Область техники, к которой относится изобретение
Изобретение в целом относится к системам управления питанием космических аппаратов, а точнее к перестраиваемому блоку регулирования мощности для космического аппарата.
Уровень техники
Космические аппараты, такие как спутники, и иные аналогичного размера космические устройства с обтекателями обычно содержат реактивные двигатели малой тяги (РДМТ), выполненные с возможностью обеспечения изменения ориентации или маневрирования космического аппарата. Дополнительно к РДМТ космический аппарат должен содержать одну или более бортовых систем, которые требуют электропитания для своей работы. Энергетические требования к двигателю(-ям) малой тяги и к указанным бортовым системам существенно отличаются, и в существующих космических аппаратах используются отдельные блоки регулирования мощности, чтобы обеспечить питание для РДМТ и для бортовых систем.
Блоки регулирования мощности, необходимые для питания РДМТ имеют большой габарит и вес, и как правило не используются, когда РДМТ не приведены в действие. В результате в космическом аппарате большое конструктивное пространство и вес используются для того, чтобы обеспечивать ограниченные операции и давать минимум пользы вне указанных ограниченных операций.
Раскрытие изобретения
Согласно одному варианту осуществления изобретения, перестраиваемый блок регулирования мощности для космического аппарата содержит множество модулей питания, каждый из которых содержит первый источник питания и второй источник питания, причем первый источник питания и второй источник питания выполнены с возможностью последовательного соединения в первом состоянии и параллельного соединения во втором состоянии, а также множество контакторов, соединяющих каждый модуль питания по меньшей мере с одним другим модулем питания среди множества модулей питания, и с выходом блока регулирования мощности, и выполненных с возможностью управления состоянием модулей питания.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, указанное множество контакторов выполнено с возможностью соединения первого модуля из множества модулей питания последовательно со вторым модулем из множества модулей питания в первом состоянии.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, указанное множество контакторов выполнено с возможностью соединения каждого первого источника питания параллельно с каждым другим первым источником питания, и каждого второго источника питания параллельно с каждым другим вторым источником питания во втором состоянии.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, управление состоянием каждого контактора среди множества контакторов осуществляется посредством контролера.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, контроллер содержит записанные в память инструкции, предназначенные для перевода множества контакторов из первого состояния во второе состояние путем выключения блока регулирования мощности, смены состояния каждого контактора среди множества контакторов, и обратного включения блока регулирования мощности.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, каждый из контакторов среди множества контакторов представляет собой одно из следующих устройств: механическое реле, полупроводниковый ключ или электронную логическую схему.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, каждый из контакторов среди множества контакторов представляет собой механическое реле.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, вторым состоянием является состояние подачи низкого напряжения питания, при этом указанное множество контакторов настроено так, что контакторы нормально находятся в первом состоянии.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, первый источник питания в каждом модуле питания среди множества модулей питания представляет собой источник питания с параметрами 150 В, 11 А.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, второе состояние соответствует высоковольтному питанию с параметрами: 600 В, 22 А.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, первое состояние соответствует низковольтному питанию с параметрами: 150 В, 88 А.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, все модули питания среди множества модулей питания идентичны.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, множество модулей питания содержит по меньшей мере четыре модуля питания.
Согласно другому примеру раскрытого выше перестраиваемого блока регулирования мощности для космического аппарата, множество модулей питания содержит ровно четыре модуля питания.
Согласно варианту осуществления способа эксплуатации блока регулирования мощности, указанный способ содержит: подачу высоковольтного питания на коммутируемую силовую шину на период времени, определяемый первой нагрузкой; выключение блока регулирования мощности; перевод блока регулирования мощности из первого состояния высоковольтного питания во второе состояние низковольтного питания путем переключения состояния каждого контактора среди множества контакторов; включение блока регулирования мощности; и подачу низковольтного питания на коммутируемую силовую шину.
Согласно другому примеру раскрытого выше способа, первой нагрузкой является электроракетный двигатель малой тяги, а указанный период времени представляет собой продолжительность работы электроракетного двигателя малой тяги.
Согласно другому примеру раскрытого выше способа, подача низковольтного питания на коммутируемую силовую шину содержит подачу низковольтного питания по меньшей мере на одну бортовую электрическую систему космического аппарата через коммутируемую силовую шину.
Согласно одному варианту осуществления изобретения, система распределения питания космического аппарата содержит: блок регулирования мощности, выполненный с возможностью подачи высоковольтного питания на коммутируемую силовую шину в первом состоянии, и подачи низковольтного питания на коммутируемую силовую шину во втором состоянии; по меньшей мере один электроракетного двигатель малой тяги, соединенный с коммутируемой силовой шиной, и выполненный с возможностью получения питания в первом состоянии; по меньшей мере одну бортовую электрическую систему, соединенную с коммутируемой силовой шиной, и выполненную с возможностью получения питания во втором состоянии; и контроллер, выполненный с возможностью управления состоянием блока регулирования мощности.
Согласно другому примеру раскрытой выше системы распределения питания космического аппарата, блок регулирования мощности содержит: множество модулей питания, каждый из которых содержит первый источник питания и второй источник питания, причем первый источник питания и второй источник питания выполнены с возможностью последовательного соединения в первом состоянии и параллельного соединения во втором состоянии, и множество контакторов, соединяющих каждый модуль питания по меньшей мере с одним другим модулем питания среди множества модулей питания, и с выходом блока регулирования мощности, и выполненных с возможностью управления состоянием модулей питания.
Согласно другому примеру раскрытой выше системы распределения питания космического аппарата, все модули питания среди множества модулей питания идентичны.
Указанные и иные признаки настоящего изобретения можно будет лучше всего понять из последующего описания и прилагаемых чертежей, о которых будет кратко сказано в следующем разделе.
Краткое описание чертежей
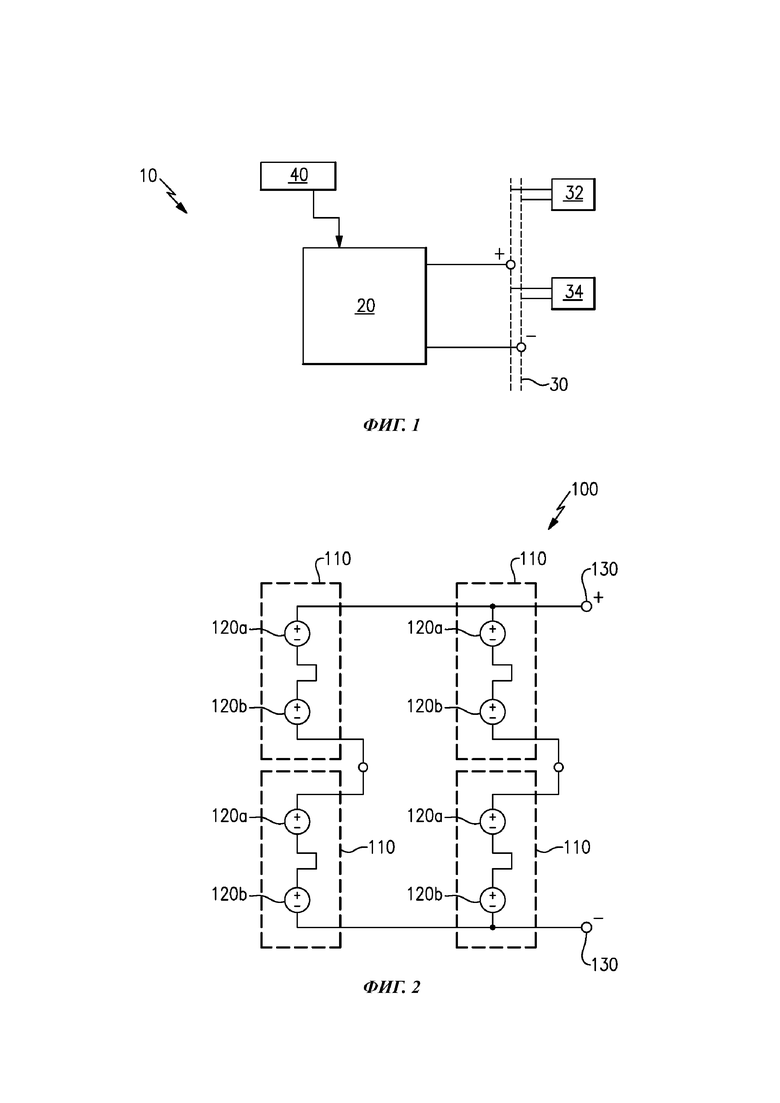
Фиг. 1 иллюстрирует часть системы питания космического аппарата, содержащей перестраиваемый блок регулирования мощности.
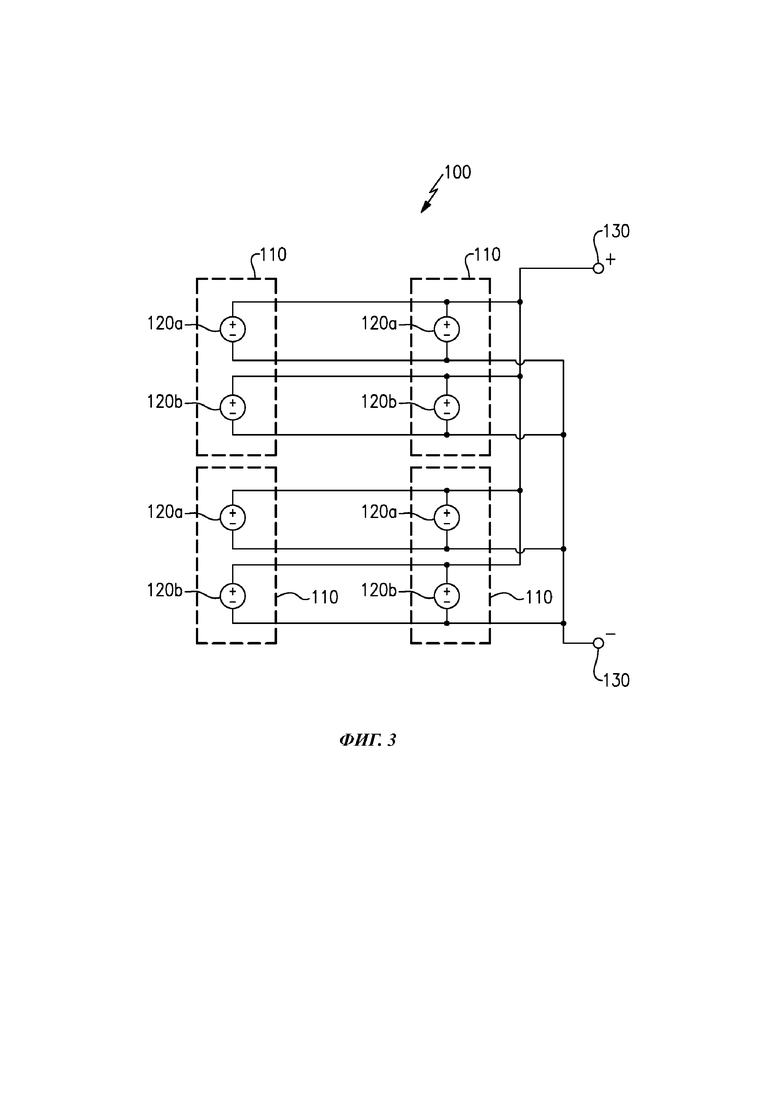
Фиг. 2 схематически изображает пример перестраиваемого блока регулирования мощности при высоковольтной конфигурации.
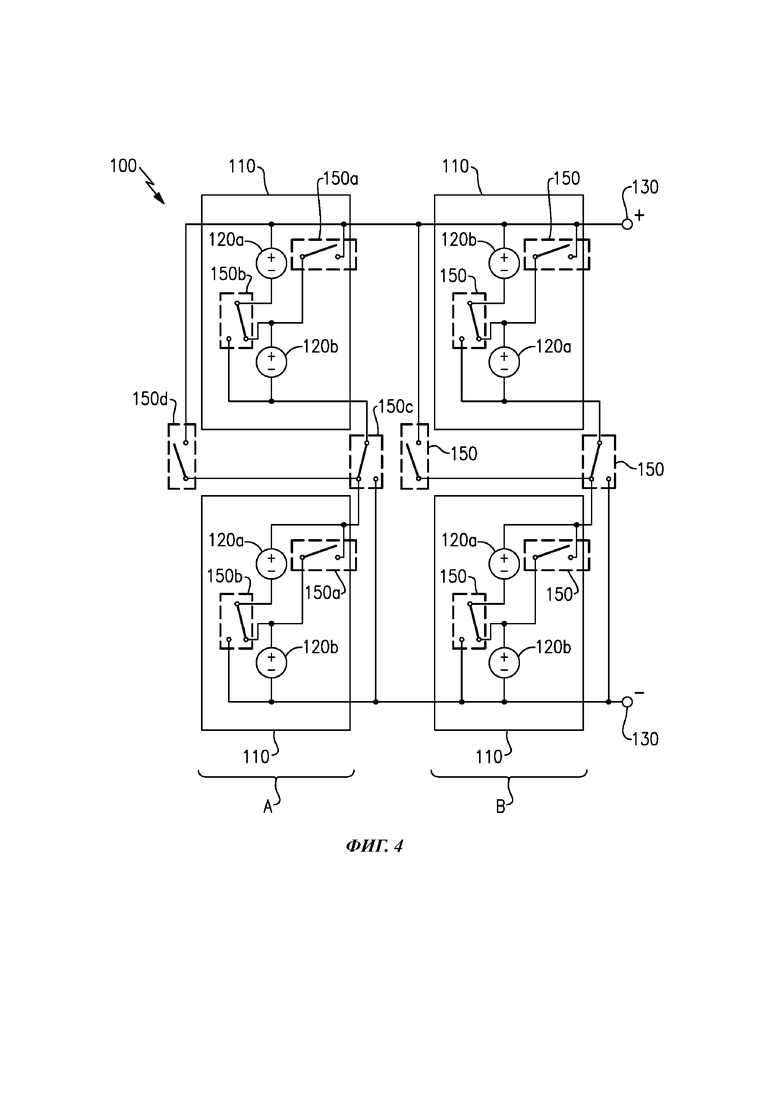
Фиг. 3 схематически изображает пример перестраиваемого блока регулирования мощности согласно фиг. 2 при низковольтной конфигурации
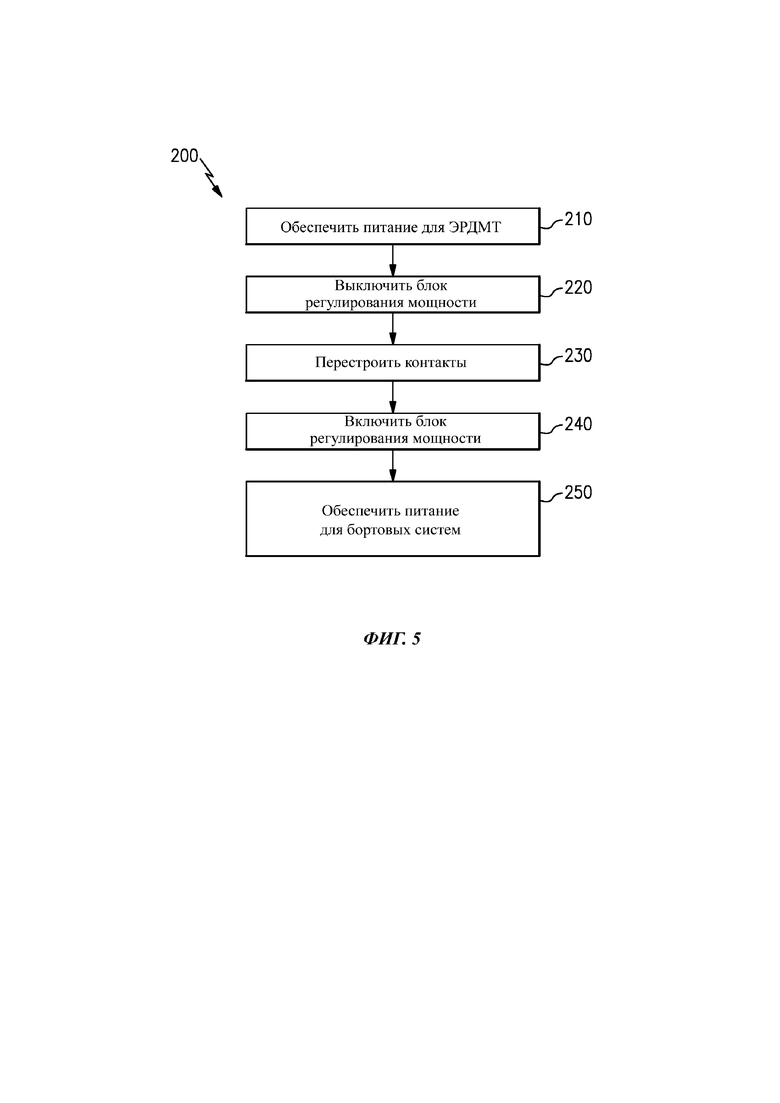
Фиг. 4 схематически изображает пример перестраиваемого блока регулирования мощности согласно фиг. 2 и фиг. 3, содержащего релейный контактор, предназначенный для изменения конфигурации блока регулирования мощности.
Фиг. 5 представляет блок-схему, демонстрирующую процесс перехода блока регулирования мощности от первой конфигурации ко второй конфигурации.
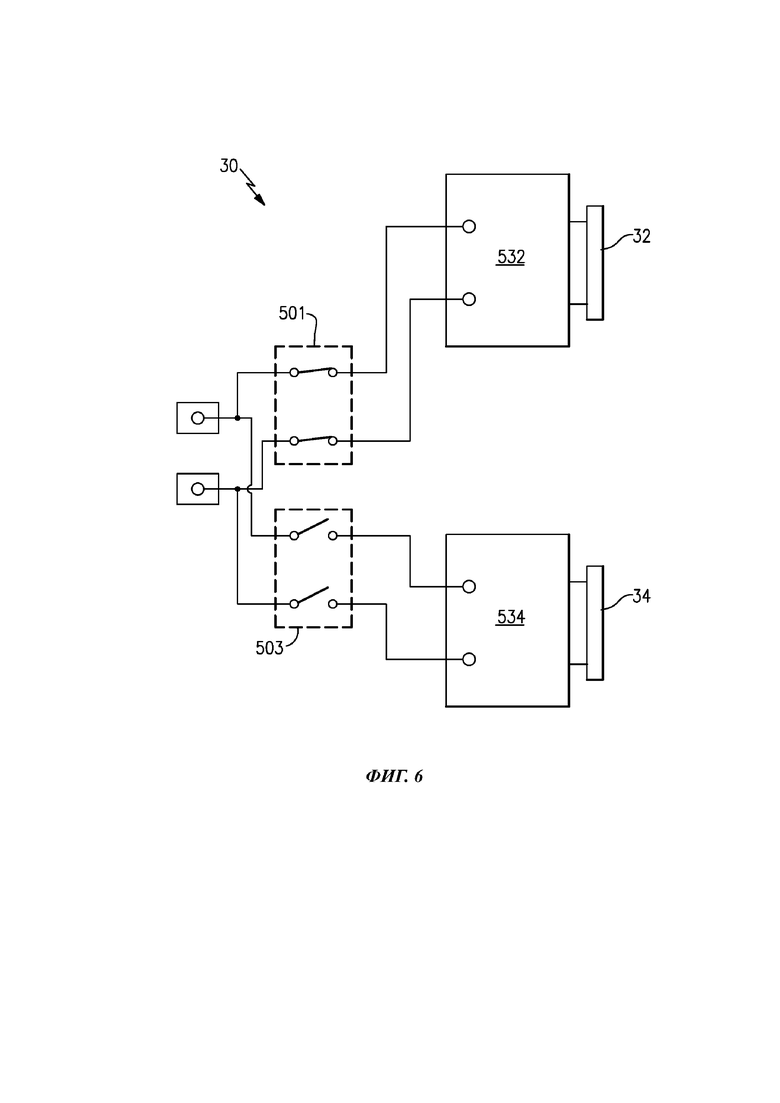
Фиг. 6 Иллюстрирует коммутируемую силовую шину в соответствии с примером построения системы.
Осуществление изобретения
Фиг. 1 схематически изображает систему 10 питания постоянного тока для использования в космическом аппарате или ином космическом устройстве с обтекателями. Система 10 питания содержит перестраиваемый блок 20 регулирования мощности, выполненный с возможностью подачи питания на коммутируемую силовую шину 30. С коммутируемой силовой шиной 30 соединено множество отдельных нагрузок 32, 34, включая один или более электроракетных двигателей малой тяги (ЭРДМТ) 32, и одну или более бортовых электрических систем 34. Управление состоянием перестраиваемого блока 20 регулирования мощности осуществляется посредством контроллера 40. Хотя на схеме изображена одна линия управления, соединяющая контроллер 40 с блоком 20 регулирования мощности, следует понимать, что может быть использовано любое число соответствующих линий управления, какое необходимо для осуществления вышеупомянутой перестройки блока 20.
Коммутируемая силовая шина 30 представляет собой передающую шину питания постоянного тока, которая выполнена с возможностью подключения к нагрузке 32, 34, которая обеспечивается питанием в любой данный момент времени. Коммутируемая силовая шина 30 может представлять собой любую силовую шину известного типа, способную коммутировать питание и выдерживать условия по напряжению и току для высоковольтной нагрузки и низковольтной нагрузки. Согласно фиг. 6, один вариант осуществления силовой коммутируемой шины 30 может содержать переключатели 501, 503, выполненные с возможностью подачи питания к одной из следующих шин: шине 532 ЭРДМТ или шине 534 бортовых электронных систем. Шина 532 ЭРДМТ подает питание к одному или более электроракетным двигателям 32 малой тяги, а шина бортовых электронных систем подает питание к одной или более бортовым электрическим системам 34.
Требуемые характеристики питания каждой из нагрузок 32, 34 отличаются друг от друга, при этом для ЭРДМТ 32 требуется высокое напряжение при низком потребляемом токе (например, 600 В при 22 А), а для бортовой электрической системы 34 требуется низкое напряжение (например, 75 В - 150 В) при более высоких токах нагрузки (например, 88 А).
В целях снижения веса и уменьшения места в космическом аппарате, которое требуется для размещения блока(-ов) 20 регулирования мощности, предусмотрен один единственный перестраиваемый блок 20 регулирования мощности, который способен при одной конфигурации обеспечивать питание ЭРДМТ 32 с высоким напряжением и низким током, а при другой конфигурации обеспечивать питание бортовых электрических систем 34 с низким напряжением и высоким током.
С учетом фиг. 1, на фиг. 2 схематически изображен пример перестраиваемого блока 100 регулирования мощности, конфигурация которого обеспечивает на выходе питание с высоким напряжением при низком токе. И аналогично с учетом фиг. 1, на фиг. 3 схематически изображен пример перестраиваемого блока 100 регулирования мощности, конфигурация которого обеспечивает на выходе питание с низким напряжением при высоком токе.
Соответствующий примеру блок 100 регулирования мощности содержит четыре модуля 110, каждый из которых содержит пару источников 120а, 120b питания. Согласно одному примеру, каждый из источников 120а, 120b питания на выходе обеспечивает 150 В, 11 А. Модули, использованные в примере, являются приблизительно идентичными. Выражение «приблизительно идентичные» относится к электрическим цепям, обладающим одинаковыми или приблизительно одинаковыми характеристиками с учетом различий компоновки и допусков изготовления.
Чтобы на коммутируемой шине 30 обеспечить 600 В, 22 А, источники 120а, 120b питания в каждом модуле 110 соединяют последовательно, так что отрицательный полюс первого источника 120а питания оказывается соединенным с положительным полюсом второго источника 120b питания. Модули 110 организованы в виде двух групп по два модуля 110, при этом модули 110 в данной группе также соединены последовательно. Группы соединены с выходными полюсами 130 по параллельной схеме. Конфигурация, обеспечивающая на выходе 600 В, 22 А, изображена на фиг. 2.
Когда ЭРДМТ 32 не требуется, блок 100 регулирования мощности переключают на вторую конфигурацию, изображенную на фиг. 3. Согласно одному примеру, вторая конфигурация обеспечивает на выходе 150 В, 88 А. Чтобы получить на выходе такие параметры, источники 120а, 120b питания каждого модуля 110 соединяют по параллельной схеме, при этом все источники 120а, 120b оказываются соединенными непосредственно с полюсами 130, и соединенными друг с другом параллельно.
Благодаря перестроению для работы в обеих указанных конфигурациях, блок 100 регулирования мощности может обеспечивать надлежащие уровни питания для ЭРДМТ 32, а также для бортовых электрических систем 34 в зависимости от конкретного режима работы космического аппарата. Это в свою очередь позволяет снизить вес космического аппарата, поскольку один блок 100 регулирования мощности может обеспечить функции, для которых ранее требовались два отдельных блока регулирования мощности.
С учетом фиг. 1-3 на фиг. 4 схематически изображен блок 100 регулирования мощности, содержащий переключатели 150, которые могут использоваться для изменения конфигурации блока. В изображенном блоке 100 регулирования мощности переключатели 150 обеспечивают конфигурацию с высоким выходным напряжением, соответствующую фиг. 2. Согласно одному примеру, каждый из переключателей 150 представляет собой механическое реле, выполненное с возможностью переключения либо из положения первого соединения в положение второго соединения, либо в положение размыкания цепи, когда от контроллера 40 поступает командный сигнал. Согласно другим примерам, могут быть использованы переключатели 150 иной природы, включая транзисторные схемы или иные электронные логические схемы. Каждый модуль 110 содержит два переключателя 150, выполненные с возможностью переключения источников 120а, 120b из последовательного соединения в параллельное соединение. Кроме того, каждый из модулей 110 соединен с полюсами 130 и с другим модулем 110 в соответствующей группе через пару переключателей 150, которые находятся снаружи модулей 110.
Согласно некоторым примерам, у переключателей 150 имеется исходное, нормальное положение, в котором переключатели находятся, когда не получают никакого управляющего сигнала. К примеру, указанное исходное положение может задавать блоку 100 регулирования мощности конфигурацию, которая обеспечивает низкое выходное напряжение (например, как на фиг. 3) при отсутствии управляющего сигнала, при этом положение переключателей 150 может изменяться при приеме управляющего сигнала.
Согласно другим примерам, переключатели 150 могут представлять собой запираемые контакторы, у которых нет исходного положения. К примеру, переключатели 150 сохраняют свое текущее состояние, пока не будет принят управляющий сигнал, и переходят в другое состояние при приеме управляющего сигнала. После переключения переключатели 150 сохраняют свое новое состояние, до тех пор, пока не будет принят другой управляющий сигнал, который снова вызовет их переключение.
Согласно схеме, изображенной на фиг. 4, каждая группа А, В модулей 110 одинакова, и построена следующим образом. Группа А, В включает в себя первый модуль 110, содержащий первый источник 120а питания, у которого имеется положительный полюс и отрицательный полюс. Положительный полюс первого источника 120а питания соединен либо с положительным полюсом второго источника 120b питания через первый контактор 150а и с положительным выходным полюсом 130+, либо только с положительным выходным полюсом 130+ в зависимости от состояния первого контактора 150а. Отрицательный полюс первого источника 120а питания соединен либо с положительным полюсом второго источника 120b питания, либо с отрицательным выходным полюсом 130-блока 100 регулирования мощности в зависимости от состояния второго контактора 150b, который находится внутри модуля 110, и состояния третьего контактора 150с.
Аналогично, второй модуль 110 в каждой группе А, В содержит первый источник 120а питания с положительным и отрицательным полюсами. Положительный полюс первого источника 120а питания соединен либо с отрицательным полюсом второго источника 120b питания первого модуля в группе А, В через контактор 150 с, либо соединен с положительным выходным полюсом 130+ блока 100 регулирования мощности посредством другого контактора 150, который находится снаружи модулей 110 группировки А, В. Отрицательный полюс первого источника 120а питания второго модуля 110 соединен либо с отрицательным выходным полюсом 130-блока 10 регулирования мощности, либо с отрицательным выходным полюсом 130- и с отрицательным полюсом второго источника 120b питания первого модуля 110 группы А, В в зависимости от состояния контактора 150 с.
С учетом фиг. 1-4, фиг. 5 иллюстрирует процесс перехода от высоковольтной конфигурации согласно фиг. 2 к низковольтной конфигурации согласно фиг. 3. Исходно блок 100 регулирования мощности имеет конфигурацию, соответствующую фиг. 2, и на этапе 210 «Обеспечить питание для ЭРДМТ» обеспечивает питание для ЭРДМТ 32. Когда изменение положения космического аппарата закончено, или по иным причинам больше не требуется включать ЭРДМТ 32, контроллер определяет, что для ЭРДМТ 32 энергия больше не требуется, и на этапе 220 «Выключить блок регулирования мощности» выключает блок 100 регулирования мощности.
Пока блок 100 регулирования мощности выключен, контроллер 40 на этапе 230 «Перестроить контакты» вынуждает каждый из переключателей 150 перейти в противоположное состояние. Как только конфигурация всех переключателей 150 будет перестроена, контроллер 40 на этапе 240 «Включить блок регулирования мощности» возвращает блок 100 регулирования мощности к исходному режиму, и подает питание на шину 30. Шина 30, в свою очередь на этапе 250 «Обеспечить питание для бортовых систем» обеспечивает питание для присоединенных бортовых электрических систем 34.
Когда питание снова потребуется для ЭРДМТ 32, процесс 200 будет выполнен в обратном порядке, чтобы вернуться к исходным состояниям контакторов. В любом случае перестроение конфигурации контакторов осуществляется в то время, когда блок 100 регулирования мощности выключен, чтобы исключить подачу питания на шину 30, вызванную любыми случайными состояниями элементов.
Хотя выше был иллюстрирован и описан перестраиваемый блок регулирования мощности, содержащий ровно четыре модуля 110, перестраиваемая система может быть расширена, и специалист может включить в нее дополнительные пары модулей в зависимости от требуемых характеристик питания данной системы.
В примерах согласно фиг. 1-6 контролер 40 представляет собой адаптируемый цифровой контроллер, содержащий алгоритм управления, который обеспечивает специфичные характеристики управления каждого режима работы. Согласно другим примерам, схема управления может быть реализована путем применения сложного аналогового управляющего устройства.
Следует также понимать, что любой из рассмотренных выше принципов может быть использован сам по себе или в комбинации с любыми или всеми описанными выше принципами. Хотя выше был раскрыт вариант осуществления изобретения, рядовому специалисту в данной области должно быть понятно, что в рамках идеи и объема настоящего изобретения в него могут быть внесены определенные изменения. По этой причине прилагаемая формула изобретения должна быть изучена, чтобы определить истинный объем и содержание настоящего изобретения.
Изобретение относится к области электротехники, в частности к перестраиваемым блокам регулирования мощности для космического аппарата. Технический результат заключается в обеспечении двух разных типов питания на борту космического аппарата. Достигается тем, что каждый из модулей питания содержит первый источник питания и второй источник питания, при этом первый источник питания и второй источник питания выполнены с возможностью последовательного соединения в первом состоянии и параллельного соединения во втором состоянии. Множество контакторов соединяют каждый модуль питания по меньшей мере с одним другим модулем питания среди множества модулей питания и с выходом блока регулирования мощности и выполнены с возможностью управления состоянием модулей питания. 12 з.п. ф-лы, 6 ил.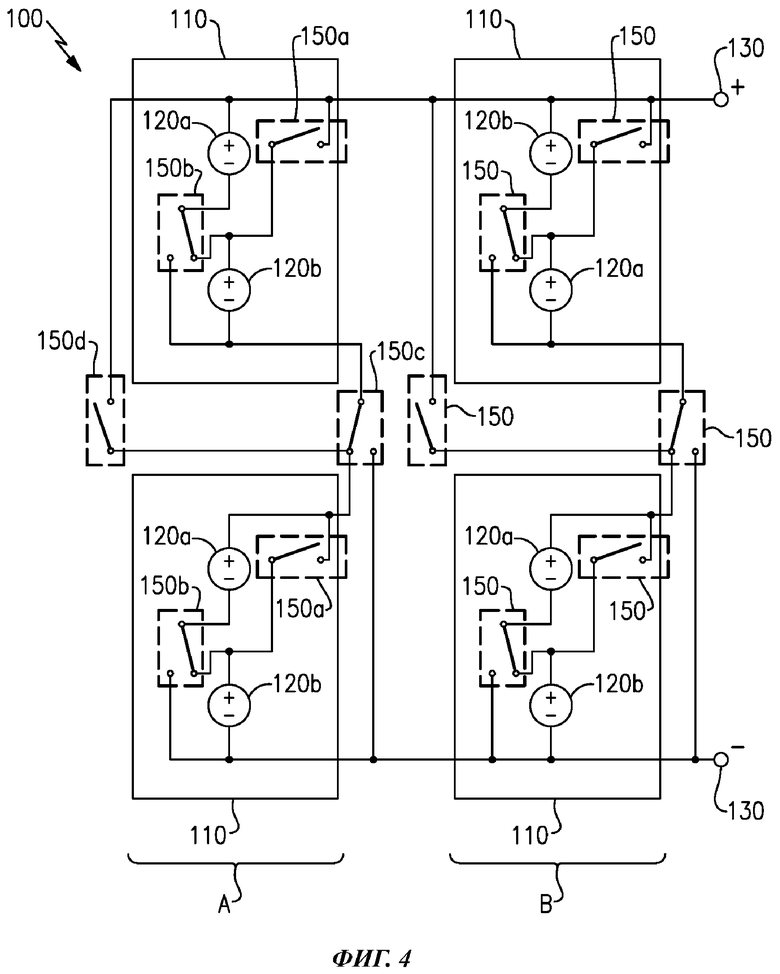
1. Космический аппарат, содержащий:
по меньшей мере один электроракетный двигатель малой тяги, требующий высокое напряжение при низком токе;
по меньшей мере одну бортовую электрическую систему, требующую низкое напряжение;
передающую шину питания, которая выполнена с возможностью переключения на подачу питания к указанному по меньшей мере одному электроракетному двигателю малой тяги и на подачу питания к указанной по меньшей мере одной бортовой электрической системе;
контроллер;
перестраиваемый блок регулирования мощности, содержащий множество модулей питания, каждый из которых содержит первый источник питания и второй источник питания, причем первый источник питания и второй источник питания каждого модуля питания выполнены с возможностью последовательного соединения в первом состоянии и параллельного соединения во втором состоянии,
и множество контакторов, соединяющих каждый модуль питания по меньшей мере с одним другим модулем питания среди множества модулей питания и с выходом блока регулирования мощности и выполненных с возможностью управления состоянием модулей питания, причем контроллер выполнен с возможностью управления контакторами для последовательного соединения по меньшей мере двух модулей питания, в первом состоянии, с тем, чтобы обеспечивать питание высокого напряжения и низкого тока для указанного по меньшей мере одного электроракетного двигателя малой тяги, а также контроллер выполнен с возможностью управления контакторами для параллельного соединения модулей питания, во втором состоянии, с тем, чтобы обеспечивать питание низкого напряжения для указанной по меньшей мере одной бортовой электрической системы.
2. Космический аппарат по п. 1, отличающийся тем, что контроллер выполнен с возможностью управления указанным множеством контакторов для соединения каждого первого источника питания параллельно с каждым другим первым источником питания и каждого второго источника питания параллельно с каждым другим вторым источником питания во втором состоянии.
3. Космический аппарат по п. 1, отличающийся тем, что контроллер содержит записанные в память инструкции, предназначенные для перевода множества контакторов из первого состояния во второе состояние путем выключения блока регулирования мощности, смены состояния каждого контактора среди множества контакторов и обратного включения блока регулирования мощности.
4. Космический аппарат по п. 1, отличающийся тем, что каждый из контакторов среди множества контакторов представляет собой одно из следующих устройств: механическое реле, полупроводниковый ключ или электронную логическую схему.
5. Космический аппарат по п. 4, отличающийся тем, что каждый из контакторов среди множества контакторов представляет собой механическое реле.
6. Космический аппарат по п. 1, отличающийся тем, что указанное множество контакторов настроено так, что контакторы нормально находятся в первом состоянии.
7. Космический аппарат по п. 1, отличающийся тем, что первый источник питания в каждом модуле питания среди множества модулей питания представляет собой источник питания с параметрами 150 В, 11 А.
8. Космический аппарат по п. 7, отличающийся тем, что перестраиваемый блок регулирования мощности обеспечивает, в первом состоянии, высоковольтное питание с параметрами 600 В, 22 А.
9. Космический аппарат по п. 7, отличающийся тем, что перестраиваемый блок регулирования мощности обеспечивает, во втором состоянии, низковольтное питание с параметрами 150 В, 88 А.
10. Космический аппарат по п. 1, отличающийся тем, что все модули питания среди множества модулей питания идентичны.
11. Космический аппарат по п. 1, отличающийся тем, что множество модулей питания содержит по меньшей мере четыре модуля питания,
при этом:
в первом состоянии два модуля питания последовательно соединены в одной группе из двух групп,
в первом состоянии два других модуля питания последовательно соединены в другой группе из двух групп,
и в первом состоянии две указанные группы последовательно соединены.
12. Космический аппарат по п. 11, отличающийся тем, что множество модулей питания содержит ровно четыре модуля питания.
13. Космический аппарат по п. 1, отличающийся тем, что передающая шина питания представляет собой передающую шину питания постоянного тока.
| US 6060790 A, 09.05.2000 | |||
| US 2019103750 A1, 04.04.2019 | |||
| US 2002100841 A1, 01.08.2002 | |||
| СПОСОБ УПРАВЛЕНИЯ ЭНЕРГООБЕСПЕЧЕНИЕМ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2411163C1 |
| СОЛНЕЧНАЯ БАТАРЕЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2619158C2 |
