Изобретение относится к области радиолокации и может быть использовано в наземных радиолокационных станциях (РЛС) для определения вертикальной скорости (вертикальной составляющей вектора скорости) баллистического объекта (БО) в середине интервала наблюдения на невозмущенном пассивном участке (ПУТ) баллистической траектории.
Известны способы и устройства определения вертикальной скорости с помощью цифрового нерекурсивного фильтра (ЦНРФ) путем оптимального взвешенного суммирования фиксированной выборки измеренных значений высоты БО на траектории [1, С. 301-304].
Известны способы и устройства определения вертикальной скорости с помощью α, β фильтра или ∝, β, γ фильтра путем последовательного оптимального сглаживания выборки измеренных значений высоты нарастающего объема [1, С. 321-322, 3, С. 392].
Основным недостатком известных устройств является низкая точность определения вертикальной скорости в РЛС с грубыми измерениями угла места, в частности в РЛС метрового диапазона волн (РЛС МДВ).
Наиболее близким аналогом (прототипом) заявленного изобретения являются способ и устройство радиолокационного определения вертикальной скорости по фиксированной выборке значений высоты с помощью ЦНРФ.
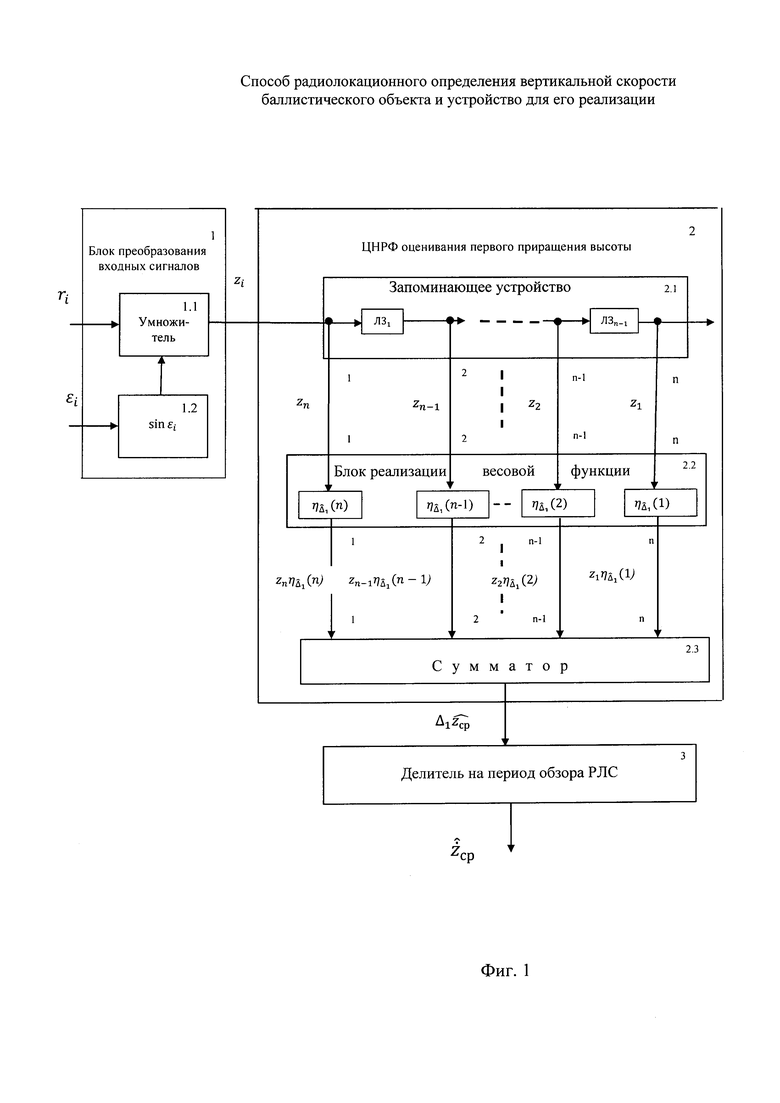
Сущность прототипа поясняется схемой, приведенной на фиг. 1. Устройство-прототип содержит последовательно соединенные блок преобразования входных сигналов (блок 1), обеспечивающий определение высоты zi по данным измерений дальности ri и угла места εi, ЦНРФ (блок 2), обеспечивающий определение оценки, то есть сглаженного значения, первого приращения высоты  за период обзора РЛС, и делитель на период обзора РЛС Т0 (блок 3), выход которого является выходом устройства-прототипа.
за период обзора РЛС, и делитель на период обзора РЛС Т0 (блок 3), выход которого является выходом устройства-прототипа.
Оценку первого приращения высоты в ЦНРФ определяют следующим образом. Значение высоты в текущем обзоре  в блоке 2.2 реализации весовой функции умножают на весовой коэффициент и подают на вход сумматора 2.3. Значения высоты в предыдущих обзорах zn-1, zn-2, … z2, z1, задерживают в запоминающем устройстве 2.1 на соответствующее число обзоров, умножают на весовые коэффициенты в блоке 2.2 и подают на входы сумматора 2.3 одновременно с взвешенным текущим измерением высоты
в блоке 2.2 реализации весовой функции умножают на весовой коэффициент и подают на вход сумматора 2.3. Значения высоты в предыдущих обзорах zn-1, zn-2, … z2, z1, задерживают в запоминающем устройстве 2.1 на соответствующее число обзоров, умножают на весовые коэффициенты в блоке 2.2 и подают на входы сумматора 2.3 одновременно с взвешенным текущим измерением высоты  В итоге на входе сумматора формируется фиксированная выборка взвешенных значений высоты, а на его выходе получают сглаженное значение, то есть оценку, первого приращения.
В итоге на входе сумматора формируется фиксированная выборка взвешенных значений высоты, а на его выходе получают сглаженное значение, то есть оценку, первого приращения.
При оценивании приращения высоты в цифровой вычислительной машине (ЦВМ) запоминание координат производится в оперативном запоминающем устройстве, заранее вычисленные весовые коэффициенты в виде констант хранятся в долговременном запоминающем устройстве, а операции суммирования и умножения производятся в арифметическом устройстве ЦВМ [1, рис. 4.7, С. 303-304].
Ошибки оценивания вертикальной скорости зависят практически только от погрешностей измерения угла места:  где
где  - среднеквадратическая ошибка (СКО) измерения угла места [1, формула 4.63, С. 308]. В РЛС МДВ СКО измерения угла места могут достигать значений до нескольких градусов. Поэтому ошибки оценивания вертикальной скорости при больших дальностях до БО могут достигать значений до нескольких сотен метров в секунду.
- среднеквадратическая ошибка (СКО) измерения угла места [1, формула 4.63, С. 308]. В РЛС МДВ СКО измерения угла места могут достигать значений до нескольких градусов. Поэтому ошибки оценивания вертикальной скорости при больших дальностях до БО могут достигать значений до нескольких сотен метров в секунду.
Техническим результатом первого варианта заявленного изобретения является повышение точности определения вертикальной скорости за счет использования фиксированных выборок произведений дальности на радиальную скорость и уменьшения, вследствие этого, влияния ошибок измерения угла места.
Указанный технический результат достигается тем, что в первом варианте способа радиолокационного определения вертикальной скорости баллистического объекта, включающем преобразование входных сигналов, определение высоты баллистического объекта по данным измерений его дальности и угла места и оценивание приращения преобразованных сигналов за период обзора РЛС Т0, согласно изобретению в качестве входных сигналов используют данные измерений радиальной скорости, при преобразовании входных сигналов перемножают данные измерений дальности и радиальной скорости и получают произведения дальности на радиальную скорость, формируют фиксированную выборку произведений дальности на радиальную скорость, по этой фиксированной выборке определяют оценку второго приращения произведения дальности на радиальную скорость  за период обзора РЛС с помощью цифрового нерекурсивного фильтра. Далее по результатам измерений угла места и дальности определяют высоту баллистического объекта в середине интервала наблюдения
за период обзора РЛС с помощью цифрового нерекурсивного фильтра. Далее по результатам измерений угла места и дальности определяют высоту баллистического объекта в середине интервала наблюдения  , в начале интервала наблюдения
, в начале интервала наблюдения  и в конце интервала наблюдения
и в конце интервала наблюдения  , где
, где  - дальности в середине, в начале и в конце интервала наблюдения,
- дальности в середине, в начале и в конце интервала наблюдения,  - углы места в середине, в начале и в конце интервала наблюдения. Затем определяют геоцентрический угол между радиолокационной станцией и баллистическим объектом в середине интервала наблюдения
- углы места в середине, в начале и в конце интервала наблюдения. Затем определяют геоцентрический угол между радиолокационной станцией и баллистическим объектом в середине интервала наблюдения  , где R3 - радиус Земли, и ускорение силы тяжести в середине интервала наблюдения
, где R3 - радиус Земли, и ускорение силы тяжести в середине интервала наблюдения  , где
, где  - ускорение силы тяжести на поверхности Земли, а также определяют геоцентрические углы между радиолокационной станцией и баллистическим объектом в начале интервала наблюдения
- ускорение силы тяжести на поверхности Земли, а также определяют геоцентрические углы между радиолокационной станцией и баллистическим объектом в начале интервала наблюдения  и в конце интервала наблюдения
и в конце интервала наблюдения  . В итоге определяют оценку, то есть сглаженное значение, вертикальной скорости баллистического объекта в середине интервала наблюдения на невозмущенном пассивном участке траектории по формуле
. В итоге определяют оценку, то есть сглаженное значение, вертикальной скорости баллистического объекта в середине интервала наблюдения на невозмущенном пассивном участке траектории по формуле 
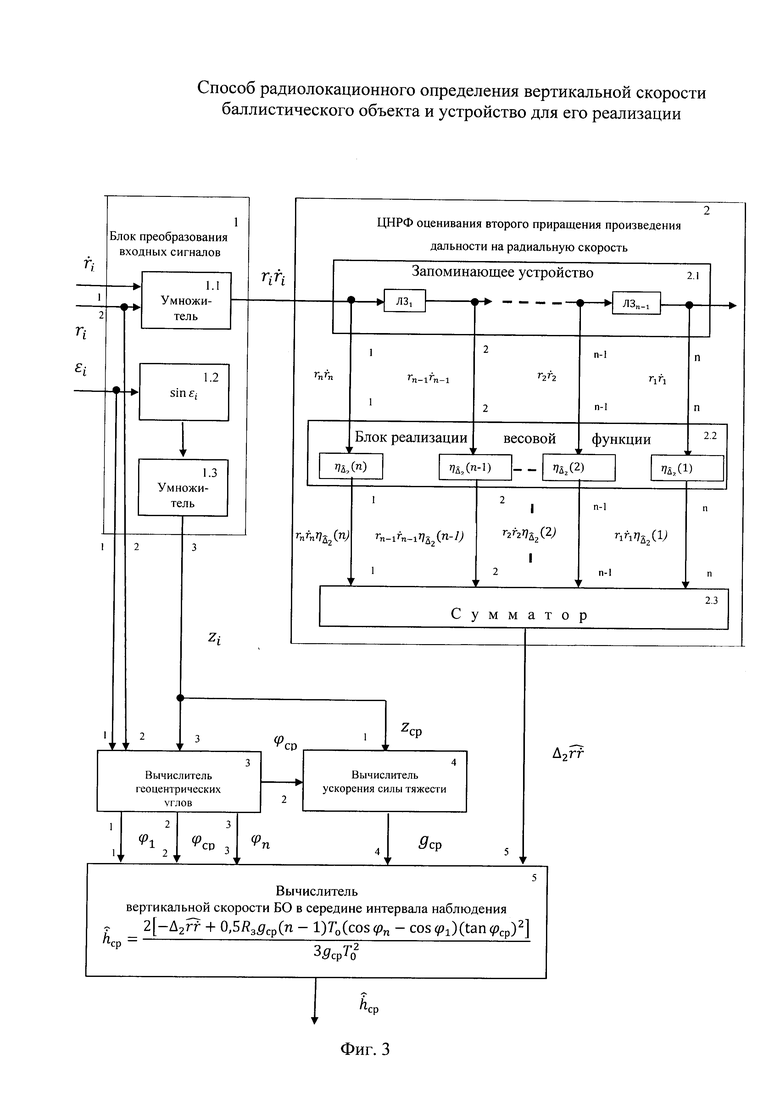
Указанный технический результат достигается также тем, что в первом варианте устройства радиолокационного определения вертикальной скорости баллистического объекта, содержащего последовательно соединенные блок преобразования входных сигналов, обеспечивающий определение высоты баллистического объекта, и цифровой нерекурсивный фильтр, обеспечивающий определение оценки приращения преобразованного сигнала за период обзора РЛС, согласно изобретению на вход блока преобразования входных сигналов подают данные измерений радиальной скорости баллистического объекта, в состав этого блока включают умножитель, обеспечивающий перемножение данных измерений дальности и радиальной скорости, выход умножителя соединен с входом запоминающего устройства цифрового нерекурсивного фильтра, обеспечивающего определение оценки второго приращения произведения дальности на радиальную скорость за период обзора РЛС, выход сумматора цифрового нерекурсивного фильтра соединен с входом вычислителя вертикальной скорости баллистического объекта, три других выхода блока преобразования входных сигналов соединены с тремя входами вычислителя геоцентрических углов, выходы которого соединены с входами вычислителя вертикальной скорости баллистического объекта, один из выходов блока преобразования входных сигналов соединен с первым входом вычислителя ускорения силы тяжести, второй вход которого соединен с вторым выходом вычислителя геоцентрических углов, а выход соединен с входом вычислителя вертикальной скорости баллистического объекта в середине интервала наблюдения, выход которого является выходом заявленного устройства.
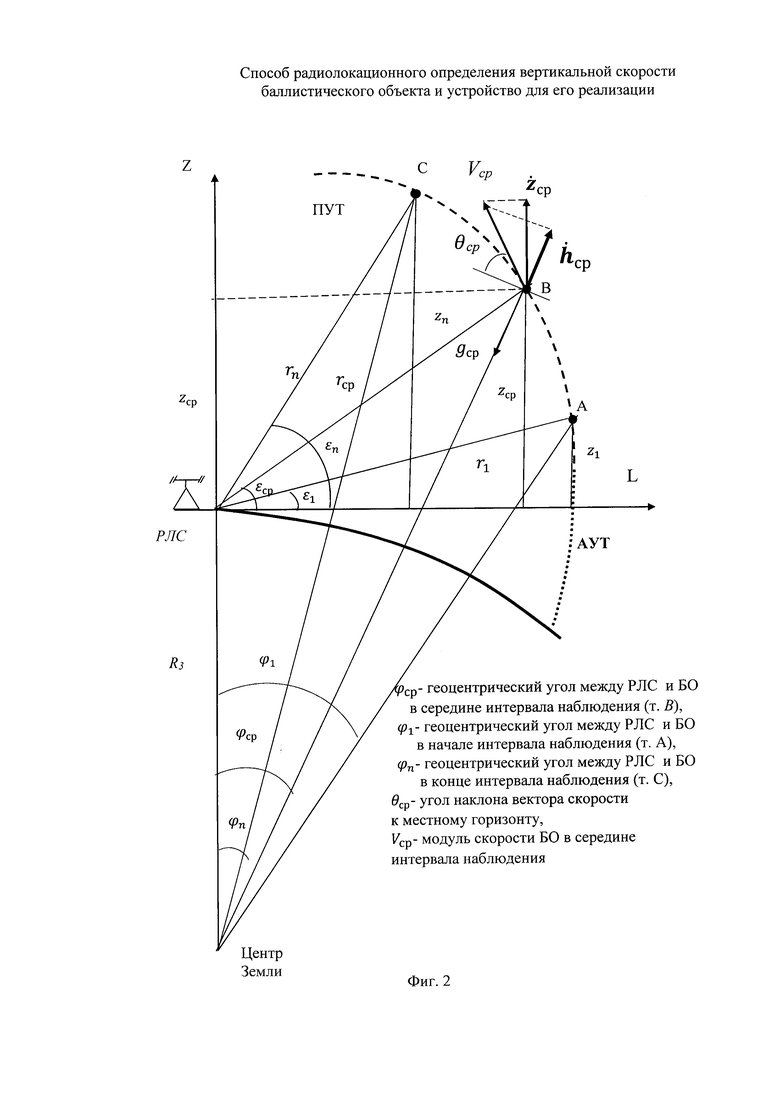
Сущность заявленного изобретения поясняется рисунком, приведенным в фиг. 2, и структурной схемой устройства, приведенной в фиг. 3.
Как видно из фиг. 2, в заявленном изобретении оценка вертикальной скорости  определяется в геоцентрической системе координат, а в прототипе оценка вертикальной скорости
определяется в геоцентрической системе координат, а в прототипе оценка вертикальной скорости  определяется в местной прямоугольной системе координат РЛС. Это является одним из достоинств заявленного изобретения, так как оценку
определяется в местной прямоугольной системе координат РЛС. Это является одним из достоинств заявленного изобретения, так как оценку  можно использовать непосредственно для расчета баллистической траектории и дальности до точки падения БО, а оценку
можно использовать непосредственно для расчета баллистической траектории и дальности до точки падения БО, а оценку  для решения этой задачи необходимо пересчитывать в геоцентрическую систему координат.
для решения этой задачи необходимо пересчитывать в геоцентрическую систему координат.
Для подтверждения фактического отсутствия систематической методической ошибки оценивания вычислим вертикальную скорость китайской баллистической ракеты средней дальности (БРСД) «Дунфэн-21» на 280-й секунде полета, траекторные параметры которой приведены в таблице 1.
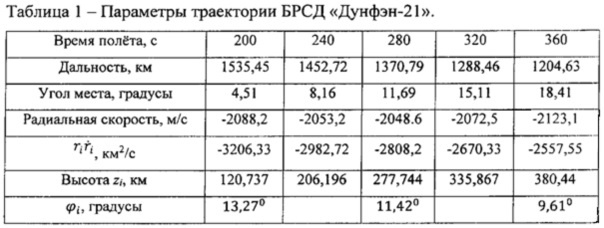


Как видно из приведенного примера, оценка практически равна табличному значению вертикальной скорости. Если в формуле не учитывать поправку  на сферичность Земли, то отрицательное смещение оценки (методическая ошибка) будет равно примерно 200 м/с (-201,4 м/с).
на сферичность Земли, то отрицательное смещение оценки (методическая ошибка) будет равно примерно 200 м/с (-201,4 м/с).
В прототипе оценка равна:  . По этой оценке угол наклона вектора скорости к местному горизонту определяется также без смещения:
. По этой оценке угол наклона вектора скорости к местному горизонту определяется также без смещения:  .
.
Величина случайной СКО оценивания вертикальной скорости в заявленном изобретении вычисляется по формуле:  , где
, где  - СКО измерения радиальной скорости [2, формула 4.37, С. 155]. Как видно из формулы, точность оценивания вертикальной скорости зависит от ошибок измерения радиальной скорости, а ошибки измерения угла места и дальности оказывают несущественное влияние.
- СКО измерения радиальной скорости [2, формула 4.37, С. 155]. Как видно из формулы, точность оценивания вертикальной скорости зависит от ошибок измерения радиальной скорости, а ошибки измерения угла места и дальности оказывают несущественное влияние.
В качестве примера, в таблице 2 приведены результаты сравнения точности оценивания вертикальной скорости оперативно-тактической ракеты (ОТБР) «Атакмс» на 75-й секунде полета ( ,
,  в заявляемом изобретении и в прототипе в РЛС МДВ «Резонанс-H»
в заявляемом изобретении и в прототипе в РЛС МДВ «Резонанс-H»  T0=5 c) [4, C. 356-361].
T0=5 c) [4, C. 356-361].
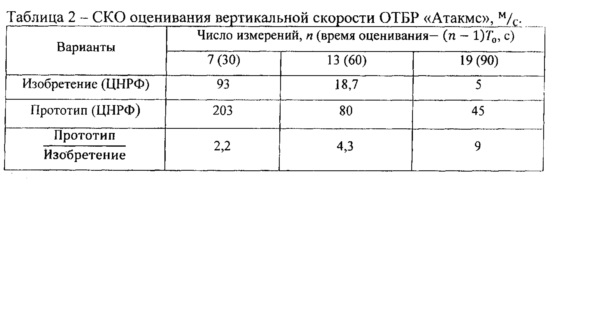
Как видно из таблицы, при высокоточных измерениях радиальной скорости ошибки оценивания вертикальной скорости уменьшаются от 2-х до 9-ти раз в зависимости от времени оценивания.
Как видно из фиг. 1 и фиг. 3, и в изобретении, и в прототипе определяют высоту БО (блоки 1). В ЦНРФ заявленного устройства (блок 2) оценивают второе приращения произведения дальности на радиальную скорость за период обзора РЛС. Для этого в блоке 2.2 реализации весовой функции хранят весовые коэффициенты, вычисленные по формуле:  [2, формула 4.37, С. 155]. Кроме того, в состав схемы заявленного устройства включены вычислители (блоки 3, 4 и 5) и умножитель дальности на радиальную скорость (блок 2.2).
[2, формула 4.37, С. 155]. Кроме того, в состав схемы заявленного устройства включены вычислители (блоки 3, 4 и 5) и умножитель дальности на радиальную скорость (блок 2.2).
Таким образом, первые варианты заявленных способа и устройства обеспечивают повышение в несколько раз точности определения вертикальной скорости по сравнению с прототипом и другими аналогами. Однако, заявленному варианту присущ следующий недостаток: необходимость хранения всех n значений дальности и радиальной скорости фиксированной выборки. При одновременном обслуживании большого числа целей и при больших интервалах наблюдения это приводит к существенному увеличению емкости запоминающих устройств.
Техническим результатом второго варианта заявленных способа и устройства является уменьшение объема хранимых предыдущих измерений дальности и радиальной скорости, а также повышение точности определения вертикальной скорости БО.
Указанный технический результат достигается тем, что во втором варианте заявленного способа радиолокационного определения вертикальной скорости баллистического объекта согласно изобретению оценку второго приращения произведения дальности на радиальную скорость  за период обзора РЛС определяют с помощью ∝, β, γ фильтра. При этом по первым трем значениям произведений дальности на радиальную скорость
за период обзора РЛС определяют с помощью ∝, β, γ фильтра. При этом по первым трем значениям произведений дальности на радиальную скорость  определяют начальные значения сглаживаемых параметров, то есть начальное значение произведения дальности на радиальную скорость
определяют начальные значения сглаживаемых параметров, то есть начальное значение произведения дальности на радиальную скорость  , начальное значение первого приращения произведения дальности на радиальную скорость
, начальное значение первого приращения произведения дальности на радиальную скорость  и начальное значение второго приращения произведения дальности на радиальную скорость
и начальное значение второго приращения произведения дальности на радиальную скорость  и задают начальные значения коэффициентов сглаживания ∝=1, β=1 и γ=1. Далее в следующих обзорах (n=4, 5, … N) значения коэффициентов сглаживания определяют по формулам
и задают начальные значения коэффициентов сглаживания ∝=1, β=1 и γ=1. Далее в следующих обзорах (n=4, 5, … N) значения коэффициентов сглаживания определяют по формулам  и
и  , где n - номер обзора, определяют экстраполированное значение произведения дальности на радиальную скорость для n-го обзора путем суммирования предыдущих (n-1)-x оценок произведений дальности на радиальную скорость, первого и второго приращений произведения дальности на радиальную скорость, а также определяют экстраполированное значение первого приращения произведения дальности на радиальную скорость для n-го обзора путем суммирования предыдущей (n-1)-й оценки первого приращения произведения дальности на радиальную скорость и удвоенного значения оценки второго приращения произведения дальности на радиальную скорость. Затем определяют сигнал ошибки, то есть разность между текущим значением произведения дальности на радиальную скорость и его экстраполированным значением, определяют текущую оценку произведения дальности на радиальную скорость путем суммирования экстраполированного значения произведения дальности на радиальную скорость и взвешенного коэффициентом сглаживания ∝ сигнала ошибки, а также текущую оценку первого приращения произведения дальности на радиальную скорость путем суммирования экстраполированного значения первого приращения произведения дальности на радиальную скорость и взвешенного коэффициентом сглаживания β сигнала ошибки. В итоге текущую оценку второго приращения произведения дальности на радиальную скорость определяют путем суммирования предыдущей (n-1)-й оценки второго приращения произведения дальности на радиальную скорость и взвешенного коэффициентом сглаживания γ сигнала ошибки.
, где n - номер обзора, определяют экстраполированное значение произведения дальности на радиальную скорость для n-го обзора путем суммирования предыдущих (n-1)-x оценок произведений дальности на радиальную скорость, первого и второго приращений произведения дальности на радиальную скорость, а также определяют экстраполированное значение первого приращения произведения дальности на радиальную скорость для n-го обзора путем суммирования предыдущей (n-1)-й оценки первого приращения произведения дальности на радиальную скорость и удвоенного значения оценки второго приращения произведения дальности на радиальную скорость. Затем определяют сигнал ошибки, то есть разность между текущим значением произведения дальности на радиальную скорость и его экстраполированным значением, определяют текущую оценку произведения дальности на радиальную скорость путем суммирования экстраполированного значения произведения дальности на радиальную скорость и взвешенного коэффициентом сглаживания ∝ сигнала ошибки, а также текущую оценку первого приращения произведения дальности на радиальную скорость путем суммирования экстраполированного значения первого приращения произведения дальности на радиальную скорость и взвешенного коэффициентом сглаживания β сигнала ошибки. В итоге текущую оценку второго приращения произведения дальности на радиальную скорость определяют путем суммирования предыдущей (n-1)-й оценки второго приращения произведения дальности на радиальную скорость и взвешенного коэффициентом сглаживания γ сигнала ошибки.
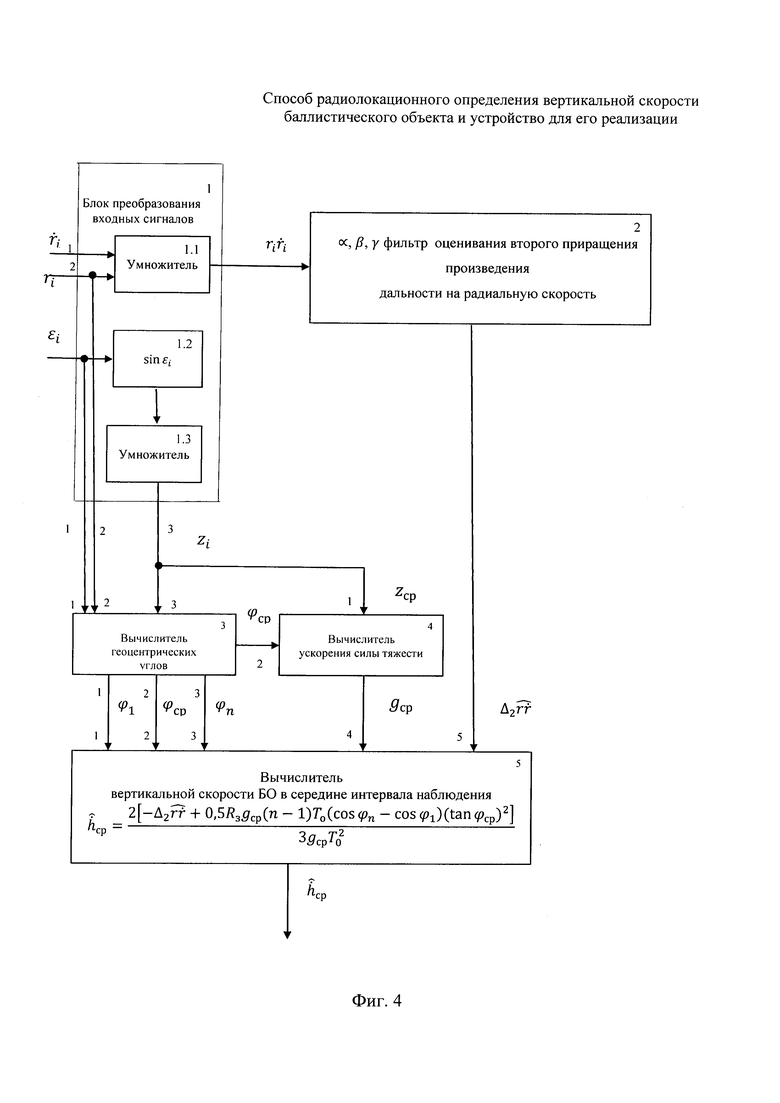
Указанный технический результат достигается также тем, что во втором варианте заявленного устройства радиолокационного определения вертикальной скорости баллистического объекта согласно изобретению в состав устройства включают α, β, γ фильтр для определение оценки второго приращения произведения дальности на радиальную скорость за период обзора РЛС.
Структурная схема второго варианта заявленного устройства приведена в фиг. 4. В отличие от первого варианта, блок 2 является α, β, γ фильтром. Структурная схема и работа α, β, γ фильтра, называемого также фильтром «скользящего» сглаживания параметров квадратичной траектории, подробно описана в известной литературе [3, рис. 9.14, С. 392].
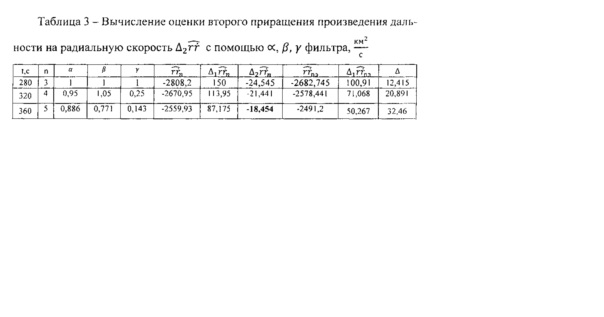
Для доказательства практического отсутствия методических ошибок вычислим значение вертикальной скорости БРСД «Дунфэн-21» с помощью α, β, γ фильтра.
где  - текущая оценка произведения дальности на радиальную скорость в n-м обзоре;
- текущая оценка произведения дальности на радиальную скорость в n-м обзоре;
 - текущая оценка первого приращения произведения дальности на радиальную скорость;
- текущая оценка первого приращения произведения дальности на радиальную скорость;
 - текущая оценка второго приращения произведения дальности на радиальную скорость;
- текущая оценка второго приращения произведения дальности на радиальную скорость;
 - экстрполированное значение произведения дальности на радиальную скорость;
- экстрполированное значение произведения дальности на радиальную скорость;
 - экстраполированное значение первого приращения произведения дальности на радиальную скорость;
- экстраполированное значение первого приращения произведения дальности на радиальную скорость;
 - значение сигнала ошибки между текущим значением произведения дальности на радиальную скорость и его экстраполированным значением.
- значение сигнала ошибки между текущим значением произведения дальности на радиальную скорость и его экстраполированным значением.
Как видно из таблицы 3, текущие оценки второго приращения произведения дальности на радиальную скорость на 360-й секунде, вычисленные первым и вторым вариантами заявленного способа, практически одинаковы. Следовательно, методической ошибки нет.
В отличие от первого варианта существенно уменьшен объем хранимых предыдущих измерений. Во втором варианте для определения оценки второго приращения произведения дальности на радиальную скорость используются только измерения в текущем обзоре и оценки в предыдущем обзоре. В прототипе хранится вся фиксированная выборка измерений.
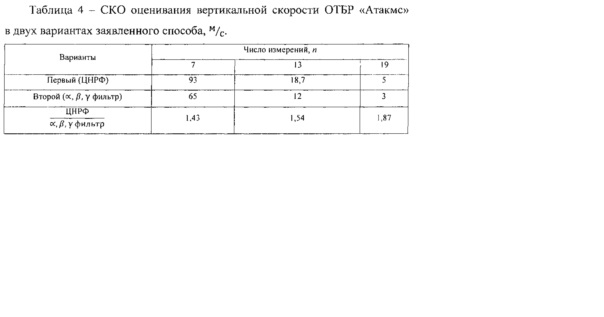
Кроме того, во втором варианте заявленного устройства на 40-80% по сравнению с первым вариантом повышается точность определения вертикальной скорости.
В качестве примера, в таблице 4 приведены результаты сравнения точности оценивания вертикальной скорости ОТБР «Атакмс» в первом варианте (ЦНРФ) и во втором варианте (∝, β, γ фильтр) заявленных способа и устройства. СКО вертикальной скорости во втором варианте вычислялись по формуле:  [3, формула 9.6.38, С. 396].
[3, формула 9.6.38, С. 396].
Таким образом, достигнут технический результат заявленного изобретения: повышена точность определения вертикальной скорости БО в середине интервала наблюдения на пассивном невозмущенном участке баллистической траектории при грубых измерениях угла места и относительно высокоточных измерениях радиальной скорости и уменьшен объем хранимых предыдущих измерений дальности и радиальной скорости.
Список использованных источников
1. Кузьмин С.З. Цифровая обработка радиолокационной информации. М: «Советское радио», 1967, 400 с.
2. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. М.: «Радио и связь», 1986, 352 с.
3. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М: «Советское радио», 1974, 432 с.
4. Вооружение ПВО и РЭС России. Альманах. М.: Издательство НО «Лига содействия оборонным предприятиям», 2011, 504 с.)
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения модуля скорости баллистического объекта с использованием выборки произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2634479C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ ЕЕ РАДИАЛЬНОЙ СКОРОСТИ | 2021 |
|
RU2797227C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ЕЕ РАДИАЛЬНОГО УСКОРЕНИЯ ПРИ НЕОДНОЗНАЧНЫХ ИЗМЕРЕНИЯХ РАДИАЛЬНОЙ СКОРОСТИ | 2021 |
|
RU2796965C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ВЫБОРКИ КВАДРАТОВ ДАЛЬНОСТИ | 2015 |
|
RU2658317C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ НЕОДНОЗНАЧНЫХ ИЗМЕРЕНИЯХ ДОПЛЕРОВСКОЙ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2796966C1 |
| ОБНАРУЖИТЕЛЬ МАНЕВРА БАЛЛИСТИЧЕСКОЙ РАКЕТЫ ПО ФИКСИРОВАННОЙ ВЫБОРКЕ ПРОИЗВЕДЕНИЙ ДАЛЬНОСТИ НА РАДИАЛЬНУЮ СКОРОСТЬ | 2016 |
|
RU2635657C2 |
| Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2644588C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА | 2015 |
|
RU2607358C1 |
| Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности | 2016 |
|
RU2621692C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПУТЕВОЙ СКОРОСТИ НЕМАНЕВРИРУЮЩЕЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ЕЕ РАДИАЛЬНОГО УСКОРЕНИЯ | 2021 |
|
RU2782527C1 |
Изобретение относится к области радиолокации. Технический результат изобретения - повышение точности определения вертикальной скорости баллистического объекта (БО) в наземных радиолокационных станциях (РЛС) с грубыми измерениями угла места и дальности. Указанный технический результат достигается тем, что оценивают второе приращение произведения дальности на радиальную скорость  за период обзора РЛС Т0 с помощью цифрового нерекурсивного фильтра (ЦНРФ) или ∝, β, γ фильтра. Измеряют высоту БО в середине
за период обзора РЛС Т0 с помощью цифрового нерекурсивного фильтра (ЦНРФ) или ∝, β, γ фильтра. Измеряют высоту БО в середине  , в начале
, в начале  и в конце zn интервала наблюдения. Вычисляют геоцентрические углы между РЛС и БО в середине ϕср, в начале ϕ1 и в конце ϕn интервала наблюдения, а также ускорение силы тяжести
и в конце zn интервала наблюдения. Вычисляют геоцентрические углы между РЛС и БО в середине ϕср, в начале ϕ1 и в конце ϕn интервала наблюдения, а также ускорение силы тяжести  в середине интервала наблюдения. Вычисляют сглаженное значение вертикальной скорости БО в середине интервала наблюдения на невозмущенном пассивном участке траектории по формуле
в середине интервала наблюдения. Вычисляют сглаженное значение вертикальной скорости БО в середине интервала наблюдения на невозмущенном пассивном участке траектории по формуле  . Основу устройства для реализации заявленного способа образует ЦНРФ. 2 н.п. ф-лы, 4 ил., 4 табл.
. Основу устройства для реализации заявленного способа образует ЦНРФ. 2 н.п. ф-лы, 4 ил., 4 табл.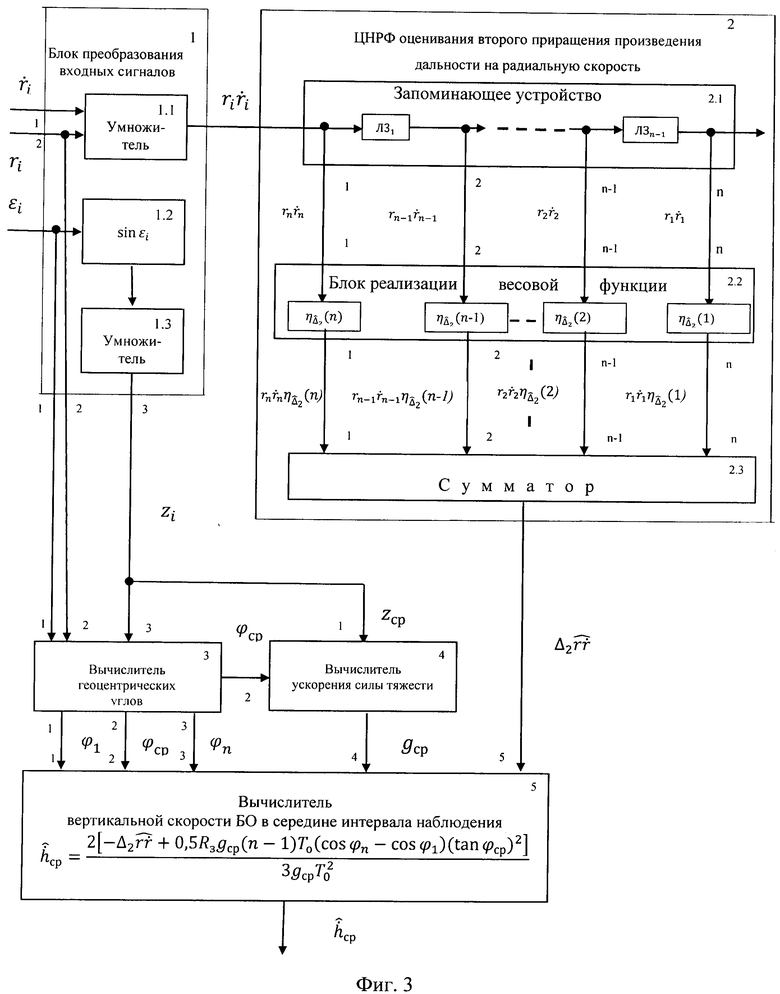
1. Способ радиолокационного определения вертикальной скорости баллистического объекта, включающий преобразование входных сигналов, определение оценки приращения преобразованных сигналов за период обзора РЛС Т0 и высоты баллистического объекта по данным измерений его дальности и угла места, отличающийся тем, что в качестве входных сигналов используют данные измерений радиальной скорости, при преобразовании входных сигналов перемножают данные измерений дальности и радиальной скорости и получают произведения дальности на радиальную скорость, формируют фиксированную выборку произведений дальности на радиальную скорость, по этой фиксированной выборке определяют с помощью цифрового нерекурсивного фильтра оценку второго приращения произведения дальности на радиальную скорость  за период обзора РЛС, по результатам измерений угла места и дальности определяют высоту баллистического объекта в середине интервала наблюдения zcp=rcpsinεcp, в начале интервала наблюдения z1=r1sinε1 и в конце интервала наблюдения zn=rnsinεn, где rcp, r1, rn - дальности в середине, в начале и в конце интервала наблюдения, εср, ε1, εn - углы места в середине, в начале и в конце интервала наблюдения, определяют геоцентрический угол между радиолокационной станцией и баллистическим объектом в середине интервала наблюдения
за период обзора РЛС, по результатам измерений угла места и дальности определяют высоту баллистического объекта в середине интервала наблюдения zcp=rcpsinεcp, в начале интервала наблюдения z1=r1sinε1 и в конце интервала наблюдения zn=rnsinεn, где rcp, r1, rn - дальности в середине, в начале и в конце интервала наблюдения, εср, ε1, εn - углы места в середине, в начале и в конце интервала наблюдения, определяют геоцентрический угол между радиолокационной станцией и баллистическим объектом в середине интервала наблюдения  , где R3 - радиус Земли, определяют ускорение силы тяжести в середине интервала наблюдения
, где R3 - радиус Земли, определяют ускорение силы тяжести в середине интервала наблюдения  , где g0 - ускорение силы тяжести на поверхности Земли, определяют геоцентрические углы между радиолокационной станцией и баллистическим объектом в начале интервала наблюдения
, где g0 - ускорение силы тяжести на поверхности Земли, определяют геоцентрические углы между радиолокационной станцией и баллистическим объектом в начале интервала наблюдения  и в конце интервала наблюдения
и в конце интервала наблюдения  , в итоге определяют оценку, то есть сглаженное значение вертикальной скорости в середине интервала наблюдения на невозмущенном участке баллистической траектории по формуле
, в итоге определяют оценку, то есть сглаженное значение вертикальной скорости в середине интервала наблюдения на невозмущенном участке баллистической траектории по формуле

2. Устройство радиолокационного определения вертикальной скорости баллистического объекта, содержащее последовательно соединенные блок преобразования входных сигналов, обеспечивающий определение высоты баллистического объекта, и цифровой нерекурсивный фильтр, обеспечивающий определение оценки приращения преобразованного сигнала за период обзора РЛС, отличающееся тем, что на вход блока преобразования входных сигналов подают данные измерений радиальной скорости баллистического объекта, в состав этого блока включают умножитель, обеспечивающий перемножение данных измерений дальности и радиальной скорости, выход умножителя соединен с входом запоминающего устройства цифрового нерекурсивного фильтра, обеспечивающего определение оценки второго приращения произведения дальности на радиальную скорость за период обзора РЛС, выход цифрового нерекурсивного фильтра соединен с входом вычислителя вертикальной скорости баллистического объекта, три других выхода блока преобразования входных сигналов соединены с тремя входами вычислителя геоцентрических углов, выходы которого соединены с входами вычислителя вертикальной скорости баллистического объекта, один из выходов блока преобразования входных сигналов соединен с первым входом вычислителя ускорения силы тяжести, второй вход которого соединен с вторым выходом вычислителя геоцентрических углов, а выход соединен с входом вычислителя вертикальной скорости баллистического объекта в середине интервала наблюдения, выход которого является выходом заявленного устройства.
| КУЗЬМИН С.З | |||
| Цифровая обработка радиолокационной информации | |||
| Москва, "Советское радио", 1967, с.303-304, 308, рис.4.7 | |||
| RU 2012148223 A, 20.05.2014 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2540323C1 |
| US 6082666 A, 04.07.2000 | |||
| US 8138965 B1, 20.03.2012 | |||
| JP 2001330656 A, 30.11.2001 | |||
| US 20050012657 A1, 20.05.2005. | |||

