Изобретение относится к системе определения местоположения в подземных горных разработках, содержащей блок управления, связываемый с машиной, по меньшей мере, два удаленных друг от друга, связанных с блоком управления приемных модуля и идентификационный модуль, носимый закрепленным за ним шахтером, причем блок управления выполнен с возможностью определения положения идентификационного модуля.
Системы определения местоположения, в принципе, известны и используются в подземных горных разработках, например, для определения числа находящихся в штреке лиц, чтобы соответственно осуществлять процессы очистки.
Известные системы определения местоположения в подземных горных разработках часто ограничены чисто функцией определения местоположения и поэтому не создают никакую дополнительную прибавочную стоимость.
Задачей изобретения является усовершенствование системы определения местоположения в подземных горных разработках таким образом, чтобы расширить объем ее функций и в то же время повысить безопасность при проведении подземных горных работ.
Эта задача решена посредством системы определения местоположения в подземных горных разработках, охарактеризованной признаками п. 1 формулы и, в частности, за счет того, что блок управления выполнен с возможностью запрашивания полномочий шахтера, носящего идентификационный модуль, и в зависимости от положения идентификационного модуля и полномочий шахтера - блокирования или разрешения осуществления функций машины.
Другими словами, идентификационный модуль используется для того, чтобы установить идентичность и местоположение определенного шахтера, причем шахтер может носить идентификационный модуль, например, на поясе или на каске. Таким образом, следует исходить из того, что положение идентификационного модуля соответствует положению шахтера. В зависимости от положения и полномочий шахтера блокируются или разрешаются осуществляться определенные функции машины, которой может быть, например, добычная машина. Например, очистной агрегат добычной машины может быть блокирован до тех пор, пока шахтер соответствующей квалификации находится для его обслуживания вблизи его пульта управления.
Таким образом, объем функций системы определения местоположения в подземных горных разработках расширяется за счет выполнения блока управления для разрешения осуществления и блокирования функций машины. Дополнительно безопасность в подземных горных разработках повышается за счет того, что управлять определенными функциями машины может только уполномоченный на это шахтер. Полномочия шахтера могут согласовываться, например, в зависимости от его профессионального уровня.
Машиной могут быть любые используемые в подземных горных разработках машины, например очистные агрегаты, в частности шнеки, транспортеры, секции механизированной крепи, щиты, автоматические добычные машины и т.п.
Блок управления может быть отдельным центральным модулем, который, например, посредством сигнального кабеля связан с приемными модулями. В качестве альтернативы блок управления может быть выполнен также распределенным за счет того, что его компоненты пространственно отделены и, в частности, расположены в различных, электрически соединенных корпусах. Предпочтительно приемные модули размещены неподвижно на щитах или в самой шахте.
Полномочия шахтера и положения идентификационного модуля, которые приводят к разрешению осуществления или блокированию определенных функций машины, могут храниться, например, в справочной таблице или базе данных блока управления. В качестве альтернативы блок управления может получить доступ к такой справочной таблице или базе данных, например, через сеть.
Предпочтительные варианты осуществления изобретения приведены в описании, на чертежах и в зависимых пунктах формулы.
Согласно первому предпочтительному варианту, блок управления выполнен с возможностью закрепления за шахтером управляющих команд машине и их записи с помощью положения идентификационного модуля. Таким образом, возникает протокол всех переданных шахтером или разными шахтерами указаний, в результате чего можно простым образом идентифицировать, например, неправильные указания и закрепить их за шахтером. Следовательно, соответствующий шахтер в случае неправильных указаний может быть целенаправленно обучен, в результате чего можно еще больше повысить безопасность. В частности, управляющие команды вместе со штампом времени и соответствующим положением шахтера можно записать, чтобы обеспечить последующее слежение.
Согласно другому предпочтительному варианту, блок управления выполнен с возможностью активирования и деактивирования парольной защиты функций машины в зависимости от положения идентификационного модуля и полномочий, шахтера, носящего идентификационный модуль. Следовательно, можно упростить рабочие процессы для уполномоченного соответствующим образом шахтера за счет того, что с помощью положения идентификационного модуля шахтера устанавливается, что он хотел бы обслуживать определенную машину. При наличии соответствующих полномочий шахтера парольная защита машины может быть автоматически деактивирована, благодаря чему шахтер, не теряя времени, может подавать машине управляющие команды.
Если же рядом с машиной находится не уполномоченный соответствующим образом шахтер, то управляющие команды могут подаваться только после ввода пароля, что, в свою очередь, повышает безопасность.
Согласно другому предпочтительному варианту, идентификационным модулем является инфракрасный излучатель или RFID (радиочастотный идентификационный) транспондер. В качестве альтернативы могут применяться также технологии NFC (коммуникация ближнего поля), ISM-диапазон (радиочастотный диапазон для промышленных, научных и медицинских целей), в частности на частоте 433 МГц, или WLAN (беспроводная сеть передачи данных). В зависимости от используемого идентификационного модуля приемные модули могут содержать в соответствии с этим фотодиод и/или антенну для приема сигналов идентификационного модуля.
Согласно другому предпочтительному варианту, идентификационный модуль выполнен с возможностью активной передачи идентификационного номера и/или сигнала времени. Для активной передачи идентификационный модуль может содержать, в частности, собственный аккумулятор энергии, например батарейку, благодаря чему можно повысить мощность передачи идентификационного модуля по сравнению с пассивной передачей. За счет этого можно увеличить возможное расстояние идентификационного модуля до приемного модуля и повысить точность определения положения идентификационного модуля. Например, определение положения идентификационного модуля может происходить с точностью до 30-50 см.
Переданный идентификационный номер служит, в частности, для однозначной идентификации идентификационного модуля и, тем самым, шахтера. Передача сигнала времени упрощает определение положения, поскольку блок управления должен лишь сравнивать разное время прохождения сигналов с одинаковым сигналом времени. Определение положения может осуществляться по принципу TDOA (разница во времени прихода), причем приемные модули синхронизированы по своему системному времени.
Согласно другому предпочтительному варианту, идентификационный модуль выполнен с возможностью активной передачи, в частности периодически, температуры и/или концентрации O2, CO2 и/или CO в штреке и/или пульса шахтера. Для этой цели идентификационный модуль может содержать соответственно выполненные датчики. За счет передачи параметров окружающей среды и пульса шахтера можно констатировать, например, недостаточную вентиляцию штрека или лавы или перегрузку шахтера.
Особенно предпочтительно система определения местоположения в подземных горных разработках содержит выключатель, в частности аварийный выключатель, внутри которого расположена антенна или расположен приемный модуль. В соответствии с соблюдаемыми в подземных горных разработках правилами безопасности используемые там приборы выполнены самозащищенными и заключены обычно в герметичный и/или прочный на сжатие кожух. Правда, это затрудняет расположение антенн и т.п. для приема сигналов идентификационного модуля. К тому же, например, выведенные из корпуса антенны влекут за собой значительные конструктивные затраты для соблюдения правил безопасности. Поэтому расположение антенны или приемного модуля в находящемся вне корпуса выключателе позволяет расположить антенну или приемный модуль простым и недорогим образом в зоне с хорошими условиями приема.
Согласно другому предпочтительному варианту, блок управления выполнен с возможностью определения двухмерного положения идентификационного модуля по известной геометрии машины. Для этого блок управления выполнен, в частности, с возможностью определения положения идентификационного модуля с помощью времени прохождения его сигнала, по меньшей мере, до двух приемных модулей. При этом следует исходить из ровного штрека, в результате чего могут возникнуть два возможных положения идентификационного модуля в плоскости. С помощью известной геометрии машины блок управления может исключить одно из обоих положений. При этом следует исходить из того, что шахтер может и не находиться в определенных положениях, например за стойками секции механизированной крепи. Таким образом, становится возможным двухмерное определение положения посредством двух приемных модулей.
В качестве альтернативы для определения положения идентификационного модуля могут использоваться также более двух приемных модулей. Кроме того, на машине могут быть размещены дополнительные идентификационные модули для определения ее положения в данный момент.
Согласно другому предпочтительному варианту, блок управления выполнен с возможностью связи с добычной установкой и с возможностью блокирования и/или разрешения движения секций механизированной крепи и/или активирования транспортера и/или активирования очистного агрегата в зависимости от положения идентификационного модуля. Также за счет этого повышается безопасность, в частности для шахтера, поскольку, например, щит может сделать один ход только в том случае, если шахтер не находится вблизи него. Также, например, транспортер не может быть включен, пока шахтер находится с забойной стороны транспортера или на самом транспортере. Кроме того, также не может быть включен шнек, если в опасной близости от него находится шахтер.
Согласно другому предпочтительному варианту, система определения местоположения в подземных горных разработках содержит систему связи, в частности телефонную сеть VoIP (протокол передачи голоса через Интернет), которая связана с блоком управления, причем блок управления выполнен с возможностью передачи вызовов для шахтера, носящего идентификационный модуль, в зависимости от положения идентификационного модуля на переговорные пункты и/или громкоговорители, находящиеся ближе всего к шахтеру. Это обеспечивает эффективное использование обычных в подземных горных разработках громкоговорящих установок для связи за счет того, что активируются только переговорные пункты вблизи соответственно вызванного шахтера. Другие переговорные пункты, в частности, не активируются, что не отвлекает других шахтеров. Система связи может использоваться для передачи данных, например, Ethernet- или световолноводные соединения.
Согласно другому предпочтительному варианту, система определения местоположения в подземных горных разработках содержит большое число идентификационных модулей, причем блок управления выполнен с возможностью определения и индикации положения идентификационных модулей и обеспечения выбора вызываемого шахтера. Таким образом, система связи может указывать на находящихся в определенной зоне или штреке шахтеров. С помощью такой индикации может быть осуществлен выбор одного или нескольких шахтеров, вызываемых системой связи. Следовательно, сообщения можно передавать целенаправленно в определенные зоны или штреки.
Согласно другому предпочтительному варианту, блок управления выполнен с возможностью передачи идентичности шахтера через систему связи при приеме вызова и/или инициировании вызова шахтером с помощью положения его идентификационного модуля. С помощью положения идентификационного модуля может быть, тем самым, обнаружен шахтер, который принимает и/или инициирует вызов, если идентификационный модуль засекается вблизи переговорного пункта. Таким образом, можно быстро и просто идентифицировать фактического абонента или вызывающего.
Изобретение относится также к способу определения местоположения шахтера под землей, при котором используется связанный с машиной блок управления, связанный, по меньшей мере, с двумя удаленными друг от друга приемными модулями. Кроме того, используется идентификационный модуль, носимый закрепленным за ним шахтером, причем блок управления определяет положение идентификационного модуля, запрашивает полномочие шахтера, носящего идентификационный модуль, и в зависимости от положения идентификационного модуля и полномочий шахтера блокирует или разрешает осуществлять функции машины.
Изобретение поясняется чертежами, на которых представлено следующее:
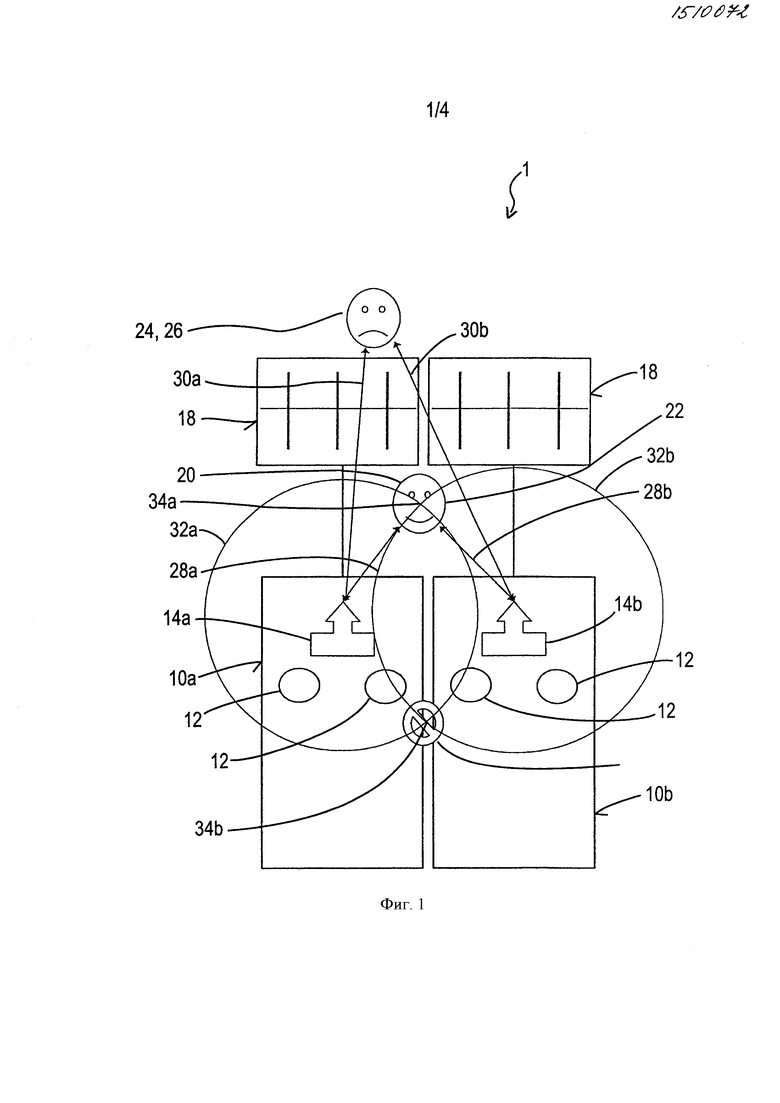
фиг. 1 - участок лавы с предложенным блоком управления;
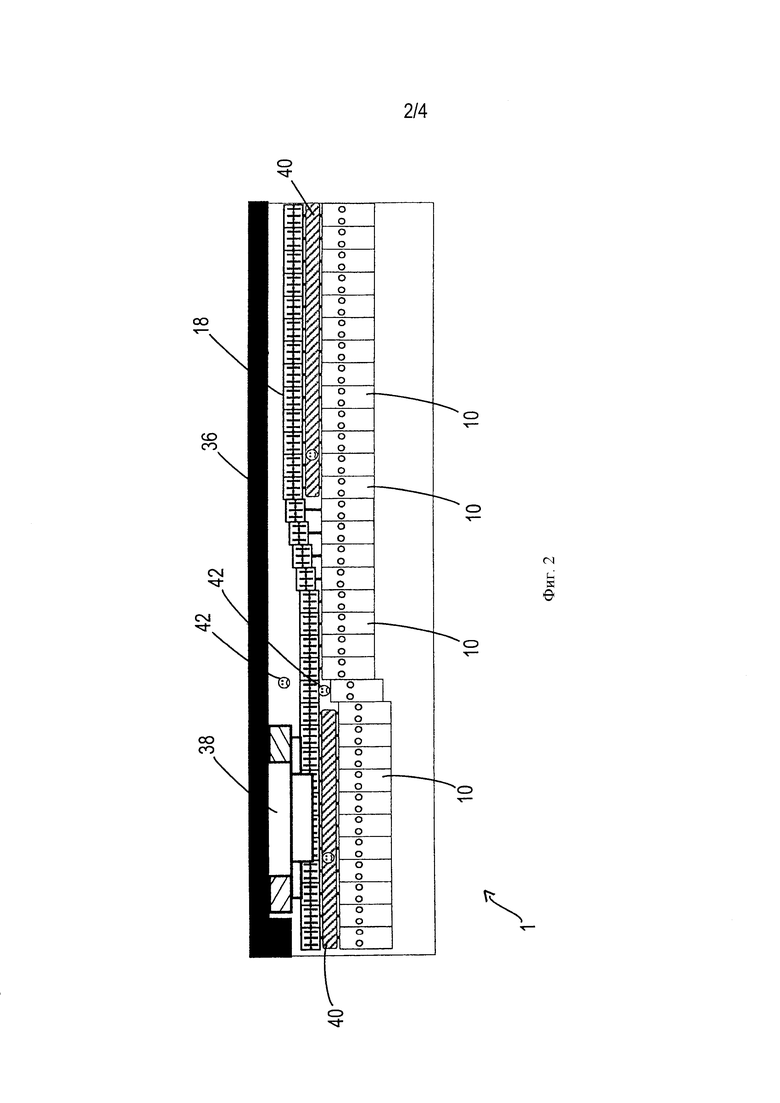
фиг. 2 - лава с добычной установкой;
фиг. 3 - вид сверху фрагмента предложенного блока управления;
фиг. 4 - блок управления из фиг. 3 в сечении.
На фиг. 1 изображен участок лавы 1, т.е. штрека, на котором расположены два щита 10а, 10b. Из щитов 10 схематично изображено соответственно только основание, на котором размещены по две гидравлические стойки 12.
На щите 10а закреплен прибор управления 14а, а на щите 10b - прибор управления 14b. Приборы управления 14 содержат по одному приемному модулю (не показан) и образуют сообща предложенный блок управления. Для этой цели приборы управления 10 связаны сигнальными кабелями (не показаны) и/или беспроводным соединением.
Со щитами 10 соединены секции транспортера 18. Между транспортером 18 и щитами 10 находится первый шахтер 20, носящий первый идентификационный модуль 22. На противоположной щитам 10 стороне транспортера 18 показан второй шахтер 24, носящий второй идентификационный модуль 26.
Оба идентификационных модуля 22, 26 выполнены в виде RFID-транспондера и носятся обоими шахтерами 20, 24, например, на поясе.
Каждый идентификационный модуль 22, 26 активно передает с равными интервалами автоматически собственный идентификационный номер и фактический штамп времени. Переданные сигналы принимаются приемными модулями приборов управления 14. Время прохождения или преодолеваемое расстояние радиосигналов обозначено для идентификационного модуля 22 стрелками 28а, 28b, а для идентификационного модуля 26 - стрелками 30а, 30b.
Если требуется определить, например, положение шахтера 20, т.е. положение идентификационного модуля 22, то каждый прибор управления 14 вычисляет по соответствующему времени прохождения 28а, 28b расстояние шахтера 20 от данного прибора управления 14. Вычисленное расстояние обозначено окружностями 32а, 32b соответственно для приборов управления 14а, 14b. Шахтер 20 должен находиться в одной из двух точек пересечения 34а, 34b окружностей 32а, 32b.
Геометрия расположения щитов 10 известна приборам управления 14, благодаря чему можно исключить пребывание шахтера 20 в точке пересечения 34b, поскольку здесь локальные условия препятствуют его пребыванию. Приборы управления 14 определяют, тем самым, точку пересечения 34а как положение или место пребывания шахтера 20. Соответствующим образом действуют для локализации шахтера 24.
На фиг. 2, в отличие от фиг. 1, изображена большая часть лавы, в которой угольный пласт 36 отрабатывается очистным агрегатом, например шнеком 38. Вынутый шнеком 38 уголь удаляется по транспортеру 18.
В лаве расположено большое число щитов 10, каждый из которых содержит прибор управления 14 (не показан). Шнек 38, транспортер 18 и щиты 10 являются частью автоматической добычной установки.
По мере выемки угольного пласта 36 транспортер 18 и щиты 10 передвигаются в направлении выемки. При этом возникают разрешенные зоны 40, обозначенные на фиг. 2 штриховкой и веселыми рожицами. В разрешенных зонах шахтер 20, 24 может находиться без опаски.
В частности, перед еще не передвинутыми секциями транспортера 18 и еще не полностью передвинутыми щитами 10 находятся запретные зоны 42, обозначенные грустными рожицами. В этих запретных зонах 42 существует опасность, например, зажатия при передвижке щита 10.
Если прибор управления 14 обнаруживает шахтера 20, 24 или идентификационный модуль 22, 26 в запретной зоне 42, то, например, работа шнека 38 и передвижка транспортера 18 или щита 10 прекращаются и возобновляются только тогда, когда шахтер 20, 24 находится в разрешенной зоне 40.
На фиг. 3 изображен вид сверху на прибор управления 14, содержащий панель управления 44, световой индикатор 46 и аварийный выключатель 48. В последнем предусмотрена антенна 50, подключенная коаксиальным кабелем 52.
Как показано на фиг. 4 в разрезе вдоль оси А-А из фиг. 3, коаксиальный кабель 52 проходит от антенны 50 к приемной электронной схеме 54. Антенна 50, коаксиальный кабель 52 и приемная электронная схема 54 образуют сообща приемный модуль.
Аварийный выключатель 48 герметично и в то же время подвижно соединен с корпусом 58 прибора управления 14 посредством гармошки 56. Корпус 58 выполнен полностью герметичным, а прибор управления 14 - самозащищенным.
Принятый антенной 50 сигнал идентификационного модуля 22, 26 передается по коаксиальному кабелю на приемную электронную схему 54, и время приема сигнала обрабатывается. Затем время приема сравнивается со временем приема в других приборах управления 14, причем связь осуществляется через присоединительные кабели 60 прибора управления 14. В заключение прибор управления 14 вычисляет положение идентификационного модуля 22, 26, и, при необходимости, деактивируются или выполняются функции добычной установки.


Изобретение относится к системе и способу определения местоположения в подземных горных разработках. Система содержит блок управления, соединенный с машиной, по меньшей мере, два удаленных друг от друга, связанных с блоком управления приемных модуля и идентификационный модуль, предназначенный для ношения шахтером. Причем блок управления выполнен с возможностью определения положения идентификационного модуля. Блок управления выполнен с возможностью запрашивания полномочий шахтера, носящего идентификационный модуль, и в зависимости от положения идентификационного модуля и полномочий шахтера - блокирования или разрешения осуществления функций машины. Способ определения местоположения шахтера под землей, при котором используют связанный с машиной блок управления, связанный, по меньшей мере, с двумя удаленными друг от друга приемными модулями, и идентификационный модуль, носимый шахтером. Причем с помощью блока управления определяют положение идентификационного модуля, запрашивают полномочие шахтера, носящего идентификационный модуль, и в зависимости от положения идентификационного модуля и полномочий шахтера блокируют или разрешают осуществление функций машины. 2 н. и 11 з.п. ф-лы, 4 ил.
1. Система определения местоположения в подземных горных разработках, содержащая блок управления (14, 14а, 14b), соединенный с машиной (10, 18, 38), по меньшей мере, два удаленных друг от друга, связанных с блоком управления (14, 14а, 14b) приемных модуля и идентификационный модуль (22, 26), предназначенный для ношения шахтером (20, 24), причем блок управления (14, 14а, 14b) выполнен с возможностью определения положения идентификационного модуля (22, 26), отличающаяся тем, что блок управления (14, 14а, 14b) выполнен с возможностью запрашивания полномочий шахтера (20, 24), носящего идентификационный модуль (22, 26), и в зависимости от положения (34а) идентификационного модуля (22, 26) и полномочий шахтера (20, 24) - блокирования или разрешения осуществления функций машины (10, 18, 38).
2. Система по п. 1, отличающаяся тем, что блок управления (14, 14а, 14b) выполнен с возможностью закрепления за шахтером (20, 22) управляющих команд машине (10, 18, 38) и их записи с помощью положения (34а) идентификационного модуля (22, 26).
3. Система по п. 1 или 2, отличающаяся тем, что блок управления (14, 14а, 14b) выполнен с возможностью активирования или деактивирования парольной защиты функций машины (10, 18, 38) в зависимости от положения идентификационного модуля (22, 26) и полномочий шахтера (20, 24), носящего идентификационный модуль (22, 26).
4. Система по п. 1, отличающаяся тем, что идентификационным модулем (22, 26) является инфракрасный излучатель или RFID-транспондер.
5. Система по п. 1, отличающаяся тем, что идентификационный модуль (22, 26) выполнен с возможностью активной передачи идентификационного номера и/или сигнала времени.
6. Система по п. 1, отличающаяся тем, что идентификационный модуль (22, 26) выполнен с возможностью активной передачи, в частности периодически, температуры и/или концентрации O2, CO2 и/или CO в штреке и/или пульса шахтера (20, 24).
7. Система по п. 1, отличающаяся тем, что она содержит выключатель, в частности аварийный выключатель (48), внутри которого расположена антенна (50) или расположен приемный модуль.
8. Система по п. 1, отличающаяся тем, что блок управления (14, 14а, 14b) выполнен с возможностью определения двухмерного положения (34а) идентификационного модуля (22, 26) по известной геометрии машины (10, 18, 38).
9. Система по п. 1, отличающаяся тем, что блок управления (14, 14а, 14b) выполнен с возможностью связи с добычной установкой и с возможностью блокирования и/или разрешения движения секций (10) механизированной крепи и/или активирования транспортера (18) и/или активирования очистного агрегата (38) в зависимости от положения (34а) идентификационного модуля (22, 26).
10. Система по п. 1, отличающаяся тем, что она содержит систему связи, в частности телефонную сеть VoIP, которая связана с блоком управления (14, 14а, 14b), причем блок управления (14, 14а, 14b) выполнен с возможностью передачи вызовов для шахтера (20, 24), носящего идентификационный модуль (22, 26), в зависимости от положения (34а) идентификационного модуля (22, 26) на переговорные пункты и/или громкоговорители, находящиеся ближе всего к шахтеру (20, 24).
11. Система по п. 10, отличающаяся тем, что она содержит множество идентификационных модулей (22, 26), причем блок управления (14, 14а, 14b) выполнен с возможностью определения и индикации положения (34а) идентификационных модулей (22, 26) и обеспечения выбора вызываемого шахтера (20, 24).
12. Система по п. 10 или 11, отличающаяся тем, что блок управления (14, 14а, 14b) выполнен с возможностью передачи идентичности шахтера (20, 24) через систему связи при приеме вызова и/или инициировании вызова шахтером (20, 24) с помощью положения (34а) его идентификационного модуля (22, 26).
13. Способ определения местоположения шахтера (20, 24) под землей, при котором используют связанный с машиной (10, 18, 38) блок управления (14, 14а, 14b), связанный, по меньшей мере, с двумя удаленными друг от друга приемными модулями, и идентификационный модуль (22, 26), носимый шахтером (20, 24), причем с помощью блока управления (14, 14а, 14b) определяют положение (34а) идентификационного модуля (22, 26), запрашивают полномочие шахтера (20, 24), носящего идентификационный модуль (22, 26), и в зависимости от положения (34а) идентификационного модуля (22, 26) и полномочий шахтера (20, 24) блокируют или разрешают осуществление функций машины (10, 18, 38).
| US 4722574 A1, 02.02.1988 | |||
| ШАХТНАЯ СИСТЕМА МОНИТОРИНГА, ОПОВЕЩЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ГОРНОРАБОЧИХ | 2009 |
|
RU2401947C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ И КОНТРОЛЯ ПРОИЗВОДСТВЕННЫХ ПРОЦЕССОВ, ОКРУЖАЮЩЕЙ СРЕДЫ И МЕСТОПОЛОЖЕНИЯ ГОРНОРАБОЧИХ В ПОДЗЕМНЫХ ВЫРАБОТКАХ | 2000 |
|
RU2180941C2 |
| US 20030137421 A1, 24.07.2003 | |||
| US 4495496 A1, 22.01.1985 | |||
| WO 2009118762 A1, 01.10.2009. | |||

