Изобретение относится к области радиолокации и может быть использовано в наземных радиолокационных станциях (РЛС) для определения вертикальной скорости (вертикальной составляющей вектора скорости) баллистической цели (БЦ) в середине интервала наблюдения на невозмущенном пассивном участке (ПУТ) баллистической траектории.
Известны способы и устройства определения вертикальной скорости  путем оптимального взвешенного суммирования с помощью цифрового нерекурсивного фильтра (ЦНРФ) фиксированной выборки значений высоты БЦ, вычисляемых по формуле zi=ri sin εi, где ri и εi - измеренные значения дальности и угла места. Наименьшие средне-квадратические ошибки (СКО) достигаются при оценивании вертикальной скорости
путем оптимального взвешенного суммирования с помощью цифрового нерекурсивного фильтра (ЦНРФ) фиксированной выборки значений высоты БЦ, вычисляемых по формуле zi=ri sin εi, где ri и εi - измеренные значения дальности и угла места. Наименьшие средне-квадратические ошибки (СКО) достигаются при оценивании вертикальной скорости  в середине интервала наблюдения по выборке из N значений высоты [1, С. 301-304]:
в середине интервала наблюдения по выборке из N значений высоты [1, С. 301-304]:

где  - весовые коэффициенты оценивания первого приращения;
- весовые коэффициенты оценивания первого приращения;
Т0 - период обзора РЛС.
Известны способы и устройства определения вертикальной скорости с помощью α, β фильтра или α, β, γ фильтра путем последовательного оптимального сглаживания выборки значений высоты нарастающего объема [2, С. 321-322].
Основными недостатками этих способов и устройств является низкая точность определения вертикальной скорости в РЛС с большими ошибками измерениями угла места, в частности в РЛС метрового диапазона волн (РЛС МДВ), а также появление методических ошибок оценивания вертикальной скорости при больших дальностях до БЦ из-за неучета кривизны Земли.
Известны способы и устройства определения вертикальной скорости с использованием измерений или оценок радиальной скорости  и скорости изменения угла места
и скорости изменения угла места  [3, С. 64-65]:
[3, С. 64-65]:

В этих способах оценки радиальной скорости и оценки скорости изменения угла места определяются путем оптимального сглаживания выборок измерений дальности ri и угла места εi с помощью ЦНРФ, α, β или α, β, γ фильтров.
Основными недостатками этих способов и устройств является низкая точность определения вертикальной скорости в РЛС с большими ошибками измерениями угла места, а также появление методических ошибок оценивания вертикальной скорости при больших дальностях до БЦ из-за неучета кривизны Земли и из-за неоднозначности измерений радиальной скорости.
Наиболее близким аналогом (прототипом) заявленного изобретения являются способ и устройство радиолокационного определения вертикальной скорости БЦ с использованием фиксированной выборки произведений дальности на радиальную скорость, описанный в патенте 2646854 [4].
Физическая сущность аналогов, прототипа и заявляемого изобретения поясняется чертежом баллистической траектории, приведенным в фиг. 1, где использованы следующие обозначения:
- АС - интервал наблюдения;
- В - середина интервала наблюдения;
- ОЕ - поверхность Земли;
- Rз=FD - радиус Земли;
- BF- удаление БЦ в середине интервала сглаживания от центра Земли;
- ПУТ - пассивный участок траектории;
- АУТ - активный участок траектории;
- ϕ1, ϕcp, ϕN - геоцентрические углы между РЛС и БЦ в начале, в середине и в конце интервала наблюдения;
- r1, rcp, rN - дальность до БЦ в начале, в середине и в конце интервала наблюдения;
-  - радиальная скорость БЦ в начале, в середине и в конце интервала наблюдения;
- радиальная скорость БЦ в начале, в середине и в конце интервала наблюдения;
- ε1, εcp, εN - углы места БЦ в начале, в середине и в конце интервала наблюдения;
- zcp=rcp sin εср - высота БЦ в середине интервала наблюдения.
-  - вертикальная скорость БЦ в середине интервала наблюдения в геоцентрической системе координат;
- вертикальная скорость БЦ в середине интервала наблюдения в геоцентрической системе координат;
-  - вертикальная скорость БЦ в середине интервала наблюдения в местной системе координат РЛС;
- вертикальная скорость БЦ в середине интервала наблюдения в местной системе координат РЛС;
- qcp - ускорение силы тяжести в середине интервала наблюдения;
- Vcp - модуль вектора скорости БЦ в середине интервала наблюдения;
- θcp - угол наклона вектора скорости БЦ к местному горизонту в середине интервала наблюдения.
Для пояснения сущности способа-прототипа в фиг. 2 приведена структурная схема устройства его реализации.
В РЛС через одинаковые промежутки времени, равные периоду обзора Т0, измеряют дальность ri, радиальную скорость  и угол места εi БЦ на интервале наблюдения АС, находящемся на пассивном участке баллистической траектории (ПУТ). Далее в блоке преобразования измерений радиальной скорости (блок 1) перемножают измерения дальности и измерения радиальной скорости и получают произведения дальности на радиальную скорость (ПДРС)
и угол места εi БЦ на интервале наблюдения АС, находящемся на пассивном участке баллистической траектории (ПУТ). Далее в блоке преобразования измерений радиальной скорости (блок 1) перемножают измерения дальности и измерения радиальной скорости и получают произведения дальности на радиальную скорость (ПДРС)  .
.
Сигналы ПДРС подают на вход запоминающего устройства (ЗУ блок 2.1) ЦНРФ оценивания второго приращения (блок 2), на выходе которого получают фиксированную выборку этих сигналов. В блоке реализации весовой функции (блок 2.2) фиксированную выборку сигналов ПДРС умножают на вычисленные или запомненные весовые коэффициенты  оценивания второго приращения.
оценивания второго приращения.
После суммирования фиксированной выборки взвешенных коэффициентами  сигналов ПДРС в сумматоре 2.3 получают оценку второго приращения произведения дальности на радиальную скорость
сигналов ПДРС в сумматоре 2.3 получают оценку второго приращения произведения дальности на радиальную скорость  , которую подают на первый вход вычислителя вертикальной скорости БЦ в середине интервала наблюдения (блок 3).
, которую подают на первый вход вычислителя вертикальной скорости БЦ в середине интервала наблюдения (блок 3).
В вычислителе геоцентрических углов (блок 4) по измерениям дальности и угла места вычисляют геоцентрические углы между РЛС и БЦ в начале интервала наблюдения  , между РЛС и БЦ в середине интервала наблюдения
, между РЛС и БЦ в середине интервала наблюдения  и между РЛС и БЦ в конце интервала наблюдения
и между РЛС и БЦ в конце интервала наблюдения  где R3 - радиус Земли.
где R3 - радиус Земли.
Далее в вычислителе ускорения силы тяжести (блок 5) по измеренным значениям дальности rcp и угла места εср, а также по вычисленным значением ϕср вычисляют ускорение силы тяжести в середине интервала наблюдения по формуле:  где q0 - ускорение силы тяжести на поверхности Земли.
где q0 - ускорение силы тяжести на поверхности Земли.
В итоге, по оценке второго приращения ПДРС  , по вычисленным значениям геоцентрических углов ϕ1, ϕ2, ϕN и ускорения силы тяжести qcp вычисляют в блоке 3 оценку, то есть сглаженное значение, вертикальной скорости БЦ в середине интервала наблюдения на невозмущенном пассивном участке траектории, по формуле:
, по вычисленным значениям геоцентрических углов ϕ1, ϕ2, ϕN и ускорения силы тяжести qcp вычисляют в блоке 3 оценку, то есть сглаженное значение, вертикальной скорости БЦ в середине интервала наблюдения на невозмущенном пассивном участке траектории, по формуле:

Устройство реализации способа-прототипа содержит последовательно соединенные блок преобразования измерений радиальной скорости (блок 1), ЦНРФ оценивания второго приращения (блок 2), состоящий из последовательно соединенных запоминающего устройства (блок 2.1), блока реализации весовой функции (блок 2.2) и сумматора (блок 2.3), а также вычислитель вертикальной скорости БЦ в середине интервала наблюдения (блок 3). Ко второму входу блока 3 подключен вычислитель ускорения силы тяжести (блок 5), три первых входа которого соединены с соответствующими выходами вычислителя геоцентрических углов (блок 4), третий, четвертый и пятый выходы которого подключены к одноименным входам блока 3. На входы блока 4 подают результаты измерений дальности и угла места. Выход блока 3 является выходом устройства-прототипа.
Достоинство способа-прототипа: снижено влияние ошибок измерения угла места и дальности, а также устранено влияние ошибок измерения азимута на точность определения вертикальной скорости БЦ при относительно высокоточных и однозначных измерениях радиальной скорости.
Недостаток способа-прототипа: невозможность определения вертикальной скорости БЦ при неоднозначных измерениях ее радиальной скорости.
Техническим результатом заявленного изобретения является повышение точности определения вертикальной скорости БЦ за счет устранении неоднозначности измерений ее радиальной скорости, а также в расширении арсенала технических средств, то есть способов и устройств, определения вертикальной скорости объектов, движущихся по невозмущенной баллистической траектории.
Указанный технический результат достигается тем, что в заявленном изобретении устраняют неоднозначность измерений радиальной скорости, а также используют оценки первого и второго приращений радиальной скорости.
Причина неоднозначности измерений радиальной скорости заключается в том, что используемая в РЛС когерентная последовательность излучаемых высокочастотных зондирующих импульсов имеет дискретный спектр, отдельные составляющие которого отстоят друг от друга на величину, равную частоте повторения (следования) Fn этих импульсов. Поэтому максимальная доплеровская частота, которую можно однозначно измерить, равна половине частоты повторения импульсов, то есть  . Следовательно, максимальная однозначно измеряемая радиальная скорость равна произведению четверти длины волны Я РЛС на частоту повторения:
. Следовательно, максимальная однозначно измеряемая радиальная скорость равна произведению четверти длины волны Я РЛС на частоту повторения:  [5. С. 297-298]. Так как длина волны равна скорости распространения электромагнитной волны с, деленной на несущую частоту
[5. С. 297-298]. Так как длина волны равна скорости распространения электромагнитной волны с, деленной на несущую частоту  РЛС, то максимальная однозначно измеряемая радиальная скорость вычисляется по формуле:
РЛС, то максимальная однозначно измеряемая радиальная скорость вычисляется по формуле:

Поэтому радиальная скорость  однозначно измеряется в интервале
однозначно измеряется в интервале
то есть в окрестности центральной составляющей спектра. Для других составляющих спектра истинная радиальная скорость  равна сумме измеренной радиальной скорости
равна сумме измеренной радиальной скорости  и произведения номера спектральной составляющей Mi на
и произведения номера спектральной составляющей Mi на 
Номер спектральной составляющей называют также коэффициентом неоднозначности Mi, который равен целому числу значений  содержащихся в i-й истинной радиальной скорости:
содержащихся в i-й истинной радиальной скорости:
где  - операция вычисления целого числа.
- операция вычисления целого числа.
В первом варианте предлагаемого изобретения несущая частота  и частота повторения импульсов Fn в РЛС установлены таким образом, что одновременно достигается однозначное измерение дальности и радиальной скорости.
и частота повторения импульсов Fn в РЛС установлены таким образом, что одновременно достигается однозначное измерение дальности и радиальной скорости.
Для пояснения сущности первого варианта в фиг. 3 приведена структурная схема устройства его реализации.
В первом варианте предлагаемого способа так же, как в способе-прототипе, в РЛС через интервалы времени, равные периоду обзора Т0, измеряют дальность ri, радиальную скорость  и угол места БЦ и преобразуют их в цифровые сигналы.
и угол места БЦ и преобразуют их в цифровые сигналы.
По измерениям дальности и угла места в блоке 4 вычисляют геоцентрические углы<р1 между РЛС и БЦ в начале интервала наблюдения, ϕср между РЛС и БЦ в середине интервала наблюдения и q>N между РЛС и БЦ в конце интервала наблюдения, а также в блоке 5 вычисляют ускорение силы тяжести qcp в середине интервала наблюдения.
В отличие от способа-прототипа, в соответствии с заявленным изобретением, преобразованные в блоке 1 цифровые сигналы радиальной скорости  используют в ЦНРФ (блок 2) для оценивания второго приращения
используют в ЦНРФ (блок 2) для оценивания второго приращения  радиальной скорости, а во втором ЦНРФ (блок 6) для оценивания первого приращения
радиальной скорости, а во втором ЦНРФ (блок 6) для оценивания первого приращения  радиальной скорости в середине интервала наблюдения.
радиальной скорости в середине интервала наблюдения.
В итоге в блоке 3 по полученным оценкам первого  и второго
и второго  приращений радиальной скорости, по вычисленным значениям ускорения силы тяжести qcp и геоцентрических углов ϕ1, ϕcp ϕN, а также по измеренным значениям дальности rcp до БЦ и ее радиальной скорости
приращений радиальной скорости, по вычисленным значениям ускорения силы тяжести qcp и геоцентрических углов ϕ1, ϕcp ϕN, а также по измеренным значениям дальности rcp до БЦ и ее радиальной скорости  в середине интервала наблюдения вычисляют значение вертикальной скорости БЦ в середине интервала наблюдения на невозмущенном пассивном участке баллистической траектории по формуле:
в середине интервала наблюдения вычисляют значение вертикальной скорости БЦ в середине интервала наблюдения на невозмущенном пассивном участке баллистической траектории по формуле:

В формуле (5) второе слагаемое является поправкой на кривизну Земли.
Так как все типы цифровых нерекурсивных фильтров устроены одинаково, то есть содержат последовательно соединенные запоминающее устройство, блок реализации весовой функции и сумматор, и отличаются только входными сигналами и весовыми коэффициентами, в дальнейших схемах и описаниях пунктов формулы изобретения структура ЦНРФ не будет раскрываться.
Первый вариант заявленного устройства определения вертикальной скорости так же, как устройство-прототип, содержит последовательно соединенные блок преобразования измерений радиальной скорости (блок 1), ЦНРФ оценивания второго приращения (блок 2) и вычислитель вертикальной скорости БЦ в середине интервала наблюдения (блок 3). Ко второму входу блока 3 подключен вычислитель ускорения силы тяжести (блок 5), три первых входа которого соединены с соответствующими выходами вычислителя геоцентрических углов (блок 4), третий, четвертый и пятый выходы которого подключены к одноименным входам блока 3. На входы блока 4 подают результаты измерений дальности и угла места. Выход блока 3 является выходом заявленного устройства.
В отличие от устройства - прототипа, в соответствии с заявленным изобретением, к шестому входу блока 3 подключен дополнительно введенный ЦНРФ оценивания первого приращения радиальной скорости (блок 6), на входы блока 2 и блока 6 подают преобразованные в блоке 1 цифровые сигналы радиальной скорости. Первый выход блока 4 подключен к восьмому входу блока 3, на седьмой вход которого подают значения радиальной скорости, измеренные в середине интервала наблюдения.
Для доказательства практического отсутствия систематических (методических) ошибок и для анализа точности оценивания вертикальной скорости при однозначных измерениях радиальной скорости вычислим значение вертикальной скорости баллистической ракеты (БР) «Атакмс» с дальностью полета 125 км, летящей по навесной траектории.
Интервал наблюдения длительностью 30 с (N=7, Т0=5 с) находится на восходящем участке траектории. Параметры ракеты в середине интервала наблюдения на 65-й секунде ее полета: вертикальная скорость  , модуль скорости
, модуль скорости  угол наклона θср=55,69°, ускорение силы тяжести
угол наклона θср=55,69°, ускорение силы тяжести  .
.
Из-за малых дальностей до БЦ кривизну Земли можно не учитывать.
Принимаются следующие характеристики РЛС «Резонанс-Н»: несущая частота  =75 Мгц, частота повторения импульсов Fn=200 Гц, СКО измерения радиальной скорости
=75 Мгц, частота повторения импульсов Fn=200 Гц, СКО измерения радиальной скорости  , угла места σε=1,5°, дальности σr - 300 м [6, С. 18-22].
, угла места σε=1,5°, дальности σr - 300 м [6, С. 18-22].
Дальность и радиальная скорость ракеты измеряются на интервале наблюдения с одинаковой точностью, без пропусков. Поэтому весовые коэффициенты вычислялись по формулам:  и
и  [7, С. 151,155].
[7, С. 151,155].
Исходные данные для проведения расчетов приведены в табл. 1.
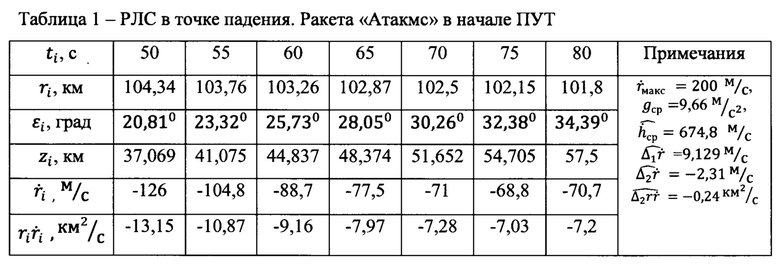
Как видно из табл. 1, радиальные скорости измеряются однозначно, так как их абсолютные значения не превышают 200 м/с, то есть 
При фиксированных выборках из семи измерений (N=7) оценки первого и второго приращений радиальной скорости и первого приращения ПДРС вычисляются по формулам:



В итоге в заявленном изобретении вертикальная скорости БЦ определяется практически без смещения (-3 м/с):

В устройствах, использующих способ - прототип, вертикальная скорость БЦ также определяется практически без смещения  при однозначных измерениях радиальной скорости:
при однозначных измерениях радиальной скорости:

В устройствах реализации способов - аналогов смещения вертикальной скорости увеличиваются в несколько раз.


Случайные СКО оценивания вертикальной скорости в аналогах зависят практически только от погрешностей измерения угла места:
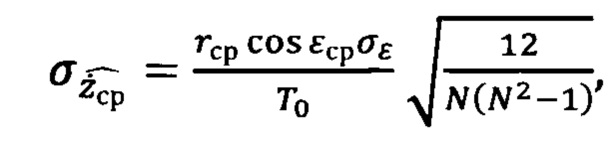
где σε - СКО измерения угла места [1, С. 308].
В приведенном примере для аналогов СКО  в РЛС «Резонанс-Н».
в РЛС «Резонанс-Н».
В заявленном изобретении и в прототипе СКО оценивания вертикальной скорости зависит от ошибок измерения радиальной скорости и вычисляется по формуле:
Для РЛС «Резонанс-Н» СКО будет в два раза меньше, чем в аналогах: 
С увеличением длительности во времени интервала наблюдения, то есть (N-1)T0, этот выигрыш в точности будет возрастать.
Однако при полете ракеты по оптимальным и настильным траекториям на дальности до нескольких сотен и тысяч километров ее радиальные скорости могут достигать значений до нескольких тысяч метров в секунду. В этих случаях оценивание вертикальной скорости заявляемым способом и способом-прототипом без устранения или разрешения неоднозначности радиальной скорости становится невозможным.
Как видно из формулы (5), неоднозначность радиальной скорости необходимо устранять при оценивании первого  и второго
и второго  приращений радиальной скорости, а также при определении однозначной радиальной скорости в середине интервала наблюдения.
приращений радиальной скорости, а также при определении однозначной радиальной скорости в середине интервала наблюдения.
Второй вариант заявленного изобретения является дальнейшим развитием первого варианта.
Во втором варианте заявленного изобретения, в отличие от первого варианта, устраняют неоднозначность радиальной скорости.
Структурная схема реализации второго варианта заявленного способа приведена в фиг. 4.
Для этого оценивают однозначную радиальную скорость в середине интервала наблюдения  путем оптимального взвешенного суммирования фиксированной выборки измерений дальности ri с помощью ЦНРФ (блок 7) и деления полученной оценки первого приращения дальности
путем оптимального взвешенного суммирования фиксированной выборки измерений дальности ri с помощью ЦНРФ (блок 7) и деления полученной оценки первого приращения дальности  на период обзора в блоке 8:
на период обзора в блоке 8:

При оценивании первого  и второго
и второго  приращений радиальной скорости производят преобразование измерений радиальной скорости в блоке 1 по следующей методике.
приращений радиальной скорости производят преобразование измерений радиальной скорости в блоке 1 по следующей методике.
Для этого сначала оценивают второе приращение дальности  путем оптимального взвешенного суммирования фиксированной выборки из N измеренных значений дальности с помощью ЦНРФ (блок 10).
путем оптимального взвешенного суммирования фиксированной выборки из N измеренных значений дальности с помощью ЦНРФ (блок 10).
Далее измеряют несущую частоту  высокочастотных импульсов передающего устройства РЛС и частоту их повторения FП, затем вычисляют в блоке 9 максимальную однозначно измеряемую радиальную скорость
высокочастотных импульсов передающего устройства РЛС и частоту их повторения FП, затем вычисляют в блоке 9 максимальную однозначно измеряемую радиальную скорость  по формуле (4).
по формуле (4).
Одновременно вычисляют межобзорные разности  , то есть разности между измеренными в соседних обзорах значениями радиальной скорости в блоке 1.1:
, то есть разности между измеренными в соседних обзорах значениями радиальной скорости в блоке 1.1:

Далее в блоке 1.2 с помощью межобзорной разности  , оценки второго приращения дальности
, оценки второго приращения дальности  и максимальной однозначно измеряемой радиальной скорости
и максимальной однозначно измеряемой радиальной скорости  определяют межобзорные коэффициенты неоднозначности mi; радиальной скорости по следующему правилу.
определяют межобзорные коэффициенты неоднозначности mi; радиальной скорости по следующему правилу.
Если оценка  положительна, то есть
положительна, то есть  , то межобзорный коэффициент неоднозначности в конце интервала наблюдения приравнивают к нулю, то есть mN=0.
, то межобзорный коэффициент неоднозначности в конце интервала наблюдения приравнивают к нулю, то есть mN=0.
Далее в каждом обзоре, начиная с предпоследнего (N-1) обзора, сравнивают абсолютные значения межобзорных разностей  с максимальной однозначно измеряемой радиальной скоростью
с максимальной однозначно измеряемой радиальной скоростью  вычисляемой в блоке 9. Если абсолютное значение межобзорной разности меньше половины
вычисляемой в блоке 9. Если абсолютное значение межобзорной разности меньше половины  , то межобзорные коэффициенты неоднозначности в текущем i-м и в предыдущем (i-1)-м обзорах считают одинаковыми, то есть
, то межобзорные коэффициенты неоднозначности в текущем i-м и в предыдущем (i-1)-м обзорах считают одинаковыми, то есть  Если абсолютное значение межобзорной разности больше половины
Если абсолютное значение межобзорной разности больше половины  то к межобзорному коэффициенту неоднозначности предыдущего обзора прибавляют единицу, то есть
то к межобзорному коэффициенту неоднозначности предыдущего обзора прибавляют единицу, то есть 
Если оценка  отрицательна, то есть
отрицательна, то есть  то межобзорный коэффициент неоднозначности в начале интервала наблюдения приравнивают к нулю, то есть m1=0.
то межобзорный коэффициент неоднозначности в начале интервала наблюдения приравнивают к нулю, то есть m1=0.
Далее в каждом обзоре, начиная со второго обзора, сравнивают абсолютные значения межобзорных разностей  с максимальной измеряемой радиальной скоростью
с максимальной измеряемой радиальной скоростью  Если абсолютное значение межобзорной разности меньше половины
Если абсолютное значение межобзорной разности меньше половины  то
то 
 Если абсолютное значение межобзорной разности больше половины
Если абсолютное значение межобзорной разности больше половины  , то
, то 
Таким образом, межобзорные коэффициенты неоднозначности в соседних обзорах в общем виде вычисляют по формуле:
В итоге с использованием значений  в блоке 1.3 вычисляют преобразованные на интервале наблюдения радиальные скорости
в блоке 1.3 вычисляют преобразованные на интервале наблюдения радиальные скорости  по формуле:
по формуле:

Физический смысл формул (7)-(9) заключается в том, что при совпадении знаков  и
и  БЦ находится на участке разгона, то есть на нисходящей ветви баллистической траектории. Если знаки
БЦ находится на участке разгона, то есть на нисходящей ветви баллистической траектории. Если знаки  и
и  противоположны, то БЦ находится на участке торможения, то есть на восходящей ветви траектории.
противоположны, то БЦ находится на участке торможения, то есть на восходящей ветви траектории.
Далее в блоках 6 и 7 путем оптимального взвешенного суммирования фиксированных выборок значений преобразованной радиальной скорости с помощью ЦНРФ определяют оценки первого и второго  приращений радиальной скорости.
приращений радиальной скорости.
В итоге по полученным оценкам первого и второго  приращений радиальной скорости, а также по оценкам радиальной скорости
приращений радиальной скорости, а также по оценкам радиальной скорости  в середине интервала наблюдения, вычисленным значениям ускорения силы тяжести qcp и геоцентрических углов ϕ1, ϕcp ϕN, а также по измеренным значениям дальности rcp до БЦ вычисляют значение вертикальной скорости БЦ в середине интервала наблюдения на невозмущенном пассивном участке баллистической траектории по формуле:
в середине интервала наблюдения, вычисленным значениям ускорения силы тяжести qcp и геоцентрических углов ϕ1, ϕcp ϕN, а также по измеренным значениям дальности rcp до БЦ вычисляют значение вертикальной скорости БЦ в середине интервала наблюдения на невозмущенном пассивном участке баллистической траектории по формуле:

Для доказательства эффективности предлагаемого варианта вычислим вертикальную скорость БР «Нодон» с дальностью полета 1025 км, летящей по оптимальной траектории. Исходные данные приведены в таблице 2.
Во втором варианте заявленного изобретения вертикальная скорость определяется практически без смещения 

В прототипе при неоднозначной радиальной скорости вертикальная скорость не определяется. Это объясняется тем, что оценка второго приращения положительна  а вычисленная по формуле (3) вертикальная скорость отрицательна:
а вычисленная по формуле (3) вертикальная скорость отрицательна: 
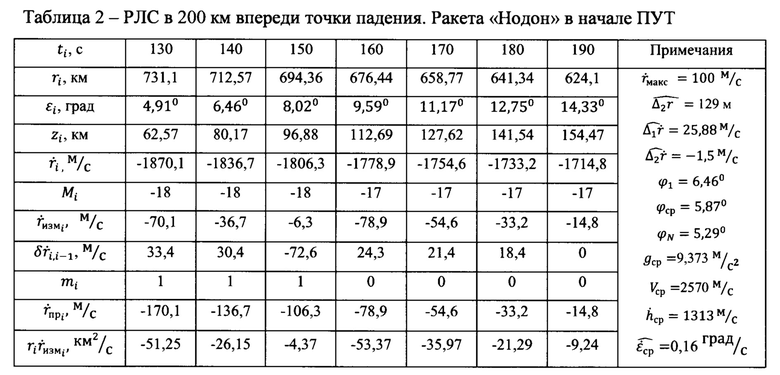
В способах-аналогах вертикальная скорость вычисляется с большим положительным смещением 


В заявленном изобретении СКО оценивания вертикальной скорости в РЛС «Резонанс-Н» не превышает 6% от ее значения  а в аналогах СКО больше в четыре раза
а в аналогах СКО больше в четыре раза 
Во втором варианте устройства оценивания модуля скорости БЦ, в отличие от первого варианта, в соответствии с заявленным изобретением, в состав блока преобразования измерений радиальной скорости (блок 1) входят дополнительно введенные, последовательно соединенные вычислитель разности измерений радиальной скорости в соседних обзорах (блок 1.1), вычислитель межобзорного коэффициента неоднозначности (блок 1.2) и вычислитель преобразованной радиальной скорости (блок 1.3). Вторые входы блока 1.2 и блока 1.3 соединены с выходом дополнительно введенного вычислителя максимальной измеряемой радиальной скорости (блок 9), на входы которого подают измеренные значения несущей частоты высокочастотных импульсов передающего устройства РЛС и частоты их повторения. Третий вход блока 1.2 подключен к выходу дополнительно введенного ЦНРФ оценивания второго приращения дальности (блок 10), на вход которого подают измеренные значения дальности. К седьмому входу блока 3 подключены дополнительно введенные, последовательно соединенные делитель на период обзора (блок 8) и ЦНРФ оценивания первого приращения дальности в середине интервала наблюдения, на вход которого подают измеренные значения дальности до БЦ.
Таким образом, достоинство второго варианта изобретения: устранена неоднозначность измерения радиальной скорости.
Недостаток третьего варианта: низкая защищенность РЛС от воздействия преднамеренных и непреднамеренных активных помех из-за невозможности перестройка несущей частоты  передающего устройства.
передающего устройства.
Третий вариант заявленного способа определения модуля скорости БЦ является дальнейшим развитием второго варианта.
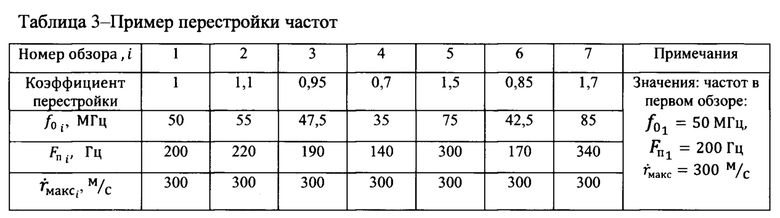
В третьем варианте заявленного способа, в отличие от второго варианта, во всех или в части обзоров на интервале наблюдения осуществляют одновременную перестройку несущей частоты высокочастотных импульсов передающего устройства РЛС и частоты их повторения таким образом, чтобы максимальная измеряемая радиальная скорость  оставалась постоянной. Для этого несущую частоту
оставалась постоянной. Для этого несущую частоту  и частоту повторения
и частоту повторения  , измеренные в начале интервала наблюдения, одновременно увеличивают или уменьшают в одинаковое число раз в обзорах, где осуществляется перестройка частот.
, измеренные в начале интервала наблюдения, одновременно увеличивают или уменьшают в одинаковое число раз в обзорах, где осуществляется перестройка частот.
Пример перестройки несущей частоты и частоты повторения в РЛС типа «Резонанс-Н» приведен в табл. 3.
Эти частоты одновременно умножают на коэффициенты перестройки. Если эти коэффициенты больше единицы, то частоты увеличиваются, если меньше единицы, то уменьшаются.
Как видно из таблицы, при перестройке несущей частоты в диапазоне от 35 до 85 МГц, а частоты повторения - в диапазоне от 140 до 340 Гц максимальная измеряемая радиальная скорость остается постоянной  за счет чего устраняется неоднозначность измерений радиальной скорости.
за счет чего устраняется неоднозначность измерений радиальной скорости.
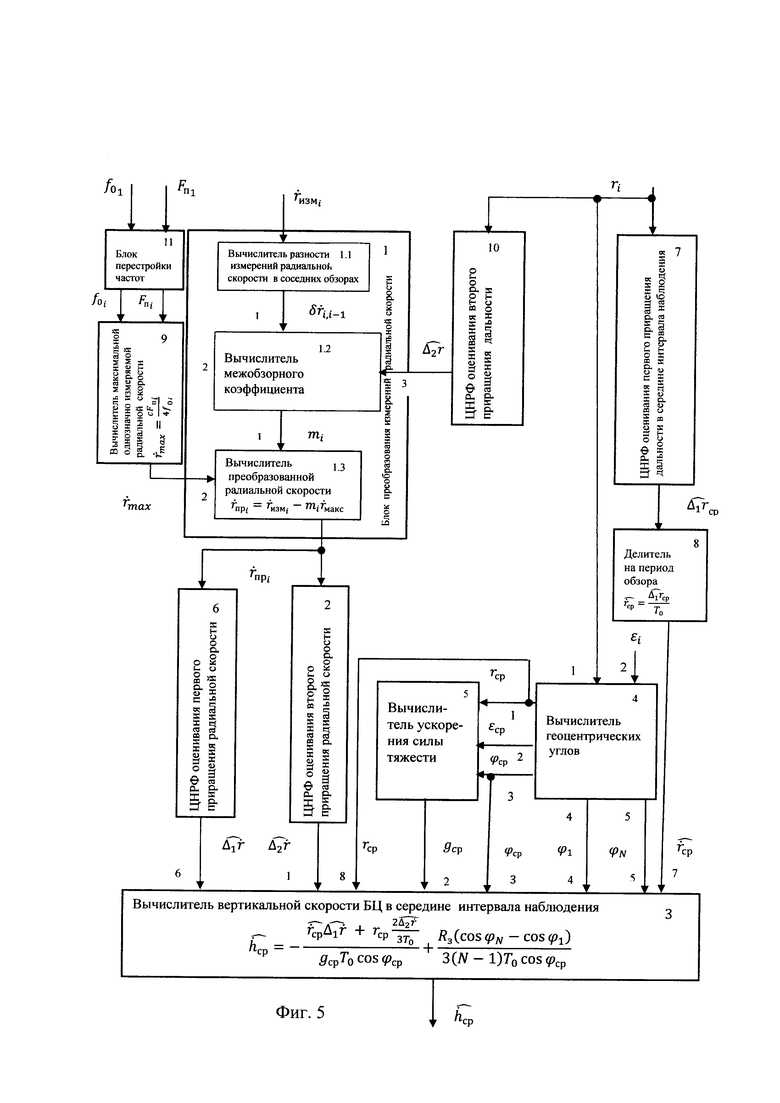
В третьем варианте заявленного устройства, в отличие от второго варианта, входы вычислителя максимальной измеряемой радиальной скорости (блок 9) подключены к соответствующим выходам дополнительно введенного блока перестройки частот (блок 11). Структурная схема этого варианта приведена в фиг. 5.
Таким образом, дополнительным достоинством третьего варианта изобретения: является повышение помехозащищенности РЛС за счет перестройки ее несущей частоты.
Недостаток второго и третьего вариантов: среднеквадратические ошибки оценивания радиальной скорости БЦ  по выборкам измерений дальности существенно больше СКО измерения радиальной скорости
по выборкам измерений дальности существенно больше СКО измерения радиальной скорости  доплеровским методом.
доплеровским методом.
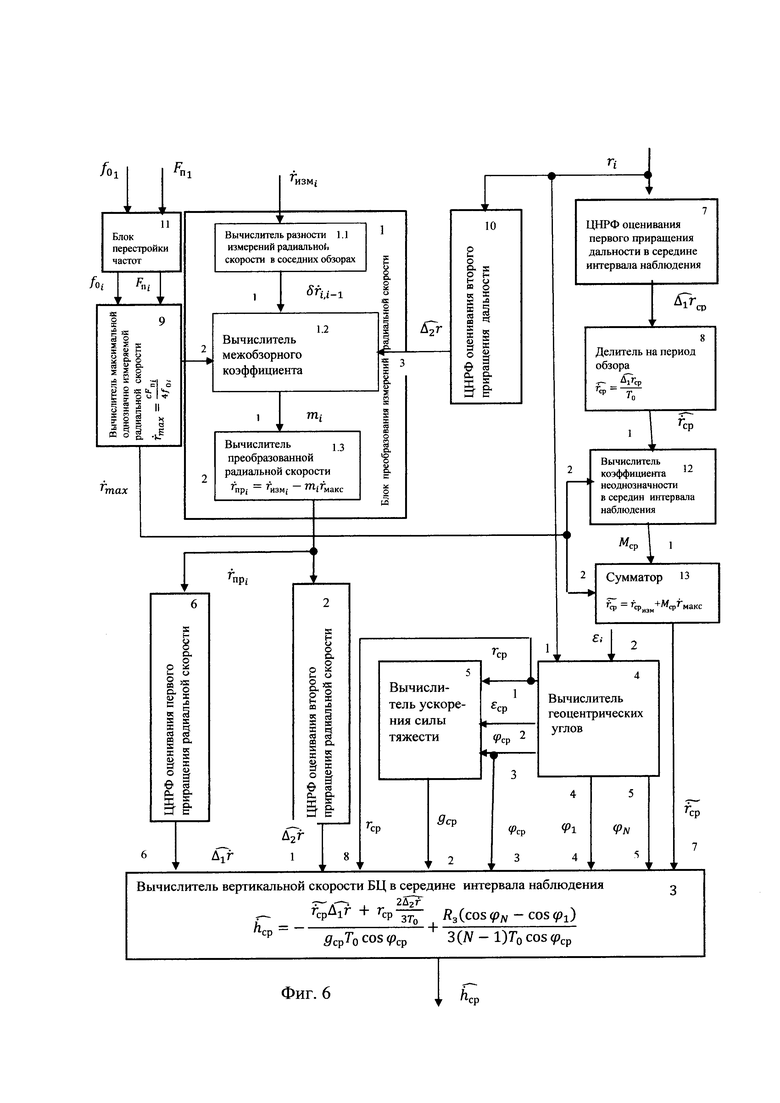
Четвертый вариант заявленного изобретения является дальнейшим развитием второго и третьего вариантов. Структурная схема устройства реализации этого варианта приведена в фиг. 5.
В четвертом варианте заявленного изобретения, в отличие от второго и третьего вариантов, уменьшают ошибки определения истинной радиальной скорости в середине интервала наблюдения.
Для этого сначала в блоке 12 вычисляют коэффициент неоднозначности радиальной скорости в середине интервала наблюдения Мср путем деления оценки радиальной скорости в середине интервала наблюдения  , определяемой в блоках 7 и 8 путем взвешенного суммирования выборки измерений дальности, на значение максимальной измеряемой радиальной скорости:
, определяемой в блоках 7 и 8 путем взвешенного суммирования выборки измерений дальности, на значение максимальной измеряемой радиальной скорости:

где  - операция вычисления целого числа.
- операция вычисления целого числа.
Далее с использованием реальных высокоточных измерений радиальной скорости в блоке 13 однозначно вычисляют истинную радиальную скорость БЦ в середине интервала наблюдения по формуле:

Например, СКО оценивания радиальной скорости  по выборке из семи измерений дальности при Т0=5 с, вычисляемая по формуле:
по выборке из семи измерений дальности при Т0=5 с, вычисляемая по формуле:

более, чем в 7,5 раз, превышает СКО измерения радиальной скорости в РЛС «Резонанс-Н» 
В итоге погрешности определения радиальной скорость БЦ в середине интервала наблюдения становятся соизмеримыми с СКО измерения радиальной скорости 
В четвертом варианте заявленного устройства определения модуля скорости БЦ, в отличие от второго и третьего вариантов, выход делителя на период обзора (блок 8) соединен с входом дополнительно введенных, последовательно соединенных вычислителя коэффициента неоднозначности в середине интервала наблюдения (блок 12) и сумматора (блок 13), выход которого подключен к седьмому входу блока 3. Кроме того, вторые входы блоков 12 и 13 подключены к выходу блока 9, а на третий вход сумматора (блок 13) подают значение радиальной скорости, измеренное в середине интервала наблюдения.
Таким образом, доказана реализуемость заявленного технического результата изобретения, а именно: повышена точность определения вертикальной скорости БЦ за счет устранения неоднозначности измерений ее радиальной скорости, в том числе при перестройке несущей частоты и частоты повторения зондирующих импульсов РЛС, а также расширяется арсенал технических средств определения вертикальной скорости баллистических целей в середине интервала наблюдения, находящегося на невозмущенной баллистической траектории, за счет использования оценок их радиального ускорения.
Список использованных источников
1. Кузьмин С.З. Цифровая обработка радиолокационной информации. М: «Советское радио», 1967, 400 с.
2. Кузьмин С.З. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации - М: Сов. радио, 1974. - 432 с.
3. Шапиро И. Расчет траекторий баллистических снарядов по данным радиолокационных измерений / Пер. с англ. Под ред. Ю.Г. Мильграма - М.:, Изд. иностранной литературы, 1961 - 310 с.
4. Патент 2646854 от 21.01.2018. Способ радиолокационного определения вертикальной скорости баллистического объекта и устройство для его реализации.
5. Основы радионавигационных измерений / В.А. Губин, Н.Ф. Клюев, А.А. Костылев, Б.Г. Мельников, М.Г. Степанов, Е.А. Ткачев; Под ред. Н.Ф. Клюева. - М.: Министерство обороны СССР, 1987 - 430 с.
6. Радиолокационная станция «Резонанс-Н» (69Я6). Часть 1: учебное пособие, А.В. Щербинко [и др.] М: Изд-во «Сам Полиграфист», 2020 - 284 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ЕЕ РАДИАЛЬНОГО УСКОРЕНИЯ ПРИ НЕОДНОЗНАЧНЫХ ИЗМЕРЕНИЯХ РАДИАЛЬНОЙ СКОРОСТИ | 2021 |
|
RU2796965C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ НЕОДНОЗНАЧНЫХ ИЗМЕРЕНИЯХ ДОПЛЕРОВСКОЙ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2796966C1 |
| Способ определения модуля скорости баллистического объекта с использованием выборки произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2634479C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2646854C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ВЫБОРКИ КВАДРАТОВ ДАЛЬНОСТИ | 2015 |
|
RU2658317C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2540323C1 |
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ РАДИАЛЬНОЙ СКОРОСТИ | 2022 |
|
RU2793774C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ НЕМАНЕВРИРУЮЩЕЙ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ ПО ФИКСИРОВАННОЙ ВЫБОРКЕ КВАДРАТОВ ДАЛЬНОСТИ | 2016 |
|
RU2626015C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА | 2015 |
|
RU2607358C1 |
| Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности | 2016 |
|
RU2621692C1 |
Изобретение относится к радиолокации. Техническим результатом является повышение точности определения вертикальной скорости баллистической цели (БЦ) за счет устранения неоднозначности измерений ее радиальной скорости  В заявленном способе по измерениям дальности ri и угла места εt вычисляют ускорение силы тяжести qcp, геоцентрические углы ϕ1, ϕср и ϕN между РЛС и БЦ в начале, в середине и в конце интервала наблюдения, а также максимальную однозначно измеряемую радиальную скорость
В заявленном способе по измерениям дальности ri и угла места εt вычисляют ускорение силы тяжести qcp, геоцентрические углы ϕ1, ϕср и ϕN между РЛС и БЦ в начале, в середине и в конце интервала наблюдения, а также максимальную однозначно измеряемую радиальную скорость  где
где  - несущая частота, Fп - частота повторения РЛС, с - скорость света. Путем взвешенного суммирования выборки измерений дальности оценивают ее второе приращение
- несущая частота, Fп - частота повторения РЛС, с - скорость света. Путем взвешенного суммирования выборки измерений дальности оценивают ее второе приращение  и однозначную радиальную скорость
и однозначную радиальную скорость  Вычисляют межобзорные разности радиальной скорости
Вычисляют межобзорные разности радиальной скорости  По знаку оценки
По знаку оценки  и по результатам сравнения
и по результатам сравнения  с
с  определяют межобзорные коэффициенты неоднозначности ГП и вычисляют однозначные на интервале наблюдения значения радиальной скорости
определяют межобзорные коэффициенты неоднозначности ГП и вычисляют однозначные на интервале наблюдения значения радиальной скорости  . Путем взвешенного суммирования выборки значений
. Путем взвешенного суммирования выборки значений  оценивают их первое
оценивают их первое  и второе
и второе  приращения. Далее вычисляют вертикальную скорость БЦ в середине интервала наблюдения на невозмущенной баллистической траектории. 2 н. и 4 з.п. ф-лы, 6 ил., 3 табл., 3 пр.
приращения. Далее вычисляют вертикальную скорость БЦ в середине интервала наблюдения на невозмущенной баллистической траектории. 2 н. и 4 з.п. ф-лы, 6 ил., 3 табл., 3 пр.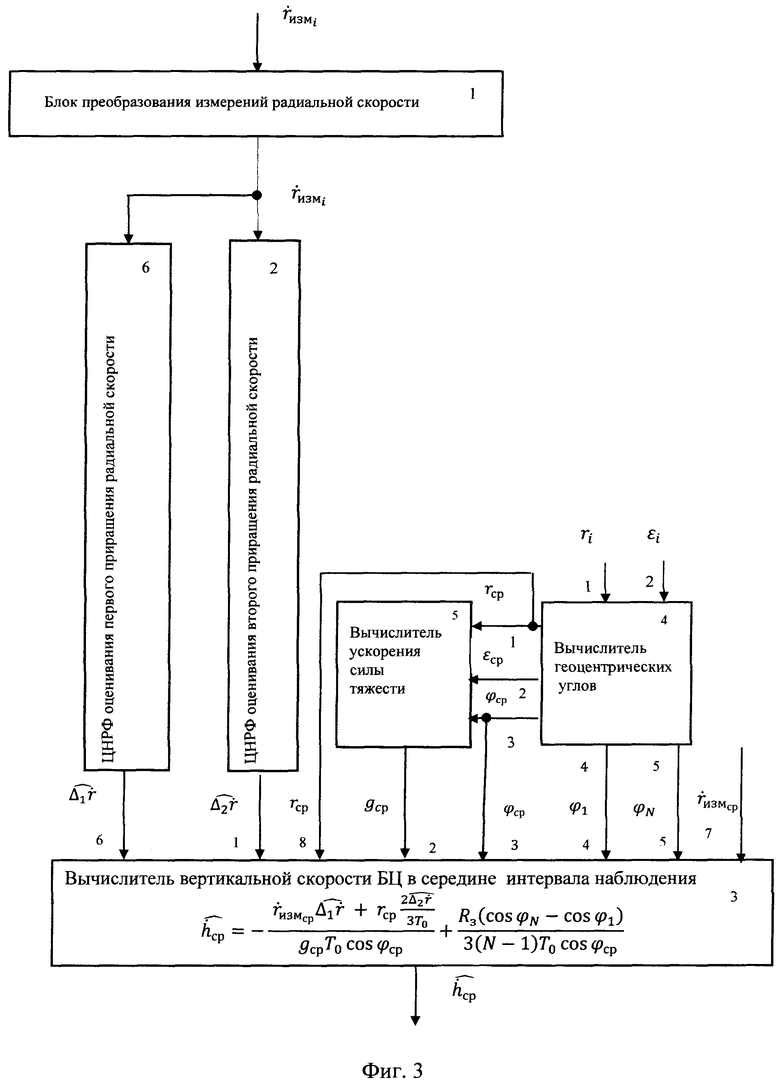
1. Способ определения вертикальной скорости баллистической цели с использованием оценок первого и второго приращений ее радиальной скорости, заключающийся в том, что с помощью РЛС через одинаковые промежутки времени, равные ее периоду обзора Т0, измеряют дальность ri, радиальную скорость  и угол места εi баллистической цели (БЦ), где i - номер измерения координаты в интервале наблюдения, содержащем N измерений и находящемся на невозмущенном пассивном участке баллистической траектории, по результатам однозначных измерений дальности и угла места определяют геоцентрические углы между РЛС и БЦ в начале интервала наблюдения
и угол места εi баллистической цели (БЦ), где i - номер измерения координаты в интервале наблюдения, содержащем N измерений и находящемся на невозмущенном пассивном участке баллистической траектории, по результатам однозначных измерений дальности и угла места определяют геоцентрические углы между РЛС и БЦ в начале интервала наблюдения  между РЛС и БЦ в середине интервала наблюдения
между РЛС и БЦ в середине интервала наблюдения  а также между РЛС и БЦ в конце интервала наблюдения
а также между РЛС и БЦ в конце интервала наблюдения  эти геоцентрические углы используют для определения ускорения силы тяжести в середине интервала наблюдения
эти геоцентрические углы используют для определения ускорения силы тяжести в середине интервала наблюдения  где
где  - ускорение силы тяжести на поверхности Земли, R3 - радиус Земли, а также для определения поправки к вертикальной скорости на кривизну Земли, отличающийся тем, что радиальная скорость измеряется неоднозначно, то есть абсолютные значения истинной радиальной скорости
- ускорение силы тяжести на поверхности Земли, R3 - радиус Земли, а также для определения поправки к вертикальной скорости на кривизну Земли, отличающийся тем, что радиальная скорость измеряется неоднозначно, то есть абсолютные значения истинной радиальной скорости  могут в разы превышать ее измеренные значения
могут в разы превышать ее измеренные значения  для устранения неоднозначности радиальной скорости в середине интервала наблюдения формируют фиксированную выборку из N измеренных значений дальности ri, умножают эту выборку на весовые коэффициенты
для устранения неоднозначности радиальной скорости в середине интервала наблюдения формируют фиксированную выборку из N измеренных значений дальности ri, умножают эту выборку на весовые коэффициенты  оценивания первого приращения, после суммирования фиксированной выборки взвешенных коэффициентами
оценивания первого приращения, после суммирования фиксированной выборки взвешенных коэффициентами  измерений дальности определяют оценку первого приращения дальности
измерений дальности определяют оценку первого приращения дальности  в середине интервала наблюдения, после деления этой оценки на период обзора Т0 получают оценку истинной радиальной скорости
в середине интервала наблюдения, после деления этой оценки на период обзора Т0 получают оценку истинной радиальной скорости  в середине интервала наблюдения, для устранения неоднозначности радиальной скорости на интервале наблюдения относительно его начала или конца фиксированную выборку из N измеренных значений дальности ri умножают на весовые коэффициенты
в середине интервала наблюдения, для устранения неоднозначности радиальной скорости на интервале наблюдения относительно его начала или конца фиксированную выборку из N измеренных значений дальности ri умножают на весовые коэффициенты  оценивания второго приращения, после суммирования фиксированной выборки взвешенных коэффициентами
оценивания второго приращения, после суммирования фиксированной выборки взвешенных коэффициентами  измерений дальности определяют оценку второго приращения дальности
измерений дальности определяют оценку второго приращения дальности  измеряют несущую частоту ƒ0 высокочастотных импульсов передающего устройства РЛС и частоту повторения Fп этих импульсов, вычисляют максимальную однозначно измеряемую радиальную скорость по формуле
измеряют несущую частоту ƒ0 высокочастотных импульсов передающего устройства РЛС и частоту повторения Fп этих импульсов, вычисляют максимальную однозначно измеряемую радиальную скорость по формуле  где с - скорость распространения электромагнитной волны, вычисляют абсолютную разность измерений радиальной скорости в соседних обзорах
где с - скорость распространения электромагнитной волны, вычисляют абсолютную разность измерений радиальной скорости в соседних обзорах  определяют межобзорные коэффициенты неоднозначности mi относительно конца или начала интервала наблюдения по следующему правилу: если оценка второго приращения дальности положительна, то есть
определяют межобзорные коэффициенты неоднозначности mi относительно конца или начала интервала наблюдения по следующему правилу: если оценка второго приращения дальности положительна, то есть  то межобзорный коэффициент неоднозначности в конце интервала наблюдения приравнивают нулю, то есть mN=0, далее в каждом обзоре, начиная с предпоследнего N-1 обзора, сравнивают разности
то межобзорный коэффициент неоднозначности в конце интервала наблюдения приравнивают нулю, то есть mN=0, далее в каждом обзоре, начиная с предпоследнего N-1 обзора, сравнивают разности  с половиной максимальной однозначно измеряемой радиальной скорости
с половиной максимальной однозначно измеряемой радиальной скорости  если
если  то коэффициенты неоднозначности в предыдущем и текущем обзорах считают одинаковыми, то есть mi-1=mi, если
то коэффициенты неоднозначности в предыдущем и текущем обзорах считают одинаковыми, то есть mi-1=mi, если  то к коэффициенту неоднозначности в текущем обзоре прибавляют единицу, то есть mi-1=mi+1, если оценка второго приращения дальности отрицательна, то есть
то к коэффициенту неоднозначности в текущем обзоре прибавляют единицу, то есть mi-1=mi+1, если оценка второго приращения дальности отрицательна, то есть  то межобзорный коэффициент неоднозначности в начале интервала наблюдения приравнивают нулю, то есть m1=0, далее в каждом обзоре, начиная со второго обзора, сравнивают разности
то межобзорный коэффициент неоднозначности в начале интервала наблюдения приравнивают нулю, то есть m1=0, далее в каждом обзоре, начиная со второго обзора, сравнивают разности  с половиной максимальной однозначно измеряемой радиальной скорости, если
с половиной максимальной однозначно измеряемой радиальной скорости, если  то коэффициенты неоднозначности в предыдущем и текущем обзорах считают одинаковыми, то есть mi-1=mi, если
то коэффициенты неоднозначности в предыдущем и текущем обзорах считают одинаковыми, то есть mi-1=mi, если  то к коэффициенту неоднозначности в предыдущем обзоре прибавляют единицу, то есть mi=mi-1+1, с учетом полученных коэффициентов неоднозначности mi вычисляют преобразованные значения радиальной скорости по формуле
то к коэффициенту неоднозначности в предыдущем обзоре прибавляют единицу, то есть mi=mi-1+1, с учетом полученных коэффициентов неоднозначности mi вычисляют преобразованные значения радиальной скорости по формуле  после этого формируют фиксированную выборку из N преобразованных значений радиальной скорости
после этого формируют фиксированную выборку из N преобразованных значений радиальной скорости  далее оценивают первое
далее оценивают первое  и второе
и второе  приращения преобразованной радиальной скорости путем оптимального взвешенного суммирования с весовыми коэффициентами
приращения преобразованной радиальной скорости путем оптимального взвешенного суммирования с весовыми коэффициентами  значений преобразованной радиальной скорости, в итоге по полученным оценкам радиальной скорости
значений преобразованной радиальной скорости, в итоге по полученным оценкам радиальной скорости  в середине интервала наблюдения, по оценкам первого
в середине интервала наблюдения, по оценкам первого  и второго
и второго  приращений преобразованной радиальной скорости, по вычисленным значениям ускорения силы тяжести и геоцентрических углов ϕ1, ϕср и ϕN, а также по измеренным значениям дальности rср до БЦ в середине интервала наблюдения определяют значение вертикальной скорости БЦ в середине интервала наблюдения на невозмущенном пассивном участке баллистической траектории по формуле
приращений преобразованной радиальной скорости, по вычисленным значениям ускорения силы тяжести и геоцентрических углов ϕ1, ϕср и ϕN, а также по измеренным значениям дальности rср до БЦ в середине интервала наблюдения определяют значение вертикальной скорости БЦ в середине интервала наблюдения на невозмущенном пассивном участке баллистической траектории по формуле  где второе слагаемое, то есть
где второе слагаемое, то есть  является поправкой к вертикальной скорости на кривизну Земли.
является поправкой к вертикальной скорости на кривизну Земли.
2. Способ по п. 1, отличающийся тем, что на интервале наблюдения осуществляют одновременную перестройку несущей частоты ƒ0 высокочастотных импульсов передающего устройства РЛС и частоты повторения Fп этих импульсов, при этом значения ƒ0 и Fп увеличивают или уменьшают в одинаковое число раз.
3. Способ по п. 1 или 2, отличающийся тем, что вычисляют коэффициент неоднозначности радиальной скорости Мср в середине интервала наблюдения путем деления оценки истинной радиальной скорости  в середине интервала наблюдения, определяемой по фиксированной выборке измерений дальности, на максимальную однозначно измеряемую радиальную скорость
в середине интервала наблюдения, определяемой по фиксированной выборке измерений дальности, на максимальную однозначно измеряемую радиальную скорость  по формуле
по формуле  где int(*) означает операцию вычисления целой части от составной дроби
где int(*) означает операцию вычисления целой части от составной дроби  далее вычисляют уточненную оценку истинной радиальной скорости в середине интервала наблюдения по формуле
далее вычисляют уточненную оценку истинной радиальной скорости в середине интервала наблюдения по формуле 
4. Устройство определения вертикальной скорости баллистической цели с использованием оценок первого и второго приращений ее радиальной скорости, содержащее последовательно соединенные блок преобразования измерений радиальной скорости (блок 1), на вход которого подают измеренные значения радиальной скорости, ЦНРФ оценивания второго приращения радиальной скорости (блок 2) и вычислитель вертикальной скорости БЦ в середине интервала наблюдения (блок 3), ко второму входу которого подключен выход вычислителя ускорения силы тяжести (блок 5), три входа которого соединены с первым, вторым и третьим выходами вычислителя геоцентрических углов (блок 4), третий, четвертый и пятый выходы которого подключены к одноименным входам блока (3), а на первый и второй входы блока (4) подают результаты измерений дальности и угла места, выход вычислителя вертикальной скорости БЦ в середине интервала наблюдения является выходом заявленного устройства, отличающееся тем, что в состав блока преобразования измерений радиальной скорости (блок 1) входят дополнительно введенные, последовательно соединенные вычислитель разности измерений радиальной скорости в соседних обзорах (блок 1.1), вычислитель межобзорного коэффициента (блок 1.2) и вычислитель преобразованной радиальной скорости (блок 1.3), вторые входы блока (1.2) и блока (1.3) соединены с выходом дополнительно введенного вычислителя максимальной однозначно измеряемой радиальной скорости (блок 9), на входы которого подают измеренные значения несущей частоты высокочастотных импульсов передатчика РЛС и частоты следования этих импульсов, третий вход блока (1.2) подключен к выходу дополнительно введенного ЦНРФ оценивания второго приращения дальности (блок 10), на вход которого подают измеренные значения дальности, к седьмому входу блока (3) подключены дополнительно введенные последовательно соединенные делитель на период обзора (блок 8) и ЦНРФ оценивания первого приращения дальности в середине интервала наблюдения (блок 8), на вход которого подают измеренные значения дальности до БЦ.
5. Устройство по п. 4, отличающееся тем, что входы дополнительно введенного вычислителя максимальной однозначно измеряемой радиальной скорости (блок 9) подключены к соответствующим выходам дополнительно введенного блока перестройки частот (блок 11), на первый и второй входы которого подают измеренные в начале интервала наблюдения значения несущей частоты высокочастотных импульсов передатчика РЛС и частоты повторения этих импульсов.
6. Устройство по п. 4 или 5, отличающееся тем, что выход делителя на период обзора (блок 8) соединен с входом дополнительно введенных, последовательно соединенных вычислителя коэффициента неоднозначности в середине интервала наблюдения (блок 12) и сумматора (блок 13), выход которого подключен к седьмому входу блока 3, вторые входы блоков 12 и 13 подключены к выходу блока 9, а на третий вход блока 13 подают значение радиальной скорости, измеренное в середине интервала наблюдения.
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ВЫБОРКИ КВАДРАТОВ ДАЛЬНОСТИ | 2015 |
|
RU2658317C1 |
| Способ определения модуля скорости баллистического объекта с использованием выборки произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2634479C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ | 2012 |
|
RU2559296C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2540323C1 |
| US 6082666 A, 04.07.2000 | |||
| US 3990657 A, 09.11.1976 | |||
| АВТОМАТ С ПОДСТВОЛЬНЫМ ГРАНАТОМЕТОМ | 1999 |
|
RU2172461C2 |
