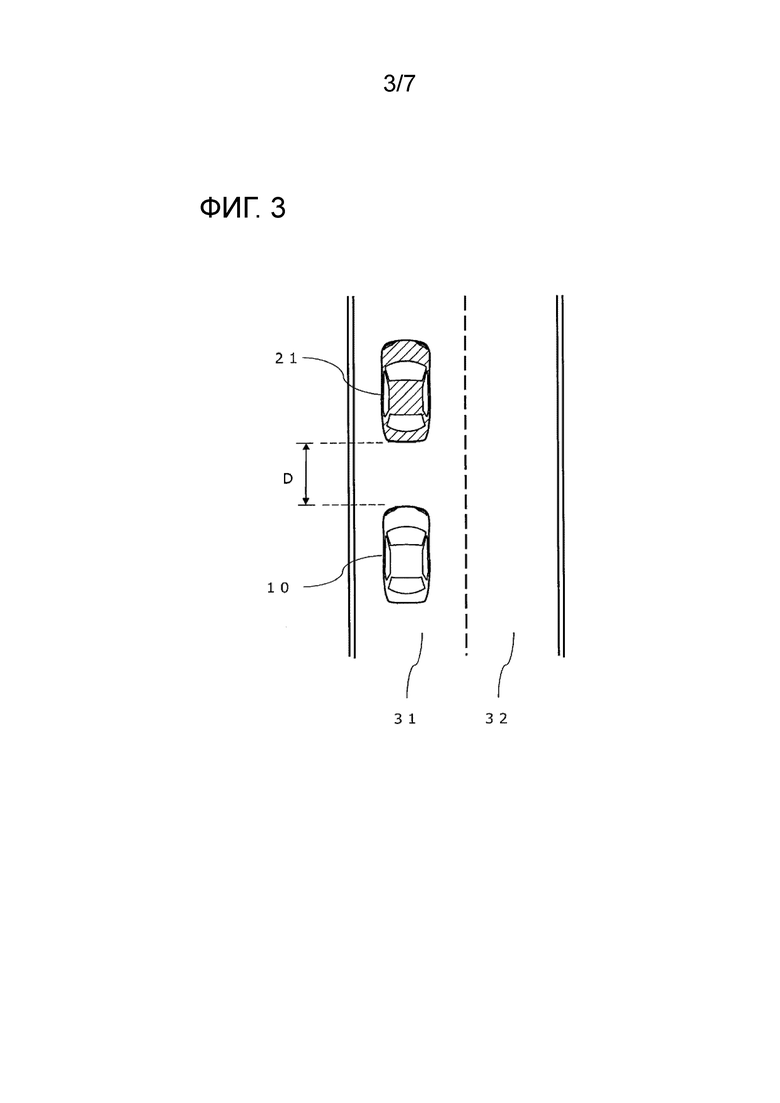
Фиг. 3 является схемой, показывающей пример взаимного расположения между задействуемым транспортным средством и впереди идущим транспортным средством в способе управления вождением, показанном на Фиг. 2.
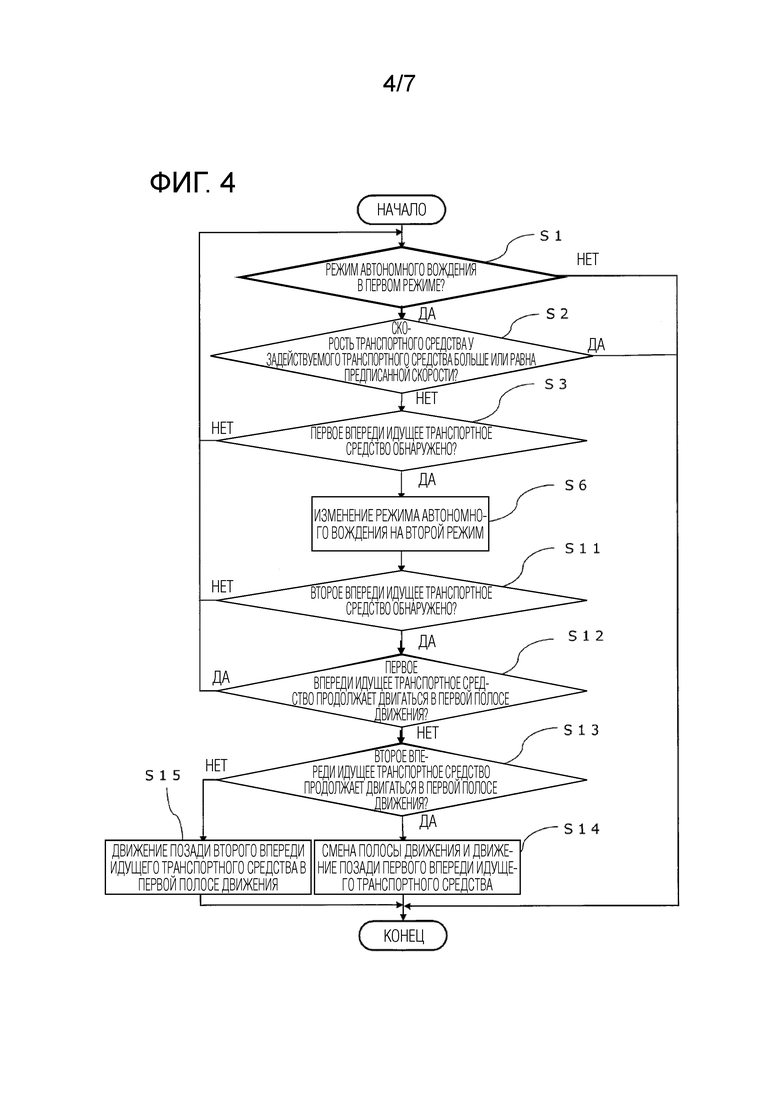
Фиг. 4 является блок-схемой последовательности операций, иллюстрирующей процедуру способа управления вождением, осуществляемую устройством управления вождением согласно второму варианту осуществления настоящего изобретения.
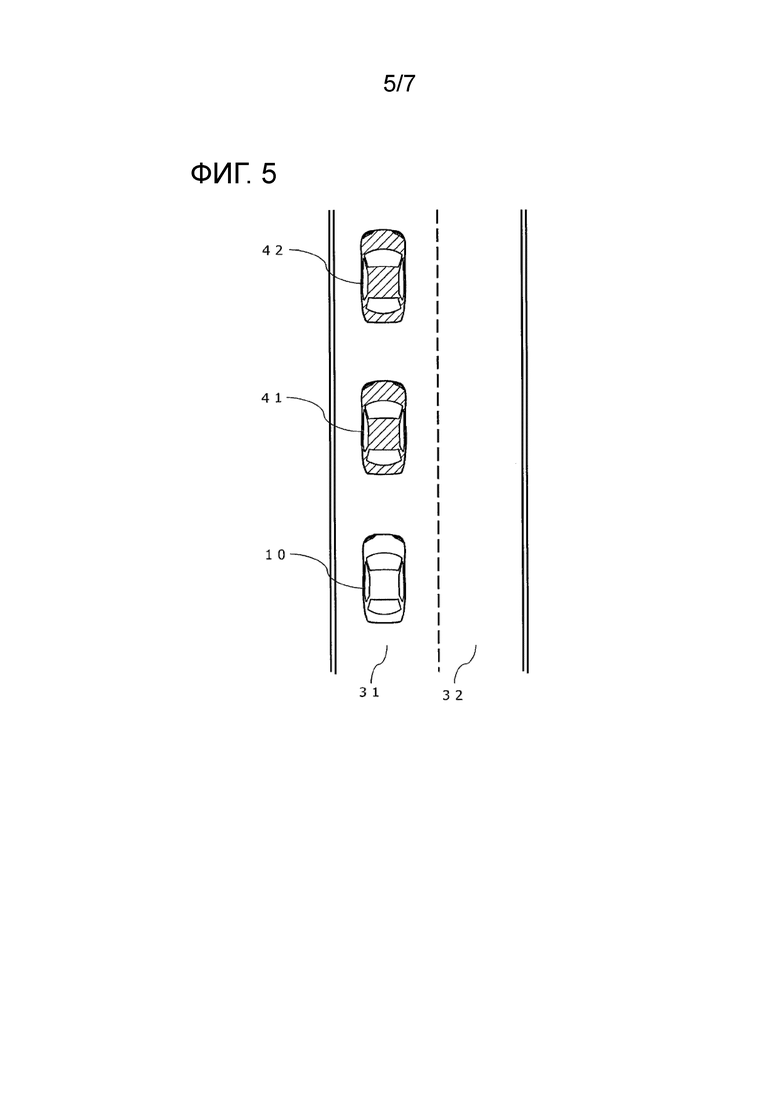
Фиг. 5 является схемой, показывающей пример взаимного расположения между задействуемым транспортным средством, первым впереди идущим транспортным средством и вторым впереди идущим транспортным средством в способе управления вождением, показанном на Фиг. 4.
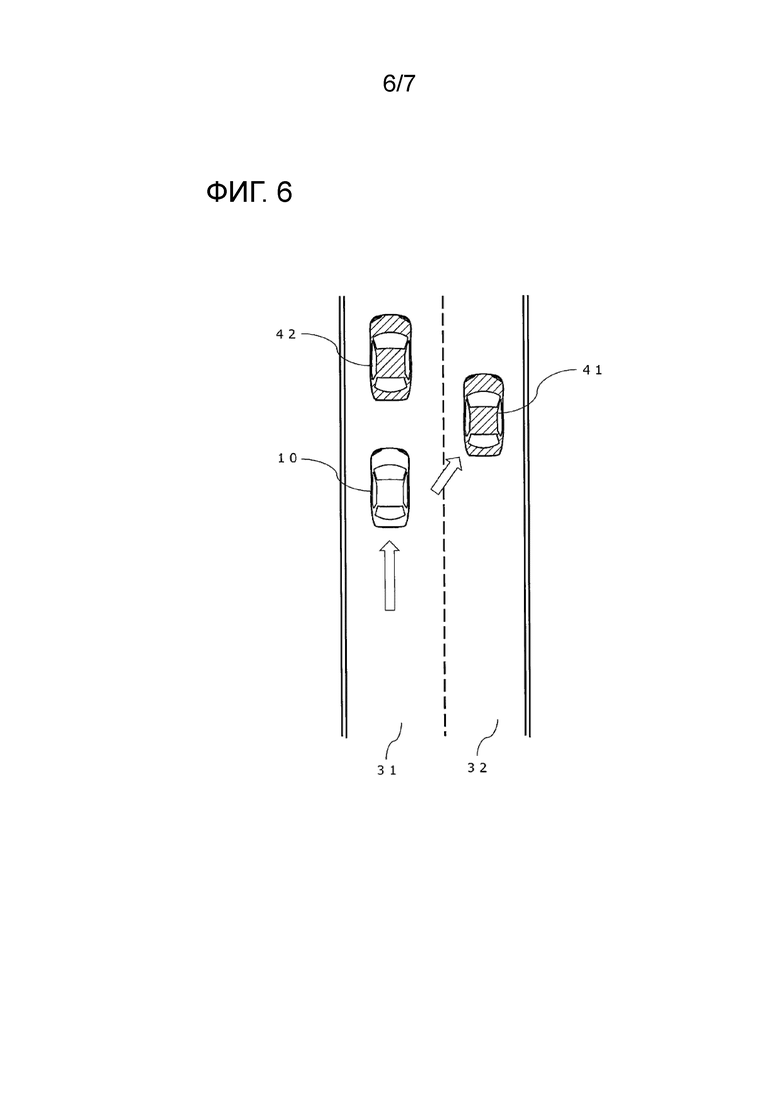
Фиг. 6 является схемой, показывающей пример взаимного расположения среди задействуемого транспортного средства, первого впереди идущего транспортного средства и второго впереди идущего транспортного средства, когда только первое впереди идущее транспортное средство меняет полосу движения в способе управления вождением, показанном на Фиг. 4.
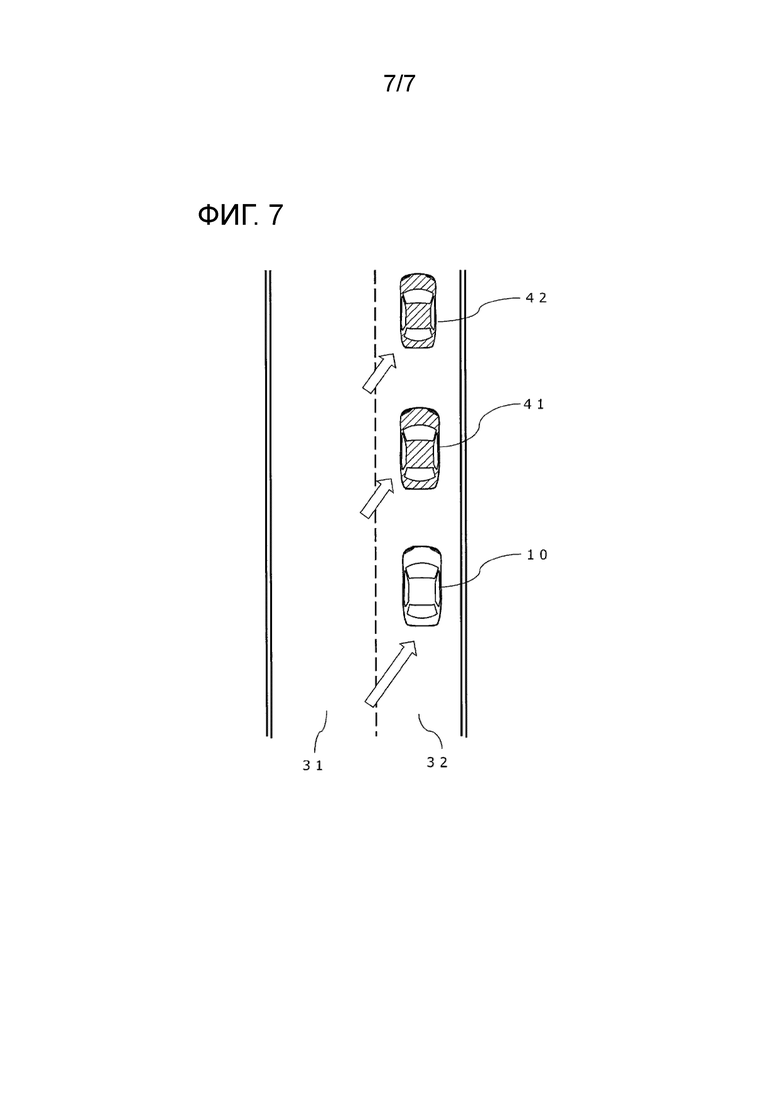
Фиг. 7 является схемой, показывающей пример взаимного расположения среди задействуемого транспортного средства, первого впереди идущего транспортного средства и второго впереди идущего транспортного средства, когда первое впереди идущее транспортное средство и второе впереди идущее транспортное средство меняют полосу движения в способе управления вождением, показанном на Фиг. 4.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЕ ДЛЯ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
[0009] Варианты осуществления настоящего изобретения будут описаны ниже со ссылкой на чертежи.
«Первый вариант осуществления»
Первый вариант осуществления будет описан со ссылкой на Фиг. 1-4. Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 1 управления вождением согласно настоящему варианту осуществления. Устройство 1 управления вождением согласно настоящему варианту осуществления также является одним вариантом осуществления для исполнения способа управления вождением согласно настоящему изобретению. Как показано на Фиг. 1, устройство 1 управления вождением транспортного средства в соответствии с настоящим вариантом осуществления содержит блок 11 обнаружения впереди идущего транспортного средства, устройство 12 обнаружения положения задействуемого транспортного средства, базу 13 данных карт, бортовые устройства 14, устройство 15 представления, устройство 16 ввода, контроллер 17 вождения и блок 18 управления. Эти устройства соединены, например, с CAN (вычислительной сетью контроллеров) и другими бортовыми локальными вычислительными сетями для взаимной отправки и приема информации.
[0010] Блок 11 обнаружения впереди идущего транспортного средства обнаруживает впереди идущее транспортное средство, то есть транспортное средство, движущееся перед задействуемым транспортным средством. Блок 11 обнаружения впереди идущего транспортного средства имеет переднюю камеру, которая фотографирует область впереди задействуемого транспортного средства, и/или передний радар, который обнаруживает впереди идущие транспортные средства и препятствия перед задействуемым транспортным средством. Кроме того, блок 11 обнаружения впереди идущего транспортного средства имеет блок 11а приема информации истории, который может принимать информацию истории движения о других транспортных средствах. Результат обнаружения блока 11 обнаружения впереди идущего транспортного средства выводится в блок 18 управления через предписанные интервалы времени.
[0011] Устройство 12 обнаружения положения задействуемого транспортного средства включает в себя блок GPS, гироскопический датчик, датчик скорости транспортного средства и т.п. Устройство 12 обнаружения положения задействуемого транспортного средства обнаруживает радиоволны, передаваемые от множества спутников связи, посредством блока GPS, периодически получает информацию о положении касаемо целевого транспортного средства (задействуемого транспортного средства) и обнаруживает текущее местоположение целевого транспортного средства на основе полученной информации о положении целевого транспортного средства, информации об изменении угла, полученной от гироскопического датчика, и скорости транспортного средства, полученной от датчика скорости транспортного средства. Информация о положении целевого транспортного средства, обнаруженная устройством 12 обнаружения положения задействуемого транспортного средства, выводится в блок 18 управления через предписанные интервалы времени.
[0012] База 13 данных карт является памятью для хранения высокоточной трехмерной картографической информации, которая включает в себя информацию о положении, касающуюся различных объектов и конкретных точек, к которой обеспечена возможность осуществления доступа из блока 18 управления. База 13 данных карт хранит высокоточную цифровую картографическую информацию (карта высокой точности, динамическая карта). В настоящем примере сохраненная высокоточная картографическая информация является трехмерной картографической информацией, которая включает в себя информацию о дорожном просвете, обнаруженную средствами транспортного средства получения данных, движущегося по реальным дорогам. Высокоточная картографическая информация включает в себя идентификационную информацию о многочисленных полосах движения на дорогах. Картографическая информация базы 13 данных карт включает в себя информацию о трехмерном положении относительно автомагистралей и/или дорог с изогнутыми полосами движения, а также размер изгибов (например, кривизну или радиус кривизны), точки слияния, точки разветвления и места сокращения полос движения. Высокоточная картографическая информация также включает в себя информацию, касающуюся объектов, таких как зоны обслуживания и парковки.
[0013] Бортовые устройства 14 установлены в транспортном средстве и функционируют посредством действий водителя. К бортовым устройствам 14 относится рулевое колесо 14а. Кроме того, примеры других бортовых устройств 14 включают в себя педаль акселератора, педаль тормоза, навигационное устройство, указатель сигнала поворота, стеклоочистители, фары, устройства подачи звуковых сигналов и другие специальные переключатели. Когда водитель задействует бортовые устройства 14, информация выводится в блок управления 18.
[0014] Устройство 15 представления является устройством, таким как дисплей, предусмотренный в навигационном устройстве, дисплей, встроенный в зеркало заднего вида, дисплей, встроенный в измерительный блок, проекционный дисплей, проецируемый на лобовое стекло, громкоговоритель, предусмотренный в звуковом устройстве, устройство сиденья, в которое встроено вибрирующее тело. Устройство 15 представления уведомляет водителю информацией о смене полосы движения и информацией представления, описанных далее ниже, в соответствии с управлением блока 18 управления.
[0015] Устройство 16 ввода является устройством, таким как кнопочный переключатель, в который возможен ввод посредством ручных операций водителем, сенсорная панель, расположенная на экране дисплея, или микрофон, в который возможен ввод посредством голоса водителя.
[0016] Контроллер 17 вождения управляет функционированием задействуемого транспортного средства. Например, контроллер 17 вождения управляет функционированием торможения, а также функционированием приводного механизма для регулировки ускорения/замедления и скорости транспортного средства (в том числе функционирование двигателя внутреннего сгорания в транспортном средстве с двигателем и функционирование мотора движения в системе электрического транспортного средства, в том числе распределение крутящего момента между двигателем внутреннего сгорания и мотором движения в гибридном транспортном средстве) посредством функции автономного управления скоростью. Кроме того, контроллер 17 вождения управляет функционированием исполнительного механизма рулевого управления посредством функции автономного управления рулевым управлением, тем самым выполняя управление рулевым управлением задействуемого транспортного средства. Например, контроллер 17 вождения обнаруживает разметку полосы движения, по которой движется задействуемое транспортное средство, и управляет положением движения (поперечным положением) задействуемого транспортного средства в направлении по ширине, так что задействуемое транспортное средство движется по центру полосы движения. Кроме того, контроллер 17 вождения управляет изменениями направления движения, обгоном транспортного средства, движущегося впереди задействуемого транспортного средства, и т.п. Кроме того, контроллер 17 вождения выполняет управление движением для поворота налево или направо на перекрестке и т.п. Кроме того, другие известные способы могут использоваться в качестве способа управления движением, осуществляемого контроллером 17 вождения.
[0017] Блок 18 управления состоит из ROM (постоянного запоминающего устройства), в котором хранится программа для управления функционированием задействуемого транспортного средства, CPU (центрального блока обработки), который исполняет программу, хранящуюся в этом ROM, и RAM (запоминающее устройство с произвольным доступом), которое функционирует как запоминающее устройство с возможностью доступа к нему. Что касается операционной схемы, то вместо CPU (центрального блока обработки) или в дополнение к нему могут использоваться MPU (микро блок обработки), DSP (процессор цифровых сигналов), ASIC (специализированная интегральная схема), FPGA (программируемая пользователем вентильная матрица) и т.д.
[0018] Блок 18 управления получает информацию о движении, относящуюся к состоянию движения задействуемого транспортного средства. Например, блок 18 управления получает в качестве информации о движении внешнюю по отношению к транспортному средству информацию изображения, захваченную передней камерой и задней камерой, а также результаты обнаружения переднего радара, заднего радара и боковых радаров. Кроме того, блок 18 управления также получает в качестве информации о движении информацию о скорости транспортного средства касаемо задействуемого транспортного средства, обнаруженную датчиком скорости транспортного средства, и информацию изображения лица водителя, захваченного бортовой камерой.
[0019] Кроме того, блок 18 управления получает в качестве информации о движении от устройства 12 обнаружения положения задействуемого транспортного средства информацию о текущем местоположении задействуемого транспортного средства. Кроме того, блок 18 управления получает в качестве информации о движении из базы 13 данных карт информацию о местоположении, такую как изогнутые дороги и размер изгибов (например, кривизну или радиус кривизны), точки слияния, точки разветвления, пункты взимания платы, места сокращения полос движения, зоны обслуживания (SA)/зоны парковки (PA) и т.п. Кроме того, блок 18 управления получает в качестве информации о движении от бортовых устройств 14 информацию о задействовании водителем бортовых устройств 14.
[0020] Кроме того, блок 18 управления исполняет программу, хранящуюся в ROM, посредством CPU, таким образом, автономно управляя скоростью транспортного средства и рулевым управлением задействуемого транспортного средства посредством функции автономного управления движением. Блок 18 управления передает в контроллер 17 вождения команды управления на основе функции автономного управления движением.
[0021] Блок 18 управления может устанавливать режим автономного вождения в соответствии с уровнем содействия вождению и содействовать движению задействуемого транспортного средства посредством установленного режима автономного вождения. Уровень содействия вождению указывает степень вмешательства, когда устройство 1 управления вождением содействует вождению транспортного средства посредством функции автономного управления движением. Вклад водителя в вождение транспортным средством уменьшается по мере увеличения уровня содействия вождению. В частности, уровень содействия вождению можно установить посредством определений и т.д. на основе SAE J3016 Общества автомобильных инженеров США (SAE). На уровне 0 содействия вождению все операции по вождению задействуемого транспортного средства выполняются водителем вручную. На уровне 1 содействия вождению, хотя операции по вождению задействуемого транспортного средства в основном выполняются посредством ручных действий водителя, контроллер 17 вождения надлежащим образом поддерживает ручные действия водителя посредством любой из функций, таких как автоматическое торможение, следование, удержание полосы движения и т.д. На уровне 2 содействия вождению, несмотря на то, что операции по вождению задействуемого транспортного средства в основном выполняются посредством ручных действий водителя, при конкретных условиях контроллер 17 вождения может объединять множество функций, среди которых функция автоматического торможения, функция следования, функция удержания полосы движения и т.д., тем самым выполняя функцию содействия вождению. На уровне 3 содействия вождению контроллер 17 вождения выполняет все задачи вождения, но водитель должен возобновлять управление и быть готовым к вождению вручную по запросу устройства 1 управления вождением. На уровне 4 содействия вождению при конкретных условиях ручное вождение водителем не требуется, и контроллер 17 вождения может выполнять все задачи вождения и наблюдать за окружающими условиями задействуемого транспортного средства. На уровне 5 содействия вождению контроллер 17 вождения может выполнять все задачи вождения при любых условиях. Классификация уровней содействия вождению не ограничивается классификацией согласно определениям Общества автомобильных инженеров США и может быть определена на основе ISO/TC204 Международной организации по стандартизации (ISO). Кроме того, классификация уровней содействия вождению может определяться другими критериями при условии, что они должным образом классифицируются в соответствии со степенью вмешательства устройства 1 управления вождением.
[0022] В качестве режимов автономного вождения блок 18 управления может установить первый режим, который соответствует уровню 2 содействия вождению, и второй режим, который соответствует уровню 3 содействия вождению. Если режим автономного вождения установлен в первый режим, водитель должен визуально наблюдать за окружающими условиями задействуемого транспортного средства. Кроме того, первый режим является режимом с задействованием рук. Режим с задействованием рук является режимом, в котором автономное управление рулевым управлением блоком 18 управления не функционирует, когда водитель не держит рулевое колесо 14а. То, держит ли водитель рулевое колесо 14а, обнаруживается датчиком крутящего момента рулевого управления (не показан) в EPS или сенсорным датчиком (не показан), предусмотренным на рулевом колесе 14а. «Водитель держит рулевое колесо 14а» не ограничивается состоянием, в котором водитель крепко держит рулевое колесо 14а, но также включает в себя состояние, в котором водитель слегка касается рулевого колеса 14а.
[0023] С другой стороны, если режим автономного вождения установлен во второй режим, система устройства 1 управления вождением наблюдает за окружающими условиями задействуемого транспортного средства с использованием камеры, радара и т.п. То есть, если режим автономного вождения установлен во второй режим, наблюдение за средой движения вокруг задействуемого транспортного средства автоматически осуществляется системой устройства 1 управления вождением. Кроме того, второй режим является режимом без задействования рук. Режим без задействования рук является режимом, в котором управление рулевым управлением посредством блока 18 управления функционирует, даже если руки водителя убраны с рулевого колеса 14а. Управление рулевым управлением блоком 18 управления осуществляется через контроллер 17 вождения, как описано выше.
[0024] Взаимосвязь между первым режимом и вторым режимом может быть любой взаимосвязью при условии, что уровень содействия вождению второго режима находится на более высоком уровне поддержки, чем первый режим, и уровень содействия вождению, соответствующий каждому режиму автономного вождения, не ограничивается уровнем 2 содействия вождению и уровнем 3 содействия вождению. Кроме того, помимо первого режима и второго режима, другие режимы автономного вождения, которые соответствуют различным уровням содействия вождению, могут быть установлены блоком 18 управления. В настоящем варианте осуществления может быть предусмотрен режим, имеющий более низкий уровень содействия вождению, чем первый режим, и может быть предоставлен режим, имеющий более высокий уровень содействия вождению, чем второй режим. Один или множество режимов, имеющих уровень содействия вождению выше, чем первый режим, и ниже, чем второй режим, могут быть установлены между первым режимом и вторым режимом.
[0025] Хотя это и не ограничивается особым образом, устройство 1 управления вождением в соответствии с настоящим вариантом осуществления выполняет функцию автономного вождения, которая может переключать режим автономного вождения между режимом с задействованием рук первого режима и режимом без задействования рук второго режима. Из функций автономного вождения переключение режима с задействованием рук и режима без задействования рук эффективно используется функцией автономного управления рулевым управлением. Функция автономного управления рулевым управлением предназначена для выполнения управления рулевым управлением задействуемого транспортного средства посредством управления функционированием исполнительного механизма рулевого управления, тем самым содействуя действию водителя с рулевым колесом. Эта функция автономного управления рулевым управлением включает в себя, например, функцию центрирования полосы движения, которая управляет рулевым управлением так, чтобы поддерживать транспортное средство примерно в центре полосы движения, функцию удержания полосы движения для управления поперечным положением транспортного средства, чтобы двигаться в той же полосе движения, функцию содействия при смене полосы движения для перемещения с полосы движения вождения на другую полосу движения, функцию содействия при обгоне для перемещения вперед посредством прохождения рядом с другим транспортным средством (в соседней полосе), которое движется впереди, и функцию содействия движению по маршруту для автономной смены полосы движения для следования по маршруту к месту назначения. Хотя это и не ограничивается особым образом, устройство 1 управления вождением согласно настоящему варианту осуществления выполняет описанную выше функцию автономного управления рулевым управлением в режиме без задействования рук, когда выполняется любое одно или все из следующих условий. То есть, когда выполняются некоторые или все из следующих условий, функция автономного управления рулевым управлением может выполняться в режиме без задействования рук второго режима, то есть, даже если руки водителя убраны с рулевого колеса.
[0026] В качестве одного примера ниже показаны условия для переключения в режим без задействования рук в функции центрирования полосы движения.
- Задействуемое транспортное средство движется по специально предназначенной автомобильной дороге.
- Транспортное средство движется по дороге, конструктивно отделенной от встречной полосы движения.
- Транспортное средство движется по дороге, для которой имеется высокоточная карта и для которой эффективно использование высокоточной картографической информации.
- Транспортное средство движется со скоростью, меньшей или равной ограничению скорости.
- Транспортное средство движется по дороге, ограничение скорости которой больше или равно предписанной скорости (например, 60 км/ч).
- Глобальная навигационная спутниковая система: Сигналы GNSS эффективны.
- Камера наблюдения за водителем распознает водителя и обнаруживает, что водитель смотрит вперед.
- Водитель смотрит вперед.
- Было подтверждено, что поблизости от текущего местоположения (например, в пределах 800 м впереди) нет пунктов взимания платы, съездов с автомагистралей, точек слияния, перекрестков или точек сокращения полос движения.
- Рядом с текущим местоположением (например, в пределах 500 м впереди) нет крутых изгибов в 100 R или менее.
- Педаль акселератора не нажата.
- Никаких отклонений не обнаружено от любого из радара, сонара, камеры наблюдения за периферией транспортного средства и камеры наблюдения за водителем.
[0027] Если какое-либо одно из вышеописанных условий не удовлетворяется во время выполнения функции центрирования полосы движения с использованием режима без задействования рук, то выполняется переключение на функцию центрирования полосы движения посредством режима с задействованием рук. Условия, при которых разрешается режим без задействования рук, который является вторым режимом, могут быть заданы для каждой функции автономного вождения (функции удержания полосы движения, функции содействия при смене полосы движения, функции содействия при обгоне или функции содействия при движении по маршруту). Разумеется, обязательным условием является выполнение условий для активации функций автономного вождения.
[0028] Далее процедура способа управления вождением, осуществляемого устройством 1 управления вождением, будет описана со ссылкой на Фиг. 2 и 3. На Фиг. 3 показано задействуемое транспортное средство 10, движущееся в первой полосе 31 движения, и впереди идущее транспортное средство 21, движущееся перед задействуемым транспортным средством 10.
[0029] Как показано на Фиг. 2, на этапе S1 устройство 1 управления вождением определяет, является ли режим автономного вождения задействуемого транспортного средства 10 первым режимом. Если режим автономного вождения задействуемого транспортного средства 10 не является первым режимом, текущее управление завершается.
[0030] С другой стороны, если режим автономного вождения задействуемого транспортного средства 10 является первым режимом, управление переходит к этапу S2. На этапе S2 устройство 1 управления вождением определяет, является ли скорость транспортного средства у задействуемого транспортного средства 10 больше или равной предписанной скорости. Если скорость задействуемого транспортного средства 10 больше или равна предписанной скорости, то режим автономного вождения не изменяется и управление прекращается. Предписанная скорость является верхней предельной скоростью, при которой предполагается, что устройство 1 управления вождением или водитель могут быстро реагировать, даже когда впереди идущее транспортное средство 21 внезапно замедляется или резко останавливается, когда режим автономного вождения задействуемого транспортного средства 10 установлен во второй режим. Предписанную скорость можно установить экспериментально. «Предписанная скорость» в этом случае является скоростью в 100-130 км/ч и может быть задана в соответствии с характеристиками и т. д. задействуемого транспортного средства 10. Если определено, что режим автономного вождения задействуемого транспортного средства 10 является первым режимом на этапе S1, процесс может перейти к этапу S3, описанному ниже, без прохождения этапа S2, как показано пунктирной линией на Фиг. 2.
[0031] Если определено, что скорость задействуемого транспортного средства 10 меньше предписанной скорости на этапе S2, управление переходит к этапу S3. На этапе S3 устройство 1 управления вождением определяет, обнаружил ли блок 11 обнаружения впереди идущего транспортного средства впереди идущее транспортное средство 21, движущееся перед задействуемым транспортным средством 10. То есть устройство 1 управления вождением определяет, было ли обнаружено впереди идущее транспортное средство 21, движущееся перед задействуемым транспортным средством 10. Блок 11 обнаружения впереди идущего транспортного средства обнаруживает присутствие впереди идущего транспортного средства 21 на основе информации изображения, захваченной передней камерой, или результата обнаружения переднего радара. Впереди идущее транспортное средство 21 является транспортным средством, движущимся непосредственно перед задействуемым транспортным средством 10. Кроме того, блок 11a приема информации истории блока 11 обнаружения впереди идущего транспортного средства принимает информацию истории движения о других транспортных средствах посредством связи "транспортное средство - транспортное средство", связи "дорога - транспортное средство" или других средств обмена информацией об инфраструктуре. Информация истории движения связывает места и время проезда других транспортных средств. Информация истории движения может собираться в предписанном цикле, собираться в соответствии с передачей от другого транспортного средства или собираться посредством ограничения дальности положений. Затем, если информация истории движения включает в себя информацию, указывающую, что другое транспортное средство двигалось в точке перед задействуемым транспортным средством 10 в предписанное время ранее (например, в пределах предписанного периода времени от текущего времени), то обнаруживается присутствие другого транспортного средства, движущегося перед задействуемым транспортным средством 10, т.е. впереди идущее транспортное средство 21. Если присутствие впереди идущего транспортного средства 21 не обнаружено перед задействуемым транспортным средством 10, то управление переходит на этап S7. Затем, на этапе S7, устройство 1 управления вождением выполняет управление, которое не переключает режим автономного вождения во второй режим. Управление, которое не переключает режим автономного вождения во второй режим, включает в себя управление, которое поддерживает режим автономного вождения в первом режиме, и управление, которое изменяет режим автономного вождения на другой режим, у которого уровень содействия вождению ниже, чем у первого режима. Здесь «другой режим, у которого уровень содействия вождению ниже, чем у первого режима», является, например, третьим режимом, в котором выполняются только некоторые из операций вождения. Предписанный период времени составляет, например, пять секунд, но при этом не налагается никаких ограничений, и может быть периодом времени продолжительностью от нескольких секунд до нескольких десятков секунд. Этот предписанный период времени предпочтительно находится в пределах одной минуты.
[0032] Кроме того, «впереди идущее транспортное средство 21, движущееся перед задействуемым транспортным средством 10» не ограничивается другим транспортным средством, движущимся перед задействуемым транспортным средством 10 в первой полосе 31 движения, по которой в настоящее время движется задействуемое транспортное средство 10. То есть впереди идущее транспортное средство 21 может быть другим транспортным средством, движущимся по полосе движения, по которой задействуемое транспортное средство 10 планируется двигаться в будущем. Например, в случае, когда задействуемое транспортное средство 10 запланировано для смены полосы движения через несколько секунд по заранее спланированному маршруту движения, если другое транспортное средство присутствует на второй полосе 32 движения, которая является пунктом назначения смены полосы движения, то это другое транспортное средство может обнаруживаться как «впереди идущее транспортное средство 21, движущееся перед задействуемым транспортным средством 10». Кроме того, в случае, если задействуемое транспортное средство 10 запланировано совершить правый или левый поворот на разветвленной дороге или перекрестке через несколько секунд, если в пункте назначения правого или левого поворота находится другое транспортное средство, то это другое транспортное средство может обнаруживаться как «впереди идущее транспортное средство 21, движущееся перед задействуемым транспортным средством 10».
[0033] Верхнее предельное расстояние обнаруживаемого расстояния D от задействуемого транспортного средства 10 до впереди идущего транспортного средства 21 больше, чем верхнее предельное расстояние расстояния возможного следования от задействуемого транспортного средства 10 до впереди идущего транспортного средства 21, когда операция следования за впереди идущим транспортным средством 21 выполняется с использованием первого режима. Если операция следования выполняется с использованием первого режима с относительно низким уровнем содействия вождению, то верхнее предельное расстояние расстояния возможного следования устанавливается с целью управления задействуемым транспортным средством 10 таким образом, чтобы быть связанным с перемещением впереди идущего транспортного средства 21. С другой стороны, в настоящем варианте осуществления верхнее предельное расстояние обнаруживаемого расстояния D до впереди идущего транспортного средства 21 устанавливается с целью подтверждения отсутствия препятствий на маршруте (полосе движения), по которому задействуемое транспортное средство 10 позади впереди идущего транспортного средства 21 должно двигаться в будущем. Из-за этой разницы в назначении «верхнее предельное расстояние обнаруживаемого расстояния D до впереди идущего транспортного средства 21» в качестве условия для переключения во второй режим с относительно высоким уровнем содействия вождению устанавливается больше, чем верхнее предельное расстояние расстояния возможного следования. Здесь «выполнение операции следования за впереди идущим транспортным средством 21» означает, что устройство 1 управления вождением управляет функционированием задействуемого транспортного средства 10 так, чтобы быть связанным с перемещением впереди идущего транспортного средства 21 и управлять скоростью транспортного средства задействуемого транспортного средства 10 таким образом, чтобы задействуемое транспортное средство 10 и впереди идущее транспортное средство 21 сохраняли постоянное расстояние. С другой стороны, «задействуемое транспортное средство 10, движущееся позади впереди идущего транспортного средства 21» означает, что задействуемое транспортное средство 10 движется позади впереди идущего транспортного средства 21 по маршруту движения, по которому впереди идущее транспортное средство 21 уже проехало, независимо от наличия/отсутствия операции следования за впереди идущим транспортным средством 21. То есть, когда задействуемое транспортное средство 10 движется позади впереди идущего транспортного средства 21, операция следования за впереди идущим транспортным средством 21 может выполняться или не выполняться.
[0034] Кроме того, верхнее предельное расстояние расстояния возможного следования может быть установлено на основе расстояния, на котором задействуемое транспортное средство 10 и впереди идущее транспортное средство 21 осуществляют связь "транспортное средство - транспортное средство". По этой причине верхнее предельное расстояние обнаруживаемого расстояния D от задействуемого транспортного средства 10 до впереди идущего транспортного средства 21, которое может быть обнаружено блоком 11 обнаружения впереди идущего транспортного средства устройства 1 управления вождением, может быть установлено больше, чем верхнее предельное расстояние, на котором задействуемое транспортное средство 10 и впереди идущее транспортное средство 21 могут осуществлять связь "транспортное средство - транспортное средство". Верхнее предельное расстояние обнаруживаемого расстояния D до впереди идущего транспортного средства 21, которое может быть обнаружено блоком 11 обнаружения впереди идущего транспортного средства, составляет, например, 100 м, но не ограничивается этим. Кроме того, верхнее предельное расстояние, на котором задействуемое транспортное средство 10 и впереди идущее транспортное средство 21 могут осуществлять связь "транспортное средство - транспортное средство", составляет, например, 50 м, но не ограничивается этим.
[0035] Затем, если обнаружено, что впереди идущее транспортное средство 21 находится перед задействуемым транспортным средством 10, на этапе S3, то устройство 1 управления вождением вычисляет достоверность для впереди идущего транспортного средства 21 на этапе S4. Надежность впереди идущего транспортного средства 21 является стандартом, указывающим на стабильность движения впереди идущего транспортного средства 21. Надежность впереди идущего транспортного средства 21 вычисляется на основе поведения впереди идущего транспортного средства 21. В частности, надежность впереди идущего транспортного средства 21 вычисляется на основе по меньшей мере одного из: величины поперечного смещения впереди идущего транспортного средства 21, частоты ускорения/замедления и частоты свечения стоп-сигналов. Величина поперечного смещения впереди идущего транспортного средства 21, частота ускорения/торможения и частота свечения стоп-сигналов соответственно вычисляются как значения в предписанное время или на предписанном расстоянии. Чем больше величина поперечного смещения впереди идущего транспортного средства 21, чем больше частота ускорения/замедления и чем выше частота свечения стоп-сигналов, тем выше оценка нестабильности движения впереди идущего транспортного средства 21 и тем ниже надежность. С другой стороны, чем меньше относительная величина поперечного смещения впереди идущего транспортного средства 21, чем ниже частота ускорения/замедления или чем ниже частота свечения стоп-сигналов, тем выше оценка стабильности движения впереди идущего транспортного средства 21, и тем выше надежность. Устройство 1 управления вождением может присваивать баллы величине поперечного смещения впереди идущего транспортного средства 21, частоте ускорения/замедления и частоте свечения стоп-сигналов соответственно и вычислять надежность впереди идущего транспортного средства 21 посредством суммирования баллов.
[0036] С другой стороны, если впереди идущее транспортное средство 21 не обнаружено перед задействуемым транспортным средством 10 на этапе S3, то управление переходит к этапу S7, и устройство 1 управления вождением выполняет управление, которое не переключает режим автономного вождения во второй режим.
[0037] Кроме того, если впереди идущее транспортное средство 21 обнаружено перед задействуемым транспортным средством 10 на этапе S3, управление переходит к этапу S6, как показано пунктирной линией на Фиг. 2, и устройство 1 управления вождением может переключить режим автономного вождения с первого режима во второй режим. Устройство 1 управления вождением определяет, что с высокой вероятностью маршрут, по которому проехало впереди идущее транспортное средство 21, может быть пройден задействуемым транспортным средством 10 без столкновения с препятствиями/помехами, и что возможно повысить уровень содействия автономного вождения. В настоящем варианте осуществления можно использовать условие, что впереди идущее транспортное средство 21 обнаружено перед задействуемым транспортным средством 10, тем самым снова находя/создавая среду, в которой автономное вождение может быть выполнено в режиме, у которого уровень содействия относительно высокий. В результате устройство 1 управления вождением по настоящему варианту осуществления может расширить условия, при которых автономное вождение задействуемым транспортным средством 10 может осуществляться плавно в состоянии, у которого уровень содействия вождению является высоким, тем самым снижая нагрузку на водителя.
[0038] Затем устройство 1 управления вождением определяет, является ли надежность впереди идущего транспортного средства 21 большей или равной предварительно определенному заданному значению на этапе S5. Это заданное значение является нижним предельным значением надежности, указывающим, что движение впереди идущего транспортного средства 21 является стабильным в той степени, в которой для задействуемого транспортного средства 10 возможно плавное движение позади впереди идущего транспортного средства 21 в состоянии, в котором режим автономного вождения установлен во второй режим. Если определено, что надежность впереди идущего транспортного средства 21 меньше заданного значения, то управление переходит к этапу S7, и устройство 1 управления вождением выполняет управление, которое не переключает режим автономного вождения во второй режим.
[0039] С другой стороны, если определено, что надежность впереди идущего транспортного средства 21 больше или равна заданному значению на этапе S5, то устройство 1 управления вождением переключает режим автономного вождения с первого режима во второй режим на этапе S6, и управление завершается.
[0040] Как описано выше, в устройстве 1 управления вождением и способе управления вождением согласно настоящему варианту осуществления, в случае, когда управление функционированием задействуемого транспортного средства 10 осуществляется посредством первого режима, если блок обнаружения впереди идущего транспортного средства 11 обнаруживает присутствие впереди идущего транспортного средства 21, движущегося перед задействуемым транспортным средством 10, то режим автономного вождения переключается с первого режима во второй режим. Это происходит потому, что устройство 1 управления вождением определяет, что появление мешающих препятствий или помех маловероятно, когда задействуемое транспортное средство 10 движется по маршруту, по которому уже проехало впереди идущее транспортное средство 21, и способно определить, что можно увеличить уровень содействия вождению автономного вождения. В этом случае, поскольку впереди идущее транспортное средство 21 движется перед задействуемым транспортным средством 10, можно предположить, что маршрут, по которому в будущем запланировано движение задействуемого транспортного средства 10, не имеет препятствий, мешающих движению задействуемого транспортного средства 10, строительных площадок, требующих смены полосы движения и т. д. Следовательно, можно ожидать, что задействуемое транспортное средство 10 может повысить уровень содействия вождению в режиме автономного вождения и плавно двигаться позади впереди идущего транспортного средства 21. То есть устройство 1 управления вождением может расширить условия, при которых задействуемое транспортное средство 10 может плавно управляться в состоянии, при котором уровень содействия вождению в режиме автономного вождения относительно высок, тем самым уменьшая нагрузку на водителя.
[0041] Кроме того, если обнаружено, что впереди идущее транспортное средство 21 присутствует, когда управление функционированием задействуемого транспортного средства 10 осуществляется посредством первого режима, устройство 1 управления вождением вычисляет надежность впереди идущего транспортного средства 21 на основе поведения впереди идущего транспортного средства 21. Затем, если вычисленная надежность впереди идущего транспортного средства 21 меньше, чем предварительно определенное заданное значение, то устройство 1 управления вождением не переключает режим автономного вождения во второй режим. Если вычисленная надежность впереди идущего транспортного средства 21 больше или равна предварительно определенному заданному значению, то устройство 1 управления вождением затем переключает режим автономного вождения во второй режим. В результате задействуемое транспортное средство 10 может увеличить уровень содействия вождению режима автономного вождения и плавно двигаться позади впереди идущего транспортного средства 21, которое имеет высокую надежность, то есть стабильное поведение. Кроме того, устройство 1 управления вождением определяет, что маршрут, пройденный впереди идущим транспортным средством 21, надежность которого больше или равна заданному значению, является надежным. Это происходит потому, что устройство 1 управления вождением определяет маловероятность появления препятствий или помех, когда задействуемое транспортное средство 10 движется по маршруту, на котором продвигалось впереди идущее транспортное средство 21, имеющее надежность, которая больше или равна заданному значению, и может определить, что можно повысить уровень содействия вождению автономного вождения.
[0042] Кроме того, если вычисленная надежность впереди идущего транспортного средства 21 меньше, чем предварительно определенное заданное значение, то устройство 1 управления вождением не переключает режим автономного вождения во второй режим и поддерживает первый режим. В результате, если надежность впереди идущего транспортного средства 21 меньше заданного значения, то управление функционированием задействуемого транспортного средства 10 осуществляется в состоянии, в котором режим автономного вождения сохраняется в первом режиме, так что даже в случае внезапного возникновения неисправности/проблемы, ее можно будет гибко решить посредством действий ручного вождения водителем.
[0043] Кроме того, устройство 1 управления вождением вычисляет надежность впереди идущего транспортного средства 21 на основе по меньшей мере одного из: величины поперечного смещения впереди идущего транспортного средства 21, частоты ускорения/замедления и частоты свечения стоп-сигналов. В результате устройство 1 управления вождением может вычислить надежность впереди идущего транспортного средства 21 на основе конкретного поведения впереди идущего транспортного средства 21. Следовательно, если впереди идущее транспортное средство 21 отклоняется влево и вправо, часто ускоряется или часто повторяет операции торможения, вызывающие частое свечение стоп-сигналов, то надежность впереди идущего транспортного средства 21 определяется как низкая, и устройство 1 управления вождением не переключает режим автономного вождения во второй режим. С другой стороны, если надежность впереди идущего транспортного средства 21 высокая, впереди идущее транспортное средство 21 движется с почти постоянной скоростью без отклонений влево и вправо от центра первой полосы 31 движения, и частота внезапных торможений низкая, то задействуемое транспортное средство 10 может плавно двигаться позади впереди идущего транспортного средства 21 в состоянии, в котором режим автономного вождения установлен во второй режим.
[0044] Кроме того, верхнее предельное расстояние обнаруживаемого расстояния D от задействуемого транспортного средства 10 до впереди идущего транспортного средства 21, которое может быть обнаружено устройством 1 управления вождением, может быть установлено больше, чем верхнее предельное расстояние расстояния возможного следования от задействуемого транспортного средства 10 до впереди идущего транспортного средства 21, когда операция следования за впереди идущим транспортным средством выполняется с использованием первого режима. Кроме того, верхнее предельное расстояние обнаруживаемого расстояния D от задействуемого транспортного средства 10 до впереди идущего транспортного средства 21, которое может быть обнаружено устройством 1 управления вождением, может быть установлено больше, чем верхнее предельное расстояние, на котором задействуемое транспортное средство 10 и впереди идущее транспортное средство 21 может осуществлять связь "транспортное средство - транспортное средство". В результате, даже если расстояние между задействуемым транспортным средством 10 и впереди идущим транспортным средством 21 достаточно велико, чтобы задействуемое транспортное средство 10 не могло следовать за впереди идущим транспортным средством 21, устройство 1 управления вождением может переключить режим автономного вождения задействуемого транспортного средства 10 во второй режим и предписать задействуемому транспортному средству 10 двигаться позади впереди идущего транспортного средства 21. То есть задействуемое транспортное средство 10 может плавно двигаться по маршруту, по которому уже проехало впереди идущее транспортное средство 21, в состоянии, в котором режим автономного вождения установлен во второй режим, даже не следуя за впереди идущим транспортным средством 21, посредством движения позади обнаруженного впереди идущего транспортного средства 21.
[0045] Если блок 11a приема информации истории принимает информацию истории движения о других транспортных средствах, и информация истории движения включает в себя информацию, указывающую, что другое транспортное средство двигалось в точке перед задействуемым транспортным средством в течение предписанного периода времени, то устройство управления вождением 1 обнаруживает это другое транспортное средство в качестве впереди идущего транспортного средства 21, движущегося перед задействуемым транспортным средством 10. В результате, даже если впереди идущее транспортное средство 21 не может быть обнаружено передней камерой или передним радаром, устройство 1 управления вождением может обнаружить присутствие впереди идущего транспортного средства 21, движущегося перед задействуемым транспортным средством 10. В частности, блок 11а приема информации истории может обнаружить, что впереди идущее транспортное средство 21 находится на полосе движения, по которой запланировано движение задействуемого транспортного средства 10, то есть полосе движения, на которую заедет задействуемое транспортное средство 10, или полосе движения, на которую будет выполнен правый поворот, или полосе движения, на которую будет выполнен левый поворот.
[0046] Кроме того, когда управление функционированием задействуемого транспортного средства 10 осуществляется посредством первого режима, и скорость транспортного средства задействуемого транспортного средства 10 больше или равна предписанной скорости, устройство 1 управления вождением не переключает режим автономного вождения во второй режим. В результате устройство 1 управления вождением может переключить режим автономного вождения с первого режима во второй режим только тогда, когда задействуемое транспортное средство 10 движется со скоростью транспортного средства в пределах диапазона, в котором оно может плавно двигаться во втором режиме. То есть, если режим автономного вождения установлен во второй режим, и задействуемое транспортное средство 10 движется с высокой скоростью транспортного средства, которая больше или равна предписанной скорости, то устройству 1 управления вождением или водителю будет трудно немедленно реагировать на внезапные изменения обстоятельств, такие как внезапная остановка впереди идущего транспортного средства 21, так что устройство 1 управления вождением не переключает режим автономного вождения во второй режим. Управления, которое не переключает режим автономного вождения во второй режим, включает в себя управление, которое поддерживает режим автономного вождения в первом режиме, и управление, которое изменяет режим автономного вождения на другой режим, у которого уровень содействия вождению ниже, чем у первого режима.
[0047] Кроме того, первый режим является режимом автономного вождения, который, как упомянуто, требует от водителя визуального наблюдения за окружающими условиями задействуемого транспортного средства 10, а второй режим является режимом автономного вождения, в котором устройство 1 управления вождением выполняет наблюдение за окружающими условиями задействуемого транспортного средства. В результате устройство 1 управления вождением может переключить режим автономного вождения с первого режима во второй режим, тем самым уменьшая обусловленную наблюдением нагрузку на водителя.
[0048] Кроме того, первый режим является режимом с задействованием рук, в котором управление рулевым управлением посредством устройства 1 управления вождением не осуществляется, когда водитель не держит рулевое колесо 14а, а второй режим является режимом без задействования рук, в котором управление рулевым управлением посредством устройства 1 управления вождением осуществляется, даже если руки водителя убраны с рулевого колеса. В результате устройство 1 управления вождением может переключать режим автономного вождения с первого режима во второй режим, тем самым снижая операционную нагрузку на водителя.
[0049] В настоящем варианте осуществления устройство 1 управления вождением может обнаруживать впереди идущее транспортное средство 21 на этапе S3 с Фиг. 2, не выполняя процесса вычисления надежности впереди идущего транспортного средства 21, то есть этапы S4 и S5 по Фиг. 2, а затем перевести управление на этап S6, чтобы таким образом переключить режим автономного вождения во второй режим. Кроме того, если впереди идущее транспортное средство 21 не может быть обнаружено на этапе S3, устройство 1 управления вождением может переключить управление на этап S7 и запретить выполнение процесса переключения режима автономного вождения во второй режим. Кроме того, устройство 1 управления вождением может обнаружить впереди идущее транспортное средство 21 на этапе S3 на Фиг. 2, а затем переключить режим автономного вождения с первого режима во второй режим на этапе S6. То есть процесс может перейти от этапа S1 к этапу S3 без выполнения процесса этапа S2, показанного на Фиг. 2 (пропуск этапа S2). После этого, как описано выше, процесс может перейти к этапу S6 без выполнения процессов этапов S4 и S5. Кроме того, блоку 11 обнаружения впереди идущего транспортного средства устройства 1 управления вождением не обязательно включать в себя блок 11а приема информации истории.
[0050] Кроме того, в настоящем варианте осуществления, после переключения режима автономного вождения из первого режима во второй режим на этапе S6 на Фиг. 2, задействуемое транспортное средство 10 движется позади впереди идущего транспортного средства 21. В этом случае задействуемое транспортное средство 10 может двигаться, следуя за впереди идущим транспортным средством 21, чтобы быть связанным с перемещениями впереди идущего транспортного средства 21, или может просто двигаться по маршруту движения впереди идущего транспортного средства 21, не следуя за впереди идущим транспортным средством 21. Кроме того, верхнее предельное расстояние обнаруживаемого расстояния D от задействуемого транспортного средства 10 до впереди идущего транспортного средства 21, которое может быть обнаружено устройством 1 управления вождением, может совпадать с верхним предельным расстоянием, на котором задействуемое транспортное средство 10 и впереди идущее транспортное средство 21 могут осуществлять связь "транспортное средство - транспортное средство".
[0051] Кроме того, устройство 1 управления вождением может оценивать дорожный просвет других транспортных средств, движущихся перед задействуемым транспортным средством 10, и, когда дорожный просвет другого транспортного средства больше, чем дорожный просвет задействуемого транспортного средства 10, процесс определение того, было ли «обнаружено впереди идущее транспортное средство 21, движущееся перед задействуемым транспортным средством 10» на этапе S3, не выполняется, и управление процессом переходит к этапу S7. То есть, когда дорожный просвет другого транспортного средства, движущегося впереди, больше, чем дорожный просвет задействуемого транспортного средства 10, другое транспортное средство исключается как «впереди идущее транспортное средство 21». Это связано с тем, что когда предполагается наличие упавшего предмета и т.п. в первой полосе 31 движения, даже если этот предмет не может быть препятствием, мешающим движению другого транспортного средства с большим дорожным просветом, он может быть препятствием, которое препятствует движению задействуемого транспортного средства 10 с меньшим дорожным просветом, чем у другого транспортного средства. То есть устройство 1 управления вождением учитывает возможность того, что даже если другое транспортное средство с большим дорожным просветом проехало по маршруту без препятствий, маршрут может быть затруднительным для задействуемого транспортного средства 10 с относительно низким дорожным просветом. Если задействуемое транспортное средство 10 является легковым автомобилем, то другие транспортные средства с большим дорожным просветом, чем у задействуемого транспортного средства 10, являются, например, большими транспортными средствами, такими как грузовики. Задействуемое транспортное средство 10 идентифицирует тип транспортного средства из информации о других транспортных средствах, полученной посредством связи "транспортное средство - транспортное средство" с другим транспортным средством, движущимся впереди, и оценивает дорожный просвет другого транспортного средства на основе типа транспортного средства. Кроме того, задействуемое транспортное средство 10 определяет тип транспортного средства другого транспортного средства по внешней форме или из информации о номерном знаке другого транспортного средства, полученной из изображения другого транспортного средства, движущегося впереди, захваченного передней камерой, и оценивает дорожный просвет другого транспортного средства на основе типа транспортного средства.
[0052] Кроме того, когда определено, что другое транспортное средство, движущееся перед задействуемым транспортным средством 10, является двухколесным транспортным средством, устройство 1 управления вождением может пропустить процесс определения того, было ли «обнаружено впереди идущее транспортное средство 21, движущееся перед задействуемым транспортным средством» на этапе S3, и перейти к этапу S7. То есть, когда другое транспортное средство, движущееся перед задействуемым транспортным средством, является двухколесным транспортным средством, то это другое транспортное средство исключается как «впереди идущее транспортное средство 21». Это связано с тем, что при допущении наличия упавшего предмета и т.п. в первой полосе 31 движения, даже если предмет не может быть препятствием, мешающим движению другого транспортного средства, являющегося двухколесным транспортного средства, в зависимости от размера предмета, он может быть препятствием, мешающим движению задействуемого транспортного средства 10. То есть устройство 1 управления вождением учитывает возможность того, что даже если двухколесное транспортное средство смогло двигаться по маршруту, избегая препятствий, на маршруте может быть препятствие, которое не может быть преодолено задействуемым транспортным средством 10, т.е. четырехколесным транспортным средством. На основе изображения, захваченного камерой, можно определить, является ли другое транспортное средство двухколесным транспортным средством.
[0053] «Второй вариант осуществления»
Второй вариант осуществления будет описан со ссылкой на Фиг. 4-7. Те же ссылочные позиции, что и на Фиг. 1-3, обозначают те же самые или подобные составные элементы или этапы управления, так что избыточные пояснения опущены, и сделана ссылка на описания первого варианта осуществления.
[0054] Процедура способа управления вождением, осуществляемая устройством 1 управления вождением, будет описана со ссылкой на Фиг. 4-7. На Фиг. 5-7 показано задействуемое транспортное средство 10, движущееся в первой полосе 31 движения, первое впереди идущее транспортное средство 41 в качестве впереди идущего транспортного средства, движущегося впереди задействуемого транспортного средства 10, и второе впереди идущее транспортное средство 42, движущееся впереди первого впереди идущего транспортного средства 41. Первым впереди идущим транспортным средством 41 является другое транспортное средство, движущееся в первой полосе 31 движения непосредственно перед задействуемым транспортным средством 10.
[0055] Фиг. 4 является блок-схемой, иллюстрирующей процедуру управления согласно второму варианту осуществления. Как показано на Фиг. 4, устройство 1 управления вождением определяет, обнаружено ли на этапе S3 первое впереди идущее транспортное средство 41, которое является впереди идущим транспортным средством, движущимся в первой полосе 31 движения. Если первое впереди идущее транспортное средство 41 не обнаружено, то управление возвращается к этапу S1, и процессы после этапа S1 выполняются снова. С другой стороны, если обнаружено первое впереди идущее транспортное средство 41, то устройство 1 управления вождением переключает режим автономного вождения с первого режима во второй режим на этапе S6.
[0056] После переключения режима автономного вождения во второй режим на этапе S6 устройство 1 управления вождением определяет, обнаружено ли второе впереди идущее транспортное средство 42 перед первым впереди идущим транспортным средством 41 в первой полосе движения, как показано на Фиг. 5, на этапе S11. Если второе впереди идущее транспортное средство 42 не обнаружено, то управление возвращается к этапу S1, и процессы после этапа S1 выполняются снова.
[0057] На этапе S11, если обнаружено второе впереди идущее транспортное средство 42, то управление переходит к этапу S12, и устройство 1 управления вождением определяет, продолжает ли первое впереди идущее транспортное средство 41 двигаться в первой полосе 31 движения. Если определено, что первое впереди идущее транспортное средство 41 продолжает двигаться в первой полосе 31 движения без смены полосы движения, то управление возвращается к этапу S1, и процессы после этапа S1 повторяются.
[0058] На этапе S11, если определено, что первое впереди идущее транспортное средство 41 не продолжает свое движение в первой полосе 31 движения, то есть, как показано на Фиг. 6 и 7, если определено, что первое впереди идущее транспортное средство 41 сменило полосу движения на вторую полосу 32 движения, которая является другой полосой движения, смежной с первой полосой 31 движения, то управление переходит к этапу S13. На этапе S13 устройство 1 управления вождением определяет, продолжает ли второе впереди идущее транспортное средство 42 двигаться в первой полосе 31 движения.
[0059] Если определено, что второе впереди идущее транспортное средство 42 продолжает двигаться в первой полосе 31 движения без смены полосы на этапе S13, то управление переходит к этапу S14. На этапе S14 устройство 1 управления вождением предписывает задействуемому транспортному средству 10 двигаться позади второго впереди идущего транспортного средства 42. В этом случае, как показано на Фиг. 6, задействуемое транспортное средство 10 сокращает расстояние между транспортными средствами относительно второго впереди идущего транспортного средства 42 до предписанного расстояния и следует за вторым впереди идущим транспортным средством 42. Кроме того, не будучи ограниченным таким образом, задействуемое транспортное средство 10 может двигаться позади второго впереди идущего транспортного средства 42 в первой полосе 31 движения, не следуя за вторым впереди идущим транспортным средством 42, в состоянии, в котором исходное расстояние между транспортными средствами от второго впереди идущего транспортного средства 42 (расстояние между транспортными средствами во время, когда первое впереди идущее транспортное средство 41 меняет полосу движения) сохраняется. То есть задействуемое транспортное средство 10 может следовать за вторым впереди идущим транспортным средством 42, чтобы быть связанным с перемещениями второго впереди идущего транспортного средства 42, или может просто двигаться по маршруту движения второго впереди идущего транспортного средства 42, не следуя за вторым впереди идущим транспортным средством 42.
[0060] Кроме того, на этапе S13, если определено, что второе впереди идущее транспортное средство 42 не продолжает двигаться в первой полосе 31 движения, то есть если определено, что второе впереди идущее транспортное средство 42 сменило полосу движения на вторую полосу 32 движения, то управление переходит к этапу S15. На этапе S15 устройство 1 управления вождением предписывает задействуемому транспортному средству 10 сменить полосу движения на вторую полосу 32 движения, двигаясь позади первого впереди идущего транспортного средства 41, так что задействуемое транспортное средство 10 может сменить полосу движения, следуя за первым впереди идущим транспортным средством 41 и вторым впереди идущим транспортным средством 42. Затем, как показано на Фиг. 7, устройство 1 управления вождением предписывает задействуемому транспортному средству 10 двигаться позади первого впереди идущего транспортного средства 41 на второй полосе 32 движения. В этом случае задействуемое транспортное средство 10 может следовать за первым впереди идущим транспортным средством 41, чтобы быть связанным с перемещениями первого впереди идущего транспортного средства 41, или может просто двигаться по маршруту движения первого впереди идущего транспортного средства 41, не следуя за первым впереди идущим транспортным средством. 41.
[0061] Как описано выше, в устройстве 1 управления вождением и способе управления вождением согласно настоящему варианту осуществления первое впереди идущее транспортное средство 41 и второе впереди идущее транспортное средство 42, движущееся перед первым движущимся впереди транспортным средством 41, обнаруживаются в первой полосе 31 движения, и определяется, продолжают ли первое впереди идущее транспортное средство 41 и второе впереди идущее транспортное средство 42 двигаться в первой полосе 31 движения. Если определено, что первое впереди идущее транспортное средство 41 сменило полосу движения на вторую полосу 32 и что второе впереди идущее транспортное средство 42 продолжает двигаться в первой полосе 31 движения, то устройство 1 управления вождением предписывает задействуемому транспортному средству 10 двигаться позади второго впереди идущего транспортного средства 42 вместо процесса, предписывающего задействуемому транспортному средству 10 двигаться позади первого впереди идущего транспортного средства 41. Даже когда первое впереди идущее транспортное средство 41 сменило полосу движения, если второе впереди идущее транспортное средство 42, которое двигалось перед первым впереди идущим транспортным средством 41, продолжает двигаться по той же самой первой полосе 31 движения, что и задействуемое транспортное средство 10, то устройство 1 управления вождением определяет, что с высокой вероятностью движение можно продолжить в первой полосе 31 движения без столкновения с препятствиями. В результате, даже если первое идущее впереди транспортное средство 41 меняет полосу движения, задействуемое транспортное средство 10 может плавно двигаться позади второго впереди идущего транспортного средства 42, сохраняя при этом режим автономного вождения во втором режиме.
[0062] Кроме того, если определено, что как первое впереди идущее транспортное средство 41, так и второе впереди идущее транспортное средство 42 сменили полосу движения на вторую полосу 32 движения, устройство 1 управления вождением предписывает задействуемому транспортному средству 10 сменить полосу движения на вторую полосу 32 движения, следуя за первым впереди идущим транспортным средством 41 и вторым впереди идущим транспортным средством 42. То есть устройство 1 управления вождением предписывает задействуемому транспортному средству 10 двигаться позади первого впереди идущего транспортного средства 41 и выполнять смену полосы движения на вторую полосу 32 движения. Это связано с тем, что если и первое впереди идущее транспортное средство 41 и второе впереди идущее транспортное средство 42 меняют полосу движения, то существует высокая вероятность того, что впереди в первой полосе 31 движения имеется препятствие или строительная площадка.
[0063] В способе управления вождением, показанном на Фиг. 4, устройство 1 управления вождением может вычислять надежность первого впереди идущего транспортного средства 41 и определять, больше или равна ли надежность первого впереди идущего транспортного средства 41 заданному значению, как указано этапами S4 и S5 на Фиг. 2, между этапом S3 и этапом S6 на Фиг. 4. Кроме того, как указано этапами S12 и S13, соответственно, на Фиг. 4, после обнаружения того, что первое впереди идущее транспортное средство 41 сменило полосу движения и что второе впереди идущее транспортное средство 42 продолжает двигаться в первой полосе 31 движения, устройство 1 управления вождением может вычислить надежность второго впереди идущего транспортного средства 42 и определить, больше или равна ли надежность второго впереди идущего транспортного средства 42 предварительно определенному заданному значению. То есть, если надежность второго впереди идущего транспортного средства 42 меньше заданного значения, устройство 1 управления вождением может понизить режим автономного вождения со второго режима на первый режим.
[0064] Кроме того, в способе управления вождением согласно второму варианту осуществления первое впереди идущее транспортное средство 41 может быть обнаружено на этапе S3 по Фиг. 4, и затем режим автономного вождения может быть переключен с первого режима во второй режим на этапе S6, так же, как и в первом варианте осуществления. То есть этап S2, показанный на Фиг. 4, может быть пропущен.
Описания ссылочных позиций
[0065] 1 Устройство управления вождением
10 Задействуемое транспортное средство
11 Блок обнаружения впереди идущего транспортного средства
11а Блок приема информации истории
12 Устройство обнаружения положения задействуемого транспортного средства
13 База данных карт
14 Бортовые устройства
14а Рулевое колесо
15 Устройство представления
16 Устройство ввода
17 Контроллер вождения
18 Блок управления
21 Впереди идущее транспортное средство
31 Первая полоса движения
32 Вторая полоса движения
41 Первое впереди идущее транспортное средство (впереди идущее транспортное средство)
42 Второе впереди идущее транспортное средство
D Обнаруживаемое расстояние
Группа изобретений относится к устройству управления вождением. Устройство управления вождением содержит блок (18) управления и блок (11) обнаружения впереди идущего транспортного средства. Блок (18) управления выполнен с возможностью управлять функционированием задействуемого транспортного средства (10) с использованием двух режимов автономного вождения, включающих в себя первый режим и второй режим, у которого уровень содействия вождению выше, чем у первого режима. Блок (11) обнаружения выполнен с возможностью обнаруживать впереди идущее транспортное средство (21), движущееся перед задействуемым транспортным средством. Блок (18) управления выполнен с возможностью переключать режим автономного вождения с первого режима во второй режим, когда управление функционированием задействуемого транспортного средства осуществляется с использованием первого режима, и блок обнаружения впереди идущего транспортного средства обнаруживает впереди идущее транспортное средство. Достигается повышение безопасности и надежности смены уровней содействия вождению. 2 н. и 11 з.п. ф-лы, 7 ил.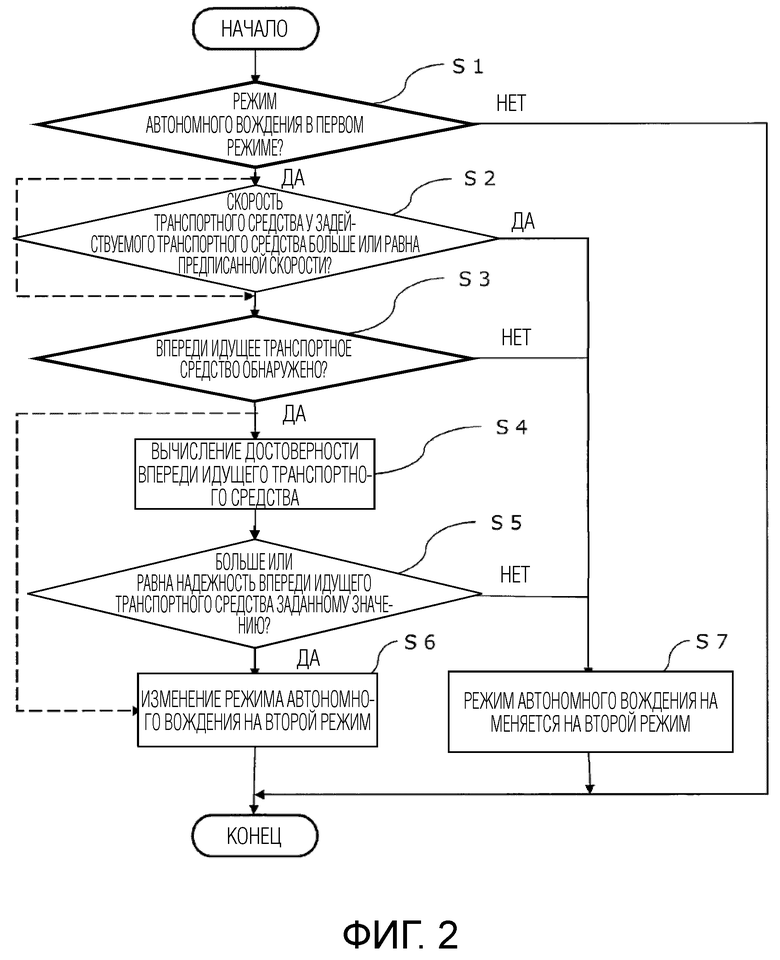
1. Способ управления вождением, в котором управление функционированием задействуемого транспортного средства (10) осуществляется посредством использования устройства (1) управления вождением, имеющего по меньшей мере два режима автономного вождения с разными уровнями содействия вождению, причем эти по меньшей мере два режима автономного вождения включают в себя первый режим и второй режим, у которого уровень содействия вождению выше, чем у первого режима, причем способ содержит этап, на котором:
переключают режим автономного вождения с первого режима во второй режим с использованием устройства (1) управления вождением при обнаружении впереди идущего транспортного средства (21), движущегося перед задействуемым транспортным средством (10), в то время как управление функционированием задействуемого транспортного средства (10) осуществляется посредством первого режима, причем
верхнее предельное расстояние расстояния между задействуемым транспортным средством и впереди идущим транспортным средством для перевода режима автономного вождения из первого режима во второй режим больше, чем верхнее предельное расстояние расстояния между задействуемым транспортным средством и впереди идущим транспортным средством для разрешения выполнения вождения в первом режиме.
2. Способ управления вождением по п.1, дополнительно содержащий этапы, на которых:
вычисляют надежность впереди идущего транспортного средства (21) на основе поведения впереди идущего транспортного средства (21) при обнаружении впереди идущего транспортного средства (21), в то время как управление функционированием задействуемого транспортного средства (10) осуществляется с использованием первого режима, и
посредством устройства управления вождением не переключают режим автономного вождения во второй режим при определении того, что надежность впереди идущего транспортного средства (21) меньше предварительно определенного заданного значения.
3. Способ управления вождением по п.2, в котором устройство управления вождением поддерживает режим автономного вождения в первом режиме при определении надежности впереди идущего транспортного средства (21) меньше упомянутого заданного значения.
4. Способ управления вождением по п.2 или 3, в котором вычисление надежности впереди идущего транспортного средства (21) с использованием устройства управления вождением основано на по меньшей мере одном из следующего: величина поперечного смещения впереди идущего транспортного средства (21), частота ускорения или замедления и частота свечения стоп-сигналов.
5. Способ управления вождением по п.4, в котором верхнее предельное расстояние расстояния возможного следования является расстоянием, на котором задействуемое транспортное средство (10) и впереди идущее транспортное средство (21) могут осуществлять связь "транспортное средство - транспортное средство".
6. Способ управления вождением по любому одному из пп.1-5, в котором устройство управления вождением обнаруживает другое транспортное средство в качестве впереди идущего транспортного средства (21), движущегося перед задействуемым транспортным средством (10), когда принята информация истории движения другого транспортного средства, и информация истории движения, которая принята, включает в себя информацию, указывающую, что другое транспортное средство двигалось в точке перед задействуемым транспортным средством (10) в течение предписанного периода времени.
7. Способ управления вождением по любому одному из пп.1-6, в котором устройство управления вождением не переключает режим автономного вождения во второй режим, когда управление функционированием задействуемого транспортного средства (10) осуществляется с использованием первого режима и скорость задействуемого транспортного средства (10) больше или равна предписанной скорости.
8. Способ управления вождением по любому одному из пп.1-7, в котором
первый режим является режимом автономного вождения, который требует от водителя визуального наблюдения за окружающими условиями задействуемого транспортного средства (10), и
второй режим является режимом автономного вождения, в котором устройство управления вождением выполняет наблюдение за окружающими условиями задействуемого транспортного средства (10).
9. Способ управления вождением по любому одному из пп.1-8, в котором
первый режим является режимом с задействованием рук, в котором рулевое управление посредством устройства управления не функционирует, когда водитель не держит рулевое колесо, и
второй режим является режимом без задействования рук, в котором рулевое управление посредством устройства управления вождением функционирует, даже если руки водителя убраны с рулевого колеса.
10. Способ управления вождением по любому одному из пп.1-9, в котором другое транспортное средство исключается в качестве впереди идущего транспортного средства (21), когда дорожный просвет другого транспортного средства, движущегося перед задействуемым транспортным средством (10), больше дорожного просвета задействуемого транспортного средства (21).
11. Способ управления вождением по любому одному из пп.1-10, в котором другое транспортное средство исключается в качестве впереди идущего транспортного средства (21), когда другое транспортное средство, движущееся перед задействуемым транспортным средством (10), является двухколесным транспортным средством.
12. Способ управления вождением по любому одному из пп.1-11, в котором устройство управления вождением выполнено с возможностью:
переключать режим автономного вождения с первого режима во второй режим, когда первое впереди идущее транспортное средство (41) присутствует в качестве впереди идущего транспортного средства в первой полосе (31) движения, по которой движется задействуемое транспортное средство (10), в то время как управление функционированием задействуемого транспортного средства (10) осуществляется с использованием первого режима,
определять, движутся ли или нет первое впереди идущее транспортное средство (41) и второе впереди идущее транспортное средство (42) в первой полосе (31) движения, при обнаружении того, что второе впереди идущее транспортное средство (42), движущееся перед первым впереди идущим транспортным средством (41), также присутствует в первой полосе (31) движения,
предписывать задействуемому транспортному средству (10) двигаться позади второго впереди идущего транспортного средства (42) при определении того, что первое впереди идущее транспортное средство (41) сменило полосу движения на другую полосу движения, которая отличается от первой полосы (31) движения, и что второе впереди идущее транспортное средство (42) продолжает двигаться в первой полосе движения (31), и
предписывать транспортному средству двигаться позади первого впереди идущего транспортного средства (41) и сменить полосу движения на другую полосу движения при определении того, что первое впереди идущее транспортное средство (41) и второе впереди идущее транспортное средство (42) сменили полосу движения на другую полосу движения.
13. Устройство управления вождением, содержащее:
блок (18) управления, выполненный с возможностью управлять функционированием задействуемого транспортного средства (10) с использованием по меньшей мере двух режимов автономного вождения, включающих в себя первый режим и второй режим, у которого уровень содействия вождению выше, чем у первого режима; и
блок (11) обнаружения впереди идущего транспортного средства, выполненный с возможностью обнаруживать впереди идущее транспортное средство (21), движущееся перед задействуемым транспортным средством, при этом
блок (18) управления выполнен с возможностью переключать режим автономного вождения с первого режима во второй режим, когда управление функционированием задействуемого транспортного средства осуществляется с использованием первого режима, и блок обнаружения впереди идущего транспортного средства обнаруживает впереди идущее транспортное средство,
верхнее предельное расстояние расстояния между задействуемым транспортным средством и впереди идущим транспортным средством для перевода режима автономного вождения из первого режима во второй режим больше, чем верхнее предельное расстояние расстояния между задействуемым транспортным средством и впереди идущим транспортным средством для разрешения выполнения вождения в первом режиме.
| JP 2019125384 A, 25.07.2019 | |||
| WO 2018055773 A1, 29.03.2018 | |||
| JP 2001341548 A, 11.12.2001 | |||
| JP 2019107996 A, 04.07.2019 | |||
| JP 2018039284 A, 15.03.2018 | |||
| JP H11353599 A, 24.12.1999 | |||
| СИСТЕМА УПРАВЛЕНИЯ АВТОМОБИЛЕМ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2012 |
|
RU2575331C2 |

