Предлагаемое изобретение относится к области военной техники, в частности к области роботизированного вооружения с дистанционным управлением, и может быть использовано для обнаружения и уничтожения воздушных, наземных и надводных целей, на высоких скоростях, одиночных и групповых целей в ручном и автоматическом режимах.
Состав установки: электроспусковой механизм, электрические приводы наведения, кабель, выполненный с возможностью подключения ЭВМ к оружейной установке и системам мониторинга в автоматическом режиме воздушного и наземного пространства с камерами, тепловизором, датчиками, дальномером.
Наиболее близким по технической сути и достигаемому результату к предлагаемому техническому решению является автоматизированный дистанционно управляемый комплекс огневого поражения (1), включающий оружейную часть с единицей дистанционно управляемого оружия, дистанционно управляемое устройство, содержащее по меньшей мере две видеокамеры широкого и узкого поля обзора, приводы горизонтального и вертикального перемещения оружия и спускового механизма, как минимум один дальномер с устройством запоминания дальности объекта-цели относительно дистанционно управляемого устройства, тепловизор, по меньшей мере один датчик учета параметров стрельбы, выбранный из ряда датчиков: термодатчик, датчик атмосферного давления, датчик направления и скорости ветра, блок управления и сопряжения с каналом связи через приемопередающее устройство с компьютером, имеющим монитор и устройство управления. Компьютер выполнен с возможностью программного запоминания изображения местности на N-кадров, их сшивки и слежения за объектом-целью. Оружейная часть выполнена со сменной платформой для установки оружия, устройством амортизации и стационарным или мобильным каркасом-основанием для перемещения и установки на боевой позиции. Комплекс снабжен автономным и/или стационарным источниками питания.
Недостатки комплекса огневого поражения заключаются в следующем.
1. В качестве устройства управления используется джойстик либо графический манипулятор типа "мышь" или "трекбол", с помощью которых наведение на цель требует определенного времени.
2. В комплексе отсутствует система стабилизации оружия, что значительно усложняет процесс наведения оружия на цель при использовании комплекса на подвижном объекте (автомобиль, бронетранспортер и т.д.) и снижает эффективность поражения целей, особенно при движении по пересеченной местности.
Технической задачей, на решение которой направлена полезная модель, является создание автоматизированного дистанционно управляемого комплекса огневого поражения, обладающего расширенной областью применения, например при его установке на подвижных объектах (автомобиль, бронетранспортер, катер и т.д.), и обеспечивающего существенные улучшения тактико-технических и боевых характеристик путем увеличения скорости прицеливания и повышения эффективности поражения целей. Поставленная задача обеспечивается тем, что при использовании существенных признаков, характеризующих известный автоматизированный дистанционно управляемый комплекс огневого поражения, снабженный автономным и/или стационарным источниками питания и включающий оружейную часть с единицей дистанционно управляемого оружия, дистанционно управляемое устройство, содержащее по меньшей мере две видеокамеры широкого и узкого поля обзора, приводы горизонтального и вертикального перемещения оружия и спускового механизма, как минимум один дальномер с устройством запоминания дальности объекта-цели относительно дистанционно управляемого устройства, тепловизор, по меньшей мере, один датчик учета параметров стрельбы, блок управления и сопряжения с каналом связи через приемопередающее устройство с компьютером, имеющим монитор и устройство управления, компьютер выполнен с возможностью программного запоминания изображения местности на N-кадров, их сшивки и слежения за объектом-целью, а оружейная часть выполнена со сменной платформой для установки оружия, устройством амортизации и стационарным или мобильным каркасом-основанием для перемещения и установки на боевой позиции, монитор блока управления имеет сенсорную панель, а сменная платформа для установки оружия содержит устройство гиростабилизации.
Различие между предлагаемым изобретением заключается в следующем:
1. Приборы наблюдения и обнаружения имеют различные характеристики и принципы работы, охват области наблюдения, установленные в изобретении, имеют большую дальность обнаружения и охват;
2. Обнаружение, наведение оружия производится в автоматическом режиме;
3. Оператор, обслуживающий предлагаемое изобретение, выполняет функции развертывания, заряжания боеприпасов, и в ручном режиме ведения огня: выбор цели, выбор режима огня и открытие огня;
4. Устройство и способы размещения аппаратуры: в предлагаемом проекте соединительным звеном служит только общая подставка, орудия и устройства размещения имеют разные крепежные системы. Это позволяет убрать воздействие шаткости производимых при выстреле из орудия;
Ссылка на источник:
href="https://bypatents.com/6-u4961-avtomatizirovannyjj-distancionno-upravlyaemyjj-kompleks-ognevogo-porazheniya.html" rel="bookmark" title="База патентов Беларуси">Автоматизированный дистанционно управляемый комплекс огневого поражения</а> (1)
Сущность изобретения отражает чертеж:
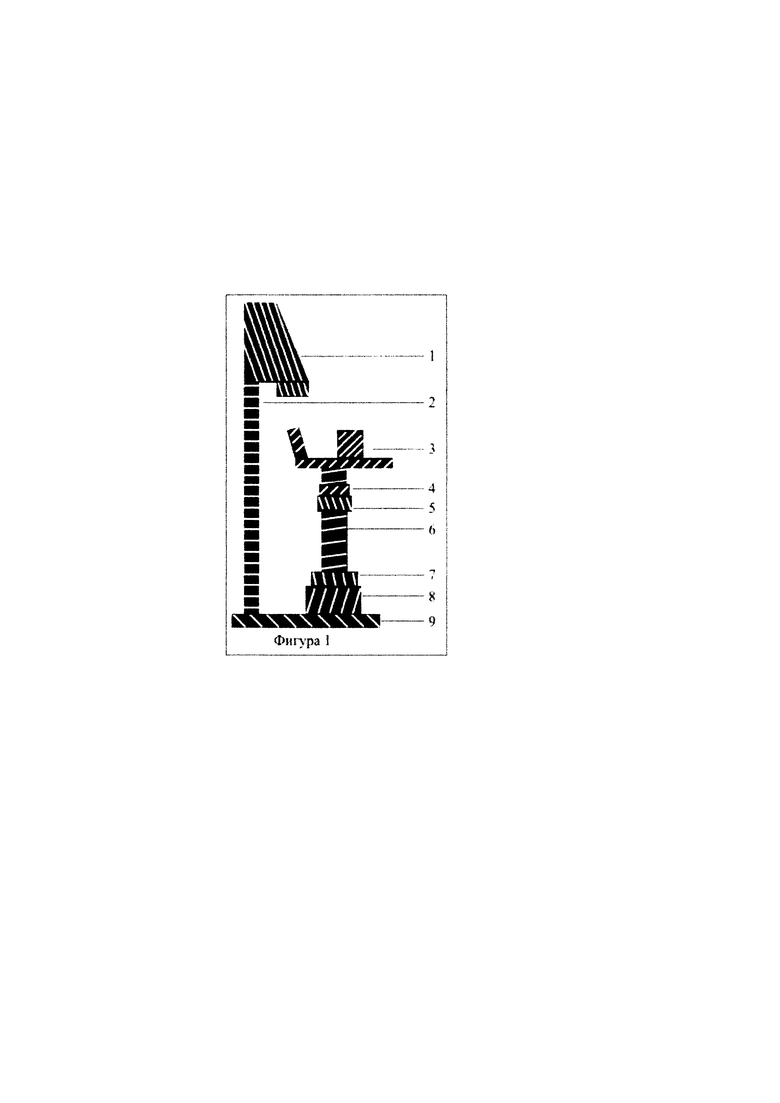
Фигура 1: Вид сбоку.
Фигура 2: Фронтальный вид.
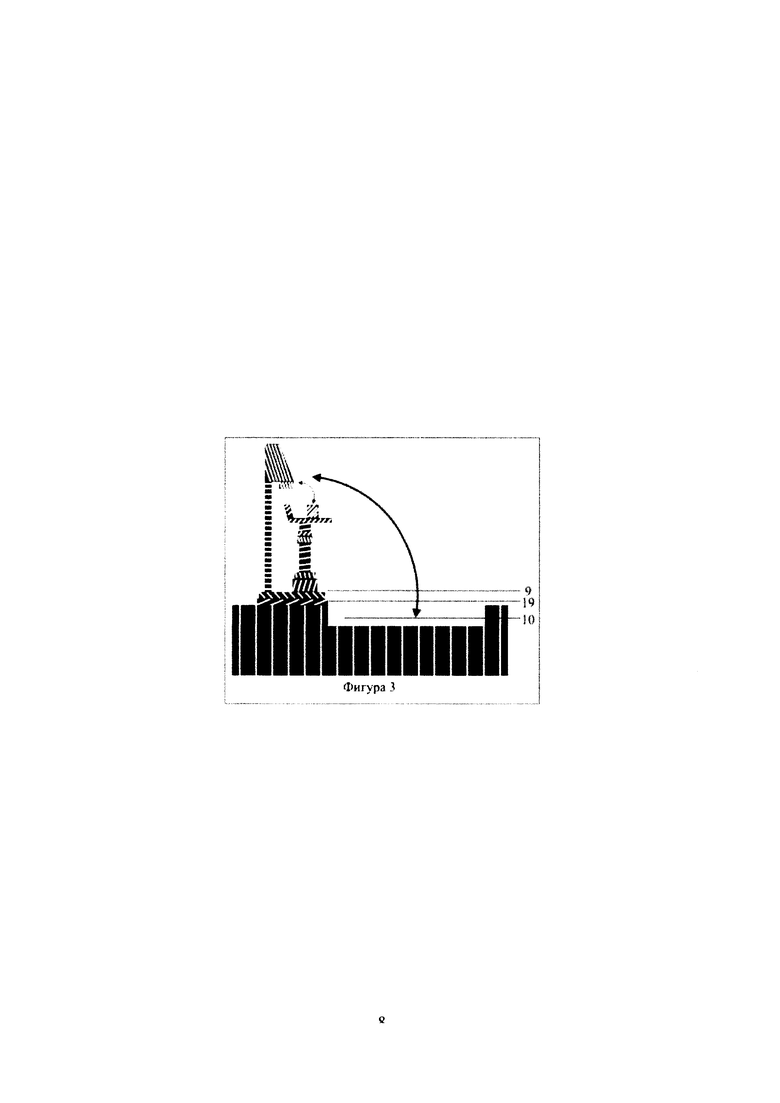
Фигура 3: Размещение на БМ.
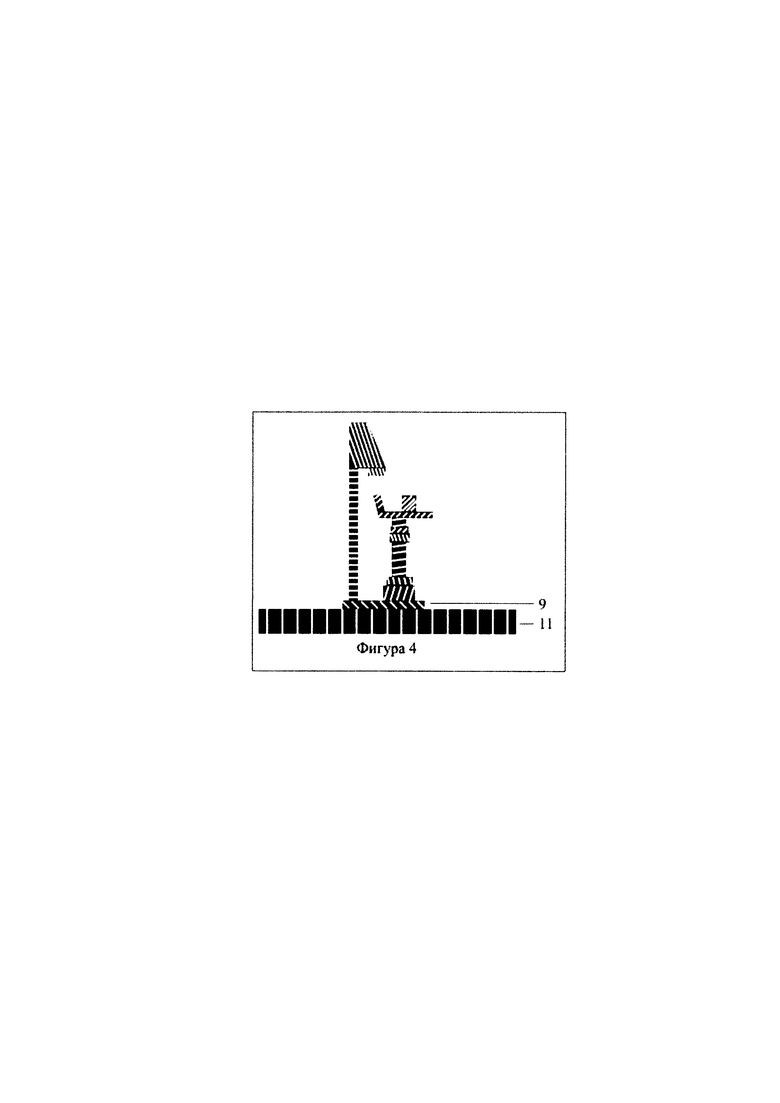
Фигура 4: Размещение стационарно.
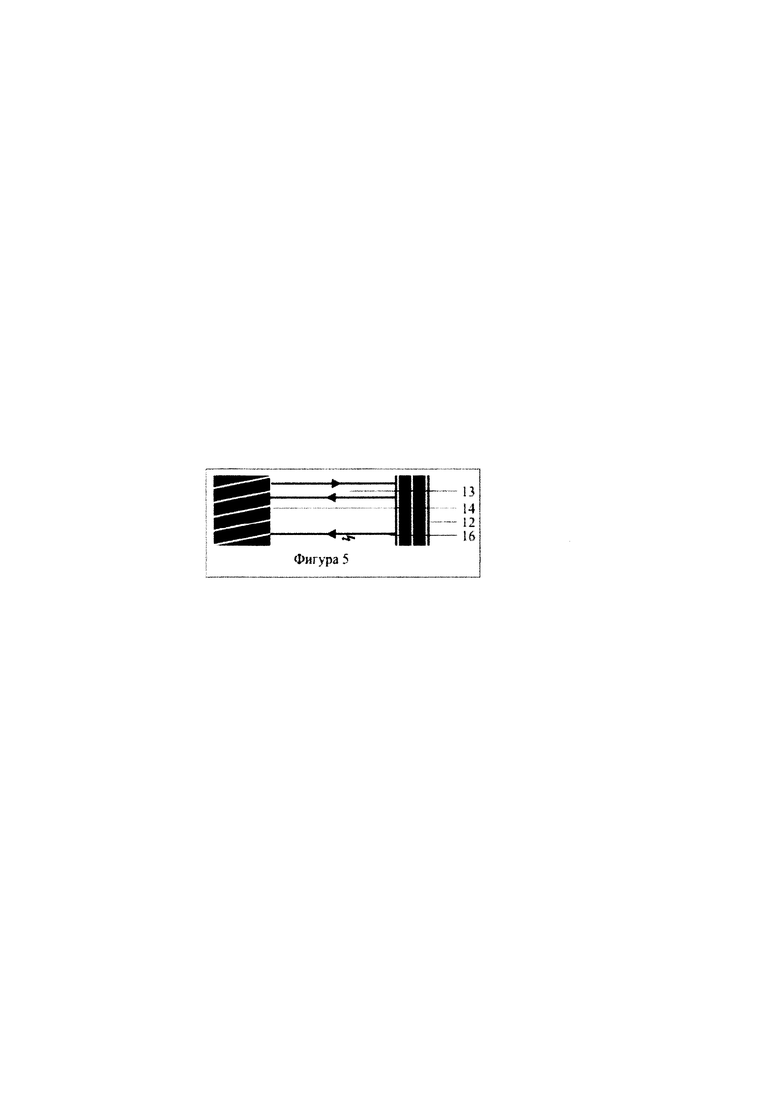
Фигура 5: Связь между установкой и ЭВМ.
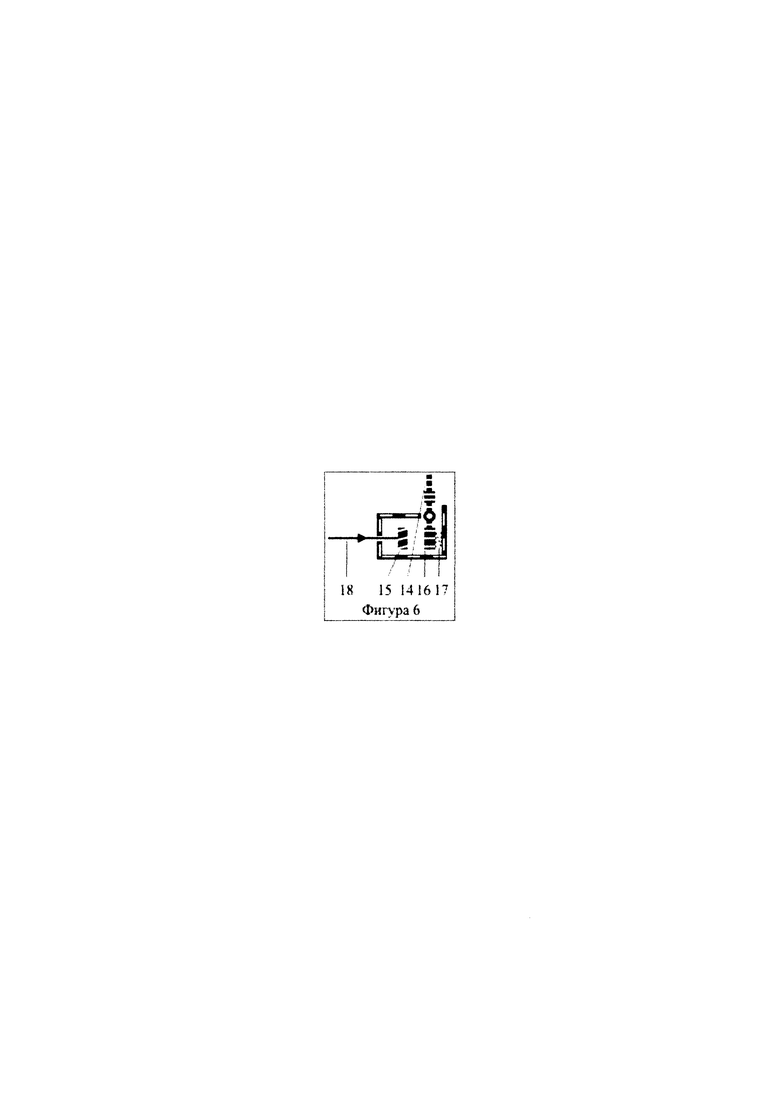
Фигура 6: Схема работы механизма спуска (выстрела).
Указанный технический результат достигается следующим образом:
В верхней части размещены приборы мониторинга (камеры, тепловизор, дальномер, датчик движения), на подставке (1) соединенных с основанием (9), при помощи балки (2).
Орудие закреплено на подставке (3) при помощи тисков, размещенной на балке (6). Вертикальное наведение орудия выполняют электрические приводы (4), (5). Электрический привод (4) вращает основание балки (6) на 1 градус за оборот, электрический привод (5) производит вращение на 10 градусов за 1 оборот. Горизонтальное вращение производят электрические приводы (7), (8) которые производят вращение верхней части балки (6). Электрический привод (7) производит вращение на 1 градус за оборот, электрический привод (8) на 10 градусов за оборот.
Электрические приводы выполняют движения в 2 хода (противоположных направлениях).
Подставка (9) может закрепляться стационарно (11) или на БМ (10). На БМ (10) также установлен электрический привод, который разворачивает сворачивает (19) установку.
Управление установкой (14) производится через ЭВМ (12), соединенную с кабелем (13), по которому на установку подаются токи (16). Обмен информацией о мониторинге с ЭВМ производится в автоматическом режиме, а наведения орудия, по выбору: в автоматическом или ручном режимах.
Открытие огня из орудия производится при помощи спускового крючка (14) взводящего, при выстреле, электроспусковой механизм (15).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ КОМПЛЕКС ОГНЕВОГО ПОРАЖЕНИЯ | 2008 |
|
RU2386920C2 |
| АВТОМАТИЗИРОВАННЫЙ ДИСТАНЦИОННО-УПРАВЛЯЕМЫЙ НАБЛЮДАТЕЛЬНО-ОГНЕВОЙ КОМПЛЕКС | 2018 |
|
RU2718622C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ОРУЖИЯ | 2021 |
|
RU2784528C1 |
| Способ функционирования боевого дистанционно управляемого модуля в различных режимах применения | 2016 |
|
RU2664105C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2839637C1 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
| БРОНИРОВАННАЯ БАШНЯ "ТАЙФУН" БОЕВОЙ МАШИНЫ | 2003 |
|
RU2254546C1 |
| СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСНЫМИ МЕТОДАМИ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2014 |
|
RU2578524C2 |
| Автоматизированный боевой комплекс | 2018 |
|
RU2724448C1 |
| Способ выявления и компенсации ошибки прицеливания ствольного оружия | 2022 |
|
RU2787320C1 |

Роботизированная оружейная установка содержит дистанционное управляемое оружие с ручным и автоматическими режимами, электрические приводы наведения, кабель, выполненный с возможностью подключения ЭВМ к оружейной установке и системам мониторинга в автоматическом режиме воздушного и наземного пространства с камерами, тепловизором, датчиками, дальномером. Установка содержит общее основание, с электрическим приводом разворачивания в случае установки на боевую машину. Балки и подставки для оружия и систем мониторинга установлены на общее основание. Установлены парные электромеханизмы горизонтального и вертикального наведения. Технический результат – обеспечение обнаружения и уничтожения воздушных, наземных и надводных целей, на высоких скоростях, одиночных и групповых целей в ручном и автоматическом режимах. 6 ил.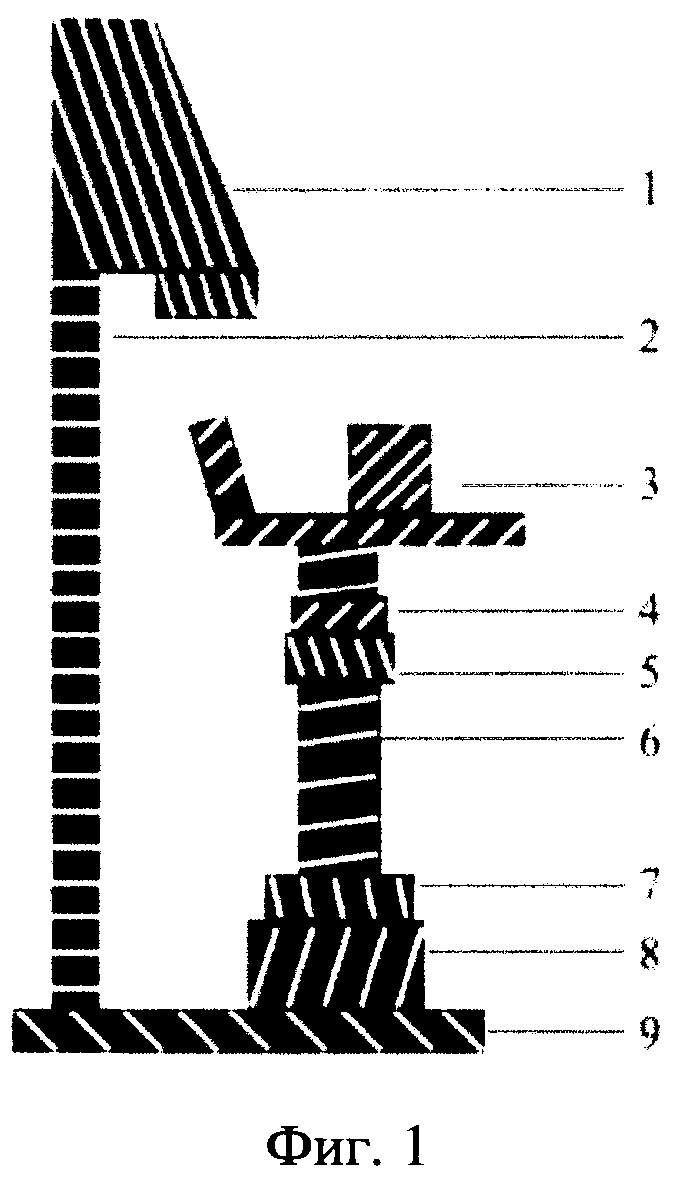
Роботизированная оружейная установка, содержащая дистанционное управляемое оружие с ручным и автоматическими режимами, содержащее электроспусковой механизм, электрические приводы наведения, кабель, выполненный с возможностью подключения ЭВМ к оружейной установке и системам мониторинга в автоматическом режиме воздушного и наземного пространства с камерами, тепловизором, датчиками, дальномером, отличающаяся тем, что содержит общее основание, выполненное с возможностью разворачивания электрическим приводом в случае установки на боевую машину, балки и подставки для оружия и систем мониторинга, выполненные с возможностью установки на общее основание, тиски для крепления оружия, парные электромеханизмы горизонтального и вертикального наведения, выполненные с возможностью наведения на 10 и 1 градус за оборот.
| АВТОМАТИЗИРОВАННЫЙ ДИСТАНЦИОННО-УПРАВЛЯЕМЫЙ НАБЛЮДАТЕЛЬНО-ОГНЕВОЙ КОМПЛЕКС | 2018 |
|
RU2718622C1 |
| АВТОМАТИЗИРОВАННЫЙ ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ КОМПЛЕКС ОГНЕВОГО ПОРАЖЕНИЯ | 2008 |
|
RU2386920C2 |
| Термомагнитный двигатель | 1945 |
|
SU72669A1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СПОСОБ РОБОТИЗИРОВАННОГО ОБЕСПЕЧЕНИЯ ПРИМЕНЕНИЯ ВЫСОКОТОЧНОГО ОРУЖИЯ | 2013 |
|
RU2551390C1 |
| US 4280394 A1, 28.07.1981. | |||
