Изобретение относится к лазерной технике и оптике, а также может быть использовано при измерении дальности до объекта, перемещающегося с высокой скоростью, и его селекции.
Известен способ лазерной локации, основанный на генерации модулированного лазерного излучения, приеме и обработке оптического сигнала, отраженного от подвижного объекта [1]. Данный способ локации позволяет измерять дальность до объекта. При этом информация о доплеровском смещении частоты излучения, по которому можно судить о скорости движения объекта, не используется и в рассматриваемом случае является источником ошибок при измерении дальности.
Известен также способ локации, в основу которого положено использование доплеровского эффекта для пеленгации и измерения радиальной скорости подвижного объекта (движущейся цели) [2]. Несмотря на многие преимущества указанного способа такие, как возможность обеспечения высокой чувствительности, его применение ограничивается, как правило, областью радиолокации. Ввиду затруднений, возникающих при обработке широкополосных сигналов, в лазерной локации данный способ не используется.
Наиболее близким к заявляемому способу является выбранный в качестве прототипа способ измерения дальности до объекта, основанный на измерении интервала времени между моментом излучения зондирующего лазерного импульса и моментом приема излучения, отраженного от объекта, с последующим умножением на скорость распространения света [3].
Недостаток указанного дальномера заключается в наличии погрешности временной фиксации принятого импульса. В зависимости от дальности объекта, состояния локационной трассы и типа цели амплитуда сигнала может меняться на 4-6 порядков. При этом из-за ограничения скорости сигнала в приемном тракте ограничивается точность измерения. Кроме того, сигнал может искажаться шумами и помехами аддитивного и мультипликативного характера. Известный способ не предназначен для измерения дальности высокоскоростных целей, что является его недостатком.
Задачей изобретения является измерения дальности до объекта, двигающегося с повышенной скоростью, улучшение помехозащищенности способа.
Указанная задача решается за счет того, что в способе обработки зондирующего сигнала, основанном на измерении интервала времени между излученным и принятым импульсами, осуществляют вычисление корреляционной функции сигнала принятого от объекта, двигающегося с повышенной скоростью, используя опорный сигнал, записанный при передаче зондирующего сигнала, преобразованного для записи в импульсный сигнал, предварительно перед указанным вычислением осуществляют фильтрацию принятого и записанного сигналов узкополосыми фильтрами, выполняют мультипликативное преобразование частотного спектра сигналов, при этом измеренное расстояние определяют по положению максимума корреляционной функции на временной оси, в качестве зондирующего сигнала используют импульсный сигнал с переменным периодом следования импульсов.
Техническим результатом изобретения является измерение расстояния до объекта, двигающегося с повышенной скоростью, а также повышение помехозащищенности способа измерения дальности.
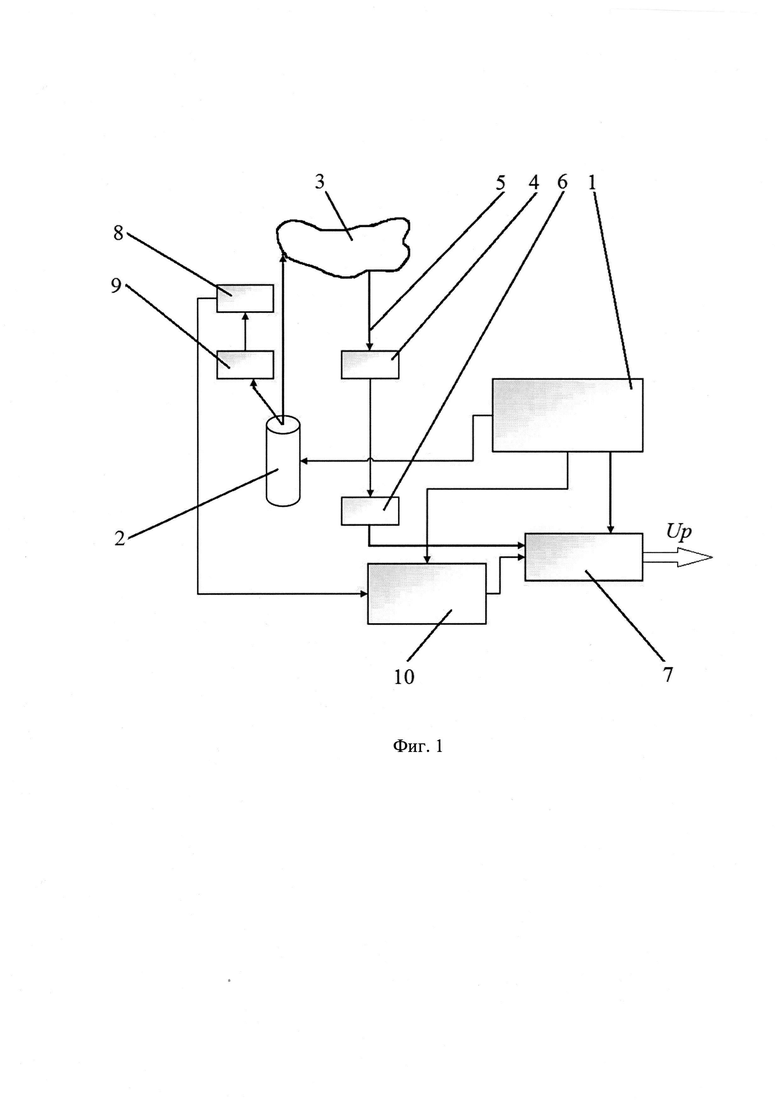
Сущность изобретения рассматривается на примере генерации и обработки зондирующего сигнала при измерении дальности до подвижного объекта и поясняется чертежом, представленным на фиг. 1, где изображена упрощенная схема формирования, фильтрации опорного и зондирующего сигналов, а также обработки сигнала, отраженного от объекта.
Согласно чертежу схема содержит управляющее устройство 1, к которому подключен излучатель 2 лазерного сигнала, генерирующий луч в направлении на объект 3, узкополосный фильтр 4, связывающий посредством передачи излучения 5 объект 3 с фотоприемником 6, подключенным к входу вычислителя 7, другой вход которого соединен с дополнительным фотоприемником 8, который связан с излучателем 2 через узкополосный фильтр 9. Управляющее устройство 1 подключено к преобразователю 10 частотного спектра сигнала и к вычислителю 7. Через  обозначен выход вычислителя 7.
обозначен выход вычислителя 7.
Генерацию и обработку зондирующего сигнала осуществляют следующим образом.
По сигналу управляющего устройства 1 включают излучатель 2, на который подается импульсный сигнал с управляющего устройства 1. Излучатель 2 начинает генерировать лазерные колебания, которые распространяются в пространстве и достигают зондирующего объекта 3. Отраженный от объекта оптический сигнал 5 возвращается через узкополосый фильтр 4 на фотоприемник 6, где происходит преобразование электромагнитных колебаний в электрические. Параллельно лазерные колебания излучателя 2 подают на дополнительный фотоприемник 8 через узкополосый фильтр 9. С помощью фотоприемника 8 формируют опорный сигнал. После усиления электрический сигнал, снимаемый с дополнительного фотоприемника 8, подают на преобразователь 10 частотного спектра сигнала для мультипликативного сдвига частоты с целью компенсации смещения частоты, возникающего у отраженного сигнала при движении объекта 3. Как известно, вычисление корреляционной функции возможно при равных частотах коррелируемых сигналов [4]. После мультипликативного сдвига частоты в соответствии с радиальной скоростью объекта опорный электрический сигнал подается на один из входов вычислителя 7, на другой вход которого подается электрический сигнал, снимаемый с фотоприемника 6, несущий информацию об удаленности объекта. По сигналу управляющего устройства 1 происходит вычисление взаимной корреляционной функции названных сигналов. По положению импульса, соответствующего максимальному значению корреляционной функции на временной оси, определяют отрезок времени, затраченный на прохождение лазерного луча до объекта 3 и обратно. По значению временного отрезка вычисляют, зная скорость света, расстояние до объекта 3. Информацию снимают с выхода  вычислителя 7. Возможно определение величины мультипликативного сдвига частоты опорного электрического сигнала по значению радиальной скорости объекта, как это делают в [4]. Скорость объекта 3 известна заранее.
вычислителя 7. Возможно определение величины мультипликативного сдвига частоты опорного электрического сигнала по значению радиальной скорости объекта, как это делают в [4]. Скорость объекта 3 известна заранее.
Исследования, в частности, моделирование показали, что точность измерения расстояния может зависеть от ширины полосы сигнала (в данном случае импульсного сигнала, используемого для модуляции оптического излучения). Результаты исследования полностью согласуются с материалом, изложенным в [5]. Непосредственной связи точности измерения со скоростью объекта в вычислении дальности нет.
Описанная выше совокупность признаков предлагаемого способа обеспечивает решение поставленной задачи, позволяет реализовать возможность измерения расстояния до цели в условиях высокой скорости объекта, независимо от фоновой обстановки.
Как показали предварительные расчеты, а также моделирование процесса преобразования сигналов, предлагаемый способ позволяет достичь высокой точности в измерении расстояния до целей, в том числе и двигающихся с повышенной скоростью.
Благодаря значительной эффективности и сравнительной простоте реализации, способ может найти широкое практическое применение.
Источники информации, использованные при составлении описания и формулы изобретения.
[1] Петровский В.И., Пожидаев О.А. Локаторы на лазерах. - М.: Воениздат, 1969. - С. 54-81.
[2] Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. - М.: Сов. радио, 1975. - С. 84-85.
[3] Вильнер В, Ларюшкин А, Рудь Е. Методы повышения точности импульсных лазерных дальномеров // - Электроника: Наука, Технология, Бизнес.2008, №3. с. 118-119 (прототип).
[4] Пат. 2302077 Российская Федерация МПК Н04В 1/04. Способ обработки сигнала / А.Б. Атнашев, В.Б. Атнашев. №2004139135: заявл. 23.12.2007, Бюл. №18.
[5] Лезин Ю.С. Введение в теорию и технику радиотехнических систем / - М: Радио и связь, 1986. - С. 100-103.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ локационного измерения дальности | 2021 |
|
RU2766065C1 |
| Лазерный дальномер | 2021 |
|
RU2756381C1 |
| Импульсный лазерный дальномер | 2021 |
|
RU2756783C1 |
| Лазерный дальномер с пробным излучателем | 2021 |
|
RU2756782C1 |
| СПОСОБ ЛАЗЕРНОГО ДАЛЬНОМЕТРИРОВАНИЯ | 2013 |
|
RU2538432C1 |
| Лазерный дальномер | 2017 |
|
RU2650851C1 |
| ПРИЕМНИК ИМПУЛЬСНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2511069C1 |
| ПРИЕМНИК ИМПУЛЬСНЫХ ОПТИЧЕСКИХ СИГНАЛОВ | 2012 |
|
RU2506547C1 |
| Способ формирования и обработки зондирующего лазерного сигнала | 2015 |
|
RU2616933C2 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ В ЛАЗЕРНОМ КОГЕРЕНТНОМ ЛОКАТОРЕ С МАТРИЧНЫМ ФОТОПРИЕМНИКОМ | 2007 |
|
RU2354994C1 |
Использование: изобретение относится к лазерной технике и может быть использовано при измерении дальности до быстро перемещающихся объектов. Сущность: в способе, основанном на измерении интервала времени между излученным и принятым импульсами лазерного дальномера, преобразованными в радиосигнал, осуществляют вычисление корреляционной функции принятого зондирующего сигнала, используя опорный сигнал, записанный при передаче зондирующего сигнала, преобразованного для записи в импульсный сигнал, предварительно перед указанным вычислением осуществляют фильтрацию принятого и записанного сигналов, для компенсации доплеровского сдвига частоты выполняют мультипликативное преобразование частотного спектра сигналов, при этом измеренное расстояние определяют по положению максимума корреляционной функции на временной оси. В качестве зондирующего сигнала лазерного дальномера используют импульсный сигнал с переменным периодом следования импульсов или с переменной длительностью следования импульсов. Технический результат: увеличение диапазона измерения скорости объекта при измерении расстояния до объекта с помощью лазерного дальномера. 1 ил.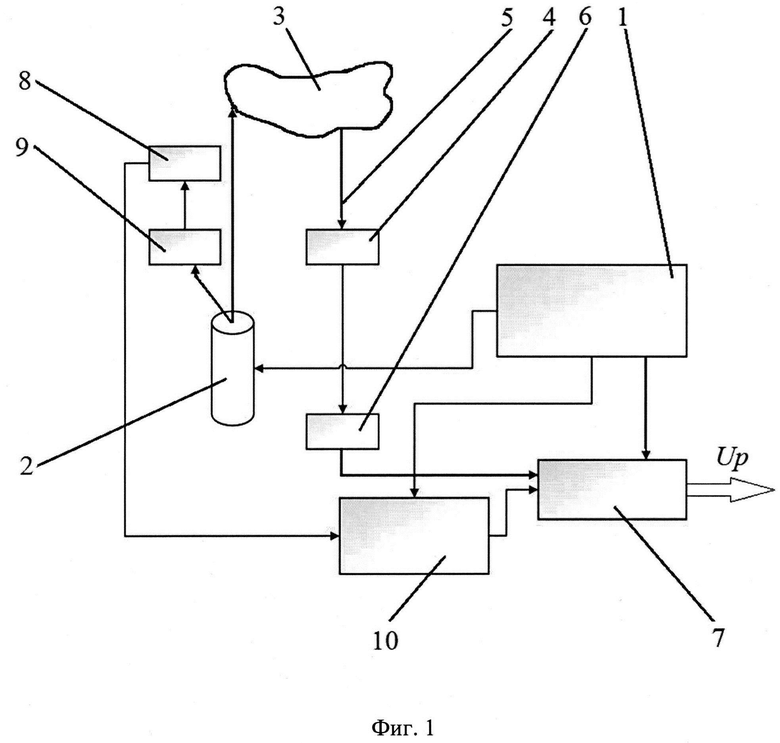
Способ измерения дальности с помощью лазерного дальномера, основанный на измерении интервала времени между излученным и принятым импульсами, отличающийся тем, что осуществляют преобразование импульсов в радиосигнал, вычисляют корреляционную функцию принятого сигнала, отраженного от объекта, двигающегося с высокой скоростью, используя опорный сигнал, записанный при передаче зондирующего сигнала, перед указанным вычислением осуществляют фильтрацию принятого и записанного сигналов узкополосными фильтрами, выполняют мультипликативное преобразование частотного спектра сигналов, при этом измеренное расстояние определяют по положению максимума корреляционной функции на временной оси, при этом в качестве зондирующего сигнала используют импульсный сигнал с переменным периодом следования импульсов или с переменной длительностью следования импульсов.
| US 20210325515 A1, 21.10.2021 | |||
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2302077C2 |
| US 20210072382 A1, 11.03.2021 | |||
| US 20210055392 A1, 25.02.2021 | |||
| US 4413905 A1, 08.11.1983 | |||
| CN 113917485 A, 11.01.2022. | |||
