ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее раскрытие относится в общем к способам, системам и устройствам обеспечения уведомлений водителя или для автономных транспортных средств, и, в частности, относится к способам, системам и устройствам безопасного выезда с машиноместа.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Автомобили обеспечивают значительную часть транспортировки для коммерческих, государственных и частных субъектов. Из-за высокой себестоимости и цены автомобилей и возможного причинения ущерба пассажирам и водителям, безопасность вождения и предотвращение столкновений или аварий являются чрезвычайно важными.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Согласно одному аспекту изобретения предложена система, содержащая: компонент обнаружения движения, выполненный с возможностью определения, что транспортное средство или водитель выезжает или готовится выезжать с парковочного места; компонент определения наличия, выполненный с возможностью определения на основании базы данных истории движения, присутствует ли парковочный барьер на парковочном месте; и компонент уведомления, выполненный с возможностью обеспечения указания наличия парковочного барьера водителю или автоматизированной системе вождения транспортного средства.
Согласно одному варианту осуществления системы компонент определения наличия выполнен с возможностью определения наличия парковочного барьера в ответ на определение того, что транспортное средство в настоящее время припарковано на парковочном месте.
Согласно другому варианту осуществления системы компонент уведомления выполнен с возможностью обеспечения одного или более из визуального указания и аудио указания наличия парковочного барьера водителю.
Согласно другому варианту осуществления системы компонент уведомления выполнен с возможностью обеспечения указания путем отправки сообщения автоматизированной системе вождения.
Согласно другому варианту осуществления системы компонент уведомления дополнительно выполнен с возможностью обеспечения указания местоположения парковочного барьера.
Согласно другому варианту осуществления системы компонент обнаружения движения выполнен с возможностью определения, что транспортное средство выезжает или готовится выезжать с парковочного места на основании одного или более из: обнаружения входа человека в транспортное средство; обнаружения запуска транспортного средства; обнаружения наличия ключа в транспортном средстве; определения переключения транспортного средства на ведущую передачу или в режим движения; и приема указания от автоматизированной системы вождения о том, что автоматизированная система вождения готовится выезжать с парковочного места.
Согласно другому варианту осуществления система дополнительно содержит один или более датчиков для получения данных об объектах вблизи транспортного средства и компонент обнаружения барьера, выполненный с возможностью обнаружения парковочного барьера при въезде транспортного средства или приближении транспортного средства к парковочному месту.
Согласно другому варианту осуществления система дополнительно содержит компонент истории движения, выполненный с возможностью обновления истории движения для включения указания наличия парковочного барьера.
Согласно другому варианту осуществления системы датчики имеют положение или поле обзора, которое не может захватывать область под или в пределах определенного диапазона от края транспортного средства.
Согласно второму аспекту изобретения предложен способ, содержащий этапы, на которых: обнаруживают наличие парковочного барьера при въезде транспортного средства на машиноместо; сохраняют в памяти указание наличия парковочного барьера вблизи машиноместа; определяют, что водитель или автоматизированная система вождения транспортного средства выезжает или готовится выезжать с машиноместа; и в ответ на определение, что транспортное средство собирается выезжать с машиноместа: извлекают указание наличия парковочного барьера из памяти; и уведомляют водителя или автоматизированную систему вождения транспортного средства о наличии парковочного барьера.
Согласно одному варианту осуществления способа определение, что водитель или автоматизированная система вождения транспортного средства выезжает или готовится выезжать с машиноместа, содержит одно или более из: обнаружения входа человека в транспортное средство; обнаружения запуска транспортного средства; обнаружения наличия ключа в транспортном средстве; определения переключения транспортного средства на ведущую передачу или в режим движения; и приема указания от автоматизированной системы вождения о том, что автоматизированная система вождения готовится выезжать с машиноместа.
Согласно другому варианту осуществления способа указание наличия парковочного барьера дополнительно содержит указание местоположения парковочного барьера относительно транспортного средства.
Согласно другому варианту осуществления способа уведомление водителя или автоматизированной системы вождения содержит уведомление водителя или автоматизированной системы вождения о местоположении парковочного барьера относительно транспортного средства.
Согласно другому варианту осуществления способ дополнительно содержит этап, на котором определяют, что транспортное средство в настоящее время припарковано на машиноместе.
Согласно другому варианту осуществления способа уведомление водителя содержит обеспечение одного или более из визуального указания и аудио указания наличия парковочного барьера водителю.
Согласно другому варианту осуществления способа уведомление автоматизированной системы вождения содержит отправку сообщения автоматизированной системе вождения.
Согласно третьему аспекту изобретения предложен считываемый компьютером носитель данных, хранящий инструкции, которые при исполнении одним или более процессорами предписывают процессору: получать данные датчиков для множества объектов в области вблизи транспортного средства при въезде транспортного средства на парковочное место; обрабатывать данные датчиков для определения наличия парковочного барьера спереди или сзади парковочного места; обновлять историю движения для указания местоположения парковочного барьера; обнаруживать одно или более из входа пользователя на водительское сиденье транспортного средства, переключения транспортного средства на ведущую передачу и запуска транспортного средства; и уведомлять водителя или автоматизированную систему управления движением транспортного средства о наличии парковочного барьера спереди или сзади транспортного средства.
Согласно одному варианту осуществления считываемого компьютером носителя данных обнаружение запуска транспортного средства содержит обнаружение одного или более из запуска двигателя транспортного средства и включения питания автоматизированной системы управления движением.
Согласно другому варианту осуществления считываемого компьютером носителя данных данные датчиков не обеспечивают данные для области в пределах порогового расстояния от переднего или заднего бампера транспортного средства.
Согласно другому варианту осуществления считываемого компьютером носителя данных инструкции дополнительно предписывают процессору определять, что транспортное средство находится на парковочном месте в ответ на обнаружение одного или более из входа пользователя на водительское сиденье транспортного средства, переключения транспортного средства на ведущую передачу и запуска транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0003] Неограничивающие и неисчерпывающие варианты осуществления настоящего изобретения описаны со ссылкой на нижеследующие фигуры, на которых одинаковые ссылочные позиции относятся к одинаковым частям на всех различных видах, кроме тех случаев, когда указано иное. Преимущества настоящего изобретения станут лучше понятны со ссылкой на нижеследующее описание и сопровождающие чертежи, на которых:
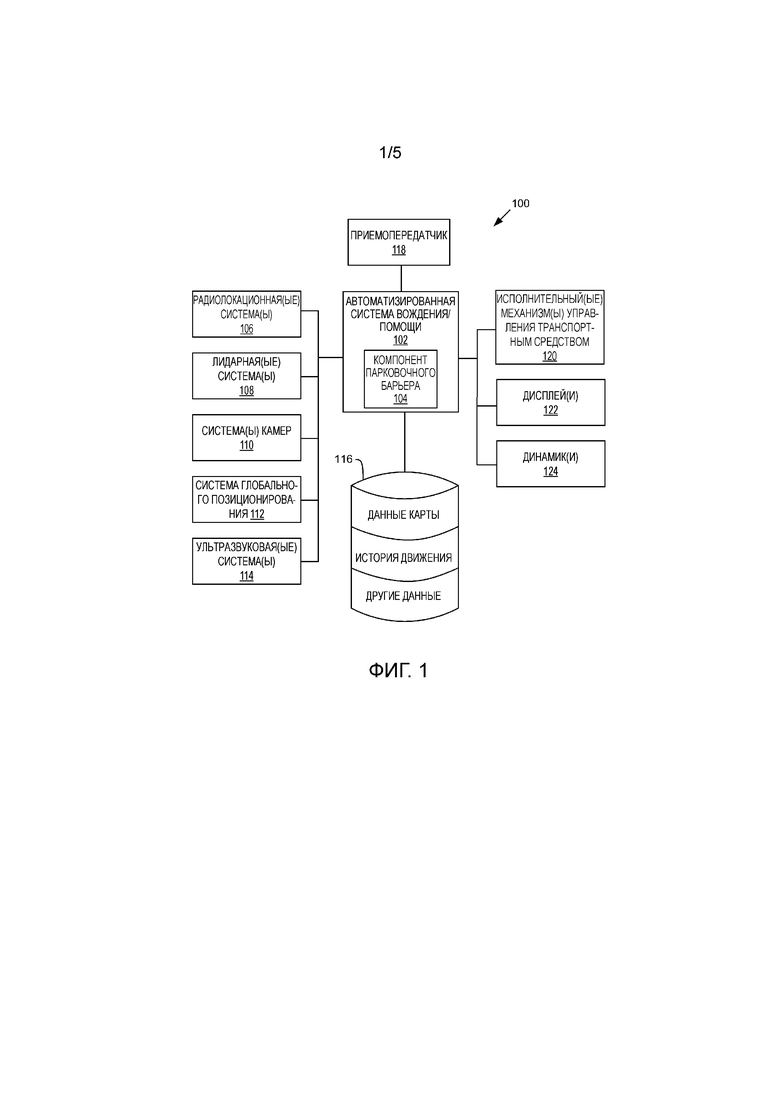
[0004] Фиг. 1 представляет собой блок-схему, иллюстрирующую вариант осуществления системы управления транспортным средством, которая включает в себя автоматизированную систему вождения/помощи;
[0005] Фиг. 2 представляет собой схематический вид сверху, иллюстрирующий автомобильную стоянку согласно одному варианту осуществления;
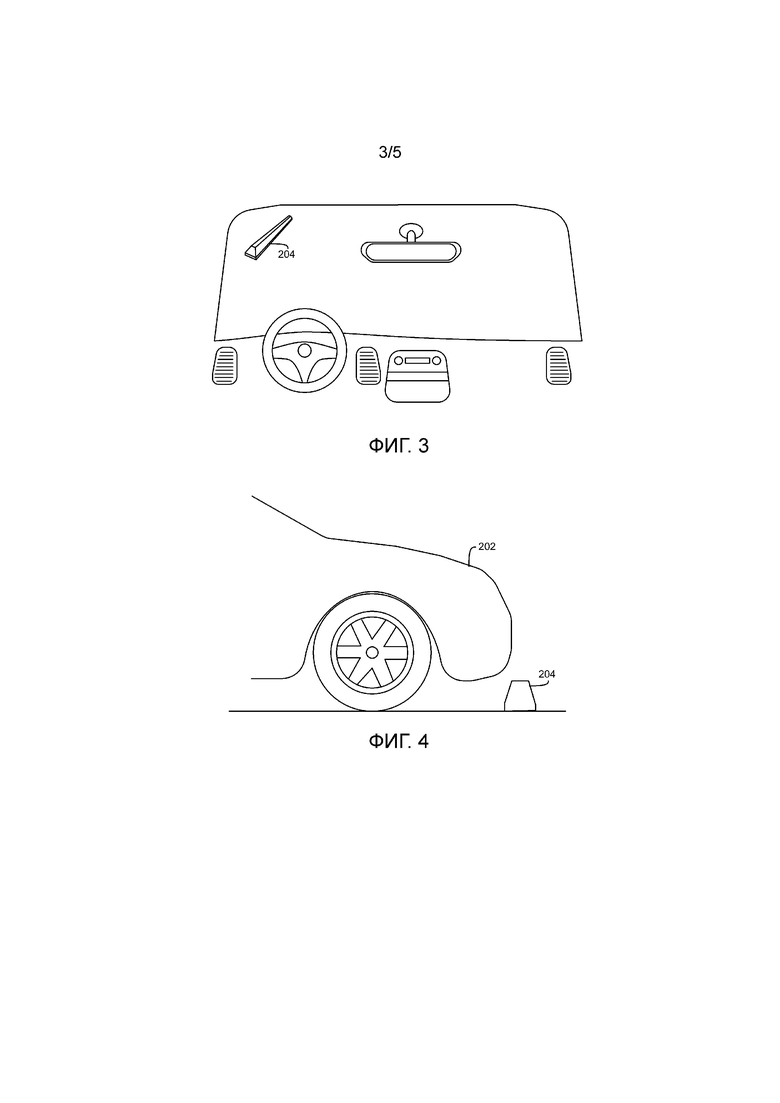
[0006] Фиг. 3 представляет собой схематическое изображение, иллюстрирующее вид парковочного барьера или парковочного бордюра через ветровое стекло транспортного средства;
[0007] Фиг. 4 представляет собой схематическое изображение, иллюстрирующее вид сбоку транспортного средства, припаркованного вблизи парковочного барьера или парковочного бордюра;
[0008] Фиг. 5 представляет собой схематическое изображение, иллюстрирующее уведомления, обеспечиваемые водителю или пассажиру транспортного средства;
[0009] Фиг. 6 представляет собой блок-схему, иллюстрирующую примерные компоненты компонента парковочного барьера согласно одному варианту осуществления; и
[0010] Фиг. 7 представляет собой блок-схему, иллюстрирующую способ обнаружения и предотвращения столкновения с парковочным барьером согласно одному варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0011] Очень часто столкновения или аварии транспортных средств происходят во время парковки или выезда с парковочного места или машиноместа. Из-за близкого расстояния до других транспортных средств, пешеходов или других объектов, как правило, имеется небольшой запас на ошибку для предотвращения повреждения транспортных средств, включая царапины на бамперах или боковых панелях. На многих автомобильных стоянках или на других парковочных местах машиноместа обозначены или ограничены по меньшей мере с одной стороны каким-либо парковочным барьером, таким как парковочный бордюр, ограждение или т.п. Парковочные барьеры могут использоваться для предотвращения продвижения транспортного средства слишком далеко вперед (или назад) в другой ряд транспортных средств и могут останавливать перемещение транспортного средства слишком далеко при столкновении колес с барьером. Парковочный барьер может включать в себя, или называться здесь парковочный барьер, парковочный бордюр, парковочный стопор колес, ограждение или т.п.
[0012] Когда транспортное средство въезжает или приближается к машиноместу, пользователь или система вождения может идентифицировать парковочный барьер и парковаться соответственно. Пользователь или система вождения может въезжать в приблизительное положение, не ударяя парковочный барьер, или проезжать вперед до столкновения колес с барьером. Однако после парковки или въезда на машиноместо парковочные барьеры часто находятся вне зоны видимости водителя или датчиков транспортного средства. После парковки и/или после выезда или выключения транспортного средства пользователь или система вождения не может непосредственно увидеть или обнаружить парковочный барьер. Например, водитель может выйти из транспортного средства и пройти к передней части транспортного средства, чтобы увидеть, имеется ли парковочный бордюр, но не может увидеть его из кабины транспортного средства. Подобным образом датчики системы автономного вождения или системы помощи при вождении могут быть направлены так, чтобы видеть области вблизи транспортного средства, но область под передним или задним бампером или на земле вблизи переднего или заднего бампера может находиться вне поля обзора датчиков. Таким образом, система вождения или водитель подвержены риску необнаружения барьера или бордюра.
[0013] Если водитель или система вождения не обнаруживает наличие бордюра, движение транспортного средства вперед через бордюр или парковочный барьер может приводить к значительному повреждению. Например, если транспортное средство движется вперед через барьер, барьер может царапать нижнюю часть транспортного средства или шасси, или транспортное средство может повиснуть на барьере, что приводит к повреждению транспортного средства или невозможности транспортировки пользователя.
[0014] С учетом вышесказанного настоящая заявка раскрывает системы, способы и устройства определения наличия барьера или бордюра. В одном варианте осуществления наличие барьера или бордюра определяется на основании истории движения транспортного средства. Например, система может обращаться к истории движения для просмотра наличия барьера или бордюра на текущем машиноместе транспортного средства. В одном варианте осуществления парковочный бордюр обнаруживается системой при въезде на машиноместо и вводится в базу данных истории движения. Далее транспортное средство может быть выключено, и водитель может покинуть транспортное средство. После определенного периода времени водитель может снова войти в автомобиль, запустить транспортное средство (или систему управления движением) и вспомнить с помощью транспортного средства (например, на основании истории движения), имеется ли парковочный бордюр. При наличии парковочного барьера водитель может выезжать с машиноместа задним ходом, в противном случае, водитель может просто двигаться вперед. Автономное транспортное средство может выполнять подобный сценарий, кроме того, что автономное транспортное средство может выбирать подходящую траекторию для выезда с машиноместа на основании истории движения. Таким образом, следует понимать, что настоящее изобретение применимо ко всем транспортным средствам, будь то автономное или управляемое вручную транспортное средство.
[0015] До настоящего изобретения, если водитель не помнил или не заметил наличие бордюра, водитель вынужден был выйти из транспортного средства и найти возможный бордюр, или предположить (или не проверять) и столкнуться с последствиями. Дополнительно до настоящего изобретения автономное транспортное средство имело возможности слегка сдавать назад, «посмотреть» и затем двигаться вперед или просто всегда выезжать с машиноместа задним ходом.
[0016] В нижеследующем раскрытии сделана ссылка на сопровождающие чертежи, которые образуют его часть, и на которых путем иллюстрации показаны определенные варианты осуществления, в которых изобретение может быть осуществлено на практике. Следует понимать, что могут быть использованы другие варианты осуществления, и могут быть выполнены изменения без отклонения от объема охраны настоящего изобретения. Ссылки в описании на «один вариант осуществления», «вариант осуществления», «примерный вариант осуществления» и т.д. указывают, что описанный вариант осуществления может включать в себя конкретный признак, конструкцию или характеристику, но каждый вариант осуществления необязательно может включать в себя конкретный признак, конструкцию или характеристику. Более того, такие фразы необязательно ссылаются на один и тот же вариант осуществления. Дополнительно, когда конкретный признак, конструкция или характеристика описывается в связи с вариантом осуществления, предполагается, что она находится в пределах знания специалиста в области техники для осуществления такого признака, конструкции или характеристики в связи с другими вариантами осуществления, описанными или нет в явной форме.
[0017] Варианты осуществления раскрытых здесь систем, устройств и способов могут содержать или использовать компьютер специального назначения или общего назначения, включающий в себя компьютерное аппаратное обеспечение, такое как, например, один или более процессоров и системную память, которые более подробно рассмотрены ниже. Варианты осуществления в пределах объема охраны настоящего изобретения также могут включать в себя физический и другой считываемый компьютером носитель для переноса или хранения исполняемых компьютером инструкций и/или структур данных. Такой считываемый компьютером носитель может представлять собой любой доступный носитель, к которому может быть получен доступ посредством вычислительной системы общего назначения или специального назначения. Считываемые компьютером носители, которые хранят исполняемые компьютером инструкции, представляют собой компьютерные носители (устройства) хранения данных. Считываемые компьютером носители, которые переносят исполняемые компьютером инструкции, представляют собой среды передачи данных. Таким образом, путем примера и без ограничения варианты осуществления изобретения могут содержать по меньшей мере два совершенно разных вида считываемых компьютером носителей: компьютерные носители (устройства) хранения данных и среды передачи данных.
[0018] Компьютерный носитель (устройства) хранения данных включает в себя RAM, ROM, EEPROM, CD-ROM, твердотельные накопители («SSD») (например, на основании RAM), флэш-память, память с изменением фазового состояния («PCM»), другие типы памяти, другие накопители на оптических дисках, накопители на магнитных дисках или другие магнитные запоминающие устройства, или любые другие носители, которые могут использоваться для хранения необходимого средства программного кода в виде исполняемых компьютером инструкций или структур данных, и к которым может быть получен доступ посредством компьютера общего назначения или специального назначения.
[0019] Вариант осуществления раскрытых здесь устройств, систем и способов может сообщаться через компьютерную сеть. «Сеть» определяется как одна или более линий передачи данных, которые позволяют передачу электронных данных между компьютерными системами и/или модулями и/или другими электронными устройствами. При передаче или обеспечении информации через сеть или другое коммуникационное соединение (проводное, беспроводное или сочетание проводного или беспроводного) компьютеру, компьютер рассматривает соединение как среду передачи данных. Среда передачи данных может включать в себя сети и/или линии передачи данных, которые могут использоваться для переноса необходимого средства программного кода в виде исполняемых компьютером инструкций или структур данных, и к которым может быть получен доступ посредством компьютера общего назначения или специального назначения. Сочетания вышеописанных элементов также должны быть включены в пределы объема охраны считываемого компьютером носителя.
[0020] Исполняемые компьютером инструкции содержат, например, инструкции и данные, которые при исполнении в процессоре побуждают компьютер общего назначения, компьютер специального назначения или устройство обработки специального назначения к выполнению определенных функций или групп функций. Исполняемые компьютером инструкции могут представлять собой, например, двоичные файлы, инструкции промежуточного формата, такие как язык ассемблера или даже исходный код. Хотя объект описан на языке, характерном для структурных признаков и/или методологических действий, следует понимать, что объект, определенный в приложенной формуле изобретения, необязательно ограничивается описанными выше признаками или действиями. Скорее, описанные признаки и действия раскрыты в качестве примерных форм осуществления формулы изобретения.
[0021] Специалисту в области техники будет понятно, что изобретение может быть осуществлено в сетевых вычислительных средах со многими типами конфигураций вычислительных систем, включая персональные компьютеры, настольные компьютеры, переносные компьютеры, процессоры обработки сообщений, портативные устройства, многопроцессорные системы, микропроцессорную или программируемую бытовую электронику, сетевые персональные компьютеры, миникомпьютеры, большие электронно-вычислительные машины, мобильные телефоны, карманные персональные компьютеры, планшетные компьютеры, пейджеры, маршрутизаторы, коммутационные устройства, различные запоминающие устройства и т.п. Изобретение также может быть осуществлено в распределенных системных средах, где и локальные, и удаленные компьютерные системы, которые соединены (проводными линиями передачи данных, беспроводными линиями передачи данных или сочетанием проводных и беспроводных линий передачи данных) по сети, выполняют задачи. В распределенной системной среде программные модули могут находиться и в локальных, и в удаленных запоминающих устройствах.
[0022] Дополнительно, при необходимости, описанные здесь функции могут выполняться в одном или более из: аппаратного обеспечения, программного обеспечения, микропрограммного обеспечения, цифровых компонентов или аналоговых компонентов. Например, одна или более интегральных схем специального назначения (ASIC) могут быть запрограммированы с возможностью осуществления одной или более описанных здесь систем и процедур. Определенные выражения используются во всем нижеследующем описании и формуле изобретения для обозначения конкретных системных компонентов. Как будет понятно специалисту в области техники, компоненты могут называться разными названиями. Этот документ не предусматривает различие между компонентами, которые отличаются по названию, а не по функции.
[0023] Далее обратимся к фигурам, Фиг. 1 иллюстрирует систему 100 управления транспортным средством, которая включает в себя автоматизированную систему 102 вождения/помощи. Автоматизированная система 102 вождения/помощи может быть использована для автоматизации или управления работой транспортного средства или для обеспечения помощи водителю. Например, автоматизированная система 102 вождения/помощи может управлять одним или более из торможения, рулевого управления, ускорения, фар, предупреждений, уведомлений водителя, радиоприемника или любых других вспомогательных систем транспортного средства. В другом примере, автоматизированная система 102 вождения/помощи не способна обеспечивать какое-либо управление движением (например, рулевое управление, ускорение или торможение), но может обеспечивать уведомления и предупреждения для помощи водителю в безопасном вождении. Автоматизированная система 102 вождения/помощи включает в себя компонент 104 парковочного барьера, который может определять наличие парковочного барьера или бордюра и может уведомлять или предупреждать пользователя или автоматизированную систему 102 вождения/помощи о наличии парковочного барьера.
[0024] Система 100 управления транспортным средством также включает в себя одну или более систем/устройств обнаружения для обнаружения наличия объектов поблизости или определения местоположения основного транспортного средства (например, транспортного средства, которое включает в себя систему 100 управления транспортным средством). Например, система 100 управления транспортным средством может включать в себя радиолокационные системы 106, одну или более лидарных систем 108, одну или более систем 110 камер, GPS 112 и/или ультразвуковые системы 114. Система 100 управления транспортным средством может включать в себя хранилище 116 данных для хранения существенных или полезных данных для навигации и безопасности, таких как история движения, данные карты или другие данные. Система 100 управления транспортным средством также может включать в себя приемопередатчик 118 для беспроводной связи с мобильной или беспроводной сетью, другими транспортными средствами, инфраструктурой или любой другой системой связи. Система 100 управления транспортным средством может включать в себя исполнительные механизмы 120 управления транспортным средством для управления различными аспектами движения транспортного средства, такими как электродвигатели, переключатели или другие исполнительные механизмы, для управления торможением, ускорением рулевым управлением или т.п. Система 100 управления транспортным средством также может включать в себя один или более дисплеев 122, динамиков 124 или других устройств так, что могут быть обеспечены уведомления водителю или пассажиру. Дисплей 122 может включать в себя дисплей на лобовом стекле, дисплей или индикатор на приборной панели, экран дисплея или любой другой визуальный индикатор, который может быть увиден водителем или пассажиром транспортного средства. Динамики 124 могут включать в себя один или более динамиков звуковой системы транспортного средства или могут включать в себя специализированный динамик для уведомления водителя.
[0025] Следует понимать, что вариант осуществления на Фиг. 1 представлен исключительно путем примера. Другие варианты осуществления могут включать в себя меньшее количество или дополнительные компоненты без отклонения от объема охраны изобретения. Дополнительно проиллюстрированные компоненты могут быть объединены или включены в другие компоненты без ограничения. Например, компонент 104 парковочного барьера может быть отделен от автоматизированной системы 102 вождения/помощи, а хранилище 116 данных может быть включено как часть автоматизированной системы 102 вождения/помощи и/или часть компонента 104 парковочного барьера.
[0026] Радиолокационная система 106 может включать в себя любую радиолокационную систему, хорошо известную в уровне техники. Работа и характеристики радиолокационной системы в общем хорошо понятны. В общем радиолокационная система 106 работает путем передачи радиосигналов и обнаружения отражений от объектов. В наземных применениях радиолокатор может быть использован для обнаружения физических объектов, таких как другие транспортные средства, парковочные барьеры или парковочные бордюры, элементы ландшафта (например, деревья, утесы, скалы, холмы или т.п.), края дорог, знаки, здания или другие объекты. Радиолокационная система 106 может использовать отраженные радиоволны для определения размера, формы, расстояния, текстуры поверхности или другой информации о физическом объекте или материале. Например, радиолокационная система 106 может сканировать область для получения данных или объектов в пределах определенного диапазона и угла обзора радиолокационной системы 106. В одном варианте осуществления радиолокационная система 106 выполнена с возможностью генерации информации о восприятии из области вблизи транспортного средства, такой как одна или более областей поблизости или вокруг транспортного средства. Например, радиолокационная система 106 может получать данные об областях поверхности земли или вертикальной области, непосредственно прилегающей или находящейся вблизи транспортного средства 100. Радиолокационная система 106 может включать в себя одну из многих широко доступных имеющихся в продаже радиолокационных систем. В одном варианте осуществления радиолокационная система 106 может обеспечивать данные о восприятии, включающие в себя двумерную или трехмерную карту или модель, для автоматизированной системы 102 вождения/помощи для обращения или обработки.
[0027] Лидарная система 108 может включать в себя любую лидарную систему, известную в уровне техники. Принципы работы и характеристики лидарных систем в общем хорошо понятны. В общем лидарная система 108 работает путем излучения лазеров с длиной волны видимого диапазона или с длиной волны инфракрасного диапазона и обнаружения отражений излучения от объектов. В наземных применениях лазеры могут быть использованы для обнаружения физических объектов, таких как другие транспортные средства, парковочные барьеры или парковочные бордюры, элементы ландшафта (например, деревья, утесы, скалы, холмы или т.п.), края дорог, знаки, здания или другие объекты. Лидарная система 108 может использовать отраженное лазерное излучение для определения размера, формы, расстояния, текстуры поверхности или другой информации о физическом объекте или материале. Например, лидарная система 108 может сканировать область для получения данных или объектов в пределах определенного диапазона и угла обзора лидарной системы 108. Например, лидарная система 108 может получать данные об областях поверхности земли или вертикальной области, непосредственно прилегающей или находящейся вблизи транспортного средства. Лидарная система 108 может включать в себя одну из многих широко доступных имеющихся в продаже лидарных систем. В одном варианте осуществления лидарная система 108 может обеспечивать данные о восприятии, включающие в себя двумерную или трехмерную модель или карту обнаружения объектов или поверхностей.
[0028] Система 110 камер может включать в себя одну или более камер, таких как камеры, работающие в видимом диапазоне длин волн, или инфракрасные камеры. Система 110 камер может обеспечивать видеопоток или периодические изображения, которые могут быть обработаны для обнаружения объектов, дорожной идентификации и позиционирования или другого обнаружения или позиционирования. В одном варианте осуществления система 110 камер может включать в себя две или более камер, которые могут быть использованы для обеспечения определения дальности (например, определения расстояния) для объектов в поле обзора.
[0029] Система 112 GPS представляет собой один вариант осуществления системы позиционирования, которая может обеспечивать географическое местоположение транспортного средства на основании сигналов от спутников или радиовышек. Системы 112 GPS являются хорошо известными и широко доступными в уровне техники. Хотя системы 112 GPS могут обеспечивать очень точную информацию позиционирования, системы 112 GPS в общем обеспечивают мало или совсем не обеспечивают информацию о расстояниях между транспортным средством и другими объектами. Скорее, они просто обеспечивают местоположение, которое далее может сравниваться с другими данными, такими как карты, для определения расстояний до других объектов, дорог или интересующих мест.
[0030] Ультразвуковая система 114 может быть использована для обнаружения объектов или расстояний между транспортным средством и объектами с использованием ультразвуковых волн. Например, ультразвуковая система 114 может излучать ультразвуковые волны из местоположения на бампере или вблизи бампера или местоположения боковой панели транспортного средства. Ультразвуковые волны, которые могут перемещаться на короткие расстояния по воздуху, могут отражаться от других объектов и обнаруживаться ультразвуковой системой 114. На основании количества времени между излучением и приемом отраженных ультразвуковых волн ультразвуковая система 114 может обнаруживать точные расстояния между бампером или боковой панелью и любыми другими объектами. За счет более короткого диапазона ультразвуковые системы 114 могут быть более полезны для обнаружения объектов при парковке или обнаружения предстоящих столкновений при движении.
[0031] Хранилище 116 данных хранит данные карты, историю движения и другие данные, которые могут включать в себя другие навигационные данные, настройки или рабочие инструкции для автоматизированной системы 102 вождения/помощи. Данные карты могут включать в себя данные о местоположении, такие как данные о местоположении GPS, для дорог, автомобильных стоянок, машиномест или других мест, где может передвигаться или парковаться транспортное средство. Например, данные о местоположении дорог могут включать в себя данные о местоположении конкретных полос движения, такие как направление полос движения, слияние полос движения, полос движения шоссе или автострады, полос съезда или любой другой полосы движения или разделения дороги. Данные о местоположении также могут включать в себя местоположения каждого машиноместа на автомобильной стоянке или машиномест вдоль дороги. В одном варианте осуществления данные карты включают в себя данные о местоположении одного или более сооружений или объектов на или вблизи дорог или парковочных мест. Например, данные карты могут включать в себя данные, относящиеся к местоположению GPS знаков, местоположению мостов, местоположению зданий или других сооружений или т.п. В одном варианте осуществления данные карты могут включать в себя точные данные о местоположении с точностью до нескольких метров или с субметровой точностью. Данные карты также могут включать в себя данные о местоположении путей, грунтовых дорог или других дорог или путей, которые могут быть пройдены с помощью наземного транспортного средства.
[0032] История движения (или история вождения) может включать в себя данные о местоположении для прошлых поездок или парковочных мест транспортного средства. Например, история движения может включать в себя данные о местоположении GPS для осуществленных предыдущих поездок или путей. В одном варианте осуществления история движения может включать в себя информацию о местоположении парковочных барьеров или парковочных бордюров. Например, каждый раз при парковке транспортного средства, компонент 104 парковочного барьера может быть использован для обнаружения парковочного барьера или бордюра и сохранения указания в хранилище 116 данных о существовании или наличии парковочного барьера или бордюра. В качестве другого примера история движения может включать в себя данные о расстоянии или об относительном местоположении относительно разделительных линий, знаков, линий границ дорог или других объектов или элементов на или вблизи дорог. Данные о расстоянии или об относительном местоположении могут быть определены на основе данных GPS, радиолокационных данных, данных лидарной системы, данных камер или других данных датчиков, собранных во время предыдущих или прошлых поездок, осуществленных транспортным средством. Эти данные истории движения могут быть зарегистрированы автоматизированной системой 102 вождения/помощи для использования в будущем, если/когда данные датчиков будут недоступны. Например, путем сохранения подробного местоположения полос движения, местоположения знаков или других данных автоматизированная система 102 вождения/помощи может очень точно определять местоположение только на основании радиолокационных данных (или сочетания радиолокационных и любых других доступных данных о местоположении/навигационных данных). В одном варианте осуществления автоматизированная система 102 вождения/помощи выполнена с возможностью регистрации данных о движении в хранилище 116 данных для и во время любых поездок или движений, осуществляемых транспортным средством.
[0033] Приемопередатчик 118 выполнен с возможностью приема сигналов от одного или более других источников данных или сигналов. Приемопередатчик 118 может включать в себя один или более радиоприемников, выполненных с возможностью связи в соответствии с множеством стандартов связи и/или с использованием множества различных частот. Например, приемопередатчик 118 может принимать сигналы от других транспортных средств. Прием сигналов от другого транспортного средства называется здесь связь между транспортными средствами (V2V). В одном варианте осуществления приемопередатчик 118 также может быть использован для передачи информации другим транспортным средствам для потенциальной помощи им при определении местоположения транспортных средств или объектов. Во время связи V2V приемопередатчик 118 может принимать информацию от других транспортных средств об их местоположениях, других участниках движения, авариях, дорожных условиях, местоположениях парковочных барьеров или парковочных бордюров или любых других подробностях, которые могут помогать транспортному средству и/или автоматизированной системе 102 вождения/помощи в точном или безопасном движении.
[0034] Приемопередатчик 118 может принимать сигналы от других источников сигналов, которые находятся в фиксированных местоположениях. Приемопередатчики 120 инфраструктуры могут находиться в конкретном географическом местоположении и могут передавать свое конкретное географическое местоположение с временной меткой. Таким образом, автоматизированная система 102 вождения/помощи может определять расстояние от приемопередатчиков инфраструктуры на основании временной метки и далее определять свое местоположение на основании местоположения приемопередатчиков инфраструктуры. В одном варианте осуществления прием или отправка данных о местоположении от устройств или вышек в фиксированных местоположениях называется здесь связь между транспортным средством и инфраструктурой (V2X). В одном варианте осуществления выражение связь V2X также может включать в себя связь V2V.
[0035] В одном варианте осуществления приемопередатчик 118 может отправлять и принимать данные о местоположении через сеть мобильной связи или сотовое соединение. Например, приемопередатчик 118 может принимать обновленные данные о местоположении для конкретной области, когда транспортное средство перемещается по проезжей части. Подобным образом приемопередатчик 118 может принимать данные истории движения для основного транспортного средства или других транспортных средств, которые движутся по дороге или припаркованы на автомобильной стоянке в данном местоположении или на данном машиноместе. Например, приемопередатчик 118 может принимать данные, которые указывают местоположения знаков, парковочных барьеров или парковочных бордюров или других объектов, которые могут быть обнаружены с использованием радиолокационной системы 106, лидарной системы 108, системы 110 камер, системы 112 GPS или ультразвуковой системы 114. Если приемопередатчик 118 может принимать сигналы от трех или более приемопередатчиков инфраструктуры, автоматизированная система 102 вождения/помощи может выполнять триангуляцию ее географического местоположения.
[0036] В одном варианте осуществления автоматизированная система 102 вождения/помощи выполнена с возможностью управления движением или навигацией основного транспортного средства. Например, автоматизированная система 102 вождения/помощи может управлять исполнительными механизмами 120 управления транспортным средством для движения по траектории на дороге, автомобильной стоянке, подъездной дороге или другим местам. Например, автоматизированная система 102 вождения/помощи может определять траекторию на основании информации или данных о восприятии, обеспечиваемых любым из компонентов 106-118.
[0037] Далее со ссылкой на Фиг. 2 показан схематический вид сверху автомобильной стоянки 200 с множеством парковочных мест. Показано транспортное средство 202, приближающееся или въезжающее на конкретное машиноместо, имеющее парковочный барьер 204. Парковочный барьер 204 включает в себя парковочный бордюр. Варианты осуществления парковочных бордюров включают в себя бетонные, резиновые или другие барьеры, которые размещены на парковочных местах для предотвращения выезда или продвижения транспортных средств слишком далеко в одном или более направлениях. Автомобильная стоянка 200 включает в себя парковочный барьер 204 для каждого машиноместа. Однако некоторые машиноместа могут быть не оборудованы парковочным барьером 204, или машиноместа могут быть непостоянно оборудованы парковочными барьерами 204 так, что водитель или система не может знать, что конкретное машиноместо включает в себя или не включают в себя парковочный барьер 204 на основании других машиномест. Согласно одному варианту осуществления, как обозначено линией 206, когда транспортное средство 202 въезжает на машиноместо, компонент 104 парковочного барьера обнаруживает наличие парковочного барьера 204 и может сохранять указание наличия парковочного барьера 204 в памяти.
[0038] Когда транспортное средство 202 припарковано, парковочный бордюр 204 может быть больше не виден человеку в транспортном средстве 202 или одному или более датчикам транспортного средства 202 (таким как компоненты 106-110 и/или 114). Когда транспортное средство выключено, или водитель покинул транспортное средство, указание наличия парковочного барьера 204 сохраняется в памяти. При возвращении водителя, при запуске транспортного средства 202 или при возникновении другого события, которое указывает, что транспортное средство 202 покидает или готовится покинуть машиноместо, компонент 104 парковочного барьера может извлекать указание о наличии парковочного барьера 204 и напоминать водителю или автоматизированной системе 102 вождения/помощи о наличии барьера 204. Таким образом, система может сохранять данные, относящиеся к наличию парковочного барьера 204, при въезде на машиноместо и позже напоминать водителю или автоматизированной системе вождения о парковочном барьере 204 при подготовке к выезду с машиноместа. Таким образом, датчики могут быть использованы для обнаружения наличия барьера 204, сохранения указания наличия барьера 204 и далее сообщения пользователю о наличии или отсутствии барьера 204. Например, пользователь может быть уведомлен, когда пользователь снова запускает транспортное средство, возвращается в транспортное средство или иным образом указывает, что он готов к движению. Подобным образом автоматизированная система может проверять историю движения для определения наличия барьера 204.
[0039] Хотя Фиг. 2 иллюстрирует вид в плане автомобильной стоянки, транспортные средства могут быть припаркованы в широком множестве мест, где могут иметься парковочные барьеры 204 или парковочные бордюры. Например, парковка на обочинах дорог, парковка на подъездных дорогах или любое другое парковочное место также могут включать в себя парковочный барьер, парковочный бордюр, стопор колес, ограждение или другой объект для ограничения парковочных мест или машиномест.
[0040] Фиг. 3 иллюстрирует вид из кабины через ветровое стекло транспортного средства 202, когда транспортное средство 202 приближается к парковочному барьеру 204. Когда транспортное средство 202 въезжает на машиноместо, парковочный барьер 204 виден водителю (и/или одному или более датчикам). При приближении компонент 104 парковочного барьера может обнаруживать наличие парковочного барьера 204 и определять местоположение транспортного средства 202 относительно парковочного барьера 204 при парковке транспортного средства 202. Например, после того, как парковочный барьер 204 выходит из поля обзора, компонент 104 парковочного барьера может отслеживать перемещение транспортного средства 202 и определять местоположение парковочного барьера 204 на основании относительного положения парковочного барьера 204, когда он находился в поле обзора.
[0041] Фиг. 4 иллюстрирует вид сбоку транспортного средства 202 и парковочного барьера 204 после того, как транспортное средство 202 припарковано. Парковочный барьер 204 не виден через ветровое стекло транспортного средства 202, и один или более датчиков, установленных на или вблизи капота или крыши транспортного средства 202, также не могут обнаружить парковочный барьер 204.
[0042] Фиг. 5 иллюстрирует вид из кабины через ветровое стекло транспортного средства после того, как транспортное средство 202 припарковано за парковочным барьером 204 (не виден на Фиг. 5). Водителю или одному или более датчикам не видно вероятное местоположение парковочного барьера 204. Таким образом, пользователь или система вождения находится в опасном положении для движения транспортного средства 202 вперед через парковочный барьер 204, которое может приводить к повреждению транспортного средства 202 или приводить к тому, что транспортное средство 202 повиснет или застрянет. Однако может быть обеспечено уведомление водителю (или автоматизированной системе 102 вождения/помощи) посредством компонента 104 парковочного барьера о наличии парковочного барьера 204. В частности, проиллюстрировано визуальное указание 502 на приборной панели с пиктограммой 504, указывающей наличие парковочного барьера 204, со словами «!ПАРКОВОЧНЫЙ БАРЬЕР! НЕ ДВИГАТЬСЯ ВПЕРЕД». Следует понимать, что может быть обеспечено другое письменное указание для предупреждения водителя о наличии парковочного барьера 204. Пиктограмма 504 стилистически и визуально указывает транспортное средство 202 с находящимся перед ним барьером 204. В одном варианте осуществления барьер на пиктограмме 504 может иметь цвет, отличный от транспортного средства для указания, что он может быть опасным. Пиктограмма 504 может изменяться, если барьер находится сзади транспортного средства. Например, барьер может быть изображен под, а не над стилизованным транспортным средством на пиктограмме 504. Звуковое сообщение 506 (например, «Не двигаться вперед. Перед транспортным средством находится парковочный барьер.») может быть воспроизведено вслух так, что водитель слышит голосовые инструкции, даже если водитель не видит визуальное указание 502. Звуковое и визуальное сообщения на Фиг. 5 представлены исключительно путем примера и могут значительно отличаться в различных вариантах осуществления.
[0043] Фиг. 6 представляет собой структурную схему, иллюстрирующую примерные компоненты компонента 104 парковочного барьера. В изображенном варианте осуществления компонент 104 парковочного барьера включает в себя компонент 602 обнаружения барьера, компонент 604 истории движения, компонент 606 обнаружения движения, компонент 608 определения наличия, и компонент 610 уведомления. Компоненты 602-610 представлены только в качестве иллюстрации и не все могут быть включены во все варианты осуществления. К тому же, некоторые варианты осуществления могут включать в себя только один или любое сочетание двух или более компонентов 602-610. Некоторые из компонентов 602-610 могут находиться за пределами компонента 104 парковочного барьера, например, в автоматизированной системе 102 вождения/помощи или в другом месте.
[0044] Компонент 602 обнаружения барьера выполнен с возможностью обнаружения парковочного барьера 204, такого как парковочный бордюр. В одном варианте осуществления компонент 602 обнаружения барьера выполнен с возможностью обнаружения парковочного барьера 204 на основании информации от одного или более датчиков, которые получают данные об объектах вблизи транспортного средства 202. В одном варианте осуществления датчики имеют положение или поле обзора, которое может не захватывать области под или в пределах определенного диапазона от края транспортного средства 202. Например, датчики могут быть неспособны обнаруживать барьер 204 или бордюр в пределах порогового расстояния, составляющего пару футов, фут или меньше, или несколько дюймов или меньше от бампера транспортного средства 202. В одном варианте осуществления датчики могут иметь слепую зону под транспортным средством, в том числе под передним или задним бампером.
[0045] В одном варианте осуществления компонент 602 обнаружения барьера выполнен с возможностью обнаружения парковочного барьера 204 во время въезда транспортного средства 202 или приближения транспортного средства 202 к парковочному месту. Например, когда транспортное средство 202 движется по автомобильной стоянке, компонент 602 обнаружения барьера может обнаруживать наличие и/или местоположение парковочных барьеров 204. Когда транспортное средство 202 въезжает на конкретное машиноместо или парковочное место, компонент 602 обнаружения барьера может обнаруживать наличие парковочного барьера 204 и может определять местоположение парковочного барьера 204. Когда транспортное средство 202 въезжает на парковочное место или машиноместо и паркуется, компонент 602 обнаружения барьера может определять местоположение барьера 204 относительно припаркованного транспортного средства 202. Например, компонент 602 обнаружения барьера может определять, что парковочный барьер 204 находится спереди или сзади транспортного средства 202. В одном варианте осуществления после первоначального обнаружения и даже тогда, когда барьер 204 находится вне поля обзора, компонент 602 обнаружения барьера может определять или прогнозировать местоположение барьера 204 относительно транспортного средства 202. Например, когда транспортное средство 202 въезжает на парковочное место или машиноместо, парковочный барьер 204 может находиться вне поля обзора, но его местоположение может быть оценено на основании последнего местоположения, обнаруженного датчиками, и перемещения(й) транспортного средства 202 с момента последнего обнаружения.
[0046] Компонент 604 истории движения выполнен с возможностью хранения указания наличия парковочного барьера 204. Например, компонент 604 истории движения может обновлять историю движения в хранилище 116 данных для включения указания наличия парковочного барьера 204 на конкретном или текущем машиноместе. В одном варианте осуществления история 604 движения может обновляться для указания положения парковочного барьера 204 относительно транспортного средства 202. Например, история движения может включать в себя информацию о наличии барьера 204 спереди или сзади транспортного средства 202.
[0047] Компонент 606 обнаружения движения выполнен с возможностью определения, собирается ли транспортное средство 202 или водитель выезжать с машиноместа. Например, компонент 606 обнаружения движения может определять, что транспортное средство 202 или водитель выезжает или готовится выезжать с парковочного места. Компонент 606 обнаружения движения может определять, что транспортное средство 202 выезжает или готовится выезжать с парковочного места на основании обнаружения человека, входящего в транспортное средство 202. Например, датчик движения, датчик веса, датчик двери и/или другие датчики могут быть использованы для определения того, что пользователь покинул и/или вошел в транспортное средство 202. Компонент 606 обнаружения движения может определять, что транспортное средство 202 выезжает или готовится выезжать с парковочного места на основании обнаружения запуска транспортного средства 202. Например, датчик может сообщать компоненту 606 обнаружения движения, что двигатель транспортного средства 202 запущен, или что транспортное средство 202 включено. Электрические транспортные средства необязательно должны быть запущены в том же смысле, что бензиновые транспортные средства, но могут также быть включены или приведены в режим движения, что может быть обнаружено.
[0048] Компонент 606 обнаружения движения может определять, что транспортное средство 202 выезжает или готовится выезжать с парковочного места на основании обнаружения наличия ключа в транспортном средстве 202. Например, компонент 606 обнаружения движения может принимать сигнал, указывающий, что ключ вставлен в зажигание транспортного средства 202. В качестве другого примера в случае транспортных средств, которые запускаются нажимной кнопкой, или транспортных средств, которые не требуют ключа в зажигании, компонент 606 обнаружения движения может определять, что ключ находится в или в пределах определенного расстояния от датчика близости транспортного средства 202. Компонент 606 обнаружения движения может определять, что транспортное средство 202 выезжает или готовится выезжать с парковочного места на основании определения, что транспортное средство переключено на ведущую передачу или в режим движения. Например, компонент 606 обнаружения движения может обнаруживать, что транспортное средство переключилось с парковочной или нейтральной передачи на первую передачу или передачу заднего хода. Компонент 606 обнаружения движения может определять, что транспортное средство 202 выезжает или готовится выезжать с парковочного места на основании указания от автоматизированной системы вождения, что автоматизированная система вождения готовится выезжать с парковочного места. Например, автоматизированная система 102 вождения/помощи может отправлять сообщение или запрос компоненту 104 парковочного барьера, указывающий, что она готовится выезжать с машиноместа. В одном варианте осуществления компонент 606 обнаружения движения может определять, что транспортное средство 202 выезжает или готовится выезжать с парковочного места на основании обнаружения включения системы управления движением (например, загрузки вычислительной системы, которая управляет транспортным средством или системой управления движением, такой как система 100 управления транспортным средством).
[0049] Компонент 608 наличия выполнен с возможностью определения наличия парковочного барьера 204 на текущем парковочном месте транспортного средства 202. В одном варианте осуществления компонент 608 наличия выполнен с возможностью определения наличия парковочного барьера 204 в ответ на обнаружение того, что транспортное средство 202 собирается выезжать с машиноместа. В одном варианте осуществления компонент 608 наличия может определять, что транспортное средство 202 в настоящее время припарковано на машиноместе. Например, компонент 608 наличия может определять, что транспортное средство 202 находится на парковочном месте в ответ на обнаружение одного или более событий присутствия пользователя на водительском сиденье транспортного средства 202, переключения транспортного средства 202 на ведущую передачу и запуска транспортного средства 202. В одном варианте осуществления компонент 608 наличия выполнен с возможностью определения наличия парковочного барьера 204 в ответ на определение того, что транспортное средство 202 в настоящее время припарковано на парковочном месте.
[0050] В одном варианте осуществления компонент 608 наличия выполнен с возможностью определения наличия парковочного барьера 204 на основании базы данных истории движения. Например, компонент 608 наличия может извлекать указание наличия парковочного барьера 204 из памяти, например, из хранилища 116 данных. В одном варианте осуществления компонент 608 наличия может определять местоположение парковочного барьера 204 или бордюра относительно транспортного средства 202. Например, парковочный барьер 204 может находиться спереди или сзади парковочного места, и эта информация может быть извлечена из памяти.
[0051] Компонент 610 уведомления выполнен с возможностью обеспечения указания наличия парковочного барьера 204 водителю или автоматизированной системе вождения транспортного средства 202. Например, если водитель управляет транспортным средством 202, может быть обеспечено визуальное или звуковое уведомление в кабине транспортного средства 202 (смотри Фиг. 5). В одном варианте осуществления компонент 610 уведомления может обеспечивать указание путем отправки сигнала или сообщения автоматизированной системе вождения о наличии или отсутствии барьера 204. В одном варианте осуществления компонент 610 уведомления обеспечивает указание местоположения парковочного барьера 204. Например, компонент 610 уведомления может указывать, что парковочный барьер 204 или бордюр находится спереди, сзади или в каком-либо другом месте относительно транспортного средства 202.
[0052] Далее со ссылкой на Фиг. 7 проиллюстрирована блок-схема способа 700 обнаружения наличия и предотвращения столкновения с парковочным барьером 204 или бордюром. Способ 700 может быть выполнен автоматизированной системой вождения/помощи или компонентом парковочного барьера, например, автоматизированной системой 102 вождения/помощи на Фиг. 1 или компонентом 104 парковочного барьера на Фиг. 1 или 6.
[0053] На этапе 702 способ 700 начинается, и компонент 602 обнаружения барьера обнаруживает наличие парковочного бордюра или парковочного барьера при въезде транспортного средства на машиноместо. На этапе 704 компонент 604 истории движения сохраняет в памяти указание наличия парковочного бордюра или парковочного барьера вблизи машиноместа. На этапе 706 компонент 606 обнаружения движения определяет, что водитель или система вождения транспортного средства выезжает или готовится выезжать с машиноместа. На этапе 708 компонент 608 определения наличия извлекает указание наличия парковочного бордюра или парковочного барьера из памяти. На этапе 710 компонент 610 уведомления уведомляет водителя или автоматизированную систему вождения транспортного средства о наличии парковочного бордюра или парковочного барьера.
Примеры
[0054] Следующие далее примеры относятся к дополнительным вариантам осуществления.
[0055] Пример 1 представляет собой систему, которая включает в себя компонент обнаружения движения, компонент наличия и компонент уведомления. Компонент обнаружения движения выполнен с возможностью определения того, что транспортное средство или водитель выезжает или готовится выезжать с парковочного места. Компонент наличия выполнен с возможностью определения наличия парковочного барьера спереди или сзади парковочного места на основании базы данных истории движения. Компонент уведомления выполнен с возможностью обеспечения указания наличия парковочного барьера водителю или автоматизированной системе вождения транспортного средства.
[0056] В примере 2 компонент наличия примера 1 выполнен с возможностью определения наличия парковочного барьера в ответ на определение того, что транспортное средство в настоящее время припарковано на парковочном месте.
[0057] В примере 3 компонент уведомления в любом из примеров 1-2 выполнен с возможностью обеспечения одного или более из визуального указания и звукового указания о наличии парковочного барьера водителю.
[0058] В примере 4 компонент уведомления в любом из примеров 1-3 выполнен с возможностью обеспечения указания путем отправки сообщения автоматизированной системе вождения.
[0059] В примере 5 компонент уведомления в любом из примеров 1-4 дополнительно выполнен с возможностью обеспечения указания местоположения парковочного барьера.
[0060] В примере 6 компонент обнаружения движения в любом из примеров 1-5 выполнен с возможностью определения, что транспортное средство выезжает или готовится выезжать с парковочного места на основании одного или более событий: обнаружения входа человека в транспортное средство; обнаружения запуска транспортного средства; обнаружения наличия ключа в транспортном средстве; определения переключения транспортного средства на ведущую передачу или в режим движения; и приема указания от автоматизированной системы вождения о том, что автоматизированная система вождения готовится выезжать с парковочного места.
[0061] В примере 7 система любого из примеров 1-6 включает в себя один или более датчиков для получения данных об объектах вблизи транспортного средства, а компонент обнаружения барьера выполнен с возможностью обнаружения парковочного барьера при въезде транспортного средства или приближении транспортного средства к парковочному месту.
[0062] В примере 8 система примера 7 дополнительно включает в себя компонент истории движения, выполненный с возможностью обновления истории движения для включения указания наличия парковочного барьера.
[0063] В примере 9 датчики любого из примеров 7-8 имеют положение или поле обзора, которое не может захватывать области под или в пределах определенного диапазона от края транспортного средства.
[0064] Пример 10 представляет собой способ, который включает в себя этапы, на которых: обнаруживают наличие парковочного бордюра или парковочного барьера при въезде транспортного средства на машиноместо; сохраняют в памяти указание наличия парковочного бордюра вблизи машиноместа; определяют, что водитель или система вождения транспортного средства выезжает или готовится выезжать с машиноместа; и в ответ на определение, что транспортное средство собирается выезжать с машиноместа, извлекают указание наличия парковочного бордюра или парковочного барьера из памяти и уведомляют водителя или автоматизированную систему вождения транспортного средства о наличии парковочного бордюра или парковочного барьера.
[0065] В примере 11 определение, что водитель или система вождения транспортного средства выезжает или готовится выезжать с машиноместа в примере 10, включает в себя одно или более событий: обнаружения входа человека в транспортное средство; обнаружения запуска транспортного средства; обнаружения наличия ключа в транспортном средстве; определения переключения транспортного средства на ведущую передачу или в режим движения; и приема указания от автоматизированной системы вождения о том, что автоматизированная система вождения готовится выезжать с парковочного места.
[0066] В примере 12 указание наличия парковочного бордюра или парковочного барьера в любом из примеров 10-11 дополнительно включает в себя указание местоположения парковочного бордюра или парковочного барьера относительно транспортного средства.
[0067] В примере 13 уведомление водителя или автоматизированной системы вождения в любом из примеров 10-12 включает в себя уведомление водителя или автоматизированной системы вождения о местоположении парковочного бордюра или парковочного барьера относительно транспортного средства.
[0068] В примере 14 способ любого из примеров 10-13 включает в себя этап, на котором определяют, что транспортное средство в настоящее время припарковано на машиноместе.
[0069] В примере 15 уведомление водителя в любом из примеров 10-14 включает в себя обеспечение одного или более из визуального указания и аудио указания наличия парковочного бордюра или парковочного барьера водителю.
[0070] В примере 16 уведомление автоматизированной системы вождения в любом из примеров 10-15 включает в себя отправку сообщения автоматизированной системе вождения.
[0071] Пример 17 представляет собой считываемый компьютером носитель данных, хранящий инструкции, которые при исполнении одним или более процессорами побуждают процессоры: получать данные датчиков для объектов в области вблизи транспортного средства при въезде транспортного средства на парковочное место; обрабатывать данные датчиков для определения наличия парковочного барьера спереди или сзади парковочного места; обновлять историю движения для указания местоположения парковочного барьера; обнаруживать одно или более событий присутствия пользователя на водительском сиденье транспортного средства, переключения транспортного средства на ведущую передачу и запуска транспортного средства; уведомлять водителя или систему управления движением транспортного средства о наличии парковочного барьера спереди или сзади парковочного места.
[0072] В примере 18 обнаружение запуска транспортного средства в примере 17 включает в себя обнаружение одного или более из событий запуска двигателя транспортного средства и включения системы управления движением.
[0073] В примере 19 данные датчика в любом из примеров 17-18 не обеспечивают данные для области в пределах порогового расстояние от переднего или заднего бампера транспортного средства.
[0074] В примере 20 инструкции в любом из примеров 17-19 дополнительно побуждают процессор определять, что транспортное средство находится на парковочном месте в ответ на обнаружение одного или более событий присутствия пользователя на водительском сиденье транспортного средства, переключения транспортного средства на ведущую передачу и запуска транспортного средства.
[0075] Следует отметить, что рассмотренные выше варианты осуществления датчиков могут содержать компьютерное аппаратное обеспечение, программное обеспечение, микропрограммное обеспечение или любое их сочетание для выполнения по меньшей мере части их функций. Например, датчик может включать в себя компьютерный код, выполненный с возможностью выполнения в одном или более процессорах, и может включать в себя аппаратную логику/электрическую схему, управляемую компьютерным кодом. Эти примерные устройства обеспечены здесь в целях иллюстрации и не предназначены для ограничения. Варианты осуществления настоящего изобретения могут быть осуществлены в дополнительных типах устройств, которые должны быть известны специалисту в области техники.
[0076] Варианты осуществления изобретения направлены на компьютерные программные продукты, содержащие такую логику (например, в виде программного обеспечения), хранящуюся на любом используемом компьютером носителе. Такое программное обеспечение при выполнении в одном или более устройствах обработки данных побуждает устройство работать, как описано здесь.
[0077] Хотя различные варианты осуществления настоящего изобретения описаны выше, следует понимать, что они представлены исключительно путем примера, а не ограничения. Специалисту в области техники будет понятно, что различные изменения в форме и деталях могут быть выполнены без отклонения от замысла и объема охраны изобретения. Таким образом, широта трактовки и объем охраны настоящего изобретения не должны ограничиваться каким-либо из вышеописанных примерных вариантов осуществления, а должны быть определены только в соответствии со следующей далее формулой изобретения и ее эквивалентами. Вышеприведенное описание представлено в целях иллюстрации и описания. Оно не предназначено быть исчерпывающим или ограничивающим изобретение точной раскрытой формой. Многие модификации и изменения возможны в свете вышеописанных замыслов. Дополнительно, следует отметить, что любой или все из вышеупомянутых альтернативных вариантов осуществления могут использоваться в любом желаемом сочетании для образования дополнительных гибридных вариантов осуществления изобретения.
[0078] Дополнительно, хотя были описаны и проиллюстрированы конкретные варианты осуществления изобретения, изобретение не ограничивается конкретными формами или расположениями частей, которые описаны и проиллюстрированы. Объем охраны изобретения должен быть определен приложенной формулой изобретения, любыми будущими пунктами формулы изобретения, представленными здесь и в различных приложениях, и их эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ, СИСТЕМА И СЧИТЫВАЕМЫЕ КОМПЬЮТЕРОМ НОСИТЕЛИ ДЛЯ ИДЕНТИФИКАЦИИ УСТРОЙСТВА ДЛЯ ПРИЕМА ОГРАДИТЕЛЬНОГО СТОЛБИКА | 2017 |
|
RU2712732C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ НАЛИЧИЯ ПАРКОВКИ | 2017 |
|
RU2681963C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБМЕНА АТРИБУТАМИ ПУТИ ИЗ ПРЕДЫСТОРИИ ВОЖДЕНИЯ И КОМПОНЕНТ ПРОГНОЗИРОВАНИЯ ПУТИ | 2017 |
|
RU2681988C2 |
| СПОСОБ ОЦЕНКИ УЧАСТКА ДЛЯ ПАРКОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2670845C9 |
| СПОСОБ ПОСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА НА СТОЯНКУ И СИСТЕМА ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2014 |
|
RU2638587C2 |
| СПОСОБ, СИСТЕМА И МАШИНОЧИТАЕМЫЕ НОСИТЕЛИ ХРАНЕНИЯ ДАННЫХ ДЛЯ ОБНАРУЖЕНИЯ ЛИСТВЫ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ ДАЛЬНОСТИ | 2017 |
|
RU2707695C2 |
| СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ПОЕЗДКОЙ | 2017 |
|
RU2719063C2 |
| СИСТЕМЫ И СПОСОБЫ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ | 2018 |
|
RU2711817C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ ТРАНСПОРТНОГО СРЕДСТВА ДО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2014 |
|
RU2674636C2 |
| СИСТЕМА ПРЕДОСТАВЛЕНИЯ ПАРКОВОЧНОГО МЕСТА, СЕРВЕРНОЕ УСТРОЙСТВО И ЭНЕРГОНЕЗАВИСИМЫЙ НОСИТЕЛЬ ИНФОРМАЦИИ | 2021 |
|
RU2757561C1 |



Изобретение относится к системе предупреждения о парковочном барьере. Система предупреждения о парковочном барьере содержит компонент обнаружения движения, компонент определения наличия и компонент уведомления. Компонент обнаружения движения выполнен с возможностью определения, что транспортное средство или водитель выезжает или готовится выезжать с парковочного места. Компонент определения наличия выполнен с возможностью определения на основании базы данных истории движения, присутствует ли парковочный барьер на парковочном месте, причем компонент определения наличия определяет, присутствует ли парковочный барьер, в ответ на определение того, что транспортное средство или водитель выезжает или готовится выезжать с парковочного места. Компонент уведомления выполнен с возможностью обеспечения указания наличия парковочного барьера водителю или автоматизированной системе вождения транспортного средства. Достигается повышение безопасности управления транспортным средством. 3 н. и 17 з.п. ф-лы. 7 ил.
1. Система предупреждения о парковочном барьере, содержащая:
компонент обнаружения движения, выполненный с возможностью определения, что транспортное средство или водитель выезжает или готовится выезжать с парковочного места;
компонент определения наличия, выполненный с возможностью определения на основании базы данных истории движения, присутствует ли парковочный барьер на парковочном месте, причем компонент определения наличия определяет, присутствует ли парковочный барьер, в ответ на определение того, что транспортное средство или водитель выезжает или готовится выезжать с парковочного места; и
компонент уведомления, выполненный с возможностью обеспечения указания наличия парковочного барьера водителю или автоматизированной системе вождения транспортного средства.
2. Система по п. 1, в которой компонент определения наличия выполнен с возможностью определять, присутствует ли парковочный барьер, в ответ на определение того, что транспортное средство в настоящее время припарковано на парковочном месте.
3. Система по п. 1, в которой компонент уведомления выполнен с возможностью обеспечения одного или более из визуального указания и аудио указания наличия парковочного барьера водителю.
4. Система по п. 1, в которой компонент уведомления выполнен с возможностью обеспечения указания путем отправки сообщения автоматизированной системе вождения.
5. Система по п. 1, в которой компонент уведомления дополнительно выполнен с возможностью обеспечения указания местоположения парковочного барьера.
6. Система по п. 1, в которой компонент обнаружения движения выполнен с возможностью определения, что транспортное средство выезжает или готовится выезжать с парковочного места на основании одного или более из:
обнаружения входа человека в транспортное средство;
обнаружения запуска транспортного средства;
обнаружения наличия ключа в транспортном средстве;
определения переключения транспортного средства на ведущую передачу или в режим движения; и
приема указания от автоматизированной системы вождения о том, что автоматизированная система вождения готовится выезжать с парковочного места.
7. Система по п. 1, дополнительно содержащая один или более датчиков для получения данных об объектах вблизи транспортного средства и компонент обнаружения барьера, выполненный с возможностью обнаружения парковочного барьера при въезде транспортного средства или приближении транспортного средства к парковочному месту.
8. Система по п. 7, дополнительно содержащая компонент истории движения, выполненный с возможностью обновления истории движения для включения указания наличия парковочного барьера.
9. Система по п. 7, в которой датчики имеют положение или поле обзора, которое не может захватывать область под или в пределах определенного диапазона от края транспортного средства.
10. Способ предупреждения о парковочном барьере, содержащий этапы, на которых:
обнаруживают наличие парковочного барьера при въезде транспортного средства на машиноместо;
сохраняют в памяти указание наличия парковочного барьера вблизи машиноместа;
определяют, что водитель или автоматизированная система вождения транспортного средства выезжает или готовится выезжать с машиноместа; и
в ответ на определение, что транспортное средство собирается выезжать с машиноместа:
извлекают указание наличия парковочного барьера из памяти; и
уведомляют водителя или автоматизированную систему вождения транспортного средства о наличии парковочного барьера.
11. Способ по п. 10, в котором определение, что водитель или автоматизированная система вождения транспортного средства выезжает или готовится выезжать с машиноместа, содержит одно или более из:
обнаружения входа человека в транспортное средство;
обнаружения запуска транспортного средства;
обнаружения наличия ключа в транспортном средстве;
определения переключения транспортного средства на ведущую передачу или в режим движения; и
приема указания от автоматизированной системы вождения о том, что автоматизированная система вождения готовится выезжать с машиноместа.
12. Способ по п. 10, в котором указание наличия парковочного барьера дополнительно содержит указание местоположения парковочного барьера относительно транспортного средства.
13. Способ по п. 12, в котором уведомление водителя или автоматизированной системы вождения содержит уведомление водителя или автоматизированной системы вождения о местоположении парковочного барьера относительно транспортного средства.
14. Способ по п. 10, дополнительно содержащий этап, на котором определяют, что транспортное средство в настоящее время припарковано на машиноместе.
15. Способ по п. 10, в котором уведомление водителя содержит обеспечение одного или более из визуального указания и аудио указания наличия парковочного барьера водителю.
16. Способ по п. 10, в котором уведомление автоматизированной системы вождения содержит отправку сообщения автоматизированной системе вождения.
17. Считываемый компьютером носитель данных, хранящий инструкции, которые при исполнении одним или более процессорами предписывают процессору:
получать данные датчиков для множества объектов в области вблизи транспортного средства при въезде транспортного средства на парковочное место;
обрабатывать данные датчиков для определения наличия парковочного барьера спереди или сзади парковочного места;
обновлять историю движения для указания местоположения парковочного барьера;
обнаруживать одно или более из входа пользователя на водительское сиденье транспортного средства, переключения транспортного средства на ведущую передачу и запуска транспортного средства;
определять, что транспортное средство или водитель выезжает или готовится выезжать с парковочного места, в ответ на обнаружение одного или более из входа пользователя на водительское сиденье транспортного средства, переключения транспортного средства на ведущую передачу и запуска транспортного средства; и
уведомлять водителя или автоматизированную систему управления движением транспортного средства о наличии парковочного барьера спереди или сзади транспортного средства.
18. Считываемый компьютером носитель данных по п. 17, в котором обнаружение запуска транспортного средства содержит обнаружение одного или более из запуска двигателя транспортного средства и включения питания автоматизированной системы управления движением.
19. Считываемый компьютером носитель данных по п. 17, в котором данные датчиков не обеспечивают данные для области в пределах порогового расстояния от переднего или заднего бампера транспортного средства.
20. Считываемый компьютером носитель данных по п. 17, в котором инструкции дополнительно предписывают процессору определять, что транспортное средство находится на парковочном месте, в ответ на обнаружение одного или более из входа пользователя на водительское сиденье транспортного средства, переключения транспортного средства на ведущую передачу и запуска транспортного средства.
| US 20140347485 A1, 27.11.2014 | |||
| DE 102012211637 A1, 09.01.2014 | |||
| RU 2014107925 A, 10.09.2015. |

