Область техники
Данное изобретение относится к технической области автономного испытания, конкретно касается устройства и способ автономного испытания регулятора скорости (РС).
Уровень техники
Дизельная установка (ДУ) является аварийным резервным источником питания шины безопасного и надежного электроснабжения АЭС, регулятор скорости, как основная часть ДУ, используется для осуществления пуска и останова ДУ, регулирования мощности и скорости вращения.
В настоящее время, в связи с тем, что в автономном/оффлайновом режиме невозможно контролировать рабочие характеристики РС, поэтому, как только РС выйдет из строя, возникнет ситуация с невозможностью запуска ДУ для испытания, время для анализа причины неисправности или замены РС обслуживающим персоналом на месте будет относительно длинным, что уменьшает продолжительность работоспособного состояния ДУ так, что влияет на безопасную и стабильную эксплуатацию энергоблока АЭС.
Известна система оптимизации производительности регулировки электронного регулятора, которая характеризуется тем, что она включает в себя:
логический модуль проверки количества, подключенный к электронному регулятору;
модуль аналоговой проверки, подключенный к электронному регулятору;
имитационную платформу, подключенную к электронному регулятору и используемую для имитации работы дизельного генератора;
исполнительный механизм, подключенный между электронным регулятором и платформой моделирования;
верхний компьютер подключен к модулю логической проверки количества, модулю аналоговой проверки количества, электронному регулятору и платформе моделирования и имитации и используется для отправки команд управления электронному регулятору после установки режима работы электронного регулятора и настройки условий работы электронного регулятора при моделировании и платформы моделирования, и собирают тестовые временные сигналы от модуля проверки логического количества и модуля проверки аналогового количества, и получают выходной ответный сигнал от платформы моделирования и имитации, и сравнивают тестовый временной сигнал с заданным временным сигналом, и в соответствии с выходным ответным сигналом решают параметры PID в режиме онлайн, и отправляют инструкции по настройке параметров электронному регулятору, чтобы оптимизировать работу электронного регулятора (CN 112596374 A, 02.04.2021).
Недостатком указанного технического решения является недостаточная безопасность и надежность системы.
Поэтому необходимо срочно разработать автономное устройство испытания РС, способное устранить вышеуказанные недостатки в существующей технологии.
Раскрытие изобретения
Техническая проблема, на решение которой направлено заявленное изобретения, заключается в предоставлении устройства и метода автономного испытания РС, способного имитировать рабочее состояние и команды на месте, проводить автономное испытание РС.
Техническим результатом заявленного изобретения является снижение вероятности возникновения неисправности РС при работе ДУ в режиме онлайн, уменьшение времени неработоспособного состояния ДУ, тем самым обеспечивая безопасную и надежную работу системы ДУ и АЭС.
Техническое решение для реализации данного изобретения: устройство автономного испытания РС, которое в себя включает:
Блок промышленного компьютера, блок высокоскоростного сбора и контроллера, блок кнопок и индикаторов и блок соединительных кабелей. Блок соединительных кабелей соединяется с РС для осуществления функции передачи различных испытательных сигналов, управляющих сигналов между устройством автономного испытания и РС; Блок соединительных кабелей соединяется с блоком высокоскоростного сбора и контроллера для осуществления функции сбора различных испытательных сигналов и вывода управляющих сигналов; Блок промышленного компьютера соединяется с блоком высокоскоростного сбора и контроллера для осуществления вывода испытательных сигналов РС в РС и сбора сигналов обратной связи от РС, и показывает их на видеокадрах конфигурации, автоматически выполняет функцию автономного испытания РС с помощью испытательной программы для многих режимов внутри промышленного компьютера; Блок кнопок и индикаторов соединяется с блоком промышленного компьютера и с блоком высокоскоростного сбора и контроллера соответственно, с помощью кнопок на блоке кнопок и индикаторов осуществляется функция ручного вывода испытательных сигналов в блок промышленного компьютера и блок высокоскоростного сбора и контроллера, с помощью индикаторов на блоке кнопок и индикаторов осуществляется функция отображения испытательных сигналов.
Блок промышленного компьютера включает в себя модуль дисплея, модуль системной платы промышленного компьютера, модуль рабочего электропитания промышленного компьютера, модуль памяти, модуль питания блока высокоскоростного сбора и контроллера, модуль видеокадров конфигурации и модуль испытательной программы. Входной конец модуля рабочего электропитания промышленного компьютера подключен к внешнему источнику питания 220 В, а выходной конец соответственно подключен к входному концу модуля дисплея, модуля системной платы промышленного компьютера и модуля питания блока высокоскоростного сбора и контроллера. Модуль видеокадров конфигурации и модуль испытательной программы установлены в модуле системной платы промышленного компьютера, и выходной конец модуля системной платы промышленного компьютера соединяется с входным концом модуля дисплея; Выходной конец модуля системной платы промышленного компьютера соединяется с входом модуля памяти.
Блок высокоскоростного сбора и контроллера включает в себя модуль главной платы управления, модуль интерфейсной платы I/O, входной конец модуля главной платы управления соединяется с выходным концом модуля интерфейсной платы I/O, выходной конец модуля главной платы управления соединяется с модулем системной платы промышленного компьютера блока промышленного компьютера, входной конец модуля интерфейсной платы I/O соединяется с выходным концом РС, входной конец модуля интерфейсной платы I/O, входной конец модуля главной платы управления также соединяются с модулем питания блока высокоскоростного сбора и контроллера для блока промышленного компьютера.
Блок кнопок и индикаторов включает в себя модуль ввода-вывода РС, модуль испытательной кнопки и модуль управления питанием, выходной конец модуля ввода-вывода РС соединяется с модулем интерфейсной платы I/O. При переключении ручной/автоматической кнопки на ручную, можно прямо с помощью кнопки ввода-вывода выдать сигнальную команду регулятору скорости, выполнить функцию ручного испытания, одновременно показать состояние сигнала РС с помощью индикаторной лампы на кнопке ввода-вывода; Выходной конец модуля испытательной кнопки соединен с входным концом модуля главной платы управления, можно управлять запуском и остановкой испытательной программы в модуле испытательной программы с помощью кнопки, и показать результаты испытания РС с помощью индикаторной лампы на кнопке; Модуль управления питанием соединен с модулем рабочего питания промышленного компьютера и модулем питания блока высокоскоростного сбора данных и контроллера, и управляет выходом питания модуля рабочего питания промышленного компьютера и модуля питания блока высокоскоростного сбора и контроллера непосредственно с помощью кнопок.
Блок соединительных кабелей включает в себя модуль соединительных кабелей, а два конца модуля соединительных кабелей соединены соответственно с РС и модулем интерфейсной платы I/O; Модуль интерфейсной платы I/O передает сигнал, имитирующий процесс пуска ДУ, и заданный сигнал частоты вращения регулятору скорости через модуль соединительных кабелей; РС выдает сигнал обратной связи остепени открытия дросселя модулю интерфейсной платы I/O через модуль соединительных кабелей.
Метод автономного испытания РС включает следующие шаги:
Шаг 1: имитировать сигнал процесса запуска ДУ;
Шаг 2: вывести соответствующий заданный сигнал частоты вращения в соответствии с выбранными режимами испытания;
Шаг 3: РС начинает работать после получения сигнала запуска, и выводит сигнал обратной связи о степени открытия дросселя в реальном времени по полученному сигналу частоты вращения;
Шаг 4: сравнить кривую обратной связи о степени открытия дросселя со стандартной кривой степени открытия дросселя, чтобы убедиться, что РС работает нормально или нет;
Шаг 5: индикатор показывает, что функция РС нормальная или ненормальная;
Шаг 6: сохранить кривую сигнала обратной связи о степени открытия дросселя.
Указанный шаг 1 конкретно в следующем:
Шаг 1.1: после нажатия копки модуля управления питанием модуль рабочего питания промышленного компьютера включается, а модуль рабочего питания промышленного компьютера выдает переменный ток 220 В, который подается на модуль дисплея и модуль системной платы промышленного компьютера для обеспечения их электропитанием 220 В, а также подаётся на модуль питания блока высокоскоростного сбора и контроллера;
Шаг 1.2: после нажатия кнопки модуля управления питанием модуль питания блока высокоскоростного сбора и контроллера включается, а модуль питания высокоскоростного сбора данных и контроллера выводит постоянный ток 24В, который подается на модуль интерфейсной платы I/O и модуль главной платы управления для обеспечения их питанием 24В.
Указанный шаг 2 конкретно в следующем: выбирать режим испытания через модуль изображения конфигурации, выдавать команду запуска модулю испытательной программы, после получения команды запуска модуль испытательной программы запускает работу алгоритма испытательной программы в данном режиме, и выводит сигнал, имитирующий процесс запуска ДУ, и заданный сигнал частоты вращения модулю главной платы управления; Или вручную вывести сигнал, имитирующий процесс пуска ДУ, и сигнал частоты вращения с помощью модуля ввода-вывода блока кнопок и индикатора модулю главной платы управления.
Указанный шаг 3 конкретно в следующем:
Шаг 3.1: Модуль главной платы управления получает сигнал, имитирующий процесс пуска ДУ, и заданный сигнал частоты вращения, после обработки передает сигнал, имитирующий процесс пуска ДУ, и заданный сигнал частоты вращения модулю интерфейсной платы I/O, который передает данный сигнал модулю соединительных кабелей, а модуль соединительных кабелей передает данный сигнал регулятору скорости; Модуль интерфейсной платы I/O одновременно передает данный сигнал блоку кнопок и индикаторов, который преобразует данный электрический сигнал в световой сигнал, который отображается на индикаторе на блоке кнопок и индикаторов;
Шаг 3.2: получив сигнал, имитирующий процесс запуска ДУ, и заданный сигнал частоты вращения, РС начинает работу через собственную внутреннюю логику управления и выводит сигнал обратной связи о степени открытия дросселя по заданному сигналу скорости вращения, полученному в реальном времени, и передает сигнал обратной связи о степени открытия дросселя через модуль соединительных кабелей в модуль интерфейсной платы I/O.
Указанный шаг 4 конкретно в следующем:
Шаг 4.1: модуль интерфейсной платы I/O получает сигнал обратной связи о степени открытия дросселя и передает этот сигнал модулю главной платы управления, который осуществляет сбор и обработку в реальном масштабе времени сигнала обратной связи о степени открытия дросселя, и передает данный сигнал модулю видеокадров конфигурации;
Шаг 4.2: модуль видеокадров конфигурации получает сигнал обратной связи о степени открытия дросселя, преобразует данный электрический сигнал в кривую сигнала обратной связи о степени открытия дросселя и показывает на видеокадрах конфигурации. Путем сравнения кривой сигнала обратной связи о степени открытия дросселя со стандартной кривой степени открытия дросселя убедиться, что характеристика РС нормальная или нет; При наличии отклонения между кривой сигнала обратной связи открытия дросселя и стандартной кривой открытия дросселя функция РС считается нормальной; При отсутствии отклонения – считается ненормальной
Указанный шаг 5 конкретно в следующем: через модуль испытательной программы передать сигнал суждения (нормально или ненормально) модулю испытательной кнопки блока кнопок и индикаторов, после получения сигнала суждения (нормально или ненормально) модуль испытательной кнопки преобразует данный электрический сигнал в световой сигнал, который отображается на индикаторе.
Указанный шаг 6 конкретно в следующем: с помощью кнопки сохранения на модуле видеокадров конфигурации можно сохранить кривую сигнала обратной связи о степени открытия дросселя в модуле памяти, одновременно можно открыть данную кривую с помощью модуля кадров конфигурации.
Полезными техническими эффектами настоящего изобретения являются:
1. Устройство автономного испытания РС, указанное в настоящем изобретении, позволяет вручную подавать команды на РС путем ручного вывода сигналов модулю главной платы управления через модуль ввода-вывода блока кнопок и индикаторов, таким образом осуществляется ручная подача команды регулятору скорости.
2. Устройство автономного испытания РС, указанное в настоящем изобретении, выбирает режим испытания с помощью модуля видеокадров конфигурации, подает команду запуска модулю испытательной программы, который запускает алгоритм испытательной программы в этом режиме после получения команды запуска, и выдает сигнал, имитирующий процесс запуска ДУ и заданный сигнал частоты вращения модулю главной платы управления, таким образом реализует моделирование состояния работы ДУ.
3. Устройство автономного испытания РС, указанное в настоящем изобретении, позволяет моделировать состояние работы ДУ путем ручного вывода сигнала, имитирующего процесс запуска ДУ и сигнала частоты вращения модулю главной платы управления через модуль ввода-вывода блока кнопок и индикаторов.
4. Устройство автономного испытания РС, указанное в настоящем изобретении с помощью модуля испытательной программы может программировать несколько испытательных режимов и автоматически подать испытательный сигнал с помощью кнопки запуска на модуле видеокадров конфигурации, выполнять автономное испытание РС в различных рабочих режимах.
5. Устройство автономного испытания РС, указанное в настоящем изобретении, вручную выдает испытательный сигнал через модуль ввода-вывода и получает сигнал обратной связи, выполняет автономное испытание РС.
6. Устройство автономного испытания РС, указанное в настоящем изобретении, получает сигнал обратной связи о степени открытия дросселя через модуль видеокадров конфигурации и преобразует данный сигнал от электрического сигнала в кривую сигнала обратной связи о степени открытия дросселя, показывается на видеокадрах конфигурации. Путем сравнения кривой сигнала обратной связи о степени открытия дросселя со стандартной кривой степени открытия дросселя можно подтвердить, что характеристика РС нормальная или нет;
7. Устройство автономного испытания РС, указанное в настоящем изобретении, передает сигнал суждения (нормально или ненормально) через модуль испытательной программы в модуль испытательной кнопки блока кнопок и индикаторов, после получения сигнала суждения (нормально или ненормально) модуль испытательной кнопки преобразует данный электрический сигнал в световой сигнал, который отображается на индикаторе, таким образом можно автоматически определить, что РС нормальный или нет.
8. Устройство автономного испытания РС, указанное в настоящем изобретении, с помощью кнопки сохранения на модуле видеокадров конфигурации может сохранить кривую сигнала обратной связи о степени открытия дросселя в модуле хранения, одновременно можно открыть данную кривую через модуль видеокадров конфигурации.
9. Устройство автономного испытания РС, указанное в настоящем изобретении, с помощью модуля испытательной программы программирует разные испытательные программы, может выполнять функции автономного испытания других РС, имеет высокую степень универсальности, имеет большую ценность для внедрения на других АЭС.
Краткое описание чертежей
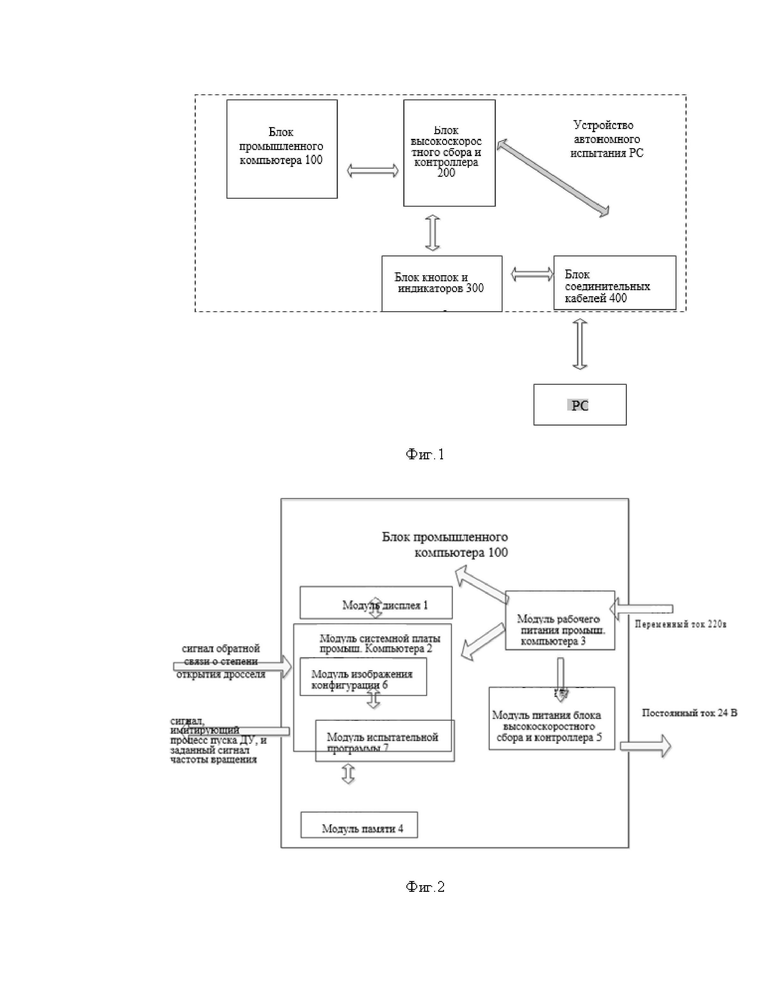
Фиг. 1 – Принципиальная схема устройства автономного испытания РС для данного изобретения.
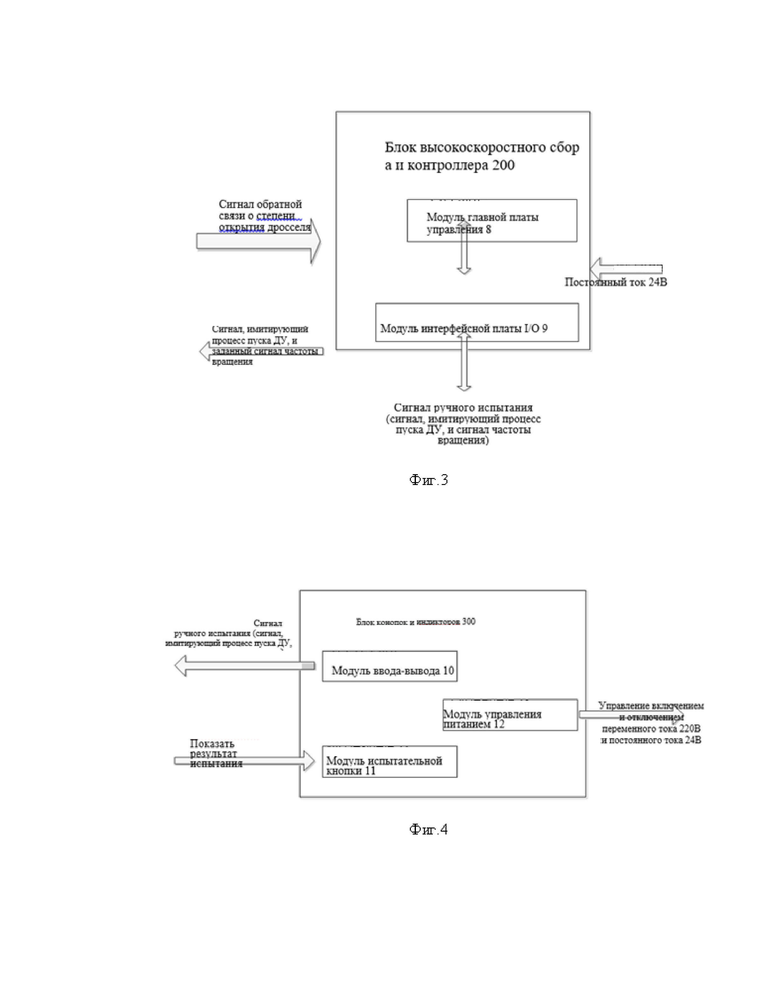
Фиг. 2 – Принципиальная схема блока промышленного компьютера устройства автономного испытания РС для данного изобретения.
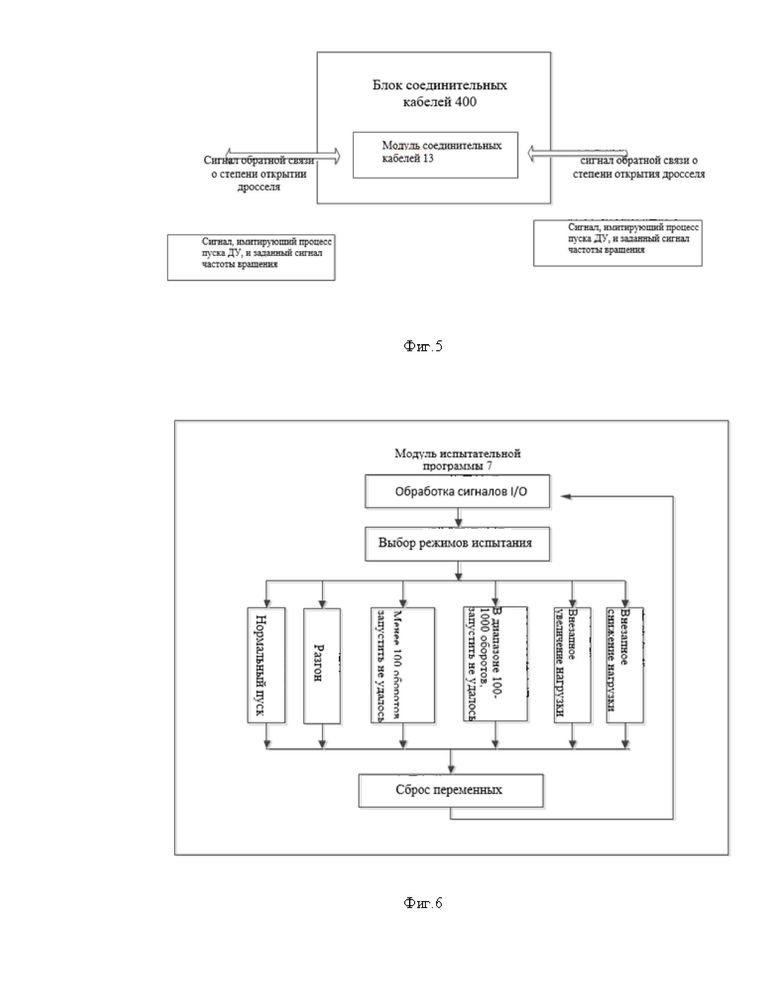
Фиг. 3 – Принципиальная схема блока высокоскоростного сбора и контроллера устройства автономного испытания РС для данного изобретения.
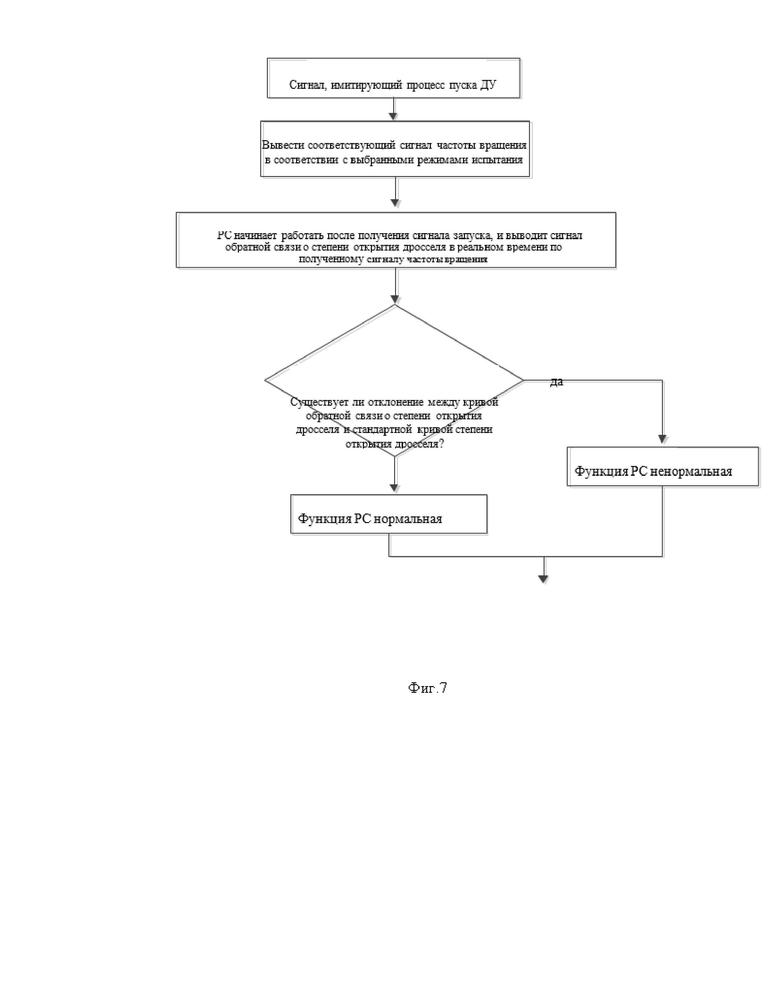
Фиг. 4 – Принципиальная схема блока кнопок и индикаторов устройства автономного испытания РС для данного изобретения.
Фиг. 5 – Принципиальная схема блока соединительных кабелей устройства автономного испытания РС для данного изобретения.
Фиг. 6 – Принципиальная схема блока модуля испытательной программы устройства автономного испытания РС для данного изобретения.
Фиг. 7 – Принципиальная схема метода испытания устройства автономного испытания РС для данного изобретения.
Осуществление изобретения
Далее приведено подробное описание настоящего изобретения в сочетании с прилагаемыми схемами и вариантами осуществления.
Как показано на схеме фиг.1, устройство автономного испытания РС, представленное в настоящем изобретении, включает: блок промышленного компьютера 100, блок высокоскоростного сбора и контроллера 200, блок кнопок и индикаторов 300 и блок соединительных кабелей 400. Блок соединительных кабелей 400 соединяется с РС для осуществления функции передачи различных испытательных сигналов, контрольных сигналов между устройством автономного испытания и РС; Блок соединительных кабелей 400 соединяется с блоком высокоскоростного сбора и контроллера 200 для осуществления функции сбора различных испытательных сигналов и вывода контрольных сигналов; Блок промышленного компьютера 100 соединяется с блоком высокоскоростного сбора и контроллера 200 для осуществления вывода испытательного сигнала РС в РС и сбора сигнала обратной связи от РС, и показывается на видеокадрах конфигурации, автоматически выполняет функцию автономного испытания РС с помощью испытательной программы для многих режимов внутри промышленного компьютера; Блок кнопок и индикаторов 300 отдельно соединяется с блоком промышленного компьютера 100 и блоком высокоскоростного сбора и контроллера 200 , с помощью кнопок на блоке кнопок и индикаторов осуществляется функция ручного вывода испытательного сигнала в блок промышленного компьютера 100 и блок высокоскоростного сбора и контроллера 200, с помощью индикаторов на блоке кнопок и индикаторов осуществляется функция отображения испытательного сигнала.
Как показано на схеме фиг. 2,блок промышленного компьютера 100 включает модуль дисплея 1, модуль системной платы промышленного компьютера 2, модуль рабочего электропитания промышленного компьютера 3, модуль памяти 4, модуль питания блока высокоскоростного сбора и контроллера 5, модуль видеокадров конфигурации 6 и модуль испытательной программы 7. Входной конец модуля рабочего электропитания промышленного компьютера 3 подключен к внешнему источнику питания 220 В, а выходной конец соответственно подключен к входному концу модуля дисплея 1, модуля системной платы промышленного компьютера 2 и модуля питания блока высокоскоростного сбора и контроллера 5. Модуль видеокадров конфигурации 6 и модуль испытательной программы 7 устанавливаются в модуле системной платы промышленного компьютера 2, и выходной конец модуля системной платы промышленного компьютера 2 соединяется с входным концом модуля дисплея 1; Выходной конец модуля системной платы промышленного компьютера 2 соединяется с входом модуля памяти 4.
Модуль рабочего электропитания промышленного компьютера 3 выводит переменный ток 220В, модуль дисплея 1, модуль системной платы промышленного компьютера 2 и модуль питания блока высокоскоростного сбора и контроллера принимают переменный ток 220В для осуществления функции электроснабжения модуля дисплея 1, модуля системной платы промышленного компьютера 2 и модуля питания блока высокоскоростного сбора и контроллера 5; После получения переменного тока 220 В модуль питания высокоскоростного сбора и контроллера 5 преобразует переменный ток 220 В в постоянный ток 24 В для питания модуля интерфейсной платы I/O 38 блока высокоскоростного сбора и контроллера 200; Модуль системной платы промышленного компьютера 2 обрабатывает и анализирует сигналы, собранные и переданные обратно регулятором скорости, путем вызова загруженной испытательной программы из модуля внутренней испытательной программы 7 и определяет, нормально ли работает РС; Сигналы и кривые в процессе испытания обрабатываются через модуль видеокадров конфигурации 6, в конечном итоге они будут отображается на модуле дисплея 1, чтобы осуществить загрузку различных программ режима испытания при автономном испытании РС, а также функцию отображения конфигурации; Модуль системной платы промышленного компьютера 2 будет хранить испытательную кривую в модуле памяти 4, чтобы реализовать функцию хранения кривой автономного испытания РС. Модуль видеокадров конфигурации 6 включает изображение конфигурации автономного испытания, для проведения испытания можно выбрать разные режимы, одновременно можно показать кривую испытательного сигнала в реальном времени, а также кривую в реальном времени с несколькими сигналами работы РС в процессе испытания, внутри модуля испытательной программы 7 есть загруженные программы испытания с шестью разными испытательными режимами, как показано на схеме 6, а также стандартную кривую открытия дросселя, с помощью модуля видеокадров конфигурации 6 можно выбрать соответствующую программу рабочего режима для испытания. В процессе испытания РС выводит кривую обратной связи о степени открытия дросселя. Сравнивая отклонение между кривой обратной связи о степени открытия дросселя и стандартной кривой открытия дросселя в модуле видеокадров конфигурации 6, реализуется функция проверки работоспособности РС.
Как показано на схеме фиг. 3, блок высокоскоростного сбора и контроллера 200 включает модуль главной платы управления 8, модуль интерфейсной платы I/O 9, входной конец модуля главной платы управления 8 соединяется с выходным концом модуля интерфейсной платы I/O 9, выходной конец модуля главной платы управления 8 соединяется с модулем системной платы промышленного компьютера 2 блока промышленного компьютера 100, входной конец модуля интерфейсной платы I/O 9 соединяется с выходным концом РС, входной конец модуля интерфейсной платы I/O 9, входной конец модуля главной платы управления 8 также соединяется с модулем питания блока высокоскоростного сбора и контроллера 5 для блока промышленного компьютера 100.
Модуль испытательной программы 7 и модуль видеокадров конфигурации 7 передают сигнал, имитирующий процесс запуска ДУ, и заданный сигнал частоты вращения на РС через модуль интерфейсной платы I/O 9; РС выводит сигнал обратной связи о степени открытия дросселя на модуль 9 интерфейсной платы I/O 9, а модуль интерфейсной платы I/O 9 передает сигнал обратной связи о степени открытия дросселя на модуль внутренней испытательной программы 7 главной платы управления 8 и на модуль видеокадров конфигурации 6 для анализа и оценки данных; Модуль питания блока высокоскоростного сбора и контроллера 5 блока промышленного компьютера 100 выдает постоянный ток 24 В на модуль интерфейсной платы I/O 9 и модуль главной платы управления 8, чтобы реализовать функцию подачи питания для модуля интерфейсной платы 9 и модуля главной платы управления 8.
На фиг. 4, блок кнопок и индикаторов 300 включает модуль ввода-вывода РС 10, модуль испытательной кнопки 11 и модуль управления питанием 12, выходной конец модуля ввода-вывода РС 10 соединяется с модулем интерфейсной платы I/O 9. При переключении ручной реализовать функцию подачи питания для модуля интерфейсной платы 9 и модуля главной платы управления 8.
Как показано на схеме /автоматической кнопки на ручную, можно прямо через кнопку ввода-вывода выдать сигнальную команду регулятору скорости, выполнить функцию ручного испытания, одновременно показать состояние сигнала РС с помощью собственной индикаторной лампы на кнопке ввода-вывода; Выходной конец модуля испытательной кнопки 11 соединен с входным концом модуля главной платы управления 8, можно управлять запуском и остановкой испытательной программы в модуле испытательной программы 7 с помощью кнопки, и показать результаты испытания РС с помощью собственной индикаторной лампы кнопки; Модуль управления питанием 12 соединен с модулем рабочего питания промышленного компьютера 3 и модулем питания блока высокоскоростного сбора данных и контроллера 5, и управляет выходом питания модуля рабочего питания промышленного компьютера 3 и модуля питания блока высокоскоростного сбора и контроллера 5 непосредственно с помощью кнопок.
Как показано на схеме фиг. 5, блок соединительных кабелей 400 включает в себя модуль соединительных кабелей 13, а два конца модуля соединительных кабелей 13 соединены соответственно с РС и модулем интерфейсной платы I/O 9; Модуль интерфейсной платы I/O 9 передает сигнал, имитирующий процесс пуска ДУ, и заданный сигнал частоты вращения регулятору скорости через модуль соединительных кабелей 13; РС выдает сигнал обратной связи о степени открытия дросселя модулю интерфейсной платы I/O через модуль соединительных кабелей 13.
Как показано на схеме фиг.7, устройство автономного испытания РС, представленное в настоящем изобретении, включает следующие шаги:
Шаг 1: имитировать сигнал процесса запуска ДУ;
Шаг 1.1: после нажатия копки модуля управления питанием 12 модуль рабочего питания 3, управляющий промышленным компьютером, включается, а модуль рабочего питания промышленного компьютера 3 выдает переменный ток 220 В, который направляется на модуль дисплея 1 и модуль системной платы промышленного компьютера 2 для обеспечения их электропитанием 220 В, а также для модуля питания блока высокоскоростного сбора и контроллера 5;
Шаг 1.2: после нажатия кнопки модуля управления питанием 12 модуль питания блока высокоскоростного сбора и контроллера включается, а модуль питания высокоскоростного сбора данных и контроллера 5 выводит постоянный ток 24В, который подается на модуль интерфейсной платы I/O 9 и модуль главной платы управления 8 для обеспечения их питанием 24В.
Шаг 2: вывести соответствующий заданный сигнал частоты вращения в соответствии с выбранными режимами испытания;
Выбирать режим испытания через модуль видеокадров конфигурации 6, подать команду запуска модулю испытательной программы 7, модуль испытательной программы 7 получает команду запуска и запускает работу алгоритма испытательной программы в данном режиме, и выводит сигнал, имитирующий процесс запуска ДУ, и заданный сигнал частоты вращения модулю главной платы управления 8; Или вручную вывести сигнал, имитирующий процесс пуска ДУ, и сигнал частоты вращения с помощью модуля ввода-вывода 10 блока кнопок и индикатора 300 модулю главной платы управления 8.
Шаг 3: РС начинает работать после получения сигнала запуска, и выводит сигнал обратной связи о степени открытия дросселя в реальном времени по полученному сигналу частоты вращения;
Шаг 3.1: Модуль главной платы управления 8 получает сигнал, имитирующий процесс пуска ДУ, и заданный сигнал частоты вращения, после обработки передает сигнал, имитирующий процесс пуска ДУ, и заданный сигнал частоты вращения модулю интерфейсной платы I/O 9, который передает данный сигнал модулю соединительных кабелей 13, а модуль соединительных кабелей 13 передает данный сигнал РС; Модуль интерфейсной платы I/O 9 одновременно передает данный сигнал блоку кнопок и индикаторов 300, который преобразует данный электрический сигнал в световой сигнал, который отображается на индикаторе на блоке кнопок и индикаторов 300;
Шаг 3.2: получив сигнал, имитирующий процесс запуска ДУ, и заданный сигнал частоты вращения, РС начинает работу через собственную внутреннюю логику управления, и выводит сигнал обратной связи о степени открытия дросселя по заданному сигналу скорости вращения, полученному в реальном времени, и передает сигнал обратной связи о степени открытия дросселя через модуль соединительных кабелей 13 модулю интерфейсной платы I/O 9.
Шаг 4: сравнить кривую обратной связи о степени открытия дросселя со стандартной кривой степени открытия дросселя, чтобы убедиться, что РС работает нормально или нет.
Шаг 4.1: модуль интерфейсной платы I/O 9 получает сигнал обратной связи о степени открытия дросселя и передает этот сигнал модулю главной платы управления 8, который осуществляет сбор и обработку в реальном масштабе времени сигнала обратной связи о степени открытия дросселя, и передает данный сигнал модулю видеокадров конфигурации 6;
Шаг 4.2: модуль видеокадров конфигурации 6 получает сигнал обратной связи о степени открытия дросселя, преобразует данный электрический сигнал в кривую сигнала обратной связи о степени открытия дросселя и показывает на видеокадрах конфигурации. Путем сравнения кривой сигнала обратной связи о степени открытия дросселя со стандартной кривой степени открытия дросселя убедиться, что характеристика РС нормальная или нет; При наличии отклонения между кривого сигнала обратной связи о степени открытия дросселя и стандартной кривой степени открытия дросселя функция РС считается нормальной; При отсутствии отклонения – считается ненормальной.
Шаг 5: индикатор показывает, что функция РС нормальная или ненормальная;
Через модуль испытательной программы 7 передать сигнал суждения (нормально или ненормально) модулю испытательной кнопки 11 блока кнопок и индикаторов 300, после получения сигнала суждения (нормально или ненормально) модуль испытательной кнопки 11 преобразует данный сигнал от электрического сигнала в световой сигнал, который отображается на индикаторе.
Шаг 6: сохранить кривую сигнала обратной связи о степени открытия дросселя
С помощью кнопки сохранения на модуле видеокадров конфигурации 6 можно сохранить кривую сигнала обратной связи о степени открытия дросселя в модуле памяти 4, одновременно можно открыть данную кривую через модуль видеокадров конфигурации 6.
Выше приведено подробное описание данного изобретения со ссылкой на приложенные схемы и с примерами осуществления, но данное изобретение не ограничивается вышеуказанным примерами осуществления, в пределах знаний, которыми обладают обычные технические персоналы в данной области, еще можно внести различные изменения, не отступая от цели данного изобретения. Сведения, подробно не описанные в данном изобретении, могут быть приняты из существующего уровня техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ ВИДЕОПОИСК | 2013 |
|
RU2647696C2 |
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |
| БЛОК АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ (БАР) | 2010 |
|
RU2457530C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ НА ПОЛНОМ ЭКРАНЕ | 2015 |
|
RU2654148C2 |
| Система удаленного доступа в квартиру | 2023 |
|
RU2823662C1 |
| ТЕХНОЛОГИИ ДЛЯ ДЕТЕКТИРОВАНИЯ ВИДЕОКОПИИ | 2009 |
|
RU2505859C2 |
| Система формирования комплектов товаров или комплектующих | 2019 |
|
RU2732168C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОТОГРАФИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2015 |
|
RU2634909C2 |
| СИСТЕМА РАСПРЕДЕЛЕННЫХ БАЗОВЫХ СТАНЦИЙ, СПОСОБ ОРГАНИЗАЦИИ СЕТИ, СОДЕРЖАЩИЙ ТАКУЮ СИСТЕМУ, И БЛОК БАЗОВОГО ДИАПАЗОНА | 2006 |
|
RU2364057C2 |
| Устройство релейной защиты и автоматики (варианты) | 2015 |
|
RU2615138C1 |
Группа изобретений относится к области автономного испытания регулятора скорости (РС). Устройство автономного испытания регулятора скорости содержит блок промышленного компьютера, блок высокоскоростного сбора и контроллера, блок кнопок и индикаторов и блок соединительных кабелей. Блок соединительных кабелей соединяется с РС. Блок соединительных кабелей соединяется с блоком высокоскоростного сбора и контроллера. Блок промышленного компьютера соединяется с блоком высокоскоростного сбора и контроллера. Блок кнопок и индикаторов отдельно соединяется с блоком промышленного компьютера и блоком высокоскоростного сбора и контроллера. Устройство выполнено с возможностью имитировать рабочее состояние дизельной установки (ДУ) и команды на месте, проводить автономное испытание РС, снизить вероятность возникновения неисправности РС при работе ДУ в режиме онлайн, уменьшить время неработоспособного состояния ДУ, тем самым обеспечить безопасную и надежную работу системы ДУ и АЭС. 2 н. и 10 з.п. ф-лы, 7 ил.
1. Устройство автономного испытания регулятора скорости, характеризующееся тем, что оно включает в себя блок промышленного компьютера (100), блок высокоскоростного сбора и контроллера (200), блок кнопок и индикаторов (300) и блок соединительных кабелей (400), при этом блок соединительных кабелей (400) соединен с регулятором скорости (РС) для осуществления функции передачи различных испытательных сигналов, управляющих сигналов между устройством автономного испытания и РС; блок соединительных кабелей (400) соединен с блоком высокоскоростного сбора и контроллера (200) для осуществления функции сбора различных испытательных сигналов и вывода управляющих сигналов; блок промышленного компьютера (100) соединен с блоком высокоскоростного сбора и контроллера (200) для осуществления вывода испытательных сигналов РС в РС и сбора сигнала обратной связи от РС, и показывается на изображении конфигурации, автоматически выполняет функцию автономного испытания РС с помощью испытательной программы для многих режимов внутри промышленного компьютера; блок кнопок и индикаторов (300) отдельно соединяется с блоком промышленного компьютера (100) и блоком высокоскоростного сбора и контроллера (200), с помощью кнопок на блоке кнопок и индикаторов осуществляется функция ручного вывода испытательного сигнала в блок промышленного компьютера (100) и блок высокоскоростного сбора и контроллера (200), с помощью индикаторов на блоке кнопок и индикаторов осуществляется функция отображения испытательных сигналов.
2. Устройство по п. 1, характеризующееся тем, что указанный блок промышленного компьютера (100) включает в себя модуль дисплея (1), модуль системной платы промышленного компьютера (2), модуль рабочего электропитания промышленного компьютера (3), модуль памяти (4), модуль питания блока высокоскоростного сбора и контроллера (5), модуль видеокадров конфигурации (6) и модуль испытательной программы (7), при этом входной конец модуля рабочего электропитания промышленного компьютера (3) подключен к внешнему источнику питания 220 В, а выходной конец соответственно подключен к входному концу модуля дисплея (1), модуля системной платы промышленного компьютера (2) и модуля питания блока высокоскоростного сбора и контроллера (5), причем модуль видеокадров конфигурации (6) и модуль испытательной программы (7) установлены в модуле системной платы промышленного компьютера (2), а выходной конец модуля системной платы промышленного компьютера (2) соединен с входным концом модуля дисплея (1); выходной конец модуля системной платы промышленного компьютера (2) соединен с входом модуля памяти (4).
3. Устройство по п. 2, характеризующееся тем, что указанный блок высокоскоростного сбора и контроллера (200) включает модуль главной платы управления (8), модуль интерфейсной платы I/O (9), входной конец модуля главной платы управления (8) соединен с выходным концом модуля интерфейсной платы I/O (9), выходной конец модуля главной платы управления (8) соединен с модулем системной платы промышленного компьютера (2) блока промышленного компьютера (100), входной конец модуля интерфейсной платы I/O (9) соединен с выходным концом РС, при этом входной конец модуля интерфейсной платы I/O (9) и входной конец модуля главной платы управления (8) также соединены с модулем питания блока высокоскоростного сбора и контроллера (5) для блока промышленного компьютера (100).
4. Устройство по п. 3, характеризующееся тем, что указанный блок высокоскоростного сбора и контроллера (300) включает в себя модуль ввода-вывода РС (10), модуль испытательной кнопки (11) и модуль управления питанием (12), выходной конец модуля ввода-вывода РС (10) соединен с модулем интерфейсной платы I/O (9), причем при переключении ручной/автоматической кнопки на ручную можно прямо с помощью кнопки ввода-вывода выдать сигнальную команду регулятору скорости, выполнить функцию ручного испытания, одновременно показать состояние сигнала РС с помощью индикаторной лампы на кнопке ввода-вывода, при этом выходной конец модуля испытательной кнопки (11) соединен с входным концом модуля главной платы управления (8) с возможностью управления запуском и остановкой испытательной программы в модуле испытательной программы (7) с помощью кнопки, и показания результатов испытания РС с помощью собственной индикаторной лампы кнопки, а модуль управления питанием (12) соединен с модулем рабочего питания промышленного компьютера (3) и модулем питания блока высокоскоростного сбора данных и контроллера (5) и управляет выходом питания модуля рабочего питания промышленного компьютера (3) и модуля питания блока высокоскоростного сбора и контроллера (5) непосредственно с помощью кнопок.
5. Устройство по п. 4, характеризующееся тем, что указанный блок соединительных кабелей (400) включает в себя модуль соединительных кабелей (13), а два конца модуля соединительных кабелей (13) соединены соответственно с РС и модулем интерфейсной платы I/O (9); модуль интерфейсной платы I/O (9) передает сигнал, имитирующий процесс пуска дизельной установки (ДУ), и заданный сигнал частоты вращения регулятору скорости через модуль соединительных кабелей (13); РС выдает сигнал обратной связи о степени открытия дросселя модулю интерфейсной платы I/O (9) через модуль соединительных кабелей (13).
6. Способ автономного тестирования регулятора скорости с использованием автономного тестового устройства регулятора скорости по п. 5, характеризующийся тем, что указанный способ включает следующие шаги:
Шаг 1: имитируют сигнал процесса запуска ДУ;
Шаг 2: выводят соответствующий заданный сигнал частоты вращения в соответствии с выбранными режимами испытания;
Шаг 3: РС начинает работать после получения сигнала запуска и выводит сигнал обратной связи о степени открытия дросселя в реальном времени по полученному сигналу частоты вращения;
Шаг 4: сравнивают кривую обратной связи о степени открытия дросселя со стандартной кривой степени открытия дросселя, чтобы убедиться, что РС работает нормально или нет;
Шаг 5: индикатор показывает, что функция РС нормальная или ненормальная;
Шаг 6: сохраняют кривую сигнала обратной связи о степени открытия дросселя.
7. Способ по п. 6, характеризующийся тем, что указанный шаг 1 заключается в следующем:
Шаг 1.1: после нажатия копки модуля управления питанием (12) модуль рабочего питания (3) промышленного компьютера включают, а модуль рабочего питания промышленного компьютера (3) выдает переменный ток 220 В, который подают на модуль дисплея (1) и модуль системной платы промышленного компьютера (2) для обеспечения их электропитанием 220 В, а также подают на модуль питания блока высокоскоростного сбора и контроллера (5);
Шаг 1.2: после нажатия кнопки модуля управления питанием (12) модуль питания блока высокоскоростного сбора и контроллера включают (5), а модуль питания высокоскоростного сбора данных и контроллера (5) выводит постоянный ток 24 В, который подают на модуль интерфейсной платы I/O (9) и модуль главной платы управления (8) для обеспечения их питанием 24 В.
8. Способ по п. 7, характеризующийся тем, что указанный шаг 2 заключается в следующем: выбирают режим испытания через модуль изображения конфигурации (6), выдают команду запуска модулю испытательной программы (7), после получения команды запуска модуль испытательной программы (7) запускает работу алгоритма испытательной программы в данном режиме и выводит сигнал, имитирующий процесс запуска ДУ, и заданный сигнал частоты вращения модулю главной платы управления (8); или вручную выводят сигнал, имитирующий процесс пуска ДУ, и сигнал частоты вращения с помощью модуля ввода-вывода (10) блока кнопок и индикатора (300) модулю главной платы управления (8).
9. Способ по п. 8, характеризующийся тем, что указанный шаг 3 заключается в следующем:
Шаг 3.1: модуль главной платы управления (8) получает сигнал, имитирующий процесс пуска ДУ, и заданный сигнал частоты вращения, после обработки передает сигнал, имитирующий процесс пуска ДУ, и заданный сигнал частоты вращения модулю интерфейсной платы I/O (9), который передает данный сигнал модулю соединительных кабелей (13), а модуль соединительных кабелей (13) передает данный сигнал регулятору скорости; модуль интерфейсной платы I/O (9) одновременно передает данный сигнал блоку кнопок и индикаторов (300), который преобразует данный электрический сигнал в световой сигнал, который отображают на индикаторе на блоке кнопок и индикаторов (300);
Шаг 3.2: получив сигнал, имитирующий процесс запуска ДУ, и заданный сигнал частоты вращения, РС начинает работу через собственную внутреннюю логику управления и выводит сигнал обратной связи о степени открытия дросселя по заданному сигналу скорости вращения, полученному в реальном времени, и передает сигнал обратной связи о степени открытия дросселя через модуль соединительных кабелей (13) в модуль интерфейсной платы I/O (9).
10. Способ по п. 9, характеризующийся тем, что указанный шаг 4 заключается в следующем:
Шаг 4.1: модуль интерфейсной платы I/O (9) получает сигнал обратной связи о степени открытия дросселя и передает этот сигнал модулю главной платы управления (8), который осуществляет сбор и обработку в реальном масштабе времени сигнала обратной связи о степени открытия дросселя, и передает данный сигнал модулю видеокадров конфигурации (6);
Шаг 4.2: модуль видеокадров конфигурации (6) получает сигнал обратной связи о степени открытия дросселя, преобразует данный электрический сигнал в кривую сигнала обратной связи о степени открытия дросселя и осуществляет показ на видеокадрах конфигурации путем сравнения кривой сигнала обратной связи о степени открытия дросселя со стандартной кривой степени открытия дросселя для убеждения, что характеристика РС нормальная или нет; при наличии отклонения между кривой сигнала обратной связи о степени открытия дросселя и стандартной кривой степени открытия дросселя функция РС считается нормальной, а при отсутствии отклонения – считается ненормальной.
11. Способ по п. 10, характеризующийся тем, что указанный шаг 5 заключается в следующем: через модуль испытательной программы (7) передают сигнал суждения нормально или ненормально модулю испытательной кнопки (11) блока кнопок и индикаторов (300), после получения сигнала суждения нормально или ненормально модуль испытательной кнопки (11) преобразует данный сигнал от электрического сигнала в световой сигнал, который отображается на индикаторе.
12. Способ по п. 11, характеризующийся тем, что указанный шаг 6 заключается в следующем: с помощью кнопки сохранения на модуле видеокадров конфигурации (6) сохраняют кривую сигнала обратной связи о степени открытия дросселя в модуле памяти (4), одновременно открывают данную кривую через модуль видеокадров конфигурации (6).
| CN 112596374 A, 02.04.2021 | |||
| CN 112631236 A, 09.04.2021 | |||
| Способ изготовления изоляционного материала и мелкопористых масс для него | 1933 |
|
SU50305A1 |
| СТЕНД ДЛЯ НАСТРОЙКИ И ИСПЫТАНИЯ РЕГУЛЯТОРА ДИЗЕЛЯ | 2003 |
|
RU2241972C1 |

