Изобретение относится к области радиолокации и может быть использовано преимущественно в обзорных радиолокационных станциях обнаружения (РЛС) для определения истинного значения радиальной скорости летательных аппаратов (ЛА), то есть аэродинамических и баллистических целей (АЦ и БЦ).
Известны цифровые устройства доплеровской обработки импульсных видеосигналов, обеспечивающие определение радиальной скорости воздушной или иной цели и направления ее движения путем измерения величины доплеровской частоты и ее знака [1, с. 155, рис. 12].
Недостаток устройств. Эти устройства не обеспечивают возможность прямого однозначного определения радиальной скорости и ее знака, если измеряемая доплеровская частота Fд превышает половину частоты повторения Fп импульсов РЛС. Поэтому максимальная однозначно измеряемая радиальная скорость  равна произведению четверти длины волны λ РЛС на частоту повторения, то есть
равна произведению четверти длины волны λ РЛС на частоту повторения, то есть  [2, с. 297-298].
[2, с. 297-298].
Известно устройство, обеспечивающее расширение диапазона однозначного определения радиальной скорости в два раза [3]. В этом устройстве в результате вырезания части спектральных линий («прополки» спектра) образуется новый однополосный выходной импульсный видеосигнал, обеспечивающий однозначное определение доплеровской частоты в пределах от 0 до Fп.
Недостаток устройства: не обеспечивается возможность прямого однозначного определения радиальной скорости ЛА, если доплеровская частота превышает величину частоты повторения Fп.
Наиболее близким по технической сущности к заявляемому изобретению, то есть прототипом, является способ однозначного определения радиальной скорости в когерентно-импульсной РЛС, предложенный в патенте 2574079 [4].
В этом способе-прототипе однозначное определение радиальной скорости достигается на основе использования взаимной корреляционной функции (ВКФ) отраженного сигнала и опорного зондирующего сигнала передающего устройства РЛС. При этом по числу максимумов ВКФ устанавливают диапазон, в котором находится истинное значение доплеровской частоты сигнала Fди.
Для проведения корреляционного анализа отраженных сигналов их сначала переводят в цифровую форму, а затем объединяют в единый синтезированный цифровой сигнал, длительность которого равна периоду повторения импульсов РЛС:  . После расчета ВКФ синтезированного сигнала ее огибающую пропускают через низкочастотный фильтр и подсчитывают число ее глобальных максимумов M.
. После расчета ВКФ синтезированного сигнала ее огибающую пропускают через низкочастотный фильтр и подсчитывают число ее глобальных максимумов M.
Это число M называют также коэффициентом неоднозначности, показывающем целое число максимальных однозначно измеряемых доплеровских частот  , входящих в истинное значение Fди доплеровской частоты сигнала.
, входящих в истинное значение Fди доплеровской частоты сигнала.
Одновременно усиленные сигналы с выхода усилителя промежуточной частоты (УПЧ) подают на гребенку узкополосных фильтров (УДФ) и по номеру фильтра, выходной сигнал которого превышает пороговое значение, определяют неоднозначную доплеровскую частоту Fдн отраженного сигнала.
Далее определяют истинное значение доплеровской частоты сигнала путем суммирования неоднозначной доплеровской частоты и произведения коэффициента неоднозначности на максимальную однозначно измеряемую доплеровскую частоту: Fди=Fдн+MFдмакс.
Затем вычисляют истинную радиальную скорость:

где λ - длина волны РЛС.
Таким образом, преимущество способа-прототипа заключается в обеспечении возможности однозначно определять радиальную скорость ЛА в когерентно-импульсной РЛС при доплеровских частотах, превышающих значение частоты повторения зондирующих импульсов РЛС в несколько раз.
К недостаткам способа-прототипа следует отнести необходимость обеспечения достаточно большого отношения сигнал-шум для каждого импульса пачки отраженных когерентных сигналов. По этой причине он используется в РЛС с дальностью действия до нескольких десятков километров. Во-вторых, способ-прототип характеризуется повышенными вычислительными затратами и емкостью запоминающих устройств. Это обусловлено тем, что для проведения корреляционного анализа формируют синтезированный цифровой сигнал длительностью, равной периоду повторения, в котором соединяют между собой оцифрованные импульсы пачки отраженных, последовательно принимаемых когерентных сигналов. При этом необходимо запоминать и обрабатывать большие массивы цифровых сигналов в каждом периоде повторения.
Задачей или техническим результатом изобретения является разработка способа и устройства его реализации, позволяющего однозначно определять радиальную скорость ЛА при доплеровских частотах, превышающих значение частоты повторения в несколько раз при существенно меньших вычислительных затратах и емкости запоминающих устройств.
В отличие от прототипа, разрешение неоднозначности радиальной скорости осуществляют на этапе вторичной (трассовой) обработки радиолокационной информации (РЛИ).
Для этого так же, как в способе-прототипе усиленные сигналы с выхода УПЧ подают на гребенку узкополосных доплеровских фильтров и по номеру фильтра, выходной сигнал которого превышает пороговое значение, определяют неоднозначную доплеровскую частоту  . При этом для измерения
. При этом для измерения  используют всю или часть пачки принятых когерентных сигналов. Поэтому отношение сигнал-шум для одного импульса может быть меньше единицы, что характерно для РЛС дальнего обнаружения.
используют всю или часть пачки принятых когерентных сигналов. Поэтому отношение сигнал-шум для одного импульса может быть меньше единицы, что характерно для РЛС дальнего обнаружения.
Далее, в отличие от способа-прототипа, вычисляют значение неоднозначной радиальной скорости  по формуле:
по формуле:

где с - скорость распространения электромагнитной волны.
Затем на интервале наблюдения формируют фиксированную выборку, содержащую N значений неоднозначной радиальной скорости  , и вычисляют абсолютную разность между значениями радиальной скорости в соседних обзорах или в соседних точках траектории на интервале наблюдения:
, и вычисляют абсолютную разность между значениями радиальной скорости в соседних обзорах или в соседних точках траектории на интервале наблюдения:

Одновременно вычисляют максимальную однозначно измеряемую радиальную скорость:

При этом несущую частоту ƒ0 высокочастотных импульсов передающего устройства РЛС и частоту их повторения Fп настраивают таким образом, чтобы  была вдвое больше, чем истинная максимальная межобзорная разность на интервале наблюдения:
была вдвое больше, чем истинная максимальная межобзорная разность на интервале наблюдения:
Одновременно с помощью цифровых нерекурсивных фильтров (ЦНРФ) формируют фиксированную выборку, содержащую N измеренных значений дальности ri до ЛА, и оценивают второе приращение дальности  путем оптимального, взвешенного весовыми коэффициентами
путем оптимального, взвешенного весовыми коэффициентами  суммирования измеренных значений дальности:
суммирования измеренных значений дальности:

а также первое приращение дальности  путем оптимального, взвешенного весовыми коэффициентами
путем оптимального, взвешенного весовыми коэффициентами  суммирования фиксированной выборки из N однозначно измеренных значений дальности:
суммирования фиксированной выборки из N однозначно измеренных значений дальности:

Далее делят оценку  на период обзора То и получают оценку истинной радиальной скорости в середине интервала наблюдения:
на период обзора То и получают оценку истинной радиальной скорости в середине интервала наблюдения:

Затем вычисляют коэффициент неоднозначности Мср радиальной скорости в середине интервале наблюдения, который показывает целое число значений  , входящее в оценку истинной радиальной скорости
, входящее в оценку истинной радиальной скорости  в середине интервала наблюдения:
в середине интервала наблюдения:

где int(…) - операция вычисления целого числа.
После этого вычисляют межобзорные коэффициенты неоднозначности относительно измеренных значений радиальной скорости в начале  или в конце
или в конце  интервала наблюдения по следующей методике.
интервала наблюдения по следующей методике.
Если оценка  положительна, то есть
положительна, то есть  >0, то межобзорный коэффициент неоднозначности в конце интервала наблюдения приравнивают к нулю, то есть mN=0.
>0, то межобзорный коэффициент неоднозначности в конце интервала наблюдения приравнивают к нулю, то есть mN=0.
Далее в каждом обзоре, начиная с предпоследнего (N-1) обзора, сравнивают абсолютные значения межобзорных разностей  с максимальной однозначно измеряемой радиальной скоростью
с максимальной однозначно измеряемой радиальной скоростью  . Если абсолютное значение межобзорной разности меньше половины
. Если абсолютное значение межобзорной разности меньше половины  , то межобзорные коэффициенты неоднозначности в текущем i-м и в предыдущем (i-1)-м обзорах считают одинаковыми, то есть mi=mi-1. Если абсолютное значение межобзорной разности больше половины
, то межобзорные коэффициенты неоднозначности в текущем i-м и в предыдущем (i-1)-м обзорах считают одинаковыми, то есть mi=mi-1. Если абсолютное значение межобзорной разности больше половины  , то к межобзорному коэффициенту неоднозначности предыдущего обзора прибавляют единицу: mi=mi-1+1.
, то к межобзорному коэффициенту неоднозначности предыдущего обзора прибавляют единицу: mi=mi-1+1.
Если оценка  отрицательна, то есть
отрицательна, то есть  <0, то межобзорный коэффициент неоднозначности в начале интервала наблюдения приравнивают к нулю, то есть m1=0.
<0, то межобзорный коэффициент неоднозначности в начале интервала наблюдения приравнивают к нулю, то есть m1=0.
Далее в каждом обзоре, начиная со второго обзора, сравнивают  с
с  . Если абсолютное значение межобзорной разности меньше половины
. Если абсолютное значение межобзорной разности меньше половины  , то mi=mi-1. Если абсолютное значение межобзорной разности больше половины
, то mi=mi-1. Если абсолютное значение межобзорной разности больше половины  , то mi=mi-1+1.
, то mi=mi-1+1.
Таким образом, межобзорные коэффициенты неоднозначности mi в соседних обзорах в общем виде вычисляют по формуле:
В итоге с использованием неоднозначных измерений радиальной скорости  , вычисленных значений
, вычисленных значений  , Мср, mi и mср вычисляют во всех обзорах, то есть во всех точках интервала наблюдения, значения истинной однозначной радиальной скорости
, Мср, mi и mср вычисляют во всех обзорах, то есть во всех точках интервала наблюдения, значения истинной однозначной радиальной скорости  по формуле:
по формуле:

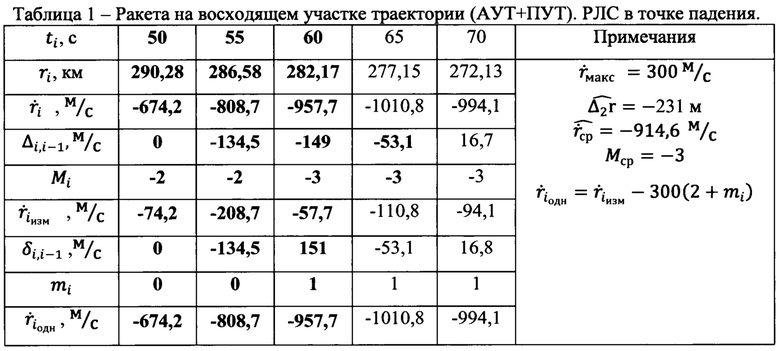
Для доказательства возможности устранения неоднозначности радиальной скорости предлагаемым способом вычислим значения истинной однозначной радиальной скорости в интервале наблюдения, находящемся в конце активного участка траектории (АУТ) и в начале пассивного участка траектории (ПУТ).
Длительность интервала наблюдения 20 с (N=5, Т0=5с). Дальность полета баллистической ракеты (БР) 300 км. РЛС в точке падения БР. АУТ заканчивается на 60-й секунде полета. БР сопровождается в РЛС «Резонанс-Н»: несущая частота ƒ0=75 МГц, частота повторения импульсов Fп=200 Гц. СКО измерения радиальной скорости  , дальности σr=300 м [6, С. 18-22].
, дальности σr=300 м [6, С. 18-22].
Исходные данные и порядок вычислений приведены в таблице 1. Активный участок, как наиболее маневренный, выделен полужирным шрифтом. Радиальные ускорения на АУТ находятся в диапазоне от -24 до -30  . Поэтому на АУТ выполняется условие (5), то есть
. Поэтому на АУТ выполняется условие (5), то есть  не превышает удвоенного произведения максимального радиального ускорения на период обзора.
не превышает удвоенного произведения максимального радиального ускорения на период обзора.
На ПУТ, то есть на участке свободного полета, радиальные ускорения становятся положительными из-за действия силы притяжения Земли и уменьшаются до +3…3,3  , то есть на порядок.
, то есть на порядок.
Дальность и радиальная скорость ракеты измеряют на интервале наблюдения с одинаковой точностью, без пропусков. Поэтому весовые коэффициенты вычислялись по формулам:  и
и  [5, С. 151, 155].
[5, С. 151, 155].
При объеме выборки N=5 формулы оценок приращений дальности (5) и (6) приводятся к виду:


Как видно из табл. 1,  <0, поэтому межобзорные коэффициенты в первых обзорах равны нулю (m1=m2=0). На 60-й секунде
<0, поэтому межобзорные коэффициенты в первых обзорах равны нулю (m1=m2=0). На 60-й секунде  , поэтому в остальных обзорах m3=m4=m5=1.
, поэтому в остальных обзорах m3=m4=m5=1.
В итоге на восходящем участке траектории БР устраняется неоднозначность радиальной скорости при превышении истинной радиальной скорости в три раза значения  .
.
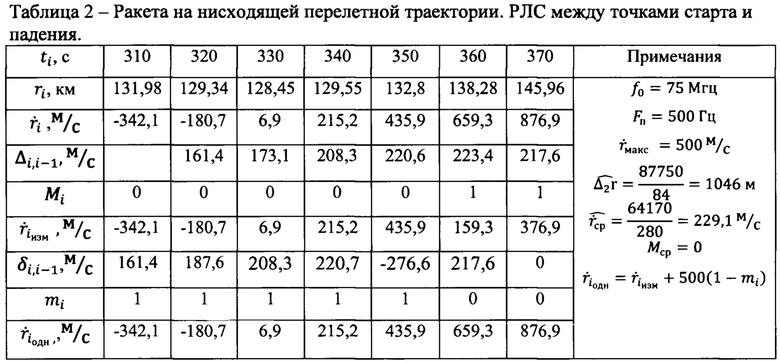
В табл. 2 доказывается возможность устранения неоднозначности радиальной скорости на нисходящем участке траектории БР с дальностью полета 600 км. РЛС находится в плоскости траектории между точками падения и старта БР, то есть в 400 км от точки старта и в 200 км от точки падения.
Радиальные ускорения ЛА находятся в диапазоне от 17 до 22  . Поэтому величина максимальной однозначно измеряемой радиальной скорости выбрана равной 500
. Поэтому величина максимальной однозначно измеряемой радиальной скорости выбрана равной 500  , что достигается при ƒ0=75 МГц и Fп=500 Гц. Данная перелетная траектория является достаточно сложной для устранения неоднозначности, потому что ракета пересекает линию траверза, а период обзора равен 10 секунд.
, что достигается при ƒ0=75 МГц и Fп=500 Гц. Данная перелетная траектория является достаточно сложной для устранения неоднозначности, потому что ракета пересекает линию траверза, а период обзора равен 10 секунд.
При этом, в первых двух обзорах радиальная скорость отрицательна, в остальных обзорах положительна. Это объясняется тем, что между 320-й и 330-й секундами ракета пересекает линию траверза, то есть направление ее минимального удаления от РЛС.
Как видно из табл. 2,  >0, поэтому межобзорные коэффициенты в последних обзорах равны нулю (m7=m6=0). На 350-й секунде
>0, поэтому межобзорные коэффициенты в последних обзорах равны нулю (m7=m6=0). На 350-й секунде  , поэтому m1=m2=m3=m4=m5=1.
, поэтому m1=m2=m3=m4=m5=1.
Таким образом, доказана возможность устранения неоднозначности измерений радиальной скорости как на восходящем, так и на нисходящем участках баллистической траектории. На траекториях полета аэродинамических летательных аппаратов неоднозначность радиальной скорости устраняется существенно проще из-за их меньших маневренных характеристик. При этом предъявляются невысокие требования к точности оценивания первого и второго приращений дальности, так как они используются только для определения межобзорных коэффициентов.
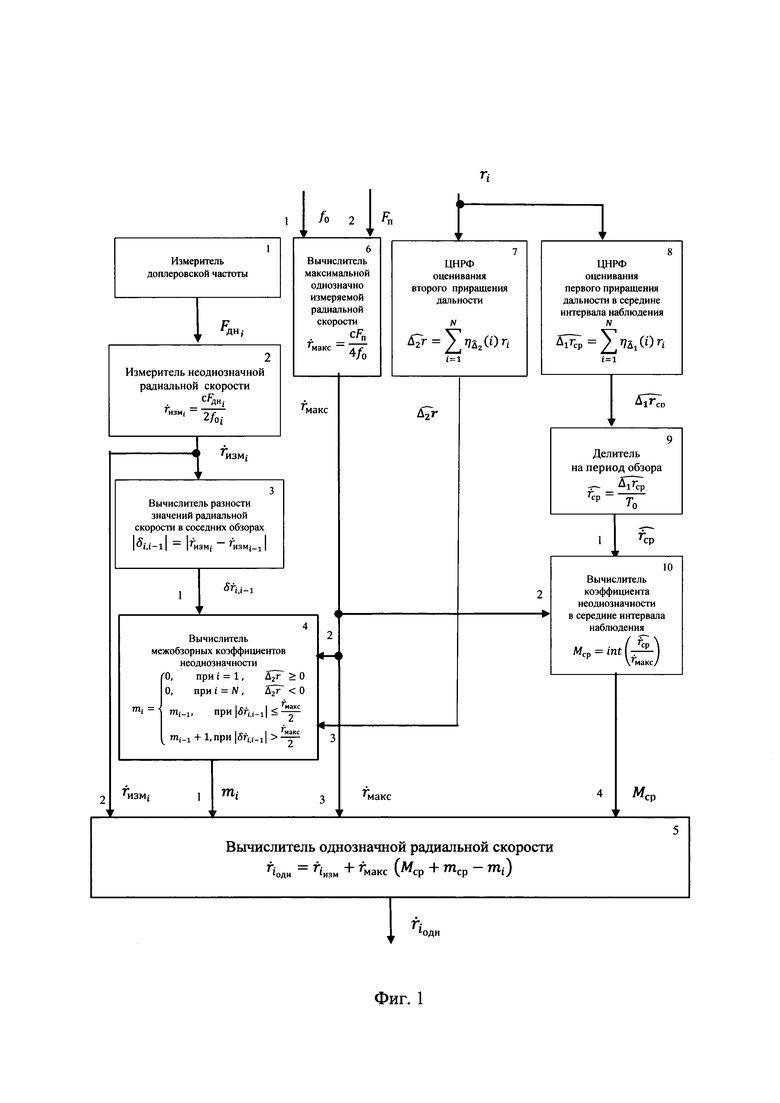
Структурная схема устройства осуществления предлагаемого способа приведена в фиг. 1.
Заявленное устройство так же, как устройство-прототип, содержит измеритель доплеровской частоты (блок 1).
В отличие от устройства-прототипа, согласно изобретению, в состав заявленного устройства дополнительно введены последовательно соединенные с блоком 1 измеритель радиальной скорости (блок 2) и вычислители разности измерений радиальной скорости в соседних обзорах (блок 3), межобзорных коэффициентов неоднозначности (блок 4) и однозначной радиальной скорости (блок 5). Второй вход блока 5 подключен к выходу блока 2. Третий вход блока 5 подключен к выходу вычислителя максимальной однозначно измеряемой радиальной скорости (блок 6), который соединен также со вторыми входами вычислителей межобзорных коэффициентов неоднозначности (блок 4) и коэффициента неоднозначности в середине интервала наблюдения (блок 10). Выход блока 10 подключен к четвертому входу блока 5, а первый вход подключен к выходу делителя на период обзора (блок 9), последовательно соединенного с ЦНРФ оценивания первого приращения дальности в середине интервала наблюдения (блок 8). Третий вход блока 4 подключен к выходу ЦНРФ оценивания второго приращения дальности (блок 7), на вход которого, а также на вход блока 8, подают измеренные значения дальности до ЛА в виде цифровых сигналов. Выход блока 5 является выходом заявленного устройства.
Таким образом, достоинство первого варианта изобретения: устранена неоднозначность измерения радиальной скорости при дальностях ЛА до нескольких сотен километров.
Недостаток первого варианта: низкая защищенность РЛС от воздействия преднамеренных и непреднамеренных активных помех из-за невозможности перестройки несущей частоты ƒ0 передающего устройства.
Второй вариант заявленного изобретения является дальнейшим развитием первого варианта.
Во втором варианте заявленного способа, в отличие от первого варианта, во всех или в части обзоров на интервале наблюдения осуществляют одновременную перестройку несущей частоты высокочастотных импульсов передающего устройства РЛС и частоты их повторения таким образом, чтобы максимальная измеряемая радиальная скорость  оставалась постоянной. Для этого несущую частоту
оставалась постоянной. Для этого несущую частоту  и частоту повторения
и частоту повторения  , установленные в начале интервала наблюдения, одновременно увеличивают или уменьшают в одинаковое число раз в обзорах, где осуществляется перестройка частот.
, установленные в начале интервала наблюдения, одновременно увеличивают или уменьшают в одинаковое число раз в обзорах, где осуществляется перестройка частот.
Пример перестройки несущей частоты и частоты повторения в РЛС типа «Резонанс-Н» приведен в табл. 3.
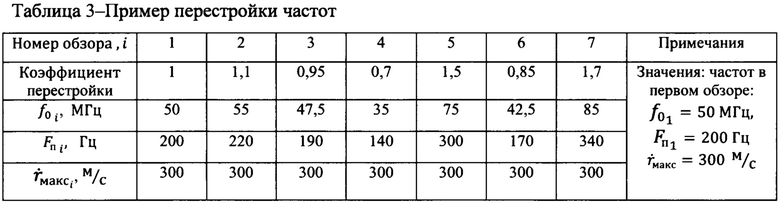
Частоты  и
и  одновременно умножают на коэффициенты перестройки, приведенные во второй строке табл. 3. Если эти коэффициенты больше единицы, то частоты увеличиваются, если меньше единицы, то уменьшаются.
одновременно умножают на коэффициенты перестройки, приведенные во второй строке табл. 3. Если эти коэффициенты больше единицы, то частоты увеличиваются, если меньше единицы, то уменьшаются.
Как видно из таблицы, при перестройке несущей частоты в диапазоне от 35 до 85 МГц, а частоты повторения - в диапазоне от 140 до 340 Гц максимальная измеряемая радиальная скорость остается постоянной ( ), за счет чего устраняется неоднозначность радиальной скорости.
), за счет чего устраняется неоднозначность радиальной скорости.
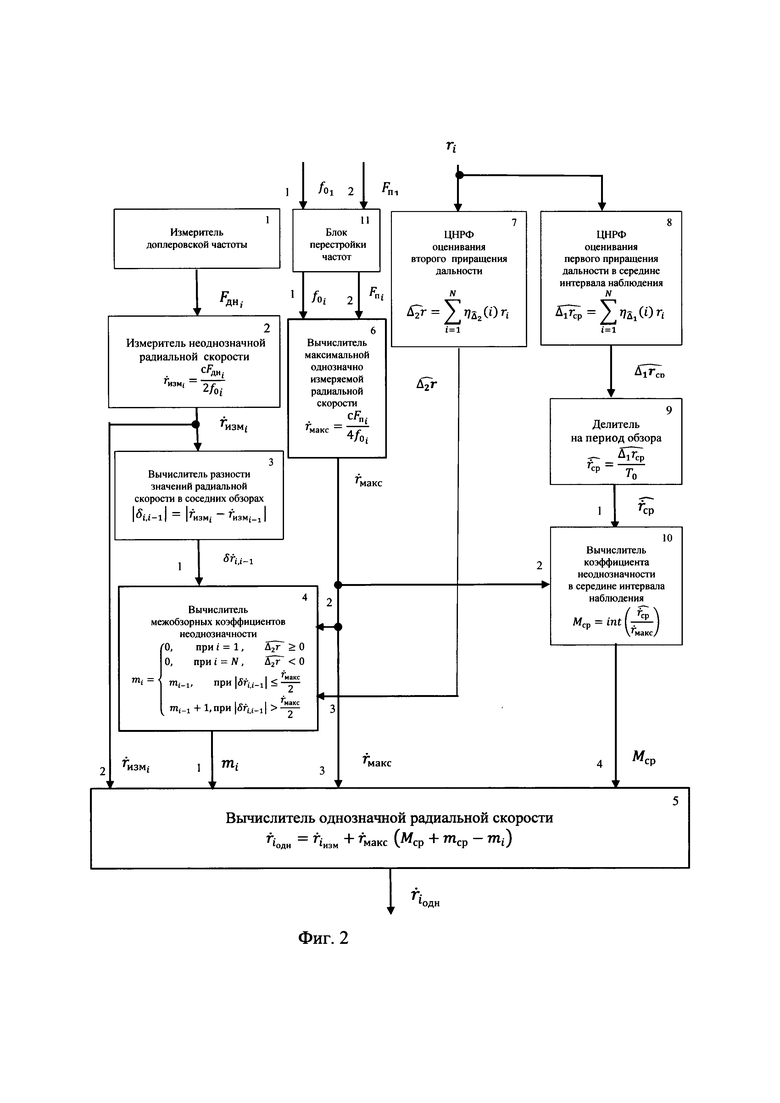
Во втором варианте заявленного устройства, структурная схема которого приведена в фиг. 2, в отличие от первого варианта, первый и второй входы вычислителя максимальной однозначно измеряемой радиальной скорости (блок 6) подключены к соответствующим выходам дополнительно введенного блока перестройки частот (блок 11), на входы которого подают значения несущей частоты и частоты повторения импульсов передатчика РЛС в начале интервала наблюдения.
Таким образом, дополнительным преимуществом второго варианта изобретения является повышение помехозащищенности РЛС за счет перестройки ее несущей частоты.
Полученные однозначные значения радиальной скорости могут быть использованы в устройствах определения параметров движения АЦ и БЦ, для распознавания классов ЛА и обнаружения их маневра, а также для решения других задач.
В заявленном устройстве на много порядков снижены вычислительные затраты по сравнению с прототипом. Наиболее сложными являются цифровые нерекурсивные фильтры (блоки 7 и 8). Они построены по одинаковой схеме, включающей последовательно соединенные запоминающее устройство, блок реализации весовой функции и сумматор. Разные типы ЦНРФ отличаются только весовыми коэффициентами, которые могут быть вычислены заранее и храниться в памяти бортовой ЭВМ. Кроме того, производится запоминание N значений дальности и радиальной скорости, а также N операций умножения сигналов на весовые коэффициенты и N суммирований полученных произведений. Эти операции несоизмеримы по сложности с расчетами взаимной корреляционной функции синтезированного сигнала, проводимыми в прототипе.
Таким образом, доказана реализуемость заявленного технического результата изобретения, а именно: разработаны способ и устройство для его осуществления, позволяющие однозначно определять радиальную скорость ЛА при доплеровских частотах, превышающих значение частоты повторения в несколько раз, с существенно меньшими вычислительными затратами и емкостью запоминающих устройств. Кроме того, повышается помехозащищенность РЛС за счет перестройки несущей частоты и частоты повторения высокочастотных импульсов ее передающего устройства.
Список использованных источников
1. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: «Радио и связь», 1981,416 с.
2. Основы радионавигационных измерений: учебное пособие, Н.Ф. Клюев [и др.] - М: Министерство обороны СССР, 1987, 430 с.
3. Патент №215970. Цифровое устройство обработки квадратурных импульсных видеосигналов. Авторы: Офенгейм И.Г., Давыдычев А.В.
4. Патент №2574079. Способ однозначного измерения радиальной скорости цели в когерентно-импульсной радиолокационной станции. Авторы: Митрофанов Д.Г., Климов С.А. [и др.].
5. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. М.: «Радио и связь», 1986, 352 с.
6. Радиолокационная станция «Резонанс-Н» (69Я6). Часть 1: учебное пособие, А.В. Щербинко [и др.] М.: Изд-во «Сам Полиграфист», 2020 - 284 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ЕЕ РАДИАЛЬНОГО УСКОРЕНИЯ ПРИ НЕОДНОЗНАЧНЫХ ИЗМЕРЕНИЯХ РАДИАЛЬНОЙ СКОРОСТИ | 2021 |
|
RU2796965C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ ЕЕ РАДИАЛЬНОЙ СКОРОСТИ | 2021 |
|
RU2797227C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА ПО ВЫБОРКАМ КВАДРАТОВ ДАЛЬНОСТИ | 2021 |
|
RU2781159C1 |
| Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности | 2016 |
|
RU2621692C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ | 2005 |
|
RU2296346C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ НЕМАНЕВРИРУЮЩЕЙ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ ПО ФИКСИРОВАННОЙ ВЫБОРКЕ КВАДРАТОВ ДАЛЬНОСТИ | 2016 |
|
RU2626015C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ОБЪЕКТА НА ЛИНЕЙНОЙ ТРАЕКТОРИИ С ИСПОЛЬЗОВАНИЕМ ИЗМЕРЕНИЙ ЕГО РАДИАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2714884C1 |
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ РАДИАЛЬНОЙ СКОРОСТИ | 2022 |
|
RU2793774C1 |
| Способ определения модуля скорости баллистического объекта с использованием выборки произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2634479C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1985 |
|
RU2145092C1 |
Изобретение относится к радиолокации. Технический результат изобретения - однозначное измерение радиальной скорости летательного аппарата (ЛА) в когерентно-импульсной радиолокационной станции (РЛС) при доплеровских частотах, превышающих значение частоты повторения в несколько раз. Указанный результат достигается тем, что оценивают второе приращение дальности и однозначную радиальную скорость путем взвешенного суммирования фиксированной выборки измерений дальности. Вычисляют межобзорные разности радиальной скорости, определенные по неоднозначным измерениям доплеровской частоты, и максимальную однозначно измеряемую радиальную скорость, а также межобзорные коэффициенты неоднозначности и коэффициент неоднозначности в середине интервала наблюдения. В итоге определяют значения истинной радиальной скорости на интервале наблюдения. 2 н. и 2 з.п. ф-лы, 2 ил., 3 табл.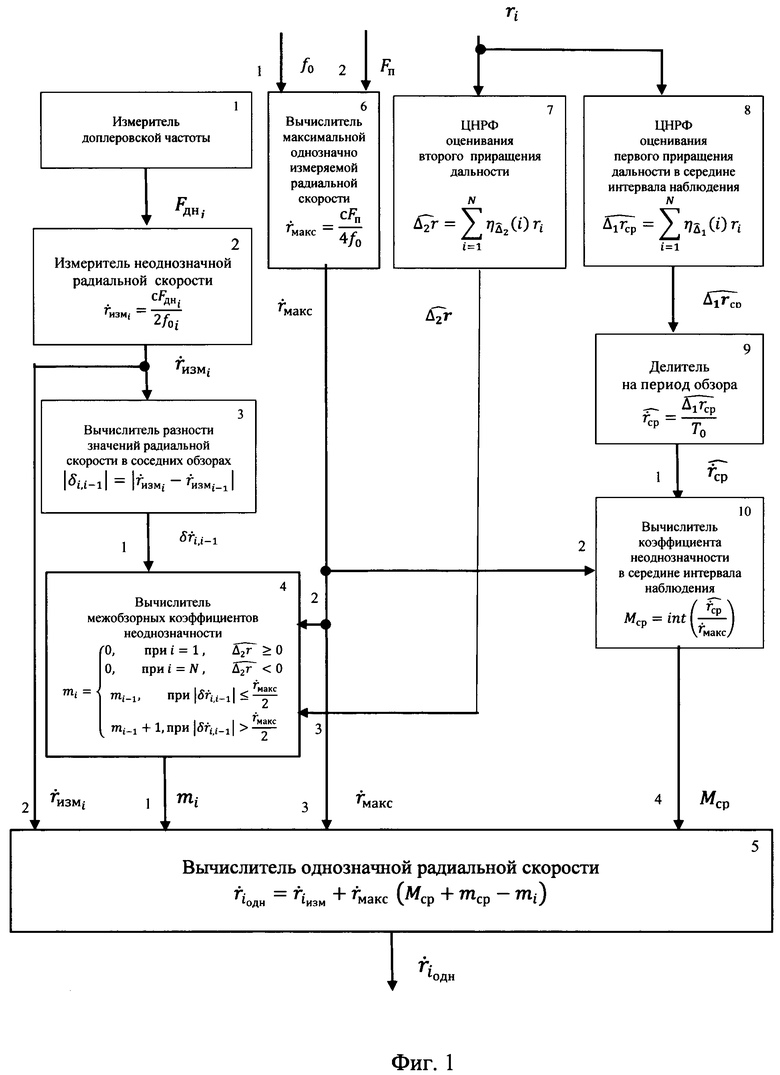
1. Способ определения радиальной скорости летательного аппарата при неоднозначных измерениях доплеровской частоты, заключающийся в том, что в РЛС через одинаковые промежутки времени, равные периоду обзора То, измеряют неоднозначную доплеровскую частоту и преобразуют результаты измерений в цифровые сигналы, отличающийся тем, что в каждом обзоре на интервале наблюдения определяют неоднозначную радиальную скорость  летательного аппарата (ЛА) по результатам измерений неоднозначной доплеровской частоты
летательного аппарата (ЛА) по результатам измерений неоднозначной доплеровской частоты  и несущей частоты
и несущей частоты  передающего устройства радиолокационной станции (РЛС) по формуле
передающего устройства радиолокационной станции (РЛС) по формуле  где с - скорость распространения электромагнитной волны, вычисляют абсолютную разность между значениями радиальной скорости в соседних обзорах
где с - скорость распространения электромагнитной волны, вычисляют абсолютную разность между значениями радиальной скорости в соседних обзорах  , одновременно вычисляют максимальную однозначно измеряемую радиальную скорость
, одновременно вычисляют максимальную однозначно измеряемую радиальную скорость  , где Fп - частота повторения импульсов передающего устройства, далее формируют фиксированную выборку измеренных значений дальности до ЛА и оценивают первое
, где Fп - частота повторения импульсов передающего устройства, далее формируют фиксированную выборку измеренных значений дальности до ЛА и оценивают первое  и второе
и второе  приращения дальности путем оптимального взвешенного суммирования фиксированной выборки измеренных значений дальности ri, затем вычисляют межобзорные коэффициенты неоднозначности mi относительно измеренных значений радиальной скорости в начале
приращения дальности путем оптимального взвешенного суммирования фиксированной выборки измеренных значений дальности ri, затем вычисляют межобзорные коэффициенты неоднозначности mi относительно измеренных значений радиальной скорости в начале  или в конце
или в конце  интервала наблюдения по следующей методике, если оценка
интервала наблюдения по следующей методике, если оценка  , то межобзорный коэффициент неоднозначности в конце интервала наблюдения приравнивают к нулю, то есть mN=0, далее в каждом обзоре, начиная с предпоследнего (N-1) обзора, сравнивают абсолютные значения межобзорных разностей
, то межобзорный коэффициент неоднозначности в конце интервала наблюдения приравнивают к нулю, то есть mN=0, далее в каждом обзоре, начиная с предпоследнего (N-1) обзора, сравнивают абсолютные значения межобзорных разностей  с максимальной однозначно измеряемой радиальной скоростью
с максимальной однозначно измеряемой радиальной скоростью  , если
, если  , то mi=mi-1, при
, то mi=mi-1, при  к межобзорному коэффициенту неоднозначности предыдущего обзора прибавляют единицу mi=mi-1+1, если оценка
к межобзорному коэффициенту неоднозначности предыдущего обзора прибавляют единицу mi=mi-1+1, если оценка  , то mN=0, далее в каждом обзоре, начиная со второго обзора, сравнивают значения
, то mN=0, далее в каждом обзоре, начиная со второго обзора, сравнивают значения  с
с  , если
, если  , то mi=mi-1, а при
, то mi=mi-1, а при  считают, что mi=mi-1+1, одновременно вычисляют оценку истинной радиальной скорости в середине интервала наблюдения путем деления оценки первого приращения дальности
считают, что mi=mi-1+1, одновременно вычисляют оценку истинной радиальной скорости в середине интервала наблюдения путем деления оценки первого приращения дальности  на период обзора
на период обзора  , в итоге с использованием неоднозначных измерений радиальной скорости
, в итоге с использованием неоднозначных измерений радиальной скорости  , вычисленных значений
, вычисленных значений  , Мср, mi и mср определяют во всех обзорах, то есть во всех точках интервала наблюдения, значения истинной однозначной радиальной скорости
, Мср, mi и mср определяют во всех обзорах, то есть во всех точках интервала наблюдения, значения истинной однозначной радиальной скорости  по формуле
по формуле  (Мср+mср-mi).
(Мср+mср-mi).
2. Способ по п. 1, отличающийся тем, что с целью повышения помехозащищенности РЛС во всех или в части обзоров на интервале наблюдения осуществляют одновременную перестройку несущей частоты высокочастотных импульсов передающего устройства РЛС и частоты их повторения таким образом, чтобы максимальная однозначно измеряемая радиальная скорость  оставалась постоянной, для этого несущую частоту
оставалась постоянной, для этого несущую частоту  и частоту повторения
и частоту повторения  , измеренные в начале интервала наблюдения, одновременно увеличивают или уменьшают в одинаковое число раз в обзорах, где осуществляется перестройка частот.
, измеренные в начале интервала наблюдения, одновременно увеличивают или уменьшают в одинаковое число раз в обзорах, где осуществляется перестройка частот.
3. Устройство определения радиальной скорости летательного аппарата при неоднозначных измерениях доплеровской частоты содержит измеритель доплеровской частоты (блок 1), отличающееся тем, что в состав заявленного устройства дополнительно введены последовательно соединенные с блоком 1 измеритель радиальной скорости (блок 2) и вычислители разности измерений радиальной скорости в соседних обзорах (блок 3), межобзорных коэффициентов неоднозначности (блок 4) и однозначной радиальной скорости (блок 5), второй вход которого подключен к выходу блока 2, третий вход блока 5 подключен к выходу вычислителя максимальной однозначно измеряемой радиальной скорости (блок 6), который соединен также со вторыми входами вычислителей межобзорных коэффициентов неоднозначности (блок 4) и коэффициента неоднозначности в середине интервала наблюдения (блок 10), выход которого подключен к четвертому входу блока 5, а первый вход подключен к выходу делителя на период обзора (блок 9), последовательно соединенного с ЦНРФ оценивания первого приращения дальности в середине интервала наблюдения (блок 8), третий вход блока 4 подключен к выходу ЦНРФ оценивания второго приращения дальности (блок 7), на вход которого, а также на вход блока 8 подают измеренные значения дальности до ЛА в виде цифровых сигналов, выход блока 5 является выходом заявленного устройства.
4. Устройство по п. 3, отличающееся тем, что первый и второй входы вычислителя максимальной однозначно измеряемой радиальной скорости (блок 6) подключены к соответствующим выходам дополнительно введенного блока перестройки частот (блок 11), на входы которого подают значения несущей частоты и частоты повторения импульсов передающего устройства РЛС, установленные в начале интервала наблюдения.
| СПОСОБ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2574079C1 |
| Способ оценки радиальной скорости объекта | 2018 |
|
RU2696084C1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДОПЛЕРОВСКОЙ ОБРАБОТКИ КВАДРАТУРНЫХ ИМПУЛЬСНЫХ ВИДЕОСИГНАЛОВ | 1997 |
|
RU2155970C2 |
| CN 107843892 A, 27.03.2018 | |||
| СПОСОБ ТЕРМИЧЕСКОЙ ОБРАБОТКИ УПРУГИХ ЭЛЕМЕНТОВ ИЗ СТАЛЕЙ И СПЛАВОВ | 1993 |
|
RU2093589C1 |
| Пульсоколлектор доильного аппарата | 1985 |
|
SU1323051A1 |

