ОБЛАСТЬ ТЕХНИКИ
Технология и цель настоящего изобретения находятся в области электронных систем защиты и сигнализации и содержат элементы, непосредственно связанные с метрологией, технологией датчиков, аналоговой и цифровой электроникой, а также системной инженерией.
УРОВЕНЬ ТЕХНИКИ
Развитие электроники проходит все более ускоряющимися темпами, в последнее время появилось большое число электрических, электронных и электромеханических элементов для контроля и защиты автомобилей, и в настоящее время все выпускаемые промышленностью автомобили снабжены центральным компьютером, который выполняет все операции, связанные с данным транспортным средством. А благодаря широкому распространению различных типов электронных элементов изготовители транспортных средств могут оборудовать их различными системами сигнализации, в частности, системами, которые служат для предотвращения краж транспортных средств, однако практически ничего не сделано для защиты припаркованных транспортных средств от возможных столкновений с другими транспортными средствами, приближающимися к месту их парковки, хотя в подобных ситуациях имеется серьезная опасность столкновения припаркованного транспортного средства с другими транспортными средствами, выполняющими маневры при парковке. Несколько лет назад этот же автор подал патентную заявку с целью обеспечения припаркованных транспортных средств некоторым типом защиты, однако она была основана на использовании внешних устройств, установленных на исходном транспортном средстве, и в качестве ссылки можно привести заявку с номером публикации МХ/а/2012/008184.
Фактически, до настоящего времени, для решения этой проблемы было сделано мало или практически ничего, хотя повреждения, нанесенные корпусам и бамперам припаркованных автомобилей, во многих случаях приводят к довольно дорогостоящим ремонтам, и, что особенно неприятно в подобных ситуациях, практически никогда нельзя найти ответственного за нанесенный ущерб. Поэтому настоящее изобретение направлено на устранение всех этих недостатков с использованием уже имеющихся элементов, установленных на исходном транспортном средстве.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Способ, являющийся предметом настоящего изобретения, заключается в использовании электронной инфраструктуры, которой оснащены современные автомобили, в частности, речь идет об ультразвуковых датчиках на бампере или электронных камерах. При реализации данного метода используется набор виртуальных электронных устройств, которые создаются в процессе программирования центрального компьютера транспортного средства, с помощью которого в большинстве случаев можно сконфигурировать определенные активные элементы, такие как цифровые элементы и электронные схемы, обычно именуемые программируемой логикой элементов и, одновременно, использовать аналоговые электронные элементы, доступные тому же центральному компьютеру, для сборки усилителей, детекторов, виртуальных датчиков и анализаторов, которые все вместе, находясь под управлением и в организационной структуре одного центрального компьютера могут обеспечить транспортное средство сигнализацией, предупреждающей другие транспортные средства при выполнении маневров в непосредственной близости от них, если расстояние до них, величины скоростей и ускорений представляют такую опасность, что столкновение транспортных средств неизбежно и, при необходимости, именно звуковая и световая сигнализация припаркованного автомобиля предупреждает водителя приближающегося транспортного средства об опасности маневра.
При отсутствии ультразвуковых датчиков на переднем и заднем бамперах транспортного средства предлагается способ использования камер, которые в целях защиты размещаются на переднем и заднем частях транспортного средства и при использовании данного способа эти камеры преобразуются в датчики расстояния, скорости и ускорения; если же автомобиль уже оснащен камерами, то они используются и включаются в систему защиты.
Использование камер обеспечивает дополнительное преимущество, позволяя фотографировать табличку с номером транспортного средства в тех случаях, когда это необходимо; фотография соответствующей номерной таблички может быть впоследствии получена или интегрирована в сеть Интернета вещей (IoT) через центральный компьютер.
ОПИСАНИЕ ФИГУР
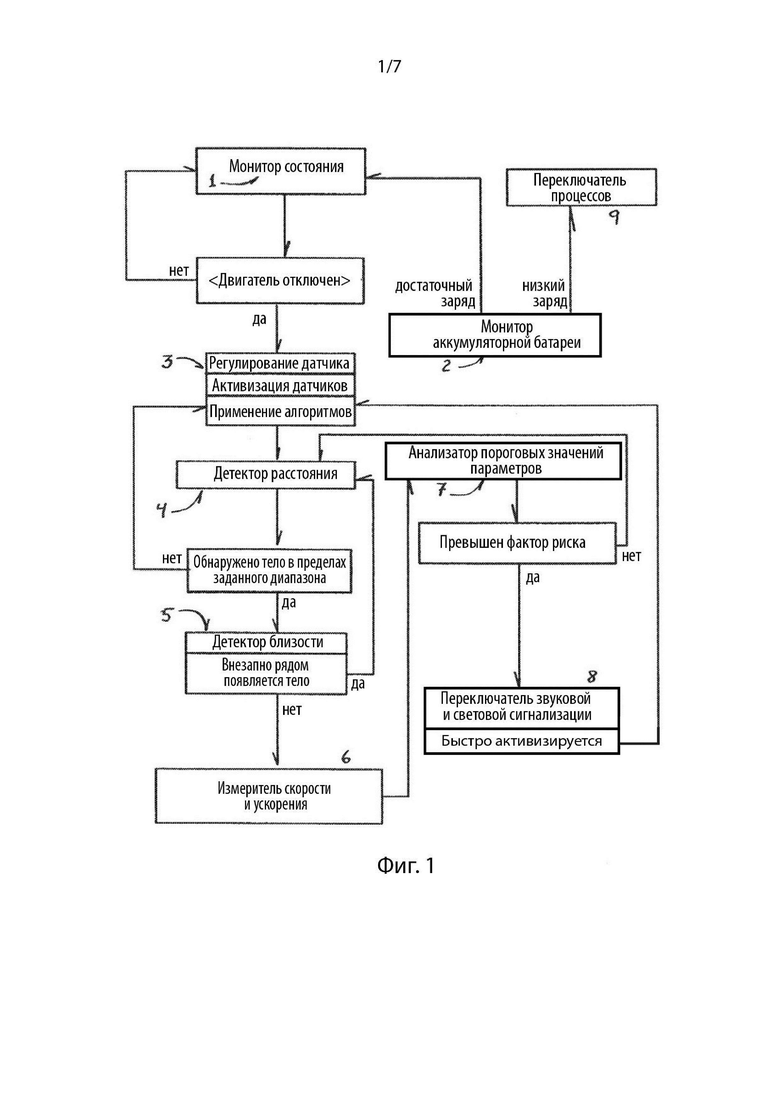
На Фиг. 1 проиллюстрированы необходимые реальные виртуальные устройства и их интеграция в способ и систему для оснащения транспортного средства противоударной сигнализацией для припаркованного транспортного средства.
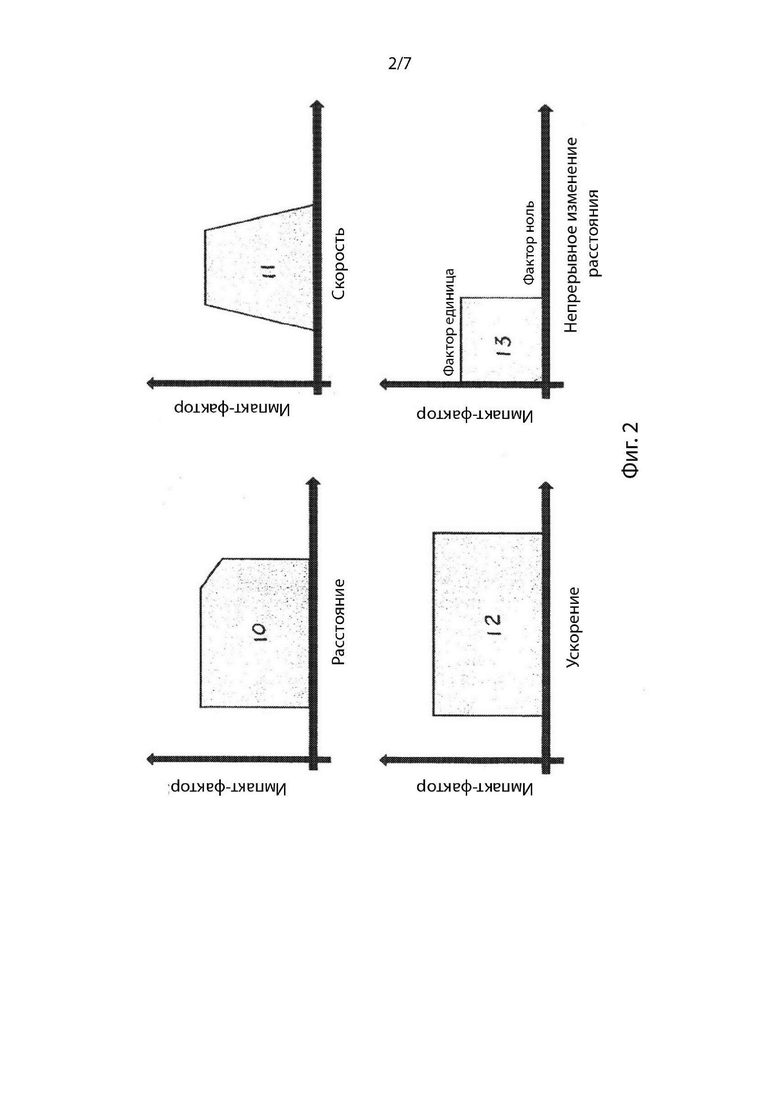
На Фиг. 2 проиллюстрированы импакт-факторы величин для расстояния, скорости, ускорения и мгновенных изменений расстояния, которые служат параметрами формулы, определяющей различные варианты возможных действий, которые должны выполняться на основе расчетов.
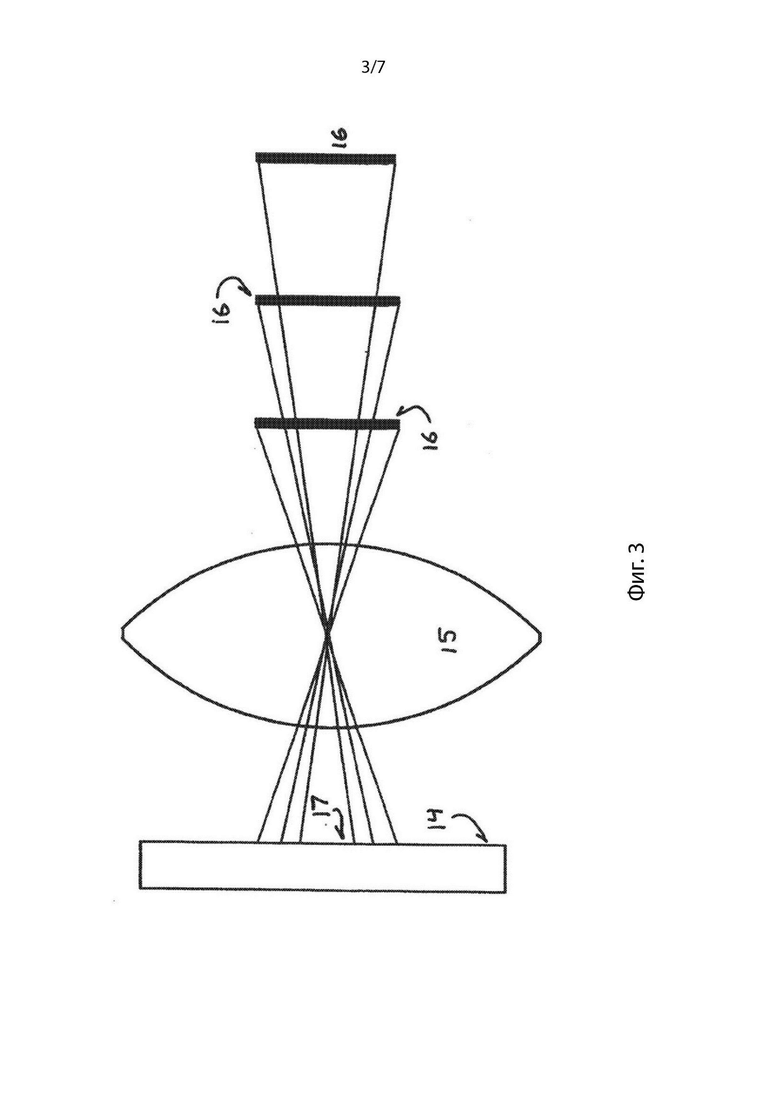
На Фиг. 3 проиллюстрировано, каким образом камера используется для определения расстояния до того же самого объекта.
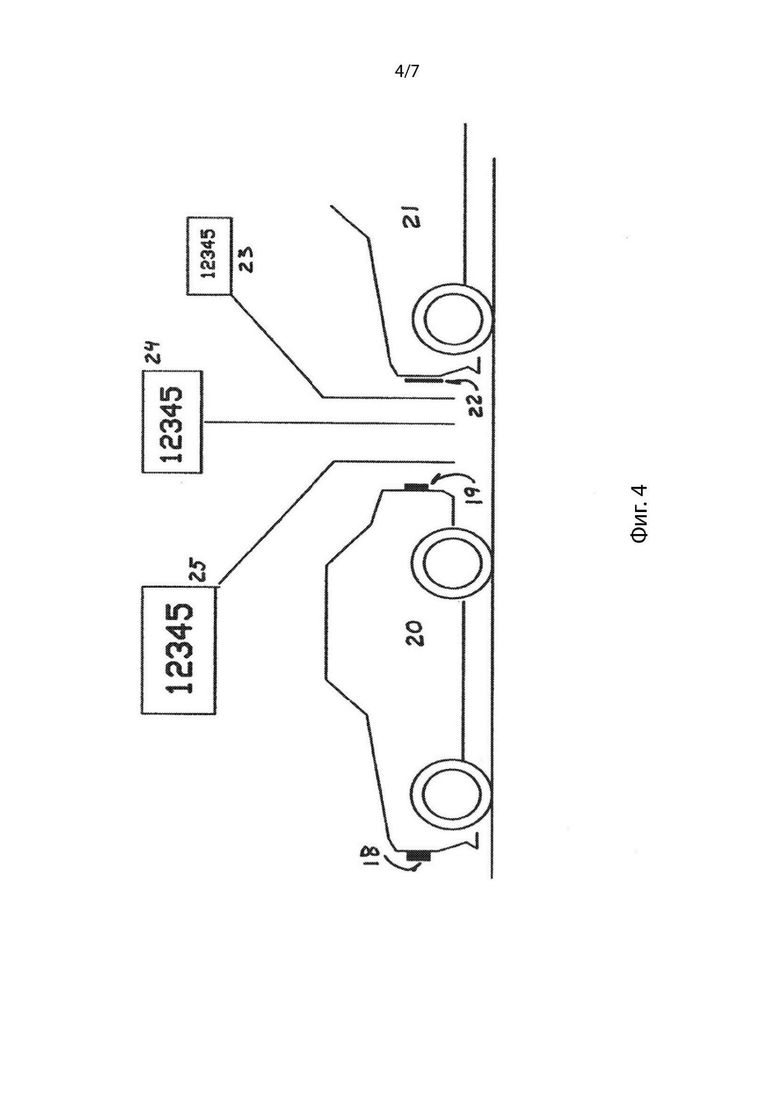
На Фиг. 4 проиллюстрировано, каким образом камера используется для отслеживания номерных знаков приближающегося транспортного средства и, тем самым, для установления величин относительной скорости и расстояния до автомобиля.
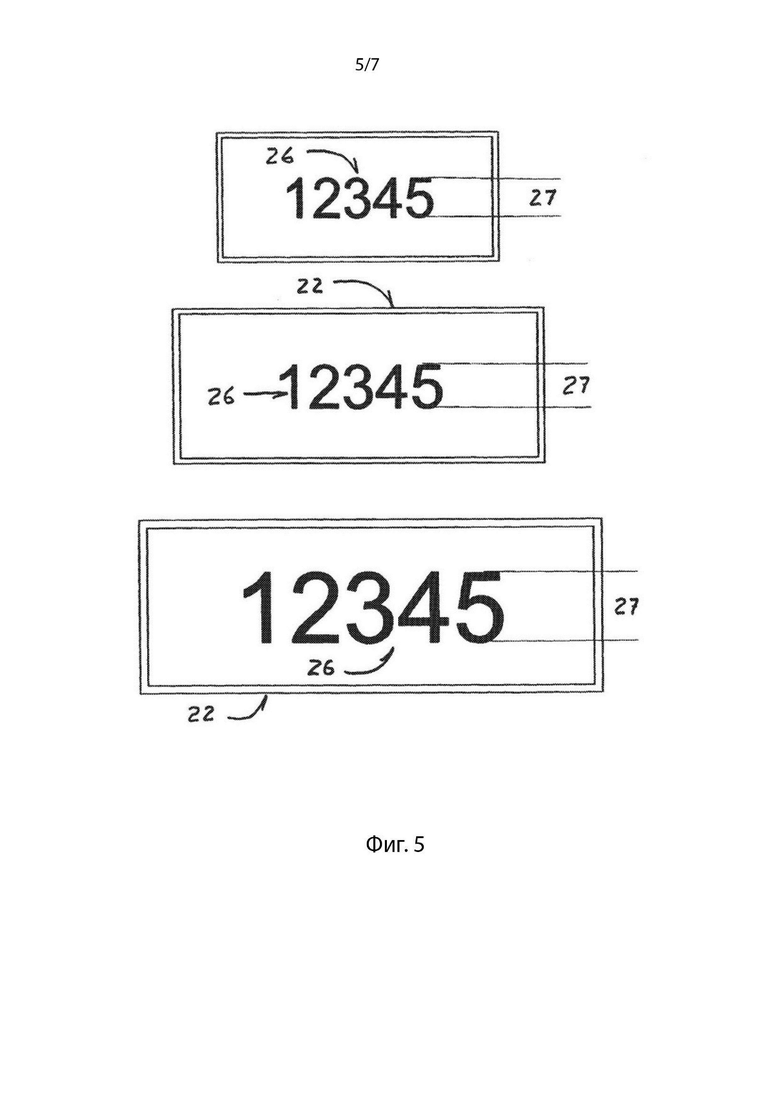
На Фиг. 5 проиллюстрировано, каким образом камера фиксирует размеры номерного знака автомобиля на различных расстояниях.
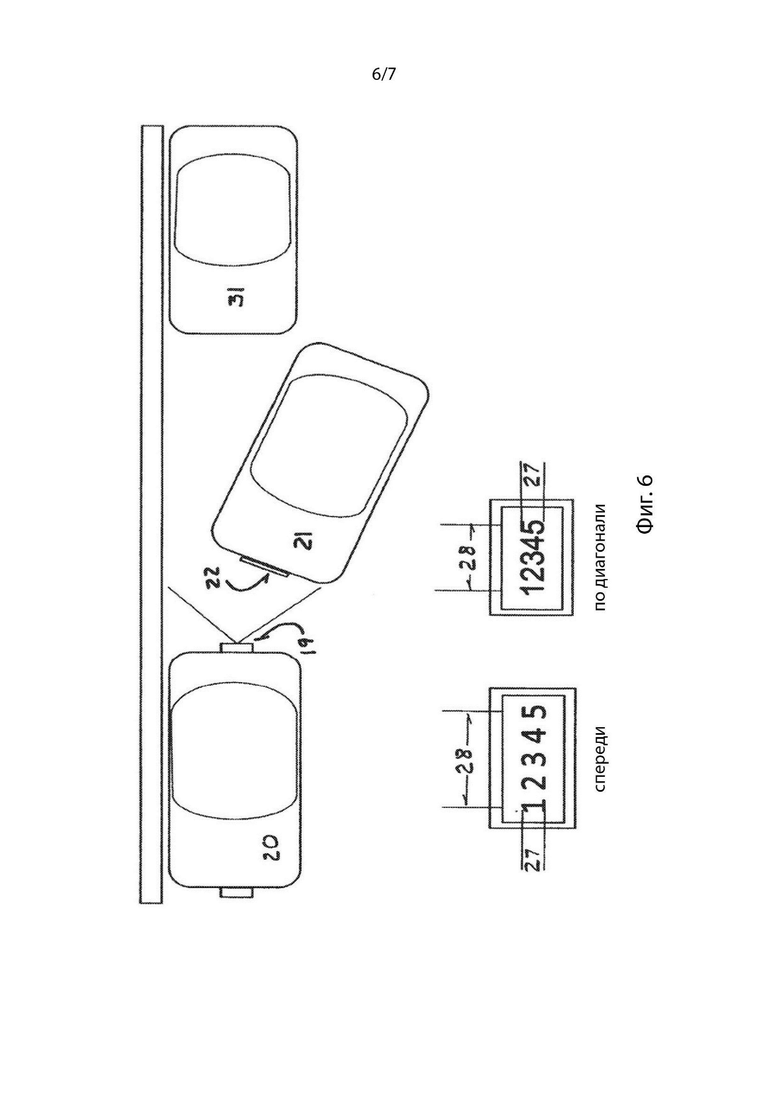
На Фиг. 6 проиллюстрировано, что угол приближения автомобиля к стоянке не может повлиять на определение расстояния между приближающимися и припаркованными транспортными средствами.
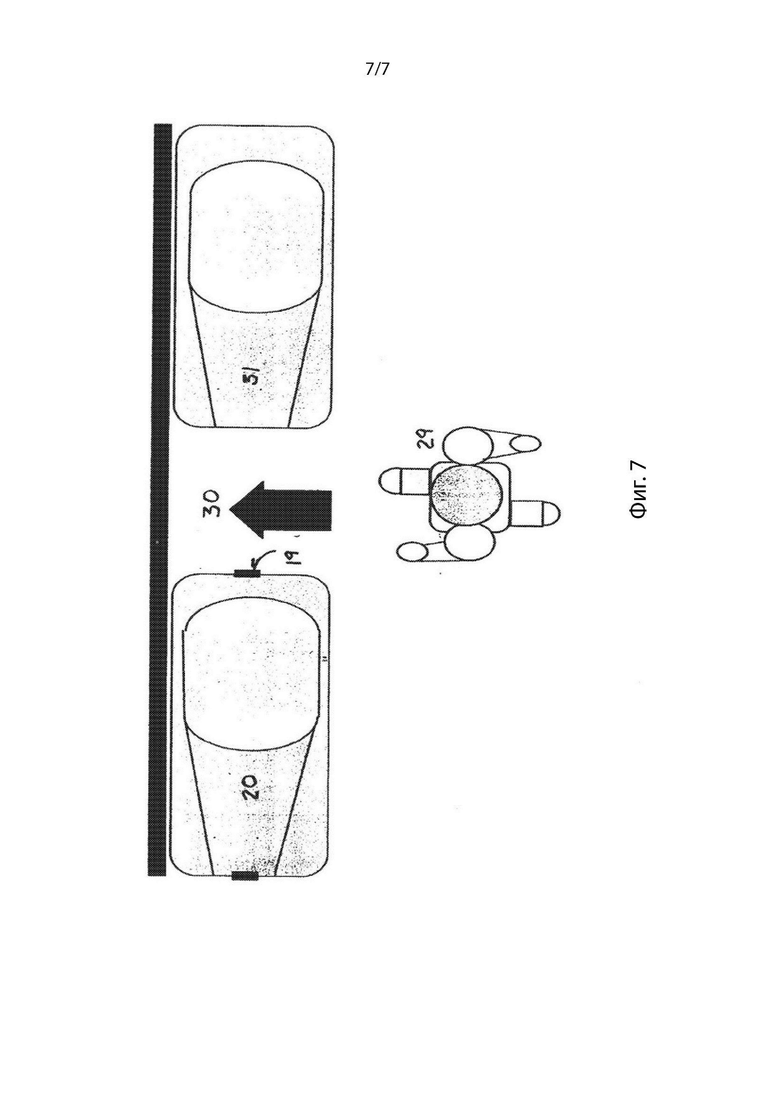
На Фиг. 7 проиллюстрировано, как пешеход пересекает территорию между двумя припаркованными автомобилями.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Объектом способа настоящего изобретения является использование центрального компьютера транспортного средства и различных электронных схем, всего исходного оборудования транспортного средства, для создания виртуальных устройств на основе использования программируемых логических элементов, использования усилительных цепей, компараторов, аттенюаторов и других аналоговых элементов, доступных центральному компьютеру, для создания системы сигнализации, которая предупреждает водителя приближающегося транспортного средства, когда выполняемые имманевры по сближению могут привести к столкновению с охраняемым припаркованным транспортным средством, при этом создается звуковая и световая сигнализация защищенного транспортного средства для предотвращения возможного столкновения и повреждения припаркованного автомобиля. Данный способ предусматривает использование ультразвуковых датчиков, которые находятся на обоих бамперах некоторых транспортных средств, или электронных камер, которые либо являются частью исходного транспортного средства, либо стационарно устанавливаются на нем, для определения скорости приближающегося автомобиля, расстояния до него, ускорения приближающегося автомобиля.
Основные элементы системы, применяемые в этом способе, система, понимаемая как набор элементов или устройств, действия которых объединяются для определенной цели, проиллюстрированы на Фиг. 1; монитор состояния (1), который является элементом для определения режима работы защищенного транспортного средства (20), которое либо находится в рабочем состоянии, либо припарковано при выключенном двигателе, монитор аккумуляторной батареи (2), который является элемент постоянного контроля уровня заряда аккумулятора, и если этот уровень слишком низок (что может быть опасно, если двигатель транспортного средства работает постоянно), активирует переключатель процессов (9), который отключает сигнализацию, которая работает в период парковки автомобиля; регулирование датчика (3), которое является элементом, активизации или деактивации ультразвуковых или оптических датчиков транспортного средства, может применять необходимые алгоритмы для обработки поступающим от датчиков сигналов, что позволяет интерпретировать полученные ими значения; детектор расстояния (4), определяющий момент вхождения объекта в зону, которая может представлять опасность для защищенного транспортного средства (20), детектор близости (5), который использует сигналы, поступающие от ультразвуковых и оптических датчиков, для определения является ли приближающимся объектом пешеход (29), пересекающий зону между транспортными средствами (30), между защищенным транспортным средством (20) и другим припаркованным транспортным средством (31), измеритель скорости и ускорения (6), который является элементом, измеряющим эти основанные на сигналах параметры, поступающие от датчиков, и анализатор пороговых значений параметров (7), определяющий момент, когда параметры скорости, ускорения и расстояния превысят допустимые пределы, и приближающееся транспортное средство может столкнуться с припаркованным транспортным средством, и, наконец, переключатель звуковой и световой сигнализации (8), который, будучи активированным, предупредит приближающегося водителя об опасности до момента столкновения.
Сигнал тревоги подается лишь в том случае, когда условия приближения транспортного средства, а именно, расстояние до него, его ускорение и скорость, представляют реальный риск для припаркованного автомобиля, и поэтому формируется значение, которое называется фактором риска (ФР). Если расстояние между транспортными средствами довольно велико, а скорость приближения к парковке низкая, вероятность столкновения будет минимальна. Если же скорость приближения к парковке велика, а расстояние между транспортными средствами невелико, вероятность столкновения высока, если не наблюдается сильного торможения. Рассматривается диапазон значений для скорости, расстояния и ускорения, которые при объединении формируют опасную для припаркованного автомобиля зону, другие же комбинации приводят к невысокому фактору риска (ФР). Нежелательно активировать сигнал тревоги, если пешеход (29), проходя мимо автомобиля, пересекает переднюю или заднюю часть автомобиля, что обычно происходит при пересечении улицы пешеходом между припаркованными автомобилями. В этом случае предусмотрен учет, так называемого, мгновенного изменения расстояния, когда учитывается, что объект внезапно попадает в поле зрения датчиков, исходя из представления, что объект находится на очень близком расстоянии, и поскольку он появился внезапно, можно исходить из представления, что он имеет чрезвычайно высокую скорость и ускорение, однако в этом случае сигнал тревоги должен оставаться дезактивированным: это достигается путем использования следующей формулы:

где (ДФР) - импакт-фактор расстояния, (ДФС) - импакт-фактор скорости, (ДФУ) - импакт-фактор ускорения и (ДФМИР) - импакт-фактор мгновенного изменения расстояния, который может принимать только два значения, единица или ноль. Таким образом, если человек или животное перемещаются по касательной в непосредственной близости от передней или задней части транспортного средства, то датчики, хотя и определяют очень высокую скорость подхода, большое ускорение и минимальное расстояние до припаркованного автомобиля, фактор воздействия данного объекта будет равен нулю, и, следовательно, фактор риска (ФР) окажется нулевым, и, как проиллюстрировано на Фиг. 1, звуковая и световая сигнализация не активируются, а область видимости будет отслеживаться далее для оценивания новых событий.
На Фиг. 2 проиллюстрирована зона влияния каждого импакт-фактора, таким образом, импакт-фактор расстояния (10) определяет, что следует учитывать расстояния, которые не являются чрезвычайно маленькими или чрезвычайно большими, импакт-фактор скорости (11) определяет, что область действия этого параметра увеличивается с увеличением скорости и уменьшается, если скорость чрезвычайно высока, что и может служить указанием на возможность прохождения транспортного средства в стороне от припаркованного автомобиля и с высокой скоростью, которая обнаруживается одним из датчиков, и что-то подобное происходит с импакт-фактором ускорения (12), тогда как импакт-фактор мгновенного изменения расстояния (13) имеет только два значения: единица или ноль, данный показатель позволяет исключить из рассмотрения случаи, связанные с прохождением пешехода, животного или проездом велосипедиста, все рассмотренные факторы определялись эмпирическим путем.
На Фиг. 1 проиллюстрирован момент взаимодействия элементов или устройств системы, таким образом, транспортное средство активизирует звуковой сигнал тревоги и кратковременно включает световой сигнал только тогда, когда имеется достаточный заряд батареи, когда обнаруживается, что при выключенном двигателе датчики обнаруживают объект в зоне восприимчивости, причем уточняется, что этот объект не является пешеходом, животным или велосипедистом, и когда фактор риска (ФР) превышает некое заранее установленное предельное значение.
В некоторых случаях определенные транспортные средства не оснащены ультразвуковыми датчиками на бамперах, но имеют камеры, которые в основном установлены на задней части, и, кроме того, имеющиеся электронные камеры с очень небольшими размерами, относительно недороги и могут легко устанавливаться на защитной решетке радиатора или бампере и управляться центральным компьютером по Bluetooth, WiFi, либо с помощью других проводных или беспроводных соединений. Подобные камеры могут применяться как заменители ультразвуковых датчиков в данном случае, поскольку применяется способ переоборудования этих камер в датчики расстояния, скорости и ускорения. На Фиг. 3 проиллюстрировано, как некоторые элементы камеры, такие как детектор изображения (14) и объектив (15), могут генерировать изображение (17) объекта (16), наблюдаемое в том случае, когда этот объект приближается или удаляется от детектора изображений (14). При этом изображение (17) воспринимается как увеличивающееся или уменьшающееся, причем изображение увеличивается с приближением некого объекта изображения, и уменьшается при его удалении. Это не позволяет определить расстояние и скорость объекта, если мы не знаем точных его размеров, но в этом приложении используется объект, размеры которого мы можем точно знать, и этот объект представляет собой регистрационную номерную табличку автомобиля, особенно если в качестве эталона взята высота пластины, поскольку сама пластина может устанавливаться в рамочном обрамлении, которые изменяют ее видимые размеры, однако, цифры и буквы на табличке всегда имеют одинаковые размеры. На Фиг. 4 проиллюстрировано, как защищенная машина (20), оборудованная передней камерой (18) и задней камерой (19), может использовать эту камеру для определения расстояния до номерной таблички (22) приближающегося транспортного средства (21), и изображение в камере воспринимает этот размер, если номера номерной таблички таковы, что увеличиваются по мере сближения машин, таким образом, изображение номерной таблички на большом расстоянии (23) будет меньше, чем изображение номерной таблички на среднем расстоянии (24), а оно, в свою очередь, будет меньше изображения номерной таблички уже на небольшом расстоянии (25).
На Фиг. 5 проиллюстрировано, как увеличиваются цифры (26) номерной таблички (22) по мере сближения транспортных средств, причем в данном случае в качестве ссылки рассматривается только высота цифр номерной таблички, другими словами, их вертикальный размер, что связано с тем обстоятельством, что, как проиллюстрировано на Фиг. 6, при приближении автомобиля по диагонали, ширина цифр (28) будет более короткой, однако, если сближение транспортных средств проходит по прямой, воспринимаемая высота цифр (27) не меняется, если номерная табличка (22) находится на определенном фиксированном расстоянии от задней камеры (19), независимо от того, сближаются ли транспортные средства (20) и (21) по прямой или по диагонали.
На Фиг. 7 проиллюстрирован пешеход (29), пересекающий зону между транспортными средствами (30), и в данном случае, в отличие от варианта, когда используются ультразвуковые датчики, задняя камера (19) легко различает транспортное средство и пешехода по той простой причине, что у пешехода отсутствует табличка с номером и, таким образом, в данном случае не следует беспокоиться об активизации тревожного сигнала.
Дополнительным преимуществом использования камер является тот факт, что с их помощью можно зарегистрировать номерную табличку транспортного средства, которое воздействует на защищенный припаркованный автомобиль, когда транспортное средство, перемещение которого несет угрозу припаркованному автомобилю, игнорирует предупреждения, и информация может передаваться с помощью Интернета вещей (IoT) или сохраниться в памяти центрального компьютера для последующего использования, причем сохраняются и данные о времени и месте, где произошло столкновение. Связь между камерами, центральным компьютером и соответствующими оперативными элементами, которые для этой цели сконфигурированы на центральном компьютере, может быть как проводной, так и беспроводной.
Таким образом, процесс определения расстояния между номерным знаком и камерой реализуется путем измерения высоты номеров зарегистрированной номерной таблички детектором изображения (14) и вследствие того, что все цифры имеют одинаковую высоту, легко устанавливается связь между высотой воспринимаемой номерной (27) таблички и расстоянием между номерной табличкой и камерой, и путем последующего измерения относительных изменений этой высоты можно определить время, скорость приближения транспортного средства, измерить изменение этой скорости во времени, получить ускорение, которое мгновенно дает нам требуемые параметры, вычисляя функции первой и второй производной по времени, таким образом определяется расстояние между номерной табличкой и камерой в зависимости от времени, причем все эти вычисления основаны на воспринимаемой камерой высоте цифр (27) номерной таблички, значение вариации s получают как непрерывную функцию, причем эти данные используются для подключения измерителя скорости и ускорения (6) и детектора расстояния (4) для соответствующей обработки в соответствии со способом и системой, которые проиллюстрированы на диаграмме 1.
Изобретение относится к области электронных систем защиты и сигнализации для защиты транспортного средства от ударов при парковке транспортного средства. Способ обеспечения защиты от удара припаркованного транспортного средства включает использование анализатора пороговых параметров для определения допустимых комбинаций ускорения, расстояния и скорости, которые не считаются рискованными. Все данные интегрированы в систему отсчета, к которой применяется уравнение для оценки фактора риска (ФР), который определяет, насколько опасен маневр приближения в заданный момент, и, в случае превышения пороговой системы отсчета, анализатор пороговых параметров выполнен с возможностью активировать световые сигналы и звуковой сигнал посредством переключателя. Способ включает определение различения между транспортным средством и пешеходом при определении приближающегося объекта. Способ включает использование сигналов датчика приближения, поступающих от ультразвуковых и/или оптических датчиков, для определения того, является ли приближающийся объект пешеходом. Достигается обеспечение защиты транспортного средства от ударов при парковке транспортного средства. 6 з.п. ф-лы, 7 ил.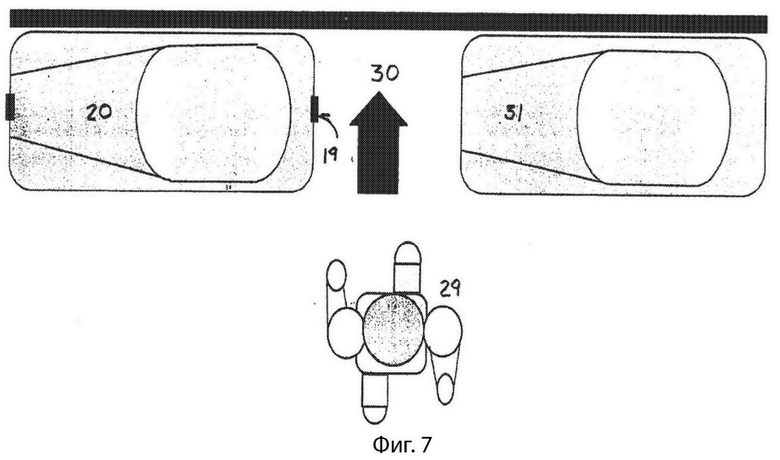
1. Способ обеспечения защиты от удара припаркованного транспортного средства, которое содержит двигатель и центральный компьютер, содержащий монитор состояния для определения, является ли двигатель выключенным, датчик управления, датчик расстояния, датчик приближения, определитель скорости и ускорения, анализатор пороговых параметров, переключатели светового сигнала и звукового сигнала, монитор аккумуляторной батареи и переключатель процесса, а также датчики, расположенные на передней и задней частях транспортного средства,
причем способ включает использование анализатора пороговых параметров, представляющего собой оперативное устройство, выполненное в центральном компьютере и имеющее файл данных, определяющий допустимые комбинации ускорения, расстояния и скорости, которые не считаются рискованными, причем все эти данные интегрированы в систему отсчета, к которой применяется уравнение для оценки фактора риска (ФР), который определяет, насколько опасен маневр приближения в заданный момент, и в случае превышения пороговой системы отсчета анализатор пороговых параметров выполнен с возможностью активировать световые сигналы и звуковой сигнал посредством переключателя,
причем способ включает определение различения между транспортным средством и пешеходом при определении приближающегося объекта, при этом датчики, размещенные на передней и задней частях транспортного средства, представляют собой оптические датчики и/или ультразвуковые датчики, причем способ включает использование сигналов датчика приближения, поступающих от ультразвуковых и/или оптических датчиков, для определения того, является ли приближающийся объект пешеходом, и
причем способ включает активацию световых сигналов и звуковых сигналов только при достаточном заряде батареи, когда определено, что двигатель выключен, когда датчиками определен объект в зоне чувствительности, когда определено, что этот объект является транспортным средством, и когда фактор риска ФР превышает пороговую систему отсчета.
2. Способ по п. 1, отличающийся тем, что ультразвуковые датчики характеризуются тем, что они размещены на бамперах или защитных решетках транспортного средства в качестве исходного оборудования и подключены к датчику управления центрального компьютера таким образом, что они составляют первый элемент, который, посредством измерения расстояния до окружающих объектов, предоставляет необходимую информацию центральному компьютеру для получения трех основных параметров, которыми являются расстояние, скорость и ускорение.
3. Способ по п. 1, отличающийся тем, что оптические датчики содержат электронные камеры, которые соединены с центральным компьютером проводным или беспроводным способом для обеспечения центрального компьютера информацией о вертикальном размере номеров на номерных знаках транспортных средств, которые приближаются к защищаемому транспортному средству, при этом детектор расстояния центрального компьютера определяет расстояние, на котором указанная номерная табличка находится по отношению к указанной камере, на основании величины высоты цифр зарегистрированного номерного знака в детекторе изображения камеры, причем на основании этого измерения расстояния и вычисления первой и второй производной по времени от этой величины система определяет расстояние, скорость и ускорение приближения.
4. Способ по п. 3, отличающийся тем, что электронные камеры характеризуются тем, что они используются в качестве датчиков расстояния, которые в случае столкновения с защищаемым припаркованным транспортным средством делают фотографию номерного знака транспортного средства, допустившего столкновение, сохраняют эту информацию и отправляют ее через центральный компьютер и интернет вещей туда, где она будет доказательством указанного случая с данными о времени и месте.
5. Способ по п. 1, отличающийся тем, что датчик приближения выполнен с возможностью определения того, что движущийся объект является пешеходом, путем определения наличия мгновенного изменения расстояния, при котором объект внезапно появляется в поле зрения датчиков.
6. Способ по п. 1, отличающийся тем, что оптический датчик содержит камеру, а датчик приближения выполнен с возможностью определения того, что объект является пешеходом, посредством определения отсутствия номерного знака на указанном объекте.
7. Способ по п. 1, отличающийся тем, что датчики, размещенные на передней и задней частях транспортного средства, являются исключительно ультразвуковыми датчиками, и
при этом фактор риска ФР рассчитывается по уравнению ФР = (ДФР) (ДФС) (1 + ДФУ) (ДФМИР), где ДФР - импакт-фактор расстояния, ДФС - импакт-фактор скорости, ДФУ - импакт-фактор ускорения и ДФМИР - импакт-фактор мгновенного изменения расстояния, который имеет только одно из двух значений: единицу или ноль.
| US 2012286974 A1, 15.11.2012 | |||
| US 2005035879 A1, 17.02.2005 | |||
| DE 19937939 A1, 01.03.2001 | |||
| US 2014168435 A1, 19.06.2014 | |||
| MX 2012008184 A, 17.01.2014. |
