Изобретение относится к области радиолокации и может быть использовано для определения модуля скорости баллистического объекта (БО) на невозмущенном пассивном участке (ПУТ) баллистической траектории с помощью наземных радиолокационных станций (РЛС) с грубыми измерениями угла места, азимута и дальности.
Известны способы, в которых измеряют скорости изменения декартовых координат (


Недостатком этих способов является низкая точность определения модуля скорости БО с помощью РЛС с грубыми измерениями угла места и азимута. При этом доминирующее влияние на точность определения модуля скорости оказывают ошибки измерения угла места (высоты) БО (Патент RU 2540323).
Наиболее близким заявляемому способу, то есть прототипом, является способ определения модуля скорости БО по выборкам квадратов дальности и высоты (Способ определения модуля скорости баллистической цели в наземной радиолокационной станции. Патент RU 2540323).
В РЛС через интервалы времени, равные периоду обзора Т0, измеряют дальность и высоту БО, производят преобразование измерений дальности и высоты в цифровые сигналы, формируют фиксированную выборку N оцифрованных сигналов высоты, определяют оценку высоты БО в середине интервала наблюдения 
 где rcp - дальность до БО в середине интервала наблюдения, Rз - радиус Земли (блок 13 фиг. 1). Определяют ускорение силы тяжести в середине интервала наблюдения по формуле
где rcp - дальность до БО в середине интервала наблюдения, Rз - радиус Земли (блок 13 фиг. 1). Определяют ускорение силы тяжести в середине интервала наблюдения по формуле  где g0 - ускорение силы тяжести на поверхности Земли (блок 14 фиг. 1). В каждом обзоре перемножают оцифрованные сигналы дальности, то есть определяют квадраты дальности (блок 2 фиг. 1), формируют фиксированную выборку N оцифрованных сигналов квадратов дальности, производят взвешенное суммирование N оцифрованных сигналов квадратов дальности и определяют оценку второго приращения квадрата дальности
где g0 - ускорение силы тяжести на поверхности Земли (блок 14 фиг. 1). В каждом обзоре перемножают оцифрованные сигналы дальности, то есть определяют квадраты дальности (блок 2 фиг. 1), формируют фиксированную выборку N оцифрованных сигналов квадратов дальности, производят взвешенное суммирование N оцифрованных сигналов квадратов дальности и определяют оценку второго приращения квадрата дальности 
 (блок 15 фиг. 1).
(блок 15 фиг. 1).
При высокоточных измерениях дальности (среднеквадратические ошибки (СКО) σr=25 м) точность определения модуля скорости ВО типа ракеты «Скад» с помощью РЛС метрового диапазона «Резонанс-НЭ» с грубыми измерениями угла места и азимута (ошибки измерения угла места и азимута - 1,5 градуса) повышается примерно в 8 раз по сравнению со способом оценивания по выборкам декартовых координат.
Однако при грубых измерениях дальности преимущество способа-прототипа практически утрачивается. Например, при σr=300 м и времени оценивания 30 секунд СКО определения модуля скорости увеличиваются с 19 м/с при σr=25 м до 282 м/с, то есть становятся больше ошибок определения модуля скорости (
Техническим результатом заявляемого изобретения является повышение точности определения модуля скорости БО за счет уменьшения влияния ошибок измерения дальности.
Указанный технический результат достигается тем, что в способе радиолокационного определения модуля скорости баллистического объекта, заключающемся в том, что через интервалы времени, равные периоду обзора Т0, в радиолокационной станции измеряют дальность и высоту БО, производят преобразование измерений дальности и высоты в цифровые сигналы, формируют фиксированную выборку N оцифрованных сигналов высоты БО, производят взвешенное суммирование N оцифрованных сигналов высоты и определяют оценку 
 где rcp - дальность до БО в середине интервала наблюдения, Rз - радиус Земли, определяют ускорение силы тяжести в середине интервала наблюдения по формуле
где rcp - дальность до БО в середине интервала наблюдения, Rз - радиус Земли, определяют ускорение силы тяжести в середине интервала наблюдения по формуле  где g0 - ускорение силы тяжести на поверхности Земли. Согласно изобретению в каждом обзоре измеряют радиальную скорость БО, производят преобразование измерений радиальной скорости в цифровые сигналы, перемножают цифровые сигналы радиальной скорости на цифровые сигналы дальности. Затем формируют фиксированную выборку из N оцифрованных сигналов произведений дальности на радиальную скорость, производят взвешенное суммирование N оцифрованных сигналов произведений дальности на радиальную скорость и определяют оценку первого приращения произведения дальности на радиальную скорость
где g0 - ускорение силы тяжести на поверхности Земли. Согласно изобретению в каждом обзоре измеряют радиальную скорость БО, производят преобразование измерений радиальной скорости в цифровые сигналы, перемножают цифровые сигналы радиальной скорости на цифровые сигналы дальности. Затем формируют фиксированную выборку из N оцифрованных сигналов произведений дальности на радиальную скорость, производят взвешенное суммирование N оцифрованных сигналов произведений дальности на радиальную скорость и определяют оценку первого приращения произведения дальности на радиальную скорость 

Для доказательства реализуемости заявленного технического результата в таблице приведены результаты сравнения точности определения модуля скорости БО, типа ракеты «Скад», в РЛС «Резонанс-НЭ» различными способами.
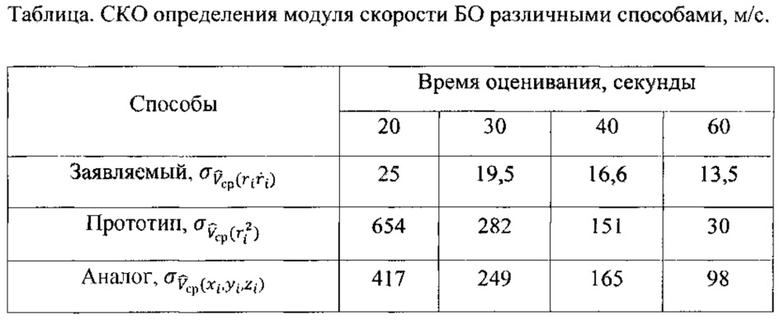
Как видно из таблицы, точность определения модуля скорости в РЛС «Резонанс-НЭ» заявляемым способом по сравнению со способом-прототипом повышается почти в 15 раз при времени оценивания 30 секунд. При этом, в отличие от прототипа, при увеличении ошибок измерения дальности в 12 раз (с σr=25 м до σr=300 м) точность определения модуля скорости уменьшилась только на 10 процентов, а не в 8 раз, как в прототипе.
Значения СКО определения модуля скорости ракеты «Скад» в РЛС «Резонанс-НЭ» (ошибки измерения угла места и азимута σε=σβ=1,5 градуса, дальности σr=300 м, радиальной скорости 

где rcp=330,25 км - дальность БО в середине интервала наблюдения;
εср=6,2° - угол места БО в середине интервала наблюдения;
gcp=9,69 м/с2 - ускорение силы тяжести в середине интервала наблюдения;
Vcp=1436 м/с - модуль скорости БО в середине интервала наблюдения (там же, таблица 2, фиг. 5).
Значения СКО измерения угла места, дальности и радиальной скорости РЛС метрового диапазона «Резонанс-НЭ» приведены в альманахе «Вооружение ПВО и РЭС России» (М.: Издательство НО «Лига содействия оборонным предприятиям», 2011, с. 356-361).
Так же, как в прототипе, практически отсутствуют методические ошибки при определении модуля скорости в середине интервала наблюдения на невозмущенном пассивном участке траектории. Заявляемый способ также нельзя использовать на активном участке траектории и при совершении БО маневра на пассивном участке траектории. Для определения времени окончания активного участка траектории можно использовать изобретение «Способ радиолокационного определения времени окончания активного участка баллистической траектории» (патент RU №2509319), а для выявления маневра БО на пассивном участке траектории - изобретение «Способ радиолокационного обнаружения маневра баллистической цели на пассивном участке траектории» (патент RU №2524208).
Сущность заявляемого способа поясняется схемой, приведенной на фигуре 2, где
1 - измеритель дальности (блок);
2 - измеритель высоты (блок);
3 - измеритель угла места (блок);
4 - запоминающее устройство;
5 - блок умножителей (блок);
6 - блок весовых коэффициентов оценки высоты в середине интервала наблюдения (блок);
7 - сумматор;
8 - вычислитель геоцентрического угла (вычислитель);
9 - вычислитель ускорения силы тяжести (вычислитель);
10 - умножитель (блок);
11 - запоминающее устройство;
12 - блок умножителей (блок);
13 - блок весовых коэффициентов оценки первого приращения в середине интервала наблюдения (блок);
14 - сумматор;
15 - вычислитель модуля скорости;
16 - измеритель радиальной скорости (блок).
В блоках 1-9 так же, как в прототипе, определяют оценку высоты БО в середине интервала наблюдения путем взвешенного суммирования N оцифрованных измерений высоты и вычисляют геоцентрический угол между РЛС и БО в середине интервала наблюдения и ускорение силы тяжести.
В отличие от прототипа в схему введен измеритель радиальной скорости (блок 16). В умножителе перемножают оцифрованные сигналы радиальной скорости и дальности. В блоке весовых коэффициентов (13) определяют весовые коэффициенты оценки первого приращения произведения дальности на радиальную скорость в середине интервала наблюдения по формуле:  , где i - порядковый номер произведения дальности на радиальную скорость в фиксированной выборке.
, где i - порядковый номер произведения дальности на радиальную скорость в фиксированной выборке.
На входе сумматора 14 формируется фиксированная выборка сигналов взвешенных произведений дальности на радиальную скорость, а на выходе сумматора получают оценку первого приращения произведения дальности на радиальную скорость в середине интервала наблюдения, которую подают на вычислитель модуля скорости. На три других входа вычислителя, так же, как в прототипе, подают оценку высоты БО, значения геоцентрического угла и ускорения силы тяжести. Выход этого вычислителя является выходом устройства определения модуля скорости БО.
К основным признакам, которые отличают изобретение от прототипа, а также характеризуют новизну изобретения, относятся следующие действия с оцифрованными радиолокационными сигналами:
- измерение радиальной скорости и преобразование этих измерений в цифровые сигналы;
- перемножение цифровых сигналов радиальной скорости на цифровые сигналы дальности в каждом обзоре;
- формирование фиксированной выборки из N оцифрованных сигналов произведений дальности на радиальную скорость;
- взвешенное суммирование N оцифрованных сигналов произведений дальности на радиальную скорость и определение оценки первого приращения 
Таким образом, повышение точности определения модуля скорости баллистического объекта в середине интервала наблюдения на невозмущенном пассивном участке баллистической траектории в наземных РЛС с грубыми измерениями угла места, азимута и дальности достигается за счет использования фиксированных выборок произведений высокоточных измерений радиальной скорости на измерения дальности.
Изобретение относится к радиолокации. Технический результат изобретения - повышение точности определения модуля скорости баллистического объекта (БО) в наземных радиолокационных станциях (РЛС) с грубыми измерениями угла места, азимута и дальности. Указанный результат достигается тем, что через интервалы времени, равные периоду обзора Т0, в РЛС измеряют дальность, радиальную скорость и высоту БО. Определяют оценку высоты БО в середине интервала наблюдения  путем взвешенного суммирования N оцифрованных измерений высоты. Определяют оценку первого приращения произведения дальности на радиальную скорость
путем взвешенного суммирования N оцифрованных измерений высоты. Определяют оценку первого приращения произведения дальности на радиальную скорость  за обзор путем взвешенного суммирования N оцифрованных сигналов произведений дальности на радиальную скорость. Определяют геоцентрический угол между РЛС и БО в середине интервала наблюдения по формуле
за обзор путем взвешенного суммирования N оцифрованных сигналов произведений дальности на радиальную скорость. Определяют геоцентрический угол между РЛС и БО в середине интервала наблюдения по формуле  где rср - дальность до БО в середине интервала наблюдения, Rз - радиус Земли. Определяют ускорение силы тяжести в середине интервала наблюдения по формуле
где rср - дальность до БО в середине интервала наблюдения, Rз - радиус Земли. Определяют ускорение силы тяжести в середине интервала наблюдения по формуле  где g0 - ускорение силы тяжести на поверхности Земли. Определяют значение модуля скорости БО в середине интервала наблюдения на невозмущенной баллистической траектории по формуле
где g0 - ускорение силы тяжести на поверхности Земли. Определяют значение модуля скорости БО в середине интервала наблюдения на невозмущенной баллистической траектории по формуле  1 табл., 2 ил.
1 табл., 2 ил.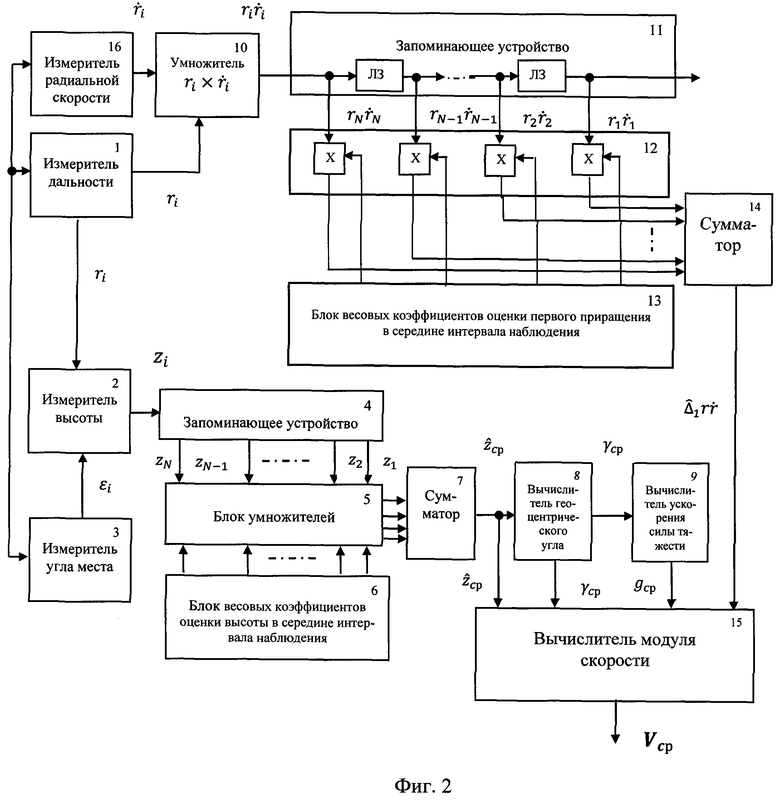
Способ радиолокационного определения модуля скорости баллистического объекта, заключающийся в том, что через интервалы времени, равные периоду обзора T0 радиолокационной станции, измеряют дальность и высоту баллистического объекта, производят преобразование измерений дальности и высоты в цифровые сигналы, формируют фиксированную выборку N оцифрованных сигналов высоты баллистического объекта, производят взвешенное суммирование N оцифрованных сигналов высоты и определяют оценку 
 где rcp - дальность до баллистического объекта в середине интервала наблюдения, Rз - радиус Земли, определяют ускорение силы тяжести в середине интервала наблюдения по формуле
где rcp - дальность до баллистического объекта в середине интервала наблюдения, Rз - радиус Земли, определяют ускорение силы тяжести в середине интервала наблюдения по формуле  где g0 - ускорение силы тяжести на поверхности Земли, отличающийся тем, что в каждом обзоре измеряют радиальную скорость баллистического объекта, производят преобразование измерений радиальной скорости в цифровые сигналы, перемножают цифровые сигналы радиальной скорости на цифровые сигналы дальности, формируют фиксированную выборку N оцифрованных сигналов произведений дальности на радиальную скорость, производят взвешенное суммирование N оцифрованных сигналов произведений дальности на радиальную скорость и определяют оценку первого приращения произведения дальности на радиальную скорость
где g0 - ускорение силы тяжести на поверхности Земли, отличающийся тем, что в каждом обзоре измеряют радиальную скорость баллистического объекта, производят преобразование измерений радиальной скорости в цифровые сигналы, перемножают цифровые сигналы радиальной скорости на цифровые сигналы дальности, формируют фиксированную выборку N оцифрованных сигналов произведений дальности на радиальную скорость, производят взвешенное суммирование N оцифрованных сигналов произведений дальности на радиальную скорость и определяют оценку первого приращения произведения дальности на радиальную скорость  за обзор, определяют значение модуля скорости баллистического объекта в середине интервала наблюдения на невозмущенной баллистической траектории по формуле
за обзор, определяют значение модуля скорости баллистического объекта в середине интервала наблюдения на невозмущенной баллистической траектории по формуле

| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2540323C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ВРЕМЕНИ ОКОНЧАНИЯ АКТИВНОГО УЧАСТКА БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ | 2012 |
|
RU2510861C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ВРЕМЕНИ КОРРЕКЦИИ ОТДЕЛЕНИЯ ГОЛОВНОЙ ЧАСТИ РАКЕТЫ | 2007 |
|
RU2362965C2 |
| WO2014098693 A1, 26.06.2014 | |||
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ВРЕМЕНИ ОКОНЧАНИЯ АКТИВНОГО УЧАСТКА БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ | 2012 |
|
RU2509319C1 |

