Изобретение относится к лазерной технике и может быть использовано при измерении дальности и оптической локации подвижных объектов.
Известен способ лазерной локации, основанный на генерации модулированного лазерного излучения, приеме и обработке оптического сигнала, отраженного от подвижного объекта [1]. Чтобы обеспечить возможность точного определения дальности, лазерное излучение модулируют по синусоидальному закону. Дальность до объекта определяют путем измерения относительного фазового сдвига сигнала, выделенного после детектирования отраженного излучения, и модулирующего сигнала. Для исключения неоднозначности в измерении дальности до объекта излучение модулируют сигналами различной частотой. Это усложняет процесс формирования и обработки сигнала, затрудняет реализацию способа.
Известен также способ формирования и обработки зондирующего лазерного сигнала, используемый при измерении дальности, основанный на генерации лазерного импульса, приеме, усилении принятого оптического сигнала, детектировании и определении положения принятого импульса на временной оси [2]. Процесс измерения осуществляется по одиночному импульсу. Поэтому указанный способ имеет сравнительно низкую чувствительность и недостаточную помехозащищенность.
Наиболее близким к заявляемому способу является выбранный в качестве прототипа способ исследования среды, основанный на формировании и обработке зондирующего сигнала, осуществляемый путем генерации последовательности неэквидистантных импульсов с последующей оптимальной обработкой принятой последовательности [3].
В результате детектирования оптического сигнала электрический сигнал, снимаемый с фотоприемника (ФП), имеет одну полярность. Как известно, наиболее перспективной является обработка сигнала путем вычисления взаимной корреляционной функции (ВКФ) принятого сигнала и опорного сигнала. Опорный сигнал в известном способе формируют в виде копии излучаемого сигнала. При использовании данного способа в лазерной локации сигнал, полученный в результате вычисления ВКФ, также будет однополярным, что затрудняет обнаружение максимального значения функции на фоне шума как имеющего одинаковую с шумом полярность. По названной причине указанный способ не позволяет в данном случае реализовать потенциальные преимущества обработки сигнала путем вычисление ВКФ, вследствие чего не достигается соответствующая чувствительность и помехозащищенность оптической системы, реализующей указанный способ.
Задачей изобретения является повышение чувствительность и помехозащищенность системы, используемой для измерения дальности и оптической локации подвижных объектов.
Поставленная задача решается тем, что в способе формирования и обработки зондирующего лазерного сигнала, основанном на генерации неэквидистантных импульсов лазерного излучения, оптимальной фильтрации принятого сигнала, осуществляют вычисление взаимной корреляционной функции принятого сигнала и опорного сигнала, который формируют в виде суммы смещенных одна относительно другой на временной оси последовательностей разнополярных импульсов, идентичных последовательности излучаемых импульсов, по уровню сигнала, полученного в результате вычисления взаимной корреляционной функции, принимают решение об обнаружении объекта в исследуемом пространстве, по максимальной разнице соседних значений взаимной корреляционной функции определяют максимальное значение функции, по временной задержке которого вычисляют дальность до объекта, при этом, формируя опорный сигнал, задают относительное смещение последовательностям, равное значению длительности импульса.
Техническим результатом изобретения является повышение чувствительности и помехозащищенности оптической системы измерения дальности и локации подвижных объектов.
Сущность изобретения поясняется на примере реализации способа обработки зондирующего лазерного сигнала при локации и измерения дальности подвижной цели.
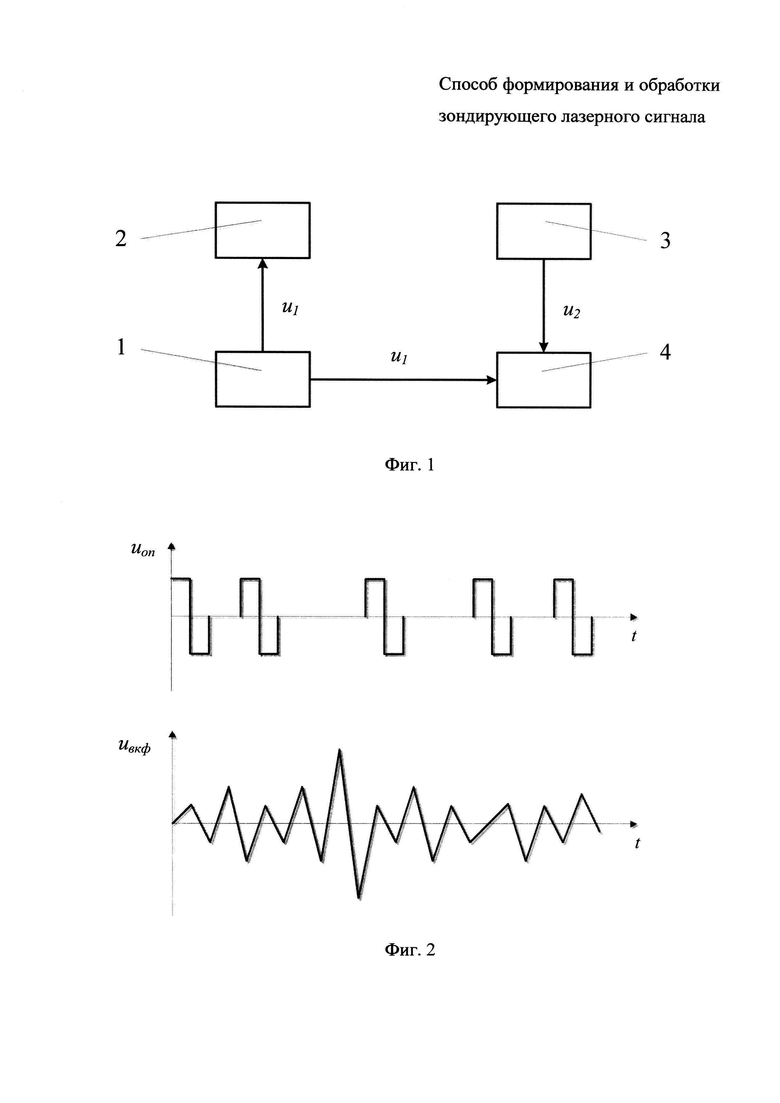
Схема, поясняющая предлагаемый способ обработки зондирующего лазерного сигнала, представлена на фиг. 1. На фиг. 2 представлены графики опорного сигнала и ВКФ принятого и опорного сигналов.
Согласно фиг. 1, устройство для осуществления способа содержит блок 1 формирования сигнала, соединенный с модулятором 2 лазерного сигнала, приемник 3 лазерного излучения, связанный с блоком 4 обработки сигнала, который подключен к блоку 1 формирования сигнала. На данном чертеже также обозначены модулирующий сигнал u1, формируемый в блоке 1, и сигнал u2, снимаемый с ФП приемника 3 лазерного излучения. На фиг. 2 вверху изображен график опорного сигнала и ниже - график ВКФ. По вертикальной оси первого графика отложен уровень опорного сигнала uon, по вертикальной оси второго графика отложен уровень ВКФ uВКФ. По горизонтальным осям графиков отложено время t.
Локацию цели и измерение дальности до цели осуществляют следующим образом.
В соответствии с чертежом, приведенным на фиг. 1, используя блок 1, формируют, как это делается в прототипе, сигнал, представляющий собой последовательность неэквидистантных импульсов. Используются импульсы одной полярности, например положительной. Названный сигнал u1 подают на модулятор 2 передатчика лазерного излучения. Излучаемый лазерный сигнал после отражения от цели принимают посредством лазерного приемника 3, где осуществляют демодуляцию сигнала, и после усиления сигнал u2 с выхода приемника 3 подают на вход блока 4. Одновременно вышеназванную последовательность неэквидистантных импульсов подают с выхода блока 1 на блок 4, где формируют опорный сигнал. Названную последовательность импульсов суммируют с последовательностью, расположение импульсов у которой идентично вышеуказанной, но импульсы имеют обратную полярность (в данном случае отрицательную). При этом вторую из названных последовательностей смещают на временной оси и получают uon, как это показано на верхнем графике на фиг. 2.
Вычисляют ВКФ демодулированного сигнала u2 и сформированного выше описанным образом опорного сигнала uon. Сигнал u2, полученный путем преобразования оптического излучения на ФП в электрический сигнал, является однополярным сигналом. В результате корреляционной свертки с положительной компонентой опорного сигнала возникает положительная составляющая ВКФ и соответственно при свертке с отрицательной - отрицательная. На выходе блока 4 в итоге будет биполярный сигнал uВКФ, как это показано на нижнем графике на фиг. 2. Оптимальное смещение последовательностей при формирования опорного сигнала задают таким, чтобы наилучшим образом выделить полезный сигнал на фоне шума. В рассматриваемом примере реализации способа указанное смещение приблизительно равно длительности импульса. После вычисления ВКФ принятого сигнала и названного опорного сигнала по максимальной разнице соседних значений взаимной корреляционной функции определяют максимальное значение функции. По уровню полученного сигнала принимают решение об обнаружении объекта в исследуемом пространстве, по временной задержке сигнала вычисляют дальность до цели.
Описанная выше совокупность признаков предлагаемого способа обеспечивает решение поставленной задачи. За счет применения корреляционной обработки сигнала повышаются чувствительность и помехозащищенность системы.
Благодаря высокой эффективности и сравнительной простоте реализации способ может найти широкое практическое применение.
Источники информации
1. Петровский В.И., Пожидаев О.А. Локаторы на лазерах. - М.: Воениздат, 1969, с. 54-81.
2. Лебедько Е. Г. Системы оптической локации, ч. 3. Учебное пособие. - СПб: НИУ ИТМО, 1013, с. 27-29.
3. Патент РФ №2269141, МПК G01S 13/08. Способ исследования среды / №2003126433. Заявлено 22.08.2003. Опублик. 27.01.2006; Бюл. №03, (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ С ПОМОЩЬЮ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2022 |
|
RU2797148C1 |
| СПОСОБ ПАССИВНОЙ ЛОКАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2564995C1 |
| СПОСОБ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2574079C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И СЕЛЕКЦИИ ПОДВИЖНОЙ ЦЕЛИ | 2013 |
|
RU2552537C2 |
| СПОСОБ И ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2015 |
|
RU2605628C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2016 |
|
RU2626973C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПРЯМОЛИНЕЙНО ЛЕТЯЩЕЙ ЦЕЛИ ПРИ МНОГОЧАСТОТНОМ УЗКОПОЛОСНОМ ЗОНДИРОВАНИИ | 1995 |
|
RU2099743C1 |
| КОРРЕЛЯЦИОННО-БАЗОВАЯ СИСТЕМА ЛОКАЦИИ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2674265C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2017 |
|
RU2653558C9 |
Способ формирования и обработки зондирующего лазерного сигнала основан на генерации неэквидистантных импульсов лазерного излучения, фильтрации принятого сигнала, вычисления взаимной корреляционной функции принятого сигнала и опорного сигнала. Опорный сигнал формируют в виде суммы смещенных одна относительно другой на временной оси последовательностей разнополярных импульсов. По уровню сигнала, полученного в результате вычисления взаимной корреляционной функции, принимают решение об обнаружении объекта в исследуемом пространстве. По максимальной разнице соседних значений взаимной корреляционной функции, определяют максимальное значение функции, по временной задержке которого вычисляют дальность до объекта, при этом, формируя опорный сигнал, задают относительное смещение последовательностям, равное значению длительности импульса. Технический результат - повышение чувствительности и помехозащищенности оптической системы измерения дальности и локации подвижных объектов. 1 з.п. ф-лы, 2 ил.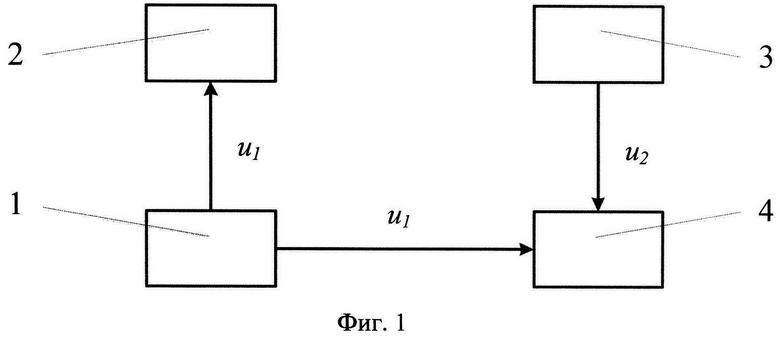
1. Способ формирования и обработки зондирующего лазерного сигнала, основанный на генерации неэквидистантных импульсов лазерного излучения, оптимальной фильтрации принятого сигнала, отличающийся тем, что оптимальную фильтрацию принятого сигнала осуществляют путем вычисления взаимной корреляционной функции названного сигнала и опорного сигнала, который формируют в виде суммы смещенных одна относительно другой на временной оси последовательностей разнополярных импульсов, идентичных последовательности излучаемых импульсов, по максимальной разнице соседних значений сигнала, полученного в результате вычисления взаимной корреляционной функции, принимают решение об обнаружении объекта в исследуемом пространстве, по временной задержке данного сигнала определяют дальность до объекта.
2. Способ по п. 1, отличающийся тем, что, формируя опорный сигнал, задают относительное смещение последовательностям, равное значению длительности импульса.
| JP H 05264729 A 12.10.1993 | |||
| СПОСОБ ИССЛЕДОВАНИЯ СРЕДЫ | 2003 |
|
RU2269141C2 |
| ЛАЗЕРНЫЙ ЛОКАТОР | 2011 |
|
RU2456636C1 |
| JP 2006322847 A 30.11.2006. | |||

