Изобретение относится к радиотехнике, системам позиционирования и навигации (определения координат), а именно к системам радиосвязи, которые путем осуществления радиоизмерений специальных радиосигналов передаваемых между стационарным и подвижными приемопередатчиками осуществляют расчет расстояния между ними. Особенностью данного способа навигации является его практическая применимость в протяженных объектах, а именно горных выработках шахт и рудников, транспортных туннелях, подземных коллекторах и т.п. технологических объектах. Под протяженным объектом в изобретении понимается такой объект, длина которого на несколько порядков больше ширины и высоты при этом ось такого протяженного объекта может быть не прямой. Кроме того, касательно навигации и позиционирования в протяженном объекте это означает, что в практических целях важно определять всего лишь одну координату, а именно расстояние по оси протяженного объекта между стационарным и подвижными приемопередатчиками.
Современные требования безопасности в шахтах во многих странах требуют обеспечить возможность непрерывного определения положения работников с нормируемой точностью. Так, например, точность позиционирования работников в российских шахтах должна быть ±20 метров, что сравнимо с точностью позиционирования бытовой версии GPS или ГЛОНАСС, а обновление данных о местонахождении должно быть не реже 1 раза в 5 секунд. Однако, системы аналогичные GPS не могут применяться в шахтах и рудниках, так как высокочастотные электромагнитные волны практически не проникают в землю, они затухают в горных породах, распространяясь на единицы метров и поэтому используют другие способы позиционирования в шахтах. Известны системы, например, «Горнасс», работающие на основе стационарных Wi-Fi ретрансляторов (точек доступа, базовых станций), расположенных на расстояниях от 50 до 300 м в зависимости от изменений формы и ориентации протяженного объекта в 3-х мерном пространстве. Амплитуда принимаемых ими сигналов от абонентов (подвижных приемопередатчиков), зависит от расстояния между ними. Эта зависимость положена в основу метода радиоизмерения расстояния RSSI (received signal strength indicator). Метод RSSI обладает несколькими недостатками: антенна абонентского передатчика может экранироваться телом абонента, что может привести к ошибке позиционирования; на амплитуду влияет ориентация антенны и диаграмма ее направленности; в протяженных объектах всегда не выполняется требование к отсутствию препятствий в зоне Френеля. Такая система слишком сложная и дорогая, так как требует большого количества базовых станций, чтобы обеспечить радиопокрытие всей горной выработки (шахты), которая может быть длиной несколько километров, при этом количество базовых станция для 5-километровой горной выработки составит 20-30 штук (для шахты целиком от 100 до нескольких тысяч).
Известны другие радиосистемы непрерывного позиционирования (на базе технологий ZigBee, NanoLOC), обеспечивающие способ определения координат на основе радиоизмерения времени задержки прохождения сигнала в прямом и обратном направлении - метод TWR (two way ranging) с ошибкой ±(3-5) м. Еще один способ (технологии NanoLOC, Decawave) основан на измерения разницы времен приема синхронизированных сигналов TDOA (time difference of arrival), в этом случае используется трилатерация и необходима синхронизация двух и более базовых станций, что позволяет уменьшить ошибку позиционирования до ±(0.1-1) м. Общим недостатком этих методов также является большое количество стационарного оборудования.
Между тем, известен способ фазовой радиодальнометрии, который, в частности, применяется в авиации для определения расстояния до самолета. Суть этого способа заключается в одновременной передаче одной антенной и приеме другой антенной отраженного (переизлученного) радиосигнала от подвижного объекта. Обычно такой ВЧ сигнал модулируют более низкочастотным сигналом и сравнивают фазу этого модулирующего сигнала на передатчике и приемнике. По разности фаз Δϕ этих двух сигналов определяют расстояние R между стационарным и подвижным объектом. Расстояние R и разность фаз связаны линейным соотношением, зависящим от длины волны и системного фазового сдвига в передатчике и приемнике.
В исходном виде метод фазовой дальнометрии, использующий УКВ системы, потребует усложнения известных систем связи, наличия двух отдельных антенн (приемной и передающей) на базовой станции и будет обладать вышеперечисленными недостатками - большим количеством оборудования и малым радиусом действия из-за невыполнения требований к отсутствию препятствий в зоне Френеля, наличию переотражений и переизлучений.
Однако, в настоящее время существуют системы связи для шахт, которые действуют на других принципах распространения радиосигналов, в частности, на распространении электромагнитных сигналов вдоль продольных направляющих - одномерные радиосистемы. Так, известен способ связи, использующий двухпроводную и трехпроводную линию для передачи радиосигналов вдоль горных выработок - Патент RU №2642845 «СПОСОБ И СИСТЕМА МОБИЛЬНОЙ СВЯЗИ ДЛЯ ПРОТЯЖЕННЫХ ОБЪЕКТОВ». В данной системе используется диапазон средних волн, которые, слабо затухая, распространяются вдоль таких двухпроводных линий на несколько километров. Так на частоте 1 МГц погонное затухание сигналов в двухпроводной линии в горной выработке будет примерно от 5 до 15 дБ/км в зависимости от окружающих горных пород. Такой способ связи позволяет создавать сложные многофункциональные системы связи для шахт в средневолновом диапазоне, как, например, указанную в Патенте RU №2672273 «КОММУНИКАЦИОННАЯ СИСТЕМА ДЛЯ ПОДЗЕМНЫХ СООРУЖЕНИЙ». Для осуществления классического способа фазовой радиодальнометрии необходимо сравнивать фазы гармонического передаваемого и принимаемого сигнала. Операции приема и передачи сигнала производятся одновременно, а при самом измерении важное условие - это синхронизация приемника и передатчика, что осуществляется автоматически, так как это одно устройство, а сам сигнал является отраженным или переизлученным, т.е. осуществляется условие когерентности сигналов.
Для того, чтобы добиться условия когерентности двух источников сигналов, необходимо добиться их синхронизации по фазе и частоте, что возможно способом построения радиосистемы, описываемым в Патенте RU №2377723 «СПОСОБ ПЕРЕДАЧИ ДИСКРЕТНЫХ СООБЩЕНИЙ ПО КАНАЛАМ РАДИОСВЯЗИ». При этом два радиопередатчика (стационарный и подвижный) работают в режиме абсолютного мирового или системного времени и поддерживают синхронизацию не только в момент передачи/приема сообщений (сигналов), но и в промежутке между сеансами связи.
Сущность представленного изобретения сводится к тому, что в радиосистеме, использующей распространение электромагнитных волн вдоль продольных проводников на расстояния в несколько километров применяется синхронизация абонентских приемопередатчиков (подвижных приемопередатчиков) с базовой станцией (стационарным приемопередатчиком), которая поддерживается в промежутках между передачей сигнала базовой станцией и ответной передачей сигнала от абонентского приемопередатчика. В такой радиосистеме происходит периодическая передача опорного измерительного радиосигнала стационарным базовым приемопередатчиком и последующее излучение опорного когерентного или квазикогерентного сигнала подвижным абонентским приемопередатчиком. Далее происходит определение разности фаз этих двух колебаний и вычисление на основе разности фаз расстояния между стационарным приемопередатчиком (с известными координатами) и подвижным абонентским приемопередатчиком. Таким образом, передача и прием когерентного сигнала для фазовой радиодальнометрии на базовой станции становится процессом разнесенным по времени, следовательно, достаточно одного антенно-фидерного устройства, а сигналы базовой станции и абонентского передатчика при поддержании необходимой синхронизации становятся когерентными или квазикогерентными.
В заявленном способе в качестве среды распространения электромагнитного сигнала используются продольные проводники, проложенные в протяженном объекте, например однопроводные линии по одному из бортов горной выработки в шахте, либо как в изобретении RU №2642845 двухпроводные линии по левому и правому борту горной выработки, или трехпроводные линии с дополнительным проводником наверху горной выработки. Размещенные вдоль данных продольных проводников стационарные и подвижные приемопередатчики возбуждают бегущую электромагнитную волну вдоль этих проводников. Такая электромагнитная волна возбуждается путем либо гальванического подключения к данным проводникам в случае со стационарными приемопередатчиками, либо с помощью малогабаритных антенн возбуждающих эти проводники если это подвижные приемопередатчики, например как указано в изобретении RU №2642845. Стационарный и подвижный приемопередатчики работают на передачу и прием, попеременно излучая и принимая гармонический сигнал, при этом синхронизация по частоте и фазе одного из приемопередатчиков с другим осуществляется постоянно вне зависимости от передачи или приема сообщения, либо вместо синхронизации по частоте и фазе одного приемопередатчика с другим он передает вместе с гармоническим сигналом для радиоизмерения информацию о фазе принятого ранее радиоизмерительного гармонического сигнала, при этом во всех случаях передача и прием сигнала для радиоизмерения происходит в заранее определенные моменты абсолютного всемирного и/или системного точного времени, а период цикла времени Т обмена радиоизмерительными сигналами между стационарным и подвижным приемопередатчиком выбирается меньше времени перемещения подвижного приемопередатчика на половину длины волны измерительного радиосигнала.
Под понятием «синхронизация» в данном изобретении понимается поддержание в абонентском приемопередатчике информации о текущем значении частоты и фазы опорного измерительного сигнала базовой станции - синхроинформации. Поддержание синхроинформации может быть осуществлено различными способами: формированием дифференциального сигнала - дополнительной информации к опорному колебанию абонентского приемопередатчика, показывающей насколько это колебание отличается от опорного измерительного сигнала базовой станции; корректировка самого опорного сигнала абонентского приемопередатчика в соответствии с параметрами сигнала базовой станции.
Под термином «квазикогерентные сигналы» в данном изобретении понимается рассмотрение двух сигналов, не совпадающих по частоте, но совпадающих по фазе на промежутке времени, в течение которого расхождением по фазе этих двух сигналов можно пренебречь. Т.е. длительность сравнительных и измерительных процедур двух сигналов обеспечивает расхождение фаз квазикогерентных сигналов меньше заданного значения.
Способ позиционирования сводится к периодической передаче базовой станцией опорного гармонического сигнала, приема этого сигнала абонентским приемопередатчиком, синхронизации абонентского приемопередатчика и передаче аналогичного когерентного или квазикогерентного сигнала на базовую станцию, которая сравнивает фазу принятого и переданного ранее опорного колебания и по разности фаз Δϕ этих колебаний вычисляет расстояние между абонентским приемопередатчиком и базовой станцией. Либо абонентский передатчик может передавать свое опорное колебание и одновременно информационный дифференциальный сигнал. Таким дифференциальным сигналом может быть информация о фазе опорного колебания базовой станции, принятого абонентским терминалом относительно своего колебания за одно или два последних измерения.
Т.е. изобретение можно сформулировать следующим образом - это способ навигации и измерения расстояний в протяженных объектах типа горных выработок шахт и рудников, туннелей, использующий способ фазовой радиодальнометрии и систему связи, когда определяется расстояние R от стационарного приемопередатчика до подвижного приемопередатчика путем радиоизмерения разности фаз Δϕ опорного передаваемого стационарным приемопередатчиком и принимаемого от подвижного приемопередатчика сигналов электромагнитного колебания, отличающийся тем, что в качестве среды распространения электромагнитного сигнала используются продольные проводники, проложенные в протяженном объекте, а стационарные и подвижные приемопередатчики возбуждают электромагнитную волну вдоль этих проводников, при этом стационарный и подвижный приемопередатчики работают на передачу и прием, попеременно излучая и принимая гармонический сигнал, при этом синхронизация по частоте и фазе одного из приемопередатчиков с другим осуществляется постоянно вне зависимости от передачи или приема сообщения, либо вместо синхронизации по частоте и фазе одного приемопередатчика с другим он передает вместе с гармоническим сигналом для радиоизмерения информацию о фазе принятого ранее радиоизмерительного гармонического сигнала, при этом во всех случаях передача и прием сигнала для радиоизмерения происходит в заранее определенные моменты абсолютного всемирного и/или системного точного времени, а период цикла времени Т обмена радиоизмерительными сигналами между стационарным и подвижным приемопередатчиком выбирается меньше времени перемещения подвижного приемопередатчика на половину длины волны измерительного радиосигнала.
Вычисление расстояния R между стационарным и подвижным приемопередатчиком можно вести двумя способами.
Первый способ: если продольная линия, вдоль которой распространяются электромагнитные волны в горной выработке, достаточно однородна чтобы можно было пренебречь эффектами отражения волн от неоднородностей линии, то можно использовать классическую формулу для фазовой дальнометрии  где λ - длина волны колебания в горной выработке, ϕs - системная задержка сигнала, выраженная в градусах в системе «базовая станция - абонентский приемопередатчик», Δϕ - измеренная разность фаз между опорными колебаниями стационарной базовой станции и подвижного абонентского приемопередатчика, выраженная в градусах. Значение ϕs может быть достаточно просто определено для каждой системы эмпирическим способом, для этого необходимо провести фазовые радиоизмерения на известном удалении X от базовой станции и вычесть из полученной фазовой задержки ожидаемую. Например, в непосредственной близости от базовой станции ожидаемая задержка будет равна нулю, таким образом проводя опыт возле базовой станции можно узнать значение системной задержки ϕs для дальнейших вычислений.
где λ - длина волны колебания в горной выработке, ϕs - системная задержка сигнала, выраженная в градусах в системе «базовая станция - абонентский приемопередатчик», Δϕ - измеренная разность фаз между опорными колебаниями стационарной базовой станции и подвижного абонентского приемопередатчика, выраженная в градусах. Значение ϕs может быть достаточно просто определено для каждой системы эмпирическим способом, для этого необходимо провести фазовые радиоизмерения на известном удалении X от базовой станции и вычесть из полученной фазовой задержки ожидаемую. Например, в непосредственной близости от базовой станции ожидаемая задержка будет равна нулю, таким образом проводя опыт возле базовой станции можно узнать значение системной задержки ϕs для дальнейших вычислений.
Т.е. вычисление дальности осуществляется по формуле 
 где λ - это длина электромагнитной волны, a ϕs это задержка фазы в системе стационарного и подвижного приемопередатчиков.
где λ - это длина электромагнитной волны, a ϕs это задержка фазы в системе стационарного и подвижного приемопередатчиков.
Второй способ: в случае неоднородности линии передачи будут происходить отражения бегущей электромагнитной волны и появление стоячих волн вдоль линии. При этом нарушается картина линейной зависимости измеренного фазового сдвига когерентных или квазикогерентных измерительных сигналов от расстояния между абонентским приемопередатчиком и базовой станцией. Неоднородность линии передачи зависит от расположения проводников линии относительно стенок горной выработки, неоднородности свойств горных пород, расположения металлических элементов крепи. В такой сложной горно-геологической обстановке для реализации изобретения необходимо провести калибровку горной выработки, а именно эмпирическим путем измерить и определить зависимость R(Δϕ).
Т.е. на протяженном объекте предварительно составляется экспериментальная зависимость R(Δϕ, λ), и определение дальности абонентского приемопередатчика относительно базовой станции осуществляется с использованием этой экспериментальной зависимости.
При использовании современной цифровой техники изобретение может быть реализовано различными известными средствами цифровой обработки сигналов (ЦОС).
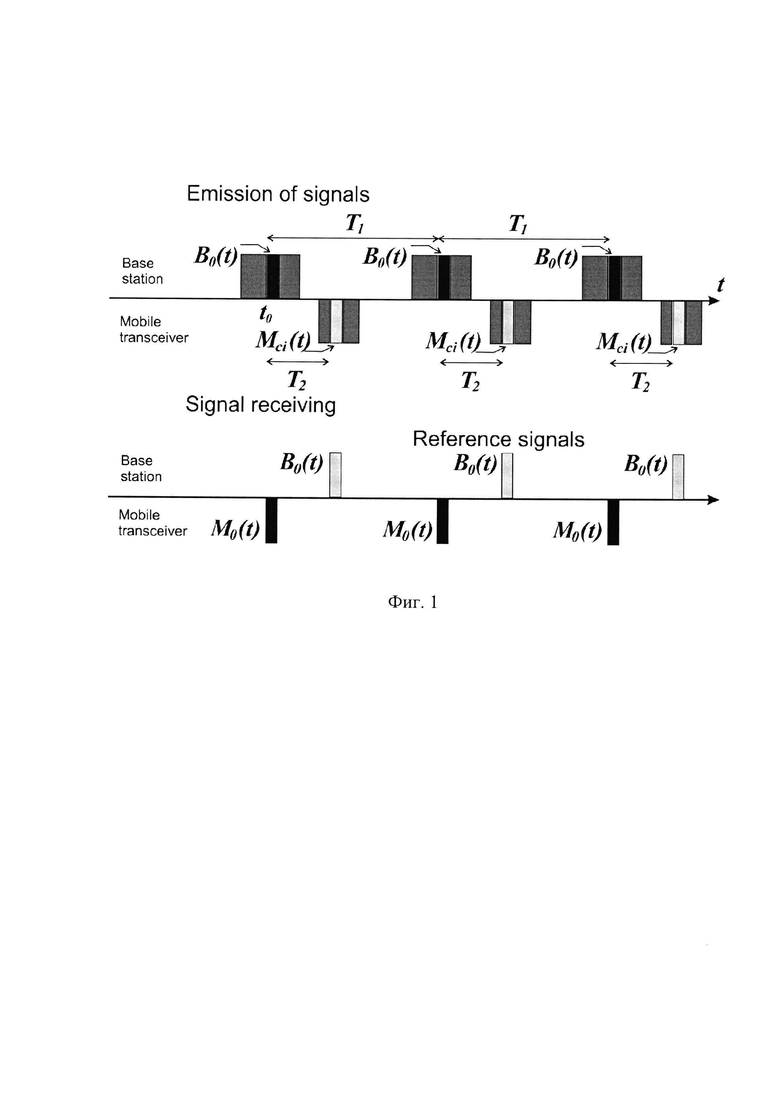
Рассмотрим для примера один из вариантов реализации способа позиционирования. На фигуре 1 представлен график возможной работы системы связи. Система связи работает в режиме временного разделения каналов. Базовая станция с периодом Т1 на частоте f1 передает в составе своего сообщения в установленное время гармонический опорный сигнал B0(t)=А×cos(2πf1t+δ1), который принимается абонентским приемопередатчиком и выполняется его сравнение с опорным сигналом на абонентском приемопередатчике M0(t)=А×cos(2π(f1+Δf)t+δ2), где Δf - разница частот колебаний между двумя приемопередатчиками. Тогда в момент времени t0 при самом первом измерении мы обнаружим Δθ0=2πΔft0+δ2-δ1, при втором измерении Δθ1=2πΔf(t0+T1)+δ2-δ1, при этом измерении Δθi-1=2πΔf(t0+T1×(i-1))+δ2-δ1. Разность между двумя измерениями обозначим Δϑj=Δθj-Δθj-1.
После передачи сигнала от базовой станцией через время Т2 передает сигнал абонентский передатчик. От абонентского приемопередатчика идет передача скорректированного сигнала Mci(t), который получается из M0(t), Mci(t)=M0(t-γi), где 
Следует отметить, что сигнал Mci(i) и сигнал B0(t) будут квазикогерентными, т.е. об их когерентности можно говорить только на протяжении периода измерения. Длительность посылки сигнала Mci(t) и измерения Mci(t) должна быть такой, чтобы разность фаз между Mci(t) и B0(t) вначале посылки Mci(t) и в конце (за период измерения) не превысила установленную погрешность измерения фазы. Таким образом, базовая станция принимает колебание Mci(t) и определяет разность фаз Δϕ между колебаниями Mci(t) и B0(t). А зная значение Δϕ в системе навигации можно вычислить расстояние R, которое зависит от времени распространения электромагнитных волн на маршруте «базовая станция - абонентский приемопередатчик - базовая станция» и системной задержки сигнала ϕs в приемниках и передатчиках, которая исключается при вычислении расстояния R.
Описанная выше реализация синхронизации опорного колебания абонентского приемопередатчика является комбинированной. В такой реализации синхронизация подразумевает наличие в абонентском приемопередатчике несинхронизированного по частоте и фазе сигнала М0(t) и информации о расхождении фаз и ее динамике (различие по частоте колебаний) между абонентским и базовым приемопередатчиком и корректировку данного сигнала по фазе в момент передачи радиоимпульса. Т.е. в абонентском приемопередатчике происходит излучение квазикогерентного сигнала Mci(t), который можно считать синхронизированным по фазе и частоте с сигналом B0(t) только на протяжении короткого времени измерения. Такой вариант синхронизации системы связи является наиболее простым и легко реализуемым с помощью алгоритмов цифровой обработки сигналов (ЦОС).
На фигуре 2 представлен другой вариант реализации изобретения.
Система связи работает таким образом, что после принятия абонентским приемопередатчиком сигнала базовой станции B0(t) и расчета разности фаз Δθi абонентский передатчик, в свою очередь, передает в пакете гармонический сигнал M0(t) и информацию о Δθi. Базовая станция вычисляет значение Δϕ следующим образом: она принимает сигнал M0(t), сравнивает его с сигналом B0(t+γi), где  вычисляет разницу фаз Δϕ между колебаниями B0(t+γi) и M0(t), а затем переводит разницу фаз колебаний в расстояние и линейную координату подвижного приемопередатчика. Соответственно, для такого варианта реализации измеряется своя системная задержка ϕs, учитывающаяся при вычислении расстояния между базовой станцией и абонентским приемопередатчиком.
вычисляет разницу фаз Δϕ между колебаниями B0(t+γi) и M0(t), а затем переводит разницу фаз колебаний в расстояние и линейную координату подвижного приемопередатчика. Соответственно, для такого варианта реализации измеряется своя системная задержка ϕs, учитывающаяся при вычислении расстояния между базовой станцией и абонентским приемопередатчиком.
Если проводящая линия, по которой распространяется электромагнитный сигнал, однородна и можно пренебречь отраженными сигналами, то R(Δϕ) линейно зависит от Δϕ и определяется классической формулой 
 При значительных неоднородностях линии необходимо использовать эмпирическую зависимость R(Δϕ).
При значительных неоднородностях линии необходимо использовать эмпирическую зависимость R(Δϕ).
Для того, чтобы добиться синхронизации квазикогерентных измерительных сигналов базовой станции и абонентского приемопередатчика, период повторения измерительных сигналов базовой станции нужно выбрать меньше, чем обратная величина максимальной ошибки установки частоты приемопередатчиков. Так, если нестабильность частоты опорного генератора каждого приемопередатчика составляет 1×10-6, а частота f1=1 МГц, то период посылки измерительного сигнала базовой станцией должен быть для описываемого варианта алгоритма реализации способа позиционирования менее 0,5 секунды.
Для того, чтобы решить вопрос неоднозначности измерения расстояний при удалении от базовой станции на расстояние более половины длины волны электромагнитного колебания, в изобретении предлагается использовать один из трех технических вариантов реализации:
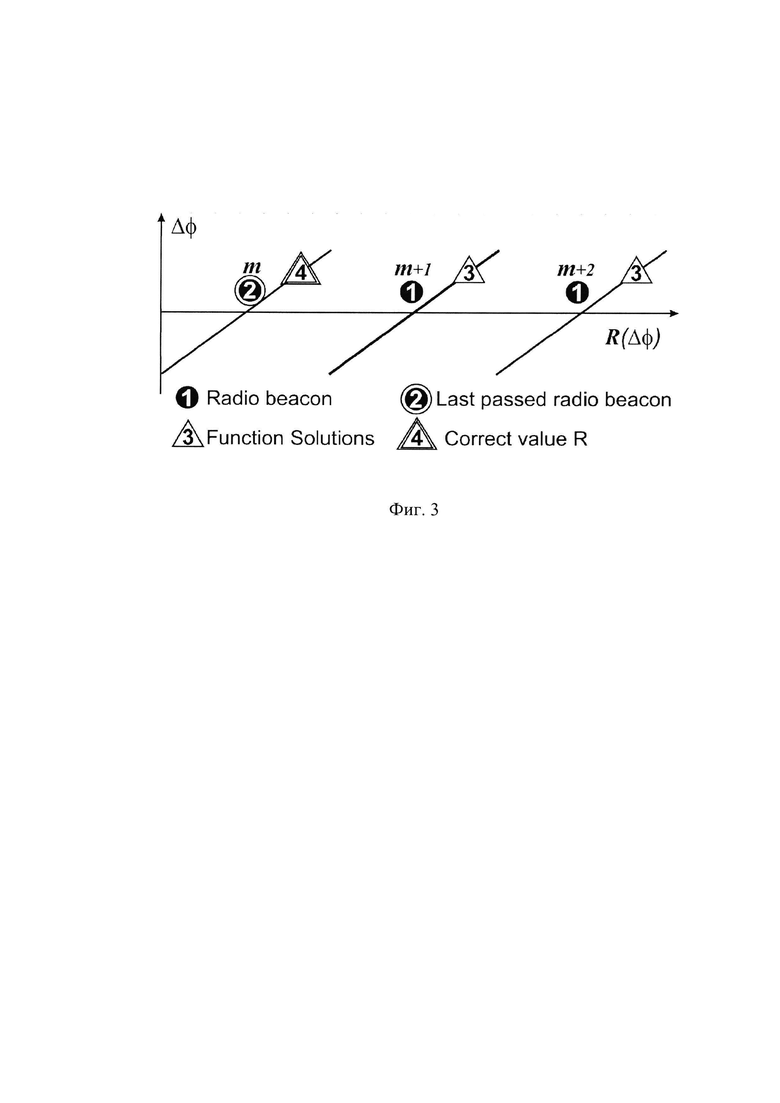
1. На фигуре 3 представлено использование дополнительных маломощных радиомаяков (поз. 1), которые устанавливаются в фиксированных местах горных выработок и которые передают свои координаты или персональный номер маяка. Зафиксировав проход через радиомаяк (поз. 1), подвижный приемопередатчик отправляет эту информацию базовой станции. Тогда из всех решений уравнения R(Δϕ, λ) (поз. 3) для фиксированного значения Δϕ будет выбираться значение координаты R (поз. 4) с учетом направления движения подвижного приемопередатчика и последнего пересеченного радиомаяка (поз. 2), контактировавшего с подвижным приемопередатчиком. Использование таких маломощных маяков необходимо для того, чтобы отметить места пересечений горных выработок, и тем самым однозначно решить вопрос о том, по какому направлению из нескольких расходящихся горных выработок движется подвижный приемопередатчик.
Т.е. дополнительно для исключения неоднозначности при определении расстояний между приемопередатчиками при удалении на расстояние более половины длины волны используемого гармонического радиосигнала используются маломощные радиомаяки, имеющие малый радиус действия, координаты которых известны, и передающие свой уникальный номер, или передающие свои точные координаты, а подвижные приемопередатчики оснащены системой считывания сигнала этих радиомаяков и передают на стационарный приемопередатчик информацию о последнем считанном радиомаяке для вычисления точной текущей координаты.
2. Использование, как минимум, дополнительного гармонического измерительного сигнала на частоте f2 с длиной волны λ2 таким образом, чтобы необходимая максимальная дальность от стационарного приемопередатчика, определяемая системой навигации, была меньше чем С/(2|f2-f1|), где С - скорость распространения электромагнитной волны. Для определения местоположения подвижного приемопередатчика выбирается ближайшая к стационарному приемопередатчику точка, удовлетворяющая решению системы двух уравнений с двумя гармоническими сигналами разной частоты R(Δϕ, λ1) и R(Δϕ, λ2). Излучение второго гармонического сигнала может происходить как последовательно за первым сигналом, так и параллельно если разница частот между ними такова, что эти два сигнала попадают в одну частотную полосу передачи и приема приемопередатчиков;
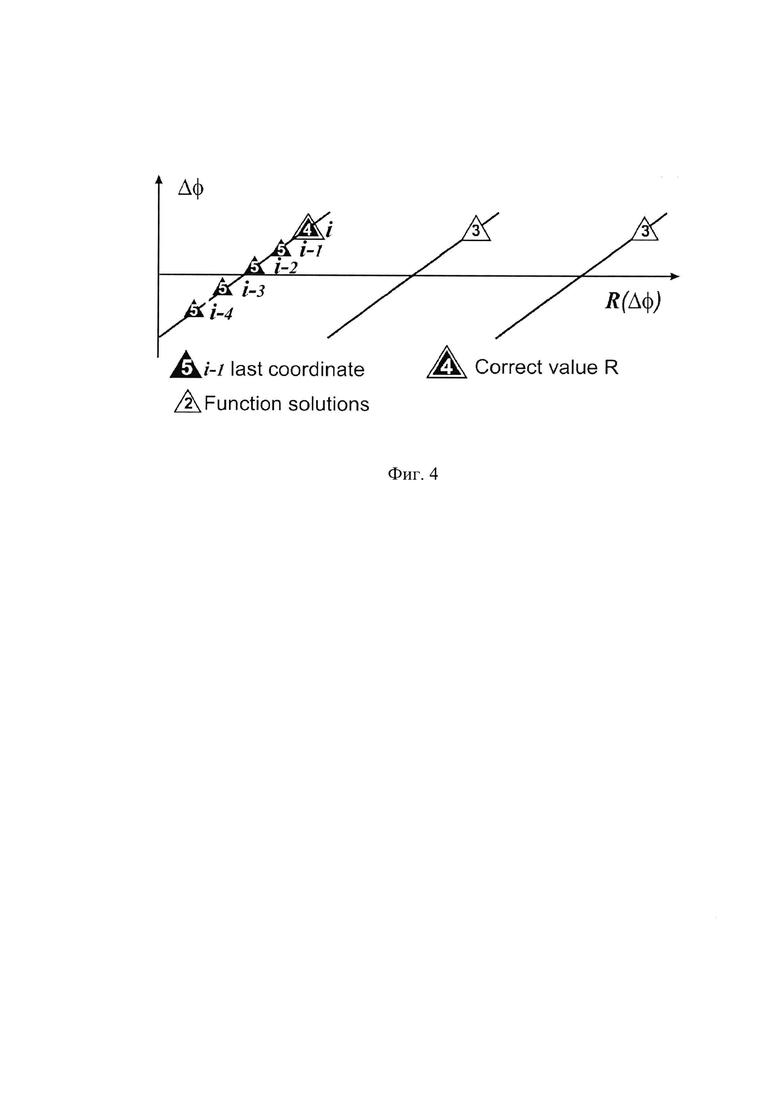
3. На фигуре 4 представлен вариант использования информации о предыдущем местонахождении подвижного приемопередатчика для определения текущего местонахождения. Из всех возможных текущих решений R(Δϕ, λ) (3) для Δϕ выбирается то, которое наиболее близко (поз. 4) к предыдущему (поз. 5) значению R. Т.е. априори считается, что за время между измерениями подвижный объект не сможет преодолеть расстояние более половины длины волны.
Т.е. дополнительно для исключения неоднозначности при определении расстояний между приемопередатчиками при удалении на расстояние более половины длины волны используемого гармонического радиосигнала в системе навигации сохраняется история предыдущих значений координаты подвижного приемопередатчика, и для исключения неоднозначности определения текущей координаты на расстояниях свыше половины длины волны излучаемого гармонического сигнала учитывается предыдущее значение координаты таким образом, что из всех возможных точек удовлетворяющих решению уравнения R(Δϕ, λ) нахождения координаты выбирается точка с координатами R наиболее близкими к предыдущей точке.
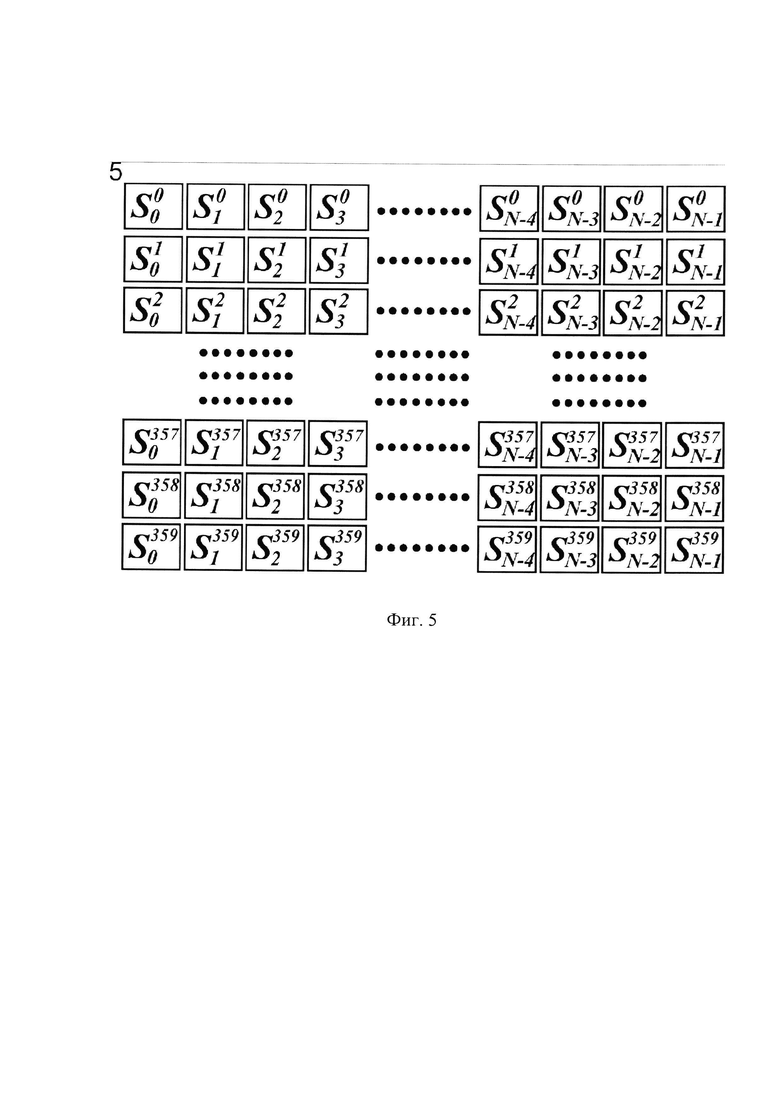
При использовании цифровых устройств микропроцессоров, АЦП, ЦАП в схемах приемопередатчиков очень часто формируют гармонические сигналы табличным способом и затем на основной частоте или на промежуточной частоте преобразуют цифровой код в аналоговое колебание с помощью ЦАП. На фигуре 5 показана схема реализации синхронизации абонентского приемопередатчика цифровым способом. В памяти приемопередатчика сформирован массив 5 (6) табличных значений сигнала промежуточной или основной частоты. По горизонтали расположены ячейки с массивами значений выборок колебания  где m - начальной фазе колебания в градусах, m=0, …, 359, k - разница фаз опорных колебаний приемопередатчиков в градусах, j=0, …, N-1, где N=360/Δϕдоп, Δϕдоп - допустимая ошибка определения фазы. В таблице на фигуре 5 эта разница составляет 1°. Для излучения электромагнитных колебаний на частоте 1 МГц погрешность определения координат в идеальных условиях при точности определения разности фаз опорных колебаний приемопередатчиков не более 1° не превысит 0,5 м. При использовании табличных значений выборок опорного колебания процедура синхронизации на абонентском передатчике осуществляется следующим образом. Тактовый генератор запускает цикл индекса к от 0 до N - 1 с последующим повторением, когда выбирается текущее значение
где m - начальной фазе колебания в градусах, m=0, …, 359, k - разница фаз опорных колебаний приемопередатчиков в градусах, j=0, …, N-1, где N=360/Δϕдоп, Δϕдоп - допустимая ошибка определения фазы. В таблице на фигуре 5 эта разница составляет 1°. Для излучения электромагнитных колебаний на частоте 1 МГц погрешность определения координат в идеальных условиях при точности определения разности фаз опорных колебаний приемопередатчиков не более 1° не превысит 0,5 м. При использовании табличных значений выборок опорного колебания процедура синхронизации на абонентском передатчике осуществляется следующим образом. Тактовый генератор запускает цикл индекса к от 0 до N - 1 с последующим повторением, когда выбирается текущее значение 
 это выборки опорного колебания абонентского приемопередатчика, соответствующие колебанию M0(t). После принятия опорного сигнала базовой станции в j раз и вычисления параметра γj вычисляется верхний индекс т для таблицы значений опорного сигнала. Для положительных и ненулевых значений функции
это выборки опорного колебания абонентского приемопередатчика, соответствующие колебанию M0(t). После принятия опорного сигнала базовой станции в j раз и вычисления параметра γj вычисляется верхний индекс т для таблицы значений опорного сигнала. Для положительных и ненулевых значений функции 
 индекс m будет равен
индекс m будет равен 
 а для отрицательных или нулевых значений
а для отрицательных или нулевых значений 
 индекс m будет равен
индекс m будет равен  где INT операция округления до целого числа.
где INT операция округления до целого числа.
Далее в качестве опорного квазикогерентного сигнала для излучения от абонентского приемопередатчика используются выборки значений  (фигура 5), что соответствует колебанию Mci(t).
(фигура 5), что соответствует колебанию Mci(t).
Таким образом, с помощью заявленного изобретения возможно получение информации об удалении абонентского подвижного приемопередатчика от стационарного базового приемопередатчика вдоль оси протяженного объекта. Поскольку в системе навигации априори известны места расположения базовых станций, то полученная информация об удалении абонентских приемопередатчиков позволяет переводить это удаление в фактическое расположение (координаты) подвижного объекта на карте шахты, рудника или другого протяженного объекта. А расположение дополнительных радиомаяков в местах расхождения горных выработок позволяет однозначно определять направление перемещения подвижных объектов.
Таким способом можно определять расстояния между подвижными приемопередатчиками, когда один из них выполняет вышеописанные процедуры измерения в качестве стационарного, а другой в качестве подвижного абонентского приемопередатчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА МОБИЛЬНОЙ СВЯЗИ ДЛЯ ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2017 |
|
RU2642845C1 |
| Коммуникационная система для подземных сооружений | 2017 |
|
RU2672273C1 |
| СПОСОБ СВЯЗИ | 2023 |
|
RU2833887C1 |
| РЕЗОНАНСНАЯ ПЕРЕСТРАИВАЕМАЯ АНТЕННА | 2018 |
|
RU2696882C1 |
| РЕГИОНАЛЬНАЯ СЕТЬ МОБИЛЬНОЙ СВЯЗИ И АБОНЕНТСКИЙ ТЕРМИНАЛ | 2007 |
|
RU2351074C2 |
| СПОСОБ ПЕРЕДАЧИ ДИСКРЕТНЫХ СООБЩЕНИЙ ПО КАНАЛАМ РАДИОСВЯЗИ | 2007 |
|
RU2377723C2 |
| РЕЗОНАНСНАЯ МНОГОДИАПАЗОННАЯ АНТЕННА | 2018 |
|
RU2689969C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2351489C1 |
| СПОСОБ ПОИСКА ПОСТРАДАВШИХ ПОД ЗАВАЛАМИ | 2016 |
|
RU2584978C1 |
| Способ навигации с использованием абонентского терминала и абонентский терминал | 2023 |
|
RU2837647C1 |

Использование: изобретение относится к радиотехнике, системам позиционирования и навигации (определения координат), а именно к системам радиосвязи, которые путем осуществления радиоизмерений передаваемых специальных радиосигналов от стационарного и подвижных приемопередатчиков осуществляют расчет местонахождения подвижных приемопередатчиков относительно стационарных. Сущность: в способе навигации в протяженных объектах типа горных выработок шахт и рудников, туннелей используется способ фазовой радиодальнометрии и система связи, когда определяется расстояние R от стационарного приемопередатчика до подвижного приемопередатчика путем радиоизмерения разности фаз Δϕ опорного передаваемого и принимаемого сигнала электромагнитного колебания, отличается тем, что в качестве среды распространения радиосигнала используются продольные проводники, проложенные в протяженном объекте, а стационарные и подвижные приемопередатчики возбуждают электромагнитную волну вдоль этих проводников, при этом стационарный и подвижный приемопередатчики работают на передачу и прием, попеременно излучая и принимая гармонический сигнал, при этом постоянно осуществляется синхронизация по частоте и фазе одного из приемопередатчиков с другим вне зависимости от передачи или приема сообщения. Технический результат: обеспечение получения информации об удалении абонентского подвижного приемопередатчика от стационарного базового приемопередатчика вдоль оси протяженного объекта и определение направления перемещения подвижных объектов в протяженных объектах, а именно горных выработках шахт и рудников, транспортных туннелях, подземных коллекторах и т.п. технологических объектах. 2 з.п. ф-лы, 5 ил.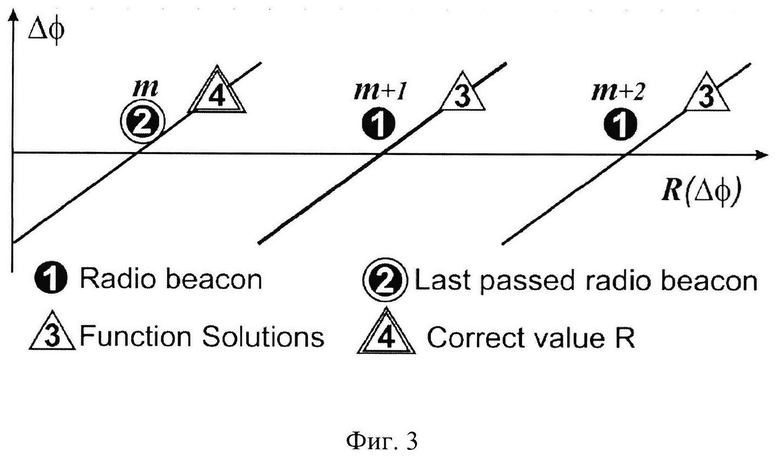
1. Способ навигации и измерения расстояний в протяженных объектах типа горных выработок шахт и рудников, туннелей, использующий способ фазовой радиодальнометрии и систему связи, когда определяется расстояние R от стационарного приемопередатчика до подвижного приемопередатчика путем радиоизмерения разности фаз Δϕ опорного передаваемого стационарным приемопередатчиком и принимаемого от подвижного приемопередатчика сигналов электромагнитного колебания, отличающийся тем, что в качестве среды распространения электромагнитного сигнала используются продольные проводники, проложенные в протяженном объекте, а стационарные и подвижные приемопередатчики возбуждают электромагнитную волну вдоль этих проводников, при этом стационарный и подвижный приемопередатчики работают на передачу и прием, попеременно излучая и принимая гармонический сигнал, при этом синхронизация по частоте и фазе одного из приемопередатчиков с другим осуществляется постоянно вне зависимости от передачи или приема сообщения, либо вместо синхронизации по частоте и фазе одного приемопередатчика с другим он передает вместе с гармоническим сигналом для радиоизмерения информацию о фазе принятого ранее радиоизмерительного гармонического сигнала, при этом во всех случаях передача и прием сигнала для радиоизмерения происходит в заранее определенные моменты абсолютного всемирного и/или системного точного времени, а период цикла времени Т обмена радиоизмерительными сигналами между стационарным и подвижным приемопередатчиком выбирается меньше времени перемещения подвижного приемопередатчика на половину длины волны измерительного радиосигнала.
2. Способ навигации и измерения расстояний в протяженных объектах типа горных выработок шахт и рудников, туннелей по п. 1, отличающийся тем, что дополнительно для исключения неоднозначности при определении расстояний между приемопередатчиками при удалении на расстояние более половины длины волны используемого гармонического радиосигнала используются маломощные радиомаяки, имеющие малый радиус действия, координаты которых известны, и передающие свой уникальный номер, или передающие свои точные координаты, а подвижные приемопередатчики оснащены системой считывания сигнала этих радиомаяков и передают на стационарный приемопередатчик информацию о последнем считанном радиомаяке для вычисления точной текущей координаты.
3. Способ навигации и измерения расстояний в протяженных объектах типа горных выработок шахт и рудников, туннелей по п. 1, отличающийся тем, что дополнительно для исключения неоднозначности при определении расстояний между приемопередатчиками при удалении на расстояние более половины длины волны используемого гармонического радиосигнала в системе навигации сохраняется история предыдущих значений координаты подвижного приемопередатчика, и для исключения неоднозначности определения текущей координаты на расстояниях свыше половины длины волны излучаемого гармонического сигнала учитывается предыдущее значение координаты таким образом, что из всех возможных точек, удовлетворяющих решению уравнения R(Δϕ, λ) нахождения координаты, выбирается точка с координатами R, наиболее близкими к предыдущей точке.
| СПОСОБ И СИСТЕМА МОБИЛЬНОЙ СВЯЗИ ДЛЯ ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2017 |
|
RU2642845C1 |
| Коммуникационная система для подземных сооружений | 2017 |
|
RU2672273C1 |
| US 2015051828 A1, 19.02.2015 | |||
| CN 113286360 A, 20.08.2021 | |||
| СПОСОБ ПЕРЕДАЧИ ДИСКРЕТНЫХ СООБЩЕНИЙ ПО КАНАЛАМ РАДИОСВЯЗИ | 2007 |
|
RU2377723C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ В ПОДЗЕМНЫХ ГОРНЫХ РАЗРАБОТКАХ | 2015 |
|
RU2584708C1 |
