Область техники
Группа изобретений относится к области военной техники, а именно к комплектованию и использованию боевого стрелкового комплекса, состоящего из:
- автоматических самозарядных стрелковых установок «огневой расчет», использующих разные типы боеприпасов (пули, гранаты, ракеты и т.д.), имеющих бронированную и камуфлированную защиты, управляющихся удаленно, состоящих, в том числе, из конструкций, механизмов и установок, обеспечивающих наведение орудия в горизонтальной и вертикальной плоскостях.;
- имитаторов огневого расчета имитирующих выстрелы визуально вспышкой выстрела, звуком выстрела, и имитацией выхода пороховых газов;
- системы видеонаблюдения состоящих из нескольких систем камер, использующих для видеоконтроля разные виды излучения (в том числе ИК, РЛС, ультрозвук), совместно с программным комплексом, используемая для поиска, распознавания, «захвата» и «ведения» целей, для определения точного направления на цели, и точного расстояния для целей, для целенаведения огневого расчета;
- диагностического оборудования собирающего (и передающего в центр управления) информацию об состоянии окружающей среды, в режиме реального времени, для точного расчета траектории выстрела, подающего данный в центральный блок управления, который управляет целенаведением;
- программного комплекса, состоящего из высокопроизводительной компьютерной системы, автоматизированного управления огневыми средствами, обеспечивающей максимальную оперативность обмена информацией в интересах повышения эффективности огневых средств, для всех необходимых вычислений целе-наведения, работы с целями, видения боя в автоматизированном и автоматическом режимах, причем все элементы боевого комплекса соединены проводными и/или беспроводными средствами связи с центральным блоком управления, причем система содержит электронно-вычислительную машину, аппаратуру передачи данных, технические средства автоматизации процессов обслуживания огневых средств, многоканальное коммутирующее устройство их электрического сопряжения со средствами целеуказания и огневыми средствами;
- панели управления, через которые, любое количество операторов работают с боевым комплексом, в том числе удаленно (из любой точки).
А также относится к способам программирования функционирования боевого комплекса, для выполнения боевых задач любой сложности, в том числе программирования целенаведения в частности, и работой с целями, в общем.
А также относится к способам программирования ведения боя (выполнения боевого задания) в автоматизированном и автоматическом режимах автоматическими огневыми позициями, в том числе, совместно с людьми бойцами и людьми снайперами.
А также относится к способам использования, в целях выполнения боевого задания, беспилотной авиации, дронов, и спутниковых технологий для фото- и видеофиксации зоны боевого задания и уточненной глонасс (GPS) навигации.
Уровень техники
Известны: «способ компьютерного надзора за положением ствола оружия относительно цели и устройство для его осуществления»: RU 2499217 С2, Заявка: 2011139788/12, 29.09.2011
На период времени, длящийся между спуском спускового крючка и до освобождения боевой пружины, функцию надзора за положением ствола оружия относительно цели передают на устройство, в котором данные, полученные при спуске спускового крючка в момент фиксации надзорного контакта спускового крючка и до момента отсыла разрешительной команды процессором/компьютером на надзиратель, сравнивают с эталоном/образца. По результатам сравнения дают или не дают разрешительную команду на автоматический выстрел. Устройство включает в себя процессор/компьютер, который также позволяет поправлять марку на дисплее на основе данных - расстояние, метеоусловия, вносимых стрелком и/или устройством.
Главным минусом остается участие в качестве снайпера человека, со всеми вытекающими негативными обстоятельствами «человеческого фактора». Снайпер может не «поймать» то самое положение, при которой автоматика даст разрешительную команду.
Во вторых: снайпер может «поймать» положение целенаведения, расцененное компьютером как «идеальное» случайно, в процессе движения ствола, от (неидеального) к (неидеальному). Предложенная технология целеопределения предполагает фиксирование «картинки» соответствующее (идеально), но не предполагает анализ, находится в этот момент ствол орудия в движении, или в неподвижности. Таким образом, если в момент случайного попадания цели, при движении ствола, произойдет разрешительная команда, и выстрел, произойдет промах, ибо система не анализирует и не делает поправок на движение ствола орудия снайпера.
В третьих: в предложенной технологии описан механизм поправки марки на (дисплее компьютера!), на состоянии окружающей среды. Но система не использует ни оборудование, ни технологии, которые данные поправки автоматически вносят в настройку оптического прицела, которым пользуется снайпер. То есть система знает о новых настройках, и соответственно им определяет «эталонное» положение прицела (картинки), это видит и знает оператор, но сам снайпер об этом не знает, ибо ориентируется в целенаведении на устаревшие настройки оптического прицела, значит, идеальное положение не будет достигнуто.
В четвертых: в технологии срабатывания наблюдается логическая ошибка ведущая к отказу оборудования: если при нажатии на курок снайпером, компьютер не отсылает разрешительную команду а ждет (эталонной) картинки цели, но цель пропала (например, исчезла из вида вообще), система становится заблокированной, так как разблокировка системы от старой цели, и настройка системы на новую цель, возможна только после реального выстрела по ранее запрограммированной цели.
Не пояснено как, и по каким принципам формируются «эталонные данные» цели, ибо в рамках предложенной концепции это может быть невозможным.
Известны: «комплекс автоматического оружия»: RU 2384809 С1, Заявка: 2008128210/02, 10.07.2008
Комплекс автоматического оружия, содержащий станок с подвижной и неподвижной частями, постель для оружия и приводы горизонтального и вертикального наведения.
Абсолютно никак не предложены ни оптика, ни иные механизмы расчета целенаведения, ни механизмы управления механикой, ни какое либо другое сопутствующее оборудование, ни способы и технология целенаведения. Не предложены средства броне защиты и маскировки. Предложенный вариант крепления станка на основе, типа «сошки» крайне неустойчив, что приведет к постоянным сбоям настроек целенаведения, при отдачи собственных выстрелов, или при попадании в корпус пуль противника.
Известны: «система управления огнем нескольких снайперов» RU 2498191 С1, Заявка: 2012111374/12, 05.04.2011
Система включает в себя несколько индивидуальных комплектов снайпера, комплект мобильного ретранслятора и комплект мобильного центрального поста. Каждый индивидуальный комплект, кроме прочего, состоит из датчика готовности снайпера, миниатюрная видеокамера с управляемым трансфокатором, устройство дистанционной активации бойка. По второму варианту оборудование центрального поста автоматически дистанционно управляет настройками прицела каждого индивидуального комплекта в соответствии с изменениями внешних условий. Техническим результатом изобретения является повышение точности поражения целей, синхронное поражение нескольких целей с различных огневых рубежей.
Главным минусом остается участие в качестве снайпера человека, со всеми вытекающими негативными обстоятельствами «человеческого фактора».
Для расчета поправок обязательно необходимо точное направление выстрела относительно азимута, и точный угол цели. Но орудие наводится на цель вручную, и ничего определяющего направление в пространстве, включая гироскоп, не используется. Заявленное оборудование не обладает способностью зафиксировать направления, таким образом невозможно рассчитать поправки на ветер и угол цели (самые главные факторы) что делает последующие расчеты на поправки целенаведения бесполезными.
Цель использования «дистанционной активации бойка», для синхронных выстрелов понятно, но в реальных боевых условиях, для дальних расстояний, достичь заявленной цели крайне сложно, ибо необходимо, чтобы в одно мгновение, все люди-снайпера «поймали» идеальное целенаправленнее, на относительно продолжительный промежуток времени, но для нескольких снайперов, особенно в ситуации, когда цели подвижны, это почти невозможно. Отклонение от требуемого идеального целенаведение хотя бы одного человека, сделает выстрел всей группы невозможным или непродуктивным. А если принять во внимание что человеческими усилиями поймать движущуюся цель на идеальное направление удается только на краткий момент времени (снайпер «одиночка» именно в это момент наживает на курок), условия участия нескольких людей, делает возможность выполнения данного задания, почти нереальной. Подобную цель может выполнить только автоматика. Не понятно как опертор(ы) определяет достоверность готовности снайпера к выстрелу.
Известны: «Система автоматизированного управления огневыми средствами противовоздушной обороны» RU 2218598 С2, Заявка: 2001128186/09, 19.10.2001.
Создание высокопроизводительной системы автоматизированного управления огневыми средствами противовоздушной обороны, обеспечивающей максимальную оперативность обмена информацией в интересах повышения эффективности огневых средств противовоздушной обороны.
И «способ управления вооружением зенитного ракетно-пушечного комплекса» RU 2506523 С1, Заявка: 2012133163/28, 02.08.2012
…Способ управления вооружением зенитного ракетно-пушечного комплекса, установленного во вращающейся относительно вертикальной оси башне его корпуса, включающий обнаружение и опознавание цели, принятие решения на стрельбу и вычисление координат упрежденной точки для стрельбы ракетным и пушечным вооружением, наведение ракетного вооружения и стрельбу ракетой или ракетами, оценку результатов стрельбы и принятие решения на продолжение стрельбы.
Системы разработана для огневых средств противовоздушной обороны, огнем реактивной артиллерии, зенитными ракетными подразделениями.
Известны: «Способ ведения боевых действий, система дистанционного управления стрельбой и дистанционно-управляемое стрелковое оружие» RU 2005127 00 А, Заявка: 2005127400/02, 31.08.2005.
Представляет собой: использование стрелкового оружия, с приводом вертикального и горизонтального перемещения, с приводом спускового механизма, с видеокамерой и лазерным целеуказателем, причем управление прицеливанием и приведение в действие спускового механизма осуществляют дистанционно с применением, компьютера (соединенного каналом связи через управляющее приемно-передающее устройство с элементами стрелкового оружия) и изображения, полученного с видеокамеры на экране монитора, и с помощью устройство управления, например "джойстик".
К недостаткам данного способа можно отнести абсолютное отсутствие любых способов и механизмов расчета и использования любых поправок расчета баллистики. Так как камера соединена с корпусом оружия неподвижно, данное оружие может стрелять результативно только «В УПОР», при ненужности поправок на баллистику, что делает нецелесообразным его использование.
Также не используются средства броневой и маскировочной защиты, что делает оборудование, не спрятанное и неспособное к прицельной стрельбе, крайне уязвимым.
Также использование устройства управления тапа джойстик для управления приводами перемещения оружия, крайне малоэффективны, особенно для мелких (на мониторе) целей, тем боле для движущихся целей
В примере полностью отсутствует программное обеспечение способного делать (точно и быстро) необходимые баллистические расчеты для целенаведения, и производить необходимые команды для управления приводами перемещения орудия в плоскостях, что делает сам факт использования компьютера крайне нецелесообразным, с крайне низким КПД.
Наиболее близкий аналог (прототип): Способ дистанционного управления ведением снайперского огня, РФ №2474782, Заявка: 2011130436/28, 22.07.2011
Описание особенностей и недостатков предложенного решения.
Изобретение относится к дистанционному управлению автоматической стрелковой установкой. Включает генерацию информации о цели видеосистемой, последующую ее передачу к системе управления (оператором!) одной или нескольким автоматическим стрелковым установкам, и дальнейшую ее обработку (оператором!) с помощью программного обеспечения с целью последующей передачи корректирующих параметров непосредственно на одну или несколько стрелковых установок для совершения точного выстрела в цель по команде стрелка-оператора. При этом (именно оператор!) вводят начальные параметры для расчета баллистических поправок в искомое расстояние до цели. Информации о цели передаваемая к системе управления оператором обрабатывается хоть и с помощью программы, но именно самим оператором, собственноручно!, с целью последующей передачи корректирующих параметров непосредственно на стрелковые установки., отличающийся тем, что (именно оператор, собственноручно!) вводит необходимые начальные параметры для расчета необходимых баллистических поправок.
Расстояние до цели определяют, в том числе, с помощью с видеокамеры путем получения с нее изображений с ориентирами, до которых дальность уже известна, визирные оси которых выполняют параллельно оси со стволом стрелковой установки, (что требует непосредственного, собственноручного участия в процессе зрения оператора, и его мысленной обработки и анализа зрительных образов, к тому же в данной технологии предлагается определить расстояние на основании фокусного расстояния оптики, но человеческое зрение не способно различить разницу в резкости изображений, настолько четко, чтобы можно было сделать адекватные выводы о расстояниях!) Что является «мощным человеческим фактором». Точность подобной технологии вычисления расстояния крайне мала, приравнивается к вычислению расстояния «на глазок», что для работы снайпера непозволительно.
При этом, заступая на дежурство, оператор (собственноручно!) через специальные таблицы вводит в программное обеспечение начальные параметры: время суток, направление и скорость ветра, влажность, температуру воздуха и почвы, атмосферное давление, корректируемые в автоматическом режиме с помощью альтиметра, барометра и термометра, высоту над уровнем моря, параметры установки и снаряжение патронов, параметры, направление и скорость движения цели, расстояние до цели. Не понятно, и не объясняется зачем вводить, в начале смены, данные окружающей среды, которые меняются автоматически. Не понятно, и не объясняется, зачем усилиями самого оператора, в начале смены, вводить параметры, направление и скорость цели, а также расстояние до нее, если направление и скорость движения целей постоянно меняете, и предусмотреть эти изменения, тем более в течении смены (дежурства) оператора невозможно!
При этом на основании введенных параметров через программное обеспечение (именно оператор лично и собственноручно) осуществляет корректировку выстрела с помощью баллистического калькулятора, который вычисляет, баллистические коэффициенты. То есть с помощью программы, но именно оператор, собственноручно, производит манипуляции по расчету коэффициентов. То есть оператор (человек) постоянно является посредником между вычислениями программы.
По предложенной технологии именно оператор собственноручно, с учетом рассчитанной коррекции, точно выставляет линию оси ствола на цель для последующего выстрела. Оператор (собственноручно) задает параметры цели (грудная мишень, бегущий человек, мотоциклист, парашютист и т.д.), а также примерную скорость и направление движения. Непонятно откуда берется эта информация и как она влияет на последующий процесс.
Оператор, используя встроенный лазерный дальномер, вводит в программу один из основных параметров - расстояние до цели (если ввод расстояния предполагает ввод в таблицу каких-то значений, то с момента замера расстояний, до момента ввода цифр проходит какое-то время, что автоматически делает значения устаревшими, а значит последующие вычисления неточными). При отсутствии в установке лазерного дальномера оператор может и с помощью видеокамеры определить расстояние до цели. Для этого на первой половине экрана монитора, отображающей картинку видеокамеры, определяется цель, а затем при помощи джойстика или «мышки» отмечается ее примерное расположение на карте данной местности, отображенной на второй половине монитора.
Во-первых, не зная реального размера цели, а также факт, что ее положение на карте будет «примерным», делает всю данная процедуру вычисления расстояния бессмысленной, ибо итоговые данные будут неверными.
Во вторых, в реальных боевых условиях, предложенный (длительный, трудоемкий) способ ручного определения расстояния до цели делает невозможным работу по движущейся цели, ибо к моменту окончания расчетов, и ввода данных в таблицу, данные устаревают.
Из описания процедуры непонятно кто именно производит повороты орудия, в вертикальной и горизонтальной плоскостях, оператор или программа. Если оператор с помощью компьютера, то неизбежны ошибки.
В предложенном решении видеосистема только одна, что для пересеченных местностей, и/или задач с большим количеством целей, крайне недостаточно
Не смотря на то, что (по словам автора решения) эти манипуляции не требуют от оператора умений и навыков именно снайпера, и относительно просты, само участие в данном процессе человека, очень сильно затормаживает процесс, и вносит негативный человеческий фактор.
Не понятно и не объяснено как могут вноситься поправки в целенаведение, на далекие цели, если видеосистема соединена с орудием жестко (фиг 3), Ведь факт поправок на баллистику предполагает что продольная ось оптики, не совпадает с продольной осью ствола орудия, и чем дальше цель и чем сильнее боковой ветер, тем более будет это несовпадение.
По инструкции: при ведении огня по движущимся и воздушным целям. Оператор наводит видеокамеру на цель и фиксирует ее координаты в программе, затем через некоторый промежуток времени вновь наводит видеокамеру на цель и также автоматически фиксирует новые координаты. По введенным в программу координатам и разности временных параметров при фиксировании цели компьютер рассчитывает траекторию движения и наводит стрелковую установку на цель с учетом упреждения и коррекции баллистики, и производит выстрел через вычисленный программой интервал времени.
Во первых: если имеется в виду наведение на цель курсором, ставя точку оператор человек может промахнуться, при далеких расстояниях до цели, промах клика в пиксель, дает ошибку ведущую к промаху выстрела. Также не понятно, в какую часть тела ставить курсор.
Во вторых: не понятно, что означает процесс (фиксирование координатой в программе), если необходимо усилиями оператора, вводить какие-то цифры в какие-то поля, процесс сразу же обречен на неудачу, ибо момент клика по объекту, отделен от момента ввода координат, т.е. на момент ввода координат, объект успеет отойти от точки клика курсора, координаты будут устаревшими, расчеты автоматически будут ошибочными.
В третьих: цель как при первом клике так и при втором имеет объем (площадь), даже если курсор наведен на цель, но при первом и втором клике выбраны разные точки поверхности одной цели, программа рассчитает критически ошибочные параметры траектории, что приведет к промаху, тем боле что кликать предстоит по движущемуся и относительно мелкому объекту, и по меркам человеческого зрения, субъективно не значимый промах в клике, приведет к гарантированно неправильным расчетам.
В четвертых: клик курсором по монитору в область цели не даст системе точные координаты цели, а дает только относительно точное направление к цели. Чтобы система получила относительно точные координаты, необходимо чтобы оператор сделал принципиально одновременные клики на принципиально конкретную точку цели, представленную принципиально одновременно на двух принципиально разных, разнесенных друг от друга камерах, то есть двух разных мониторах, двумя разными манипуляторами (мышками), двумя разными руками. Только сопоставив направления с двух камер, система сможет теоретически рассчитать координаты. Ни предложенная технологи, ни возможности человека, В РЕАЛЬНОСТИ ни способны произвести такую манипуляцию.
В пятых: принимая во внимание, что большинство целей в боевых условиях движутся не прямолинейно и не с одинаковой скоростью, подобный примитивный способ расчета траектории по двум точкам, вообще лишен смысла, ибо по двум координатам и времени, тем более вводимых вручную, в принципе невозможно предсказать траекторию цели.
Предложенная технология не только не проработана практически, она и не продумана теоретически.
Система, состоящая из одного или нескольких огневых орудий работает только с одним оператором. Если целей в боевом задании более одной, и они движутся, один опрератор-стрелок не сможет справиться с заданием, тем более что цель может быть закомуфлировано и двигаться скрытно.
Для боевых задач с наличием нескольких целей, необходимо относительно много видеокамер, и участие относительно большого количества людей (специалистов, порой в разных отраслях). На каждую огневую точку нужен как минимум один оператор, в идеале два, чтобы в то время как один работал с настройками, другой визуально контролировал движения на поле боя, в поле видимости данной камеры. Предусмотрена только одна панель управления, один оператор, невозможность привлечь специалистов находящихся удаленно, даже невозможно привлечь помощников оператора, находящихся рядом с оператором.
Совершенно не показано, каким образом оборудование фиксирует угол цели. Не предусмотрел механизм отцентровки оборудования, не используются гирокомпасы. Предложенный набор оборудования и технология неспособны вычислить угол цели.
Предложенный принцип сравнивания стоп-кадров с целью поиска движения нереален, система будет реагировать на любое движение в пространстве, и произойдет то самое «замыливание» на сигналы системы, которое отрицает автор.
Автор указывает на отсутствие в проекте (негативного) человеческого фактора, в части профессиональных качеств снайпера, но на самом деле, на оператора данного приспособления, полагается много действий, на выполнение которых влияет человеческий фактор, более того, предложенные алгоритмы действий оператора, сводят к минимуму качество выстрела, по целям которые движутся непрямолинейно и не равномерно, в следствии чего систему вообще невозможно сориентировать. Большую роль в корректировках и настройках играет сам человек, что сильно замедляет процесс, и не исключает ошибку оператора, более того принцип и алгоритм манипуляций, делает информацию по подвижным объектам устаревшей, а значит расчеты ошибочными. Таким примитивным способом расчетов невозможно работать по нескольким целям, с нескольких орудий. Принимая во внимание, что оператор один, на один и более огневых расчетов, на неизвестное количество целей, огневые расчеты не будут при таком принципе использования использоваться с адекватным КПД (будут простаивать).
Выстрел производится только по команде оператора (человека), система не способна функционировать автоматически.
В условиях реального боя, предложенный вариант оборудования будет малоэффективным.
Целью заявленной группы изобретений является создание высокопроизводительной системы автоматизированного управления огневыми средствами, обеспечивающей максимальную оперативность обмена информацией в интересах повышения эффективности огневых средств в условиях ведения боя. Система строится по принципу: «все, что может быть сделано машиной, должно быть сделано машиной». Участие человека минимизируется. Что увеличивает скорость, точность, и уменьшает количество ошибок.
Это достигается тем, что изобретением реализуется:
1) повышение точности и скорости поражения цели и/или целей, для реализации чего используется:
а) Специально спроектированные, и особым образом установленные автоматические стрелковых систем (огневые позиции), имеющие точную оптическую систему наведения.
б) Системы видеонаблюдения, распознающие и сопровождающие цели разных ракурсов, с помощью которой вычисляется точное направление и точное расстояние до любой цели, точное направление и скорость движения любой цели, в любой момент времени, от любой огневой позиции. При необходимости используются дроны, спутники.
… в) Лазерные установки для целеуказания и определения расстояний. Использование технологий вне видимого спектра, позволяющие качественно отрабатывать цели в условиях ограниченной видимости.
…г) Диагностическое оборудование измеряющее параметры окружающей среды, и в режиме реального времени передающее в центр управления.
д) Специальное программное обеспечение, постоянно (в режиме реального времени) собирающую всю информацию с систем видеонаблюдения, с диагностических датчиков параметров окружающей среды, постоянно контролироющее расположение всех целей, все направления и все расстояния от всех огневых позиций до всех целей, постоянно расчитывающая и хранящая в памяти, в актуальном состоянии, все необходимые баллистические характеристики всех боеприпасов планируемых к использованию, со всех огневых позиций, для всех целей. Причем цели находятся системой самостоятельно, по ранее заданному алгоритму, или выбираются оператором простым кликом.
е) Возможность привлечение к процессу большого количества операторов специалистов удаленным образом.
ж) Могут использоваться разные типы боеприпасов.
2) Камуфляж и броневая защита оборудования.
а) Огневые расчеты и системы видеонаблюдения, защищены бронированным колпаком, форма и цвет которых отвечают целям камуфлированные.
б) Наряду с реальными огневыми расчетами используются «имитаторы огневого расчета» функционирование которых подчиняется системе. Их цель: отвлечение внимания от реальных огневых расчетов, и противодействие акустической системе обнаружения снайпера
в) кроме выполнения основной боевой задачи, огневые расчеты запрограммированы на защиту друг друга, имитаторов, и элементов диагностического оборудования.
3) техническая и программная возможность ведения боя в автоматическом режиме. Предварительно алгоритм, задачи и цели боя задаются оператором.
Раскрытие сущности изобретения:
Группа изобретений: Автоматизированный боевой комплекс, способ целенаведения огневого расчета, способ ведения боя в автоматизированном и автоматическом режимах.
Боевой комплекс: комплекс механизмов, оборудования, систем, приспособлений, приборов, работающих автоматизировано и автоматически, функционально соединенных воедино, целью функционирования которых является выполнение боевых задач. Программирование контроль и управление комплексом может происходить удаленно.
В зависимости от задачи, целей и обстоятельств принцип комплектации системы и ее подготовки может быть разный, ниже описан стандартный вариант комплектации подготовки и ведения боя.
1. Комплектование боевого комплекса (фиг)
1.1. Огневой расчет «ОР» (оборудование, фигура), набор оборудования систем и механизмов выполняющие совместно функцию по реализации собственно огневой стрельбы, далее «огневой расчет». Огневой расчет состоит из:
а) Стрелковый элемент, собственно огневое орудие, оно же и далее «орудие», который выполняет функцию стрельбы боеприпасами.
б) оптическая система наведения, аналог оптического прицела, далее «оптика орудия», …в) система рам и направляющих, далее «станок» на который крепится орудие
г) Механизм перезарядки, он же «магазин», он же «картридж боеприпасов», далее «картридж»
д) локальный блок управления, с элементами проводной и беспроводной связи с центральным блоком управления и другими элементами комплекса
е) броневой каркас, он же элемент камуфляжа
ж) система энергообеспечения
з) элементы комуфлирования (маскировки) огневого расчета: управляемая дымовая завеса
Один боевой комплекс может быть оборудован несколькими огневыми расчетами, но все огневые расчеты объединяются управлением из одного центра управления. Тем не менее, все огневые расчеты имеют собственный (локальный) центр управления который позволяет функционировать в автоматическом (независимом) режиме, при потере связи с главным центром.
Огневые расчеты изготавливаются (собираются) в заводских условиях, на место выполнения задач вывозятся в готовом, или частично разобранном виде. И станок и бронебойный каркас имеют собственные, автоматизированные элементы ориентации в пространстве, и жесткого фиксирования к грунту.
Огневые расчеты, по возможности, устанавливаются таким образом, чтобы иметь возможность, кроме выполнения основной боевой задачи, защищать себя, друг друга, «имитатора» и диагностическое оборудование.
1.1.1 Орудие (Стрелковый элемент). Это именно та составляющая огневого расчета, которая стреляет боеприпасами. Аналогично: снайперской винтовке, гранатомету, миномету, ракете и т.д. Один огневой расчет может комплектоваться одновременно разными типами орудия, или каждый тип орудия оборудуется как отдельный огневой расчет. Одно орудие может комплектоваться двумя и более стволами (многоствольное орудие), для боеприпасов разного калибра, или для автоматической замене при перегреве, или для замене для автоматической чистки ствола, или для автоматической замене при заклинивании. При выборе боеприпаса другого калибра или другого назначения (трассирующие, бронебойные, зажигательные и т.д.), система автоматически и мгновенно делает поправку для целенаведения с учетом другой баллистики выбранных патронов. Орудие имеет элемент проверки и уточнения ориентации (уровень) в пространстве, в случае если из-за перегрузок, землетрясений (близкий взрыв) или проседания грунта произошел сдвиг ориентации в системе координат, уровень фиксирует сдвиг, и дает команду подвижной системе станка отцентрировать положение орудия. Орудие с целью визуального охвата (визуального контроля) зоны боевой задачи, и целенаведения может ориентироваться в любых горизонтальных и вертикальных направлениях.
1.1.2. Оптика орудия, выполняет функцию оптического прицела. Представляет собой видеокамеру с цифровым выходом, автодиафрагмой, автофокусом и управляемым трансфокатором.
По одному из вариантов реализации, оптика регулируемо-подвижно прикреплена к орудию. В этом случае все поправки целенаведения реализуются через двигательные приводы, изменяющие направление оси оптики, относительно оси ствола орудия.
По второму варианту реализации, корпус оптики соединен неподвижно (монолитно) с корпусом орудия, но, внутренние оптические элементы оптического прицела (линзы, призьмы и зеркала) посредством специальных приводов имеют возможность двигаться, изменяя ось луча по которому происходит прицеливание, в нужном направлении. При этом ось луча прицеливания отклоняется от оси орудия также как и в первом варианте реализации отклонялась ось всей оптики. В этом случае орудие о оптика изготавливаются воедино (монолитно) и не отделимы друг от друга.
Камера оптики высокого разрешения, переменного угла обзора, причем в режиме стрельбы, камера регулирует узкий угол обзора, ориентированный на цель с высоким разрешением, а в режиме ожидания и наблюдения, камера регулирует широкий угол обзора, для наблюдения за большим пространством боевой задачи, с центром на цели, и для наблюдения за разными целями, частично выполняя ту же самую функцию, что и система видеонаблюдения. Оптика орудия участвует в видео-фиксации поля боя вместе с другими системами видеонаблюдения.
Каждое орудие, в комплекте с оптикой имеют лазерный целеуказатель, и лазерный определитель расстояния. К одному орудию может быть приложено несколько оптических и неоптических систем целенаведения, которые работают в разных спектрах излучения в том числе ПК, УФ, прицелы ночного видения, ультразвук и т.д., дублируя друг друга.
Система видеонаблюдения формируется и работает таким образом, что позволяет функционировать огневому расчету даже при потере некоторых элементов системы видеонаблюдения. И даже если выходят из строя абсолютно все элементы наведения, в том числе собственная оптика орудия. Огонь ведется по координатам, ранее сохраненным в системе (ранее выбранные точки цели на неподвижных объектах).
1.1.3. Орудие жестко фиксировано, установлено на «станок» (система рам и направляющих). Станок с помощью электрических и электрогидравлических приводов вертикального и горизонтального наведения, ориентирует орудие и оптику орудия. Станина станка и подвижные механизмы ориентации орудия гарантированно устойчивы к перегрузками связанным с отдачей при стрельбе, и вибрациями связанными с перезарядкой. Станок жестко (монолитно) фиксирован к грунту (гусеничной базе), способ фиксирования станка гарантирует устойчивость системы к любым нагрузкам. Движение (привод) станка, направляющего орудие, и оптики, подчиняются автоматизировано действиям оператора (удаленно) или автоматически согласно заданной программе ведения боя. В случае близкого взрыва, если станок не иннициированно меняет положение в пространстве (что приведет к сдвигу орудия), система автоматически перенастраивается и отцентровывается по новым координатам опорных элементов станка. Оптика орудия автоматически-подвижна соединена с орудием, автоматика настройки оптики подчиняется командам с панели управления и программы. Для точной ориентации в пространстве орудия используется специальное оборудование, в том числе гироскоп.
Орудие огневого расчета не соприкасается броневым колпаком. Орудие на станке и броневой колпак крепятся к грунту отдельными элементами крепления. Таким образом вибрации броневой защиты не передаются орудию, в целях снижения помех в процессе целенаведения.
1.1.4. Картридж боеприпасов. Предназначен для хранение боеприпасов и автоматической подачи боеприпасов в орудие. Если орудие в процессе боевого задания использует только один вид боеприпасов, используется «одновидный картридж», он содержит только один вид боеприпасов. Если орудие в процессе боевого задания использует несколько разных видов боеприпасов, используется «многовидный картридж», он содержит несколько разных ячеек, в которых хранятся разные виды боеприпасов. Работа картриджа контролируется программой, выбор вида боеприпаса подчиняется автоматизировано действию оператора, или автоматически программой боя. Механизм картриджа может быть модернизирован дополнительным механизмом дозарядки картриджа, для планирования длительного боя, требующего большое количество боеприпасов.
1.1.5. Локальный блок управления (ЛБУ), аналог системного блока компьютера, устойчивый к механическим повреждениям, управляет всей механикой огневого расчета, проводным и/или беспроводным способом соединяет огневой расчет с центральным блоком управления (через него с пультом управления оператора), и с системой видеонаблюдения и диагностическим оборудованием напрямую. Когда огневой расчет связан с центральным блоком управления, его действия подчинены полностью центральному блоку управления, но если происходит разрыв связи с центром, локальный блок берет управление огневым расчетом на себя, в полностью автоматическом режиме. Для этого, на предварительных этапах настройки боевого комплекса, прописывается индивидуальная задача огневого расчета, для выполнения в автоматическом режиме, на случай отключения его от центра управления. Эта программа хранится и функционирует посредством локального блока управления.
1.1.6. Броне-защитный (камуфляжный) каркас, он же броневой каркас, он же камуфляж: система защиты огневого расчета от обнаружения и повреждения. (фиг…).
1.1.6.1 Цель данного элемента оборудования сделать огневой расчет по возможности незаметным, и максимально защищенным от поражения различными средствами боевой техники. В зависимости от места и времени года, используются разные варианты каркаса, которые могут быть замаскированы под скалу, валуны, неровности местности, элементы архитектуры, транспорт и т.д
1.1.6.2. При наличии времени и возможности подготовится, огневой расчет может быть вкопан в землю. При невозможности подготовиться огневые расчеты могут устанавливаться на землю, или монтироваться на самоходных гусеничных платформах.
1.1.6.3. Как правило, гнезда (отверстия в каркасе) для орудия с оптикой, могут автоматизировано открываться и закрываться, с целью комуфрирования и защиты от попадания пуль. Открывается гнезда только на момент уточняющего наведения орудия собственной оптикой и выстрела (предварительное наведение происходит, при закрытом гнезде, на координаты с центра управления, без визуального контакта оптики орудия с целью).
Когда огневой расчет еще не демаскирован, гнездо открыто, чтобы собственная оптика орудия постоянно участвовала в подготовке и ведении боя. Но когда огневой расчет уже демаскирован, в момент, когда система не стреляет, но готовится к стрельбе, она полностью закрыта броней, тоесть гнездо наглухо закрыто броневой створкой, которая открывается только перед выстрелом. Предварительное наведение системой орудия на цель происходит «в слепую», по координатам которые передаются в систему от системы видеонаблюдения, еще до открытия брони, причем данные координаты уже скорректированы по расстоянию до цели, поправкам на движение цели, ветру и иным факторам. После открытия створки гнезда, за доли секунды уточняется целенаведение собственной оптикой орудия, и производится выстрел, уточняющее наведение по собственной оптике (1-2 секунды) и выстрел. Если выстрелы одиночные после выстрела закрытие броней.
Механика броневых створок открывающих отверстие, устроены таким образом, что позволяют орудию ориентироваться в любых направлениях, в то же время гарантированно закрывают броней внутреннее пространство огневого расчета от выстрелов противника.
1.1.6.4. Для целей маскировки огневого расчета используется дымовая завеса (активные элементы камуфляжа), для этого с разных сторон от огневого расчета вкапываются домовые шашки, с автоматизированным принципом включения, выключения, они могут быть замаскированы под горящие покрышки. В зависимости от направления ветра включается нужная дымовая шашка, дым закрывает огневой расчет с гнездом, сводя к минимуму угрозу попадания в гнездо выстрела врага. При этом целенаведение огневого расчета происходит за счет системы видеонаблюдения, которая не комуфлируется дымом и контролирует поле боя.
1.1.6.5. Для решения задач в городских условиях, например в антитеррористических операциях, огневой расчет может камуфлироваться под предмет являющимся естественным для города, например автомобиль, мотороллер, корзина с продуктами, чемодан, картонная коробка, элементы заграждения, и пр. Колесо-содержащие предметы одновременно является и средством доставки огневого расчета на позицию. Созданные определенным способом огневые расчеты могул быть временно встроены в такие транспортные средства как автобусы, троллейбусы, трамваи и пр. Элементы одежды, формы, снаряжения могут выполнять функцию камер наблюдения системы, например сумка, дубинка, фуражка, кобура, пистолет и пр..
1.1.6.6. Отдельной разновидностью огневого расчета является огневой расчет монтированный на бронебойном самоходной гусеничной платформе (мобильный, бронебойный огневой расчет (МБОР) фиг). Данный вид оборудования по возможности маскируется, и максимально бронезащитен. Используется в боевой задаче, в том числе с целью отвлечения внимания противника от замаскированных огневых расчетов, и в ситуациях когда крайне необходимо менять место дислокации огневого расчета, в том числе выдвигаться в места, труднодоступные с других ракурсов. Сами имеют полную боевую экипировку, различные виды вооружения, в том числе гранатометы и ракеты. Вводятся в боевую задачу, как правило после того, как видеосистемой будет произведена разведка местности, и замаскированными огневыми расчетами будет гарантироваться защита подвижной гусеничной платформы от гранатометов противника. МБОР соединены беспроводным способом, в общую систему управления. В связи с подвижностью, данный расчет оборудован специфическими способами ориентации в пространстве, с помощью технологий гироскопов и ГЛОНАСС.
1.1.7. Система энергообеспечения. Все подвижные элементы огневого расчета и блок управления работают на электричестве. Электропитание к огневому расчету подведено кабелем. Кроме этого в системе есть аккумуляторы на случай прерывания электропитания от кабеля. Кроме этого есть аварийный электрогенератор, который автоматически начинает работать при потребности в электричестве. Технологи изготовления и принципы размещения генератора отвечают требованиям максимальной маскировки.
1.1.8. Активные элементы камуфляжа (маскировки) огневого расчета. Как вариант: активные дымовые шашки, размещенные с разных сторон от огневого расчета, включаются и выключаются автоматизировано по сигналу оператора, или автоматически согласно заданной программе. В тот момент, когда огневой расчет уже обнаружен и ведется прицельная стрельба по нему, принципиально важно в момент открытия гнезда, свести к минимуму угрозу попадание выстрела через гнездо внутрь огневого расчета. Для этого к моменту открытия гнезда для выстрела данная область задымляется, при этом целенаведение орудия происходит по тепло-визионному прицелу орудия, и координатам системы видеонаблюдения, элементы которой не задымляются и четко фиксируют пространство боевой задачи. Кроме дымовой технологии, гнездо расчета может камуфлироваться пучком травы, стволом дерева, веткой с листвой, и т.д.
1.2. Имитатор огневого расчета (ИОР), далее «имитатор» или ИОР. Внешне похож на огневой расчет. Функционально предназначен для того, чтобы «относительно заметно» имитировать выстрелы. В имитаторе установлены: визуальный имитатор имитирующий огонек выстрелов; звуковой имитатор имитирующий звук выстрелов; может быть установлен имитатор дыма (пара) имитирующий выход пороховых газов или дыхание снайпера. Допускается использование имитаторов не закрытых броней, в этом случае используются относительно подвижные макеты фигур снайперского расчета. Имитатор проводной или беспроводной связью соединен с центральным блоком управления и с огневыми расчетами.
В зависимости от обстоятельств, если скрыть выстрел невозможно, за доли секунды до выстрела основным орудием, система включает имитирование выстрела на имитаторе. Звук и свет имитатора немного сильнее звука и света основного огневого расчета, с целью переместить внимание противника на имитатор. На период ведения (скрытой фазы) боя, когда деятельность огневой позиции еще не выявлена, при возможности использования бесшумных выстрелов, и в дневное (светлое и шумное) время суток, имитаторы готовы, но не используются. Имитаторы начинают использоваться, когда бой из скрытой фазы переходит в открытую.
Если прекращается связь имитатора с центральным управлением, но не прекращается связь с огневым расчетом, локальный блок управления огневого расчета управляет деятельностью имитатора, маскируя собственные выстрелы. Если имитатор теряет связь со всеми элементами боевого комплекса, он начинает работать самостоятельно, по заранее заданной, для подобных случаев, программе. Для этой цели у имитатора есть собственный блок управления.
Имитатор огневого расчета активно используется в процессе противодействие акустическим системам обнаружения позиции снайпера. Наличие нескольких синхронных сверхзвуковых волн и нескольких акустических фронтов создает невозможность их временного сопоставления и последующего математического анализа данных.
1.3. Системы видеонаблюдения он же наземный расчет видеонаблюдения (НРВ). Максимально закамуфлированные камеры, с цифровым выходом, автодиафрагмой, автофокусом и управляемым трансфокатором, автоматизировано и автоматически подвижные (приводы для движений во всех направлениях), имеющие возможность фиксировать и измерять расстояния линейные и угловые в разных, видимых и невидимых спектрах, для чего используются совместно разные типы оборудования, для визуального и не визуального контроля в разных спектрах видимого и невидимого излучений.. В систему встроены лазерные определители расстояния и направления. Количество камер определяется в зависимости от возможностей и целесообразности. Места монтирования камер, и их количество, определяются особенностями местности и боевой задачи. Все системы видеонаблюдения соединены проводным и беспроводным способом в центральном блоке управления. На ряду с монокулярными системами видеонаблюдения, могут использоваться бинокулярные видеосистемы, позволяющие точнее определить направления и расстояния.
1.3.1. Системой видеонаблюдения используются все доступные, по последнему уровню техники, виды излучения, в том числе: весь видимый спектр; ИК; УФ; сопряжение с системой ночного видения; системы подцветки для ночного видения; датчики фиксирующие источники электромагнитного излучения, в том числе электрооборудования, в том числе сотовых телефонов; датчики поиска активных систем ночного видения (противника). Тепловизионный прицел используется не только для целенаведения ночью, но и для целенаведения через дымовую завесу. Каждая система видеонаблюдения, в комплекте с оптикой имеют лазерный целеуказатель, и лазерный определитель расстояния
1.3.2. Цели системы видеонаблюдения: а) построение виртуальной ЗД карты местности (ландшафт), в том числе определение всех актуальных расстояний и углов; б) отцентровка всех элементов боевого комплекса; в) поиск цели; г) распознание цели; д) захват цели; е) сопровождение цели; ж) участие в предварительной (грубой) наводке орудия на цель, путем передачи точных координат цели огневому расчету.
1.3.3. В реализации задач системы видеонаблюдения участвует и собственная оптика орудия, в том случае если это не угрожает безопасности самого огневого расчета.
1.3.4. Система фиксирует, распознает, запоминает и докладывает оператору все факты фиксирования активности, движения (в любом диапазоне), на основании чего создается карта активности, что используется при планировании и реализации боя.
1.3.5. Оборудование видеоконтроля могут быть установлены не только на земле, но и на иных объектах, здания, деревьях, ЛЭП. Устанавливаться могут предварительно вручную, или с помощью дронов, или с помощью специально обученных собак. Система видеонаблюдения может быть установлена на дроне в состоянии полета. При возможности и целесообразности может быть использовано система видеонаблюдения со спутника.
1.3.6. Оборудование системы видеонаблюдения изготавливается максимально незаметным, камуфлируется максимально качественно, используются средства броневой защиты.
1.3.7. Оборудование и датчики вычисления расстояний (в том числе лазерные технологии): а) встроены в систему оптического наведения стрелковых систем, б) встроены в оборудование систем видеонаблюдения, в) расстояние также вычисляется системой математически соответственно угловым показателям направления на цель с разных камер, г)при возможности и целесообразности используется привязка к спутниковой навигации, уточненное глонасс (GPS)
1.3.8. При возможности и целесообразности к системе может быть подключено визуальное фото и видео сканирование местности со спутника, с дронов, или иных беспилотных летательных объектов «разведчиков».
1.4. Определители направления и силы ветра, они же «датчик ветра», они же и далее «ветрометры»: разновидность диагностического оборудования, оборудование, ежесекундно фиксирующее направление и силу ветра, проводным или беспроводным способом передающий информацию в центр управления, в режиме реального времени. На основании данной информации, центр управление делает поправки на ветер при целенаведении. Ветрометры имеют также прямую связь с огневым расчетом, если пропадает связь огневого расчета с центром управления, и огневой расчет начинает выполнять автоматическую программу по ведению боя, локальный центр управления использует параметры ветрометра для коррекции целенаведения по ветру.
1.4.1. На случай нарушения связи с ветрометром, и если это возможно, используются естественные маркеры ветра, подвижные элементы ландшафта, типа деревья, падающие листья, провода, траву. Программируется примерное определение ветра по элементам ландшафта. Это используется только в том случае, если у огневого расчета прерывается связь не только с центром управления, но и с ветрометрами.
1.4.2. Ветрометров может быть установлено несколько штук. Они максимально замаскированы. Они могут быть установлены не только на земле, но и (в зависимости от механизма работы) на иных объектах, здания, деревьях, ЛЭП. Устанавливаться могут предварительно вручную, или с помощью заброса, или с помощью дронов, или с помощью специально обученных собак. При возможности и целесообразности может быть использованы показатели из службы гидрометцентра.
1.5. Иные диагностические датчики, они же диагностическое оборудование (ДО), имеют проводную и/или беспроводную связь с центром управления и с огневым расчетом.
1.5.1. В режиме реального времени подают информацию показателей в центр управления, на основании которых программа делает поправки на целенаведение. В случае если связь огневого расчета с центром нарушена, данные передаются напрямую в огневой расчет, локальный блок управления которого делает все необходимые поправки на целенаведение.
1.5.2. Выделяют следующее диагностическое оборудование:
1.5.2.1. измеритель атмосферного давления
1.5.2.2. измеритель влажности
1.5.2.3. измеритель температуры
1.5.3. В зависимости от обстоятельств, данные датчики могут быть совмещены в одном оборудовании. Их может быть установлено несколько штук. Они могут быть установлены не только на земле, но и (в зависимости от механизма работы) на иных объектах, здания, деревьях, ЛЭП. Устанавливаться могут предварительно вручную, или с помощью заброса, или с помощью дрона, или с помощью специально обученных собак. При возможности и целесообразности может быть использованы показатели из службы гидрометцентра. Принимается во внимание что параметры на земле, или у земли, могут отличаться от параметров над землей.
1.6. Центральный блок управления (ЦБУ): на базе системного блока компьютера, пригодного для работы в полевых условиях. Проводным и/или беспроводным способом центральный блок управления соединен со всеми элементами боевого комплекса. Содержит в себе аппаратные и/или программные элементы блоков суммирования, баллистических вычислителей.
1.6.1. На центральный блок установлена специальная программа (ПО) предназначенная для работы всего боевого комплекса. Часть функционала данной программы дублируется на локальных центрах управления огневых расчетов, для функционирования механики целенаведения, и для управления функционирования боевых расчетов в автоматическом режиме.
1.6.2. функции центрального блока (ЦБУ):
а) собирает информацию со всех элементом боевого комплекса;
в) отслеживает механизм отцентровки элементов;
г) строит и записывает (сохраняет) виртуальную ЗД модель реальной местности территории боевой задачи, в режиме реального времени, в актуальном состоянии;
д) собирает параметры о расстояниях и состоянии окружающей среды, с системы видеонаблюдения и всех иных диагностических датчиков;
е) посредством пульта управления формируется боевая задача, определяются цели
ж) на локальные блоки управления огневых расчетов записываются задачи расчетов в автоматическом режиме ведения боя, на случай прерывания связи расчета с центральным блоком управлени.
з) Так как для центрального блока управления крайне важна устойчивая связь со всеми элементами боевого комплекса, он находится в относительной близости, но в укрытом положении, и на безопасном расстоянии от боя. Для связи с элементами боевого комплекса используются проводные и разные варианты беспроводных технологий. В свою очередь, центральный блок управления может наладить связь с любой точкой земного шара через спутниковые средства связи. Таким образом наблюдать за боем, и управлять боем, будет возможно с любой точки земного шара. Ограничением будет лишь качество и скорость связи.
1.7. Программное обеспечение системы (ПО). Установлено на центральном блоке управления, локальных блоках управления (огневые расчеты), панели управления оператора, удаленной панели управления оператора.
Для разного оборудования и для разных функций готовится индивидуальный интерфейс. На компьютеры, используемые как удаленное ПУ, предустанавливают програмный эллемент для ПУ. В целях возможности оперативной организации удаленной ПУ на компьютерах без предустановленной программы используется браузерный вариант интерфейса.
1.8. Панель управления оператора, она же пункт управления (ПУ). Рабочее место оператора посредством которой человек работает с системой, со всеми элементами боевого комплекса. Изначально в программное обеспечение (ПО) комплекса запрограммированы все необходимые функции, инструменты и интерфейсы. Принципиально важна качественная и скоростная связь ПУ с центральным блоком управления (ЦБУ), поэтому ПУ связано проводными и беспроводным способами с ЦБ.
Существует несколько видов панелей управления:
1.8.1. Панель управления (стационарная) (СПУ) представляет собой несколько мониторов с клавиатурой, «мышкой» и иными (манипуляторами) элементами управления. Количество мониторов и элементов управления зависит от комплектования боевого комплекса, и особенностей боевой задачи. Находится в непосредственной близости от серверов ЦБУ, имеет проводную связь. Как правило они находятся в одном помещении, на одной колесной базе. Панель управления может быть разделено на два и более, количество операторов зависит от комплектования боевого комплекса, и особенностей боевой задачи. Какие-то операторы (специалисты, инструкторы, консультанты) могут работать удаленно, через системы спутниковой связи.
1.8.2. Система (ПО) имеет возможность подключения любого колличества панелей управления на базе ноутбука, планшета, смартфона, с безпроводным способом связи. Такая панель управления называется «мобильная панель упраления» (МПУ). Для этого используются интерфейсы с упрощенным функционалом. Используется когда оператору необходимо контролировать происходящее на поле боя собственными глазами. При этом оператор с мобильным оборудованием выдвигается на поле боя, и на месте контролирует процесс, или участвует в процессе.
1.8.3. В случае если в выполнении боевой задачи принимают участие не только боевой комплекс но и люди, они могут снаряжаться МПУ типа смартфон, с определенным набором функций, используя который они могут видеть ситуацию на поле боя с наружи, использовать все системы видеонаблюдения, видеть цели контролируемые системой, при необходимости вносить коррективы в работу системы, указывать цели невидимые системе видеонаблюдения, корректировать (управлять) огонь огневых расчетов. Благодаря специальным маякам, которые фиксируются системой видеонаблюдения даже ночью, и точному положению по GPS, система распознает сотрудников как «свой», выделяет цели со статусом «чужой» от целей со статусом «свой», и запрещает стрельбу по целям со статусом «свой». Более того, когда система видит что к цели «свой» приближается цель «чужой», система предупреждает ЦБУ и самого (цель «свой»). Причем одной из задач автоматического функционирования системы может быть задача: стрельба по цели (чужой), в случае если она приближается на заданное растояние к цели (свой).
1.8.4. Бойцы (не снайпера, мобильно передвигающиеся на зоне боевого действия) участвующие в процессе выполнения боевой задачи, могут снабжаться очками с 3Д функцией, выполняющих роль, аналогичную панели управления. Показывающих окружающее пространство в виде виртуальной проекции созданной системой, в режиме реального времени, с фиксацией всех целей и элементов окружающей среды, с обозначением их параметров.
1.8.5. Система позволяет, использовать беспроводную (например спутниковую) связь организовать любое количество панелей управления в любой точке земного шара. В этом случае панель управления будет называться «удаленная панель управления» (УПУ)
1.8.6. Для любого вида панели управления, вместо монитора могут использоваться 3Д очки с перчаткой.
1.9. Система электроснабжения.
Все подвижные механизмы боевого комплекса работают на электрических и гидроэлектрических приводах. Как правило, центральное и основное электроснабжение идет от центра, из места где установлен центральный блок управления. Для соединения с центром используется многожильный провод который выполняет обе функции, и электронная связь периферического оборудования с центром, и снабжение периферического оборудования электричеством.
Каждое периферическое оборудование, работающее от центрального электрообеспечения, имеет аккумулятор, на работу от которого оборудование автоматически переходит в случае прерывания электропитания. Оборудование с повышенным потреблением электричества, типа огневой расчет, кроме аккумулятора имеет электро-генератор (ЭГ). На этапе подготовки к бою (наблюдения) система огневого расчета работает на аккумуляторе, после начала активной фазы, начала стрельбы, включается электро-генератор. Технология изготовления электрогенератора и место его установки выбирается с учетом максимальное визуальной и звуковой маскировки.
Некоторые варианты периферического оборудования, типа диагностические датчики, забрасываемые или доставляемые на точку дроном, не имеют проводной связи, и работают на аккумуляторах. Для них также не исключено использование элементов солнечной батареи.
По возможности, и в случае целесообразности, все элементы комплекса соединены между собой линиями электропередач, с целью дублирования источников электроснабжения, в случае разрыва кабеля.
1.10. Не обязательным, но возможным, является участие в работе комплекса снайперов (людей), своего рода человеческий огневой расчет, он же «снайперский расчет» (CP). При этом между снайперами с оборудованием и системой боевого комплекса происходит постоянный обмен информации.
У каждого снайпера (и помощника) есть мобильная панель управления, позволяющая снайперу пользоваться всеми камерами системы, с возможностью вербального контакта с оператором. И при необходимости согласовывать свою деятельность с действиями автоматизированного огневого расчета. При необходимости брать функции оператора на себя.
Если используемое снайперское оборудование предполагает настройку поправок целенаведения вручную, все необходимые параметры для поправок, снайпер получает через данную панель управления. Если используемое снайперское оборудование позволяет делать поправки автоматически, баллистический вычислитель дистанционно управляет механизмом внесения поправок, когда система автоматически формирует сигналы управления микродвигателями механизмов внесения поправок в прицелы, для этой цели оборудование снайпера подключается и согласовывается с центральным блоком управления, в части с модулями баллистического вычисления и модулями диагностических показателей. При этом автоматическая корректировка производится постоянно, в течение всего времени проведения операции.
В конструкцию ударно-спускового механизма винтовки вводится устройство электромеханической активации бойка, и на спусковой крючок устанавливается сенсорный датчик готовности стрелка.
Изображение и оптического прицела и бинокля (если он используется) проецируются, в режиме реального времени в центральном блоке управления. Оптический прицел винтовки содержит: модуль лазерного целеуказателя, корпус которого механически связан с механизмом внесения поправок оптического прицела и оптическая ось которого совмещена с оптической осью прицела; видеокамеру с цифровым выходом, автодиафрагмой, автофокусом и управляемым трансфокатором.
Используются радиосредства для вербального обмена информацией снайпера с оператором.
В этом случае в систему загружаются точные координаты снайпера (глонасс), и камеры системы видеонаблюдения с огневыми расчетами наблюдают за позицией снайпера с целью защиты его от огня и приближения противника.
Конструкция ударно-спускового механизма, в частности его связь с центральным блоком управления, позволяет и снайперам использовать в целях собственного камуфляжа имитаторы огневого расчета.
Комплектование снайперов в связи с представленной системой может соответствовать изобретению РФ №2498191.
2. Установка, подготовка и наладка боевого комплекса
2.1. - установку оборудования комплекса
2.1.1. Установка огневого расчета, одного или более. Наладка цифровой связи с центром управления и наладка электроснабжения. Станок и защитный каркас огневого расчета крепятся к почве жестко, отдельно, то есть внутренние механизмы огневого расчета не соприкасаются с элементами каркаса (кроме вариантов на самоходных платформах). Огневые расчеты размещаются таким образом, чтобы могли огнем защищать друг друга и имитаторы.
В зависимости от наличия (отсутствия) времени и возможности на подготовку, от особенностей местности, от особенностей боевой задачи, огневой расчет может быть:
2.1.1.1. Огневой расчет вкопан в землю (фиг). Когда есть достаточно времени для подготовки, когда на территории будущего боя нет врага и других сведетелей. Как правило, размещается на пути наступающего врага, на пути отступающего врага, на подходе к защищаемому объекту (территории). Выкапывается котлован, устанавливается огневой расчет, засыпается землей и закладывается дерном. Верхняя подвижная часть (башня с бойницей) маскируется под элемент ландшафта.
2.1.1.2. Огневой расчет установлен на землю (фиг). В ситуациях когда на закапывание огневого расчета не хватает времени, или это невозможно сделать скрытно. В этом случае огневой расчет накрытый бронезащитой изготовлен внешне под элемент ландшафта, например куча земли или мусора или кирпичей, или часть полуразвалившейся стены здания.
2.1.1.3. Огневой расчет установлен на самоходную гусеничную платформу (МБОР) (фиг…), при этом при этом сам огневой расчет не замаскирован, но может выезжать на огневую позицию в любой момент боя. В данном случае технология отцентровки и целенаведения иная (отличная от описанной стандартной).
2.1.2. установка камуфлирующих дымовых шашек (комуфляторы). Цель их: при необходимости задымлять огневой расчет. Наладка цифровой связи комуфляторов с центром управления, с огневым расчетом, и наладка электроснабжения.
2.1.3. установка имитаторов огневых расчетов ИОР (один или более). Имитаторы должны быть в поле обстрела реальных огневых расчетов. Чтобы не допустить приближению к имитатору врага. Враг может знать о наличии имитатора, но он не должен знать что это именно имитатор, для этого нельзя его допустить близко. Наладка цифровой связи имитаторов с центром управления, с огневым расчетом, и наладка электроснабжения.
2.1.4. установка наземных расчетов системы видеонаблюдения (НРВ) для визуального контроля (во всех доступных современному уровню техники спекторах: видимый, ИК, УФО, ультрозвуковое сканирование, системы ночного видения, системы подцветки для ночного видения и т.д.) в том числе источники электромагнитного излучения. Наладка цифровой связи камер системы видеонаблюдения с центром управления, с огневым расчетом, и наладка электроснабжения.
2.1.5. Установка ветрометров, оборудование фиксирующее направление и скорость ветра. Устанавливается предварительно вручную, или с помощью квадрапторов, или посредством «закидывания», или с помощью собак. Оборудование измеряет и автоматически передает в систему вычисления параметры направления и скорости.
В случае если невозможно установить ветрометр, с помощью специальной программы через систему видеонаблюдения фиксируются естественные ветровые ориентиры, (деревья, свободно висящие предметы), если есть возможность (якобы естественный ориентир) может быть специально подвешен до или во время боя, например веревка, с маячками на концах. Задаются определенные параметры, для примерного определения направления и силы ветра. На протяжении всего боя, система видеонаблюдения фиксирует движение выбранных объектов, на основании чего делает выводы о предположительных направлении и силе ветра, используя данные параметры для целенаведения.
В случае невозможности направления и скорости ветра, производится диагностический выстрел, с видеофиксацией несоответствия точки прицеливания и точки попадания, с автоматическим и моментальным вычислением поправок на прицеливание. То же самое происходит при каждом боевом выстреле, (если отклонение более естественного разброса).
В случае установки оборудования (ветрометры) предварительно, наладка цифровой связи ветрометров с центром управления, с огневым расчетом, и наладка электроснабжения.
2.1.6. Установка иного диагностического оборудование, фиксирующее и передающее в систему вычисления, в реальном времени: а) атмосферное давление, б) температуру воздуха, в) влажность воздуха. В случае возможности предварительной установки оборудования, наладка цифровой связи с центром управления, с огневым расчетом, и наладка электроснабжения. В случае невозможности предварительной установку, оборудование может быть размещено путем «забрасывания», доставки к месту дроном, обученной собакой и т.д. В этом случае используется оборудование на аккумуляторах и с беспроводной связью.
2.1.7. Установка центрального блока управления (компьютер с программой (ПО)). Системный блок (сервер) с установленным специальным программным обеспечением. Как правило, устанавливается на расстоянии, безопасном от места выполнения боевой задачи. Как правило, устанавливается на колесной базе (мобильна).
Как правило центральный блок управления совмещен с панелью управления оператора, при этом панель управления проводным образом связана с центральным блоком управления, в этом случае панель управления стационарная.
У каждого огневого оборудования (орудие, винтовка) есть собственный (локальный, встроенный) программный блок, который включает и реализует программу боя в автоматическом режиме, в случае потери связи с центральным блоком.
2.1.8. Установка и устройство стационарной(ых) панели управления. Настройка мобильных и удаленных панелей управления.
В зависимости от количества огневых расчетов в составе комплекса, от количества и качества целей, а также в зависимости от других особенностей боевого задания (например наличие заложников или гражданских в зоне боевого задания), функцию операторов могут выполнят два и более людей, при этом для каждого оператора оборудуется отдельное рабочее место (панель управление), при этом функционал боевого задания делится между операторами определенным образом.
2.1.9. Устройство настройка и проверка связи между всеми элементами комплекса, как проводной связи так и беспроводной.
2.1.10. Установка, настройка и проверка электроснабжения. Установка, настройка и проверка аккумуляторов и генераторов.
2.2. - Построение системой виртуальной, цифровой копии реального пространства, с точным определением и фиксированием точных растояний и координат.
Отцентровка всех элементов системы и окружающей среды к координатам (пространственной модели). Каждый элемент системы (стрелковое оборудование, система видеонаблюдения, элементы диагностики состояния среды) имеет датчик точного геопозицирования, получает точные координаты в виртуальной копии реального пространства. Для точного геопозиционирования используется также анализ угловых расстояний системы видеонаблюдения (включая собственную оптику оружия), измерение расстояний с использованием лазерных и инфразвуковых технологий, при возможности и целесообразности уточненное геопозиционирование по глонасс (GPS). На основании данных координат будут рассчитываться направления наведения, расстояния до целей, поправки на возможные воздушные потоки, связанные со складками местности (принимая во внимание направление и скорость ветра). Предварительное «сканирование» окружающего пространства, вычисление и уточнение всех расстояний по неподвижным ориентирам, формирование и уточнение (размерных) параметров виртуальной пространственной ЗД модели реальной местности.
Отцентровка целенаведения всех огневых расчетов, при возможности и целесообразности произведение диагностических выстрелов.
2.3. Подготовка к программированию боевых задач. Оператором определяется статус отдельных элементов пространства: а) неподвижные - складки местности, земельный ландшафт, б) относительно неподвижные - деревья, здания, в) относительно подвижные - транспортные средства в неподвижном состоянии, г) подвижные - люди, животные. Необходимость нюансы данной процедуры определяется в зависимости от целей и условий задачи. Оператором уточняются параметры которые система не смогла произвести автоматически. Система учится распознавать элементы местности и разновидности движения. Производится тестирование (проверка) программы на адекватность распознавания программой целей, движений, задач. Оператор проверяет, при необходимости корректирует.
2.4. - Программирование оператором(ми) боевых задач
2.4.1. настраивание технических условий и параметров задач, введение предварительных целей:
…а) Выбор точек цели на неподвижных объектах (автоматическое фиксирование расстояний и углов, расчет и сохранение параметров целенаведения. Это могут быть: элементы электроснабжения, элементы средств связи, источники освещения, объекты хранения грючего (цисцерны с топливом), оконные проемы, дверные проемы, огневые расчеты противника (если выявлены) и т.д.
…б) задачи на отслеживание и захват подвижных целей, исключение типов целей, например животных или людей имеющих специальные маяки (подвижная цель статуса «свой, не стрелять»).
…в) выбор точки прицеливания на подвижных объектах (для объектов типа человеческая фигура выбирается конкретная часть тела, для объектов типа автомобиль, выбирается на ЗД проекции необходимая точка, например точка перед креслом водителя (место нахождения туловища водителя), зона перед креслом рядом с водителем, место нахождения топливного бака, колес, двигателя и т.д. С момента выбора точки и до окончания задания программа контролирует местонахождение (координаты) выбранных точек, и при необходимости (по сигналу) готова навести оружие на данные точки.
2.4.2. Программирование основных параметров будущего боя (боевого задания). Определяется алгоритм действия системы (программа) при выполнении боевой задачи, принимая во внимание особенности местности, особенности задания, количество операторов, целесообразность привлечения удаленных операторов и т.д.
2.4.2.1. поиск захват, сопровождение цели, ожидание команды. Если система видеонаблюдения позволяет найти, определить, захватить, идентифицировать подвижную цель самостоятельно, оператор или не вмешивается или просто контролирует (проверяет). Если возможности программы не позволяют идентифицировать и «захватить» цель, эту процедуру проводит оператор.
2.4.2.2. выбор способа команды на выстрел, по команде оператора, или автоматически, ввод условий для автоматического выстрела, например:
…а) привязка к времени; б) привязка к условию или действию (например: включение или выключение освещения; передвижение какого-то о объекта в каком-то направлении; достижение целью или иным объектом определенной скорости; достижение целью или иным объектом определенного расстояния или песта; при определенных диагностических параметрах, например ветра; при определенном положение объектов статуса «свой», и т.д.
2.4.2.3. выставление приоритетов в целях, например в первую очередь те которые находятся ближе или дальше от какой-то точки, или направление и скорость движения которых определенная, или место появления которых определенная (напримар огневой расчет или дверной проем). И т.д.
2.4.2.4. задаются условия при которых система начинает работать в автоматическом режиме, или перестает работать в автоматическом режиме.
2.4.2.5. Программируется задача для каждого огневого расчета на случай прерывания связи расчета с ЦБУ. Данная программа записывается на внутренний блок управления огневого расчета.
2.5. Для программирования параметров будущего боя, для программирования боя в автоматическом режиме, и ведения самого боя, в зависимости от обстоятельств, может понадобиться большое количество специалистов (операторов) из разных областей знаний, для этого используются удаленные панели управления.
3. После установки и настройки системы, выбора предварительных целей, выбора программы функционирования для автоматического режима, и до начала выполнения задания инициированного оператором, система находится в состоянии активного ожидания. В этом состоянии система все видит, отслеживает все цели, собирает всю диагностическою информацию, делает все поправки целенаведения для всех целей, «ждет» команду для начала выполнения боевой задачи.
Все изменяемые параметры передаются не только в центральный блок управления, но и во внутренние блоки управления огневых расчетов, и там хранятся на случай разрыва связи с центром.
3.1. Как в состоянии активного ожидания, так и в состоянии выполнения боевого задания, система собирает, анализирует, и хранит в актуальном состоянии всю необходимую информацию для коррекции наведения каждого конкретного стрелкового оборудования, используемого конкретный вид боевого припаса, для каждого конкретного объекта цели:
а) расстояние до цели,
б) скорость и направление движение цели (для подвижных целей),
в) угловые (вертикальные) значения линии прицеливания (углы места цели), углы и направления (горизонтальные) относительно оси вращения земли, если данный момент вращения использовать целесообразно
г) баллистические характеристики заряда, включая направление нарезки ствола «деривацию». Причем, если для последующего боя предполагается использование боеприпасов разного качества и назначения, система рассчитывает поправки на параметры целенаведения с учетом баллистических данных всех видов готовых к использованию боеприпасов.
д) направление и скорость ветра, причем в местах где предположительные траектории пролегают рядом с большими объектами, например горы, скалы, здания, программа автоматически производит поправку на изменение воздушных потоков относительно препятствий. Если нет возможности измерить реальные параметры, используются направление и скорость преобладающего в этой местности ветра
е) атмосферное давление (вырожденность плотности (разряженности, вязкости воздуха)
ж) температура воздуха, причем принимается во внимание наличие под предполагаемой траектории выстрела открытого водоема.
з) влажность воздуха,
и) фиксирование огневых точек противника, в том числе в ночное время, с целью определения точного местоположения огневых расчетов противника. Ведение статистики функционирования огневых расчетов противника. На основании статистики выявление характера и принципов пользования противником данных мест для стрельбы. Разработка предложений по использованию результатов анализа в целях выполнения боевого задания.
3.2. Наблюдая за движениями целей программа запоминает предпочитаемые пути передвижения (возможные дорого, тропинки), места в которых цели появляются и пропадают (возможные входы в укрытия, блиндажи), считает возможное количество целей.
4. Ведение боя оператором(ами), в автоматизированном режиме.
Оператор(ы) находится, как правило, в безопасном месте, на мониторах панели управления оператор может видеть картинку с любых камер видеонаблюдения, в том числе с собственной оптики орудий.
Можно также видеть на схематичном (виртуально) плане все объекты отслеживаемые системой, в том числе невидимые в видимом спектре. Выделение объектов доступных для выстрела отличаются от объектов недоступных для выстрела. В свою очередь объекты, по которым рассчитано целенаведение (с учетом поправок по всем параметрам) выделением отличаются от объектов, по которым параметры целенаведения еще не просчитаны.
Количество панелей управления организуется по количеству операторов. Для каждого оператора определяется рамки его функциональных задач и компетенций.
Если опустить нюансы предварительных настроек (упрощенно, схематично).
4.1. Выбирается объект (цель), выделяется манипулятором.
4.2 для данной выделенной цели выбирается параметр выстрела:
а) Выстрел может быть запущен сразу, кликом манипулятора (компьютерной мыши, клавиши, или др.), если на данную цель уже произведено целенаведение. Система отслеживает результат выстрела, по ранее запрограммированным параметрам, при необходимости система предлагает сделать повторный выстрел. Причем может быть произведена настройка, при которой повторный выстрел делается незамедлительно, автоматически, в случае если выполнение задание не подтверждено визуально. Принимая во внимание скорость работы системы, целенаведение происходит за доли секунды, как только объект становится доступен наблюдению.
б) в случае если объект «захвачен», но только одной камерой и не собственной оптикой орудия, но для целенаведения этого недостаточно (для вычисления точных координат скорости и траектории движения нужен захват минимум двумя камерами), на данную цель выстрел программируется на момент целенаведения. После этого внимание оператора может быть перенесено на другие задачи. Система сама следит за целью, и как только будет достаточно информации чтобы сделать точные расчеты (например объект попадет в поле видимости второй камеры), и будут произведены необходимые расчеты для целенаведения, система сама запустит выстрел, проследит результат, при необходимости продублирует выстрел, и просигналит оператору.
в) может быть запрограммирован автоматический выстрел, на все цели появляющийся в определенном месте, например дверной проем здания или оконный проем, или выстрел по цели приближающейся к определенной точки на определенное расстояние, например по целям приближающимся к дверному проему здания.
в) Выстрел для выделенных целей может быть запланирован на временной параметр, например выстрел в точное время.
г) выстрел по цели может быть привязан к событию не связанному с этой целью, но которое система может зафиксировать, например в момент включения или выключения какого-то освещения, в каком-то месте, или начало или окончание движения какого-то объекта, например автомобиля.
д) выстрел может быть привязан к скорости цели, например в момент когда скорость цели превысит или принизит какую-то заданную
е) выстрел привязывается к особенностям траектории цели (целей), например совершение выстрела только в тот момент, и в ту цель, когда траектория всех целей такова, что вероятность, что цели увидят (заметят) выстрел (вспышку) огневого расчета, минимальна (даже если использовать тему с имитаторами). С таким расчетом можно запрограммировать все выстрелы по всем целям
ж) выстрел может быть привязан к обстоятельствам выгодной траектории для цели, т.е. только в тот момент когда цель неподвижна, или движется не поперек линии прицеливания, а вдоль ее
з) выстрел может быть привязан к обстоятельствам связанным с несколькими целями, например, начать выстрелы только тогда, когда в поле досягаемости выстрела, и произведенным целенаведением окажутся все запланированное количество целей, при этом, принимая во внимание что количество огневых расчетов будет менее количества целей, приоритет в очередности выставляется начиная с тех целей, которым легче и быстрее покинуть зону обстрела, например появившимся в оконном или дверном проеме, находящихся рядом с естественным или искусственным укрытием, и только затем включаются цели находящиеся на открытой местности, находящихся относительно далеко от укрытий. Все необходимые для этого расчеты могут производиться системой самостоятельно.
4.3. Результаты каждого выстрела анализируются системой, если точка попадания не совпадает с точкой прицеливания (принимая во внимание явление естественного разлета), это может быть вызвано, например, изменением ветра незафиксированного диагностикой, система автоматически и мгновенно делает поправки на целенаведение. Эти поправки системой статистически анализируются, вырабатывается комплекс рекомендаций по расчетам, траекторий. Если результаты определяются как статистически значимые, система использует их автоматически, или предлагает оператору включить автоматическое использование их.
4.4. если в боевом задании учувствуют бойцы, при условии если система не может идентифицировать как цель (свой) или цель (чужой), то система НЕ программируется на выстрелы в автоматическом режиме. Система работает только в автоматизированном режиме, когда оператор нажимает на выстрел только тогда, когда лично визуально удостоверился в принадлежности цели к (чужой).
4.5. Для того чтобы система распознавала «своих», свои в обмундировании используют специальные маячки, которое издают специальное излучение, которое фиксируется системой видеонаблюдения. Этот же процесс может дублироваться использованием точной GPS навигации
4.6. при использовании сил военной разведки, на этапе подготовки к бою, усилиями лазутчиков, на особо ценные объекты противника (транспортные средства, центры оборудования связи и электроснабжения, места хранения топлива и т.д.), могут быть установлены специальные маяки, для точного целенаведения, в условиях нулевой видимости. То же самое можно делать с элементами одежды и снаряжения противника.
5. Ведение боя в автоматическом режиме. В данном случае имеется в виду ведение боя системой, когда полностью прервана связь системы с центром управления, и операторы не могут влиять на работу комплекса в целом или отдельных его элементов.
5.1. Программирование системы на работу в автоматическом режиме происходит на этапе подготовки к заданию. Программы на автоматическую работу могут быть подготовлены (прописаны) заранее, и установлены на локальные блоки управления огневыми комплексами заранее, до их установки и настройки.
5.2. Для каждого конкретного случая используется конкретная программа. В случае отсутствия в каталоге программ необходимой для новых условий, программа готовится под эти условия. Любая готовая программа может быть видоизменена, элементы ее могут быть убраны или добавлены.
5.3. Задачами составляющих программу могут быть:
а) стрельба по любой движущейся цели
б) стрельба по цели, рост которой превышает заданные параметры
в) стрельба по цели на которой зафиксированны стальные элементы, типа: оружие; бронежилет; каска и т.д.
г) стрельба по цели в определенном типе одежды
д) стрельба по любым целям приближающимся к огневому расчету, или к имитатору огневого расчета, или к диагностическому оборудованию (включая ветрометры) и т.д.
5.4. Использование боевого комплекса, в том числе его работу в автоматическом режиме, не исключает участия в процессе снайперов.
5.5. особое внимание уделяется выполнению боевой задачи, боевым комплексом совместно с живой силой. Бойцы должны иметь на себе оборудование позволяющее системе идентифицировать их как (цель «свой»), в противном случае, при разрыве связи с центром управления боевые расчеты перестают отрабатывать боевое задание, т.е. бой в автоматическом режиме НЕ ведется, кроме огневой защиты от целей приближающихся к самим огневым расчетам, имитаторам огневых расчетов, диагностическому оборудованию и генераторам электропитания. Для отключения системы в ручном режиме разработан специальный алгоритм действий, хранящийся в тайне.
Краткое описание рисунков
Группа изобретений: Автоматизированный боевой комплекс, способ целенаведения огневого расчета, способ ведения боя в автоматизированном и автоматическом режимах.
Фигура 1: Схема комплектования боевого комплекса при минимальном наборе полевого оборудования.
1. - (ОР) огневой расчет. Соединен со всеми элеме6нтами боевого комплекса, с панелями управления соединен через центральный блок управления (ЦБУ)
2. - (ИОР) имитатор огневого расчета. Соединен с ОР и ЦБУ. С ОР соединен на случай функционирования в автоматическом режиме, при разрыве связи с ЦБУ.
3. - (НВР) наземный расчет видеонаблюдения. Соединен с ОР и ЦБУ. С ОР соединен на случай функционирования в автоматическом режиме, при разрыве связи с ЦБУ.
4. - (ДО) диагностическое оборудование (определитель скорости и направления ветра, давление воздуха, влажность воздуха, температура воздуха. Соединен с ОР и ЦБУ. С ОР соединен на случай функционирования в автоматическом режиме, при разрыве связи с ЦБУ.
5. - (ЦБУ) центральный блок управления, соединен со всеми элементами боевого комплекса. Представляет собой сервер (системный блок мощного компьютера), с установленным на него програмным обеспечением.
6. - (ПУ) панели управления разных видов
6.1. - (СПУ) стационарная панель управления, как правило находится там же где и ЦБУ, соединена с ЦБУ проводом, представляет собой: набор мониторов, клавиатура, набор манипуляторов типа мышки, джойстиков и другие.
6.2. (МПУ 6.2.) мобильная панель управления типа ноутбук с предустановленной специальной программой, с определенным набором функций. Соединен с ЦБУ проводной и/или беспроводной связью. Используется в случае выдвижения оператора на поле боя, при необходимости видеть поле боя своими глазами.
6.3. (МПУ 6.3.) мобильная панель управления типа планшет, с предустановленным специальным приложением с определенным набором функций. Соединен с ЦБУ беспроводной связью. Используется людьми участвующими в боевых действиях, люди-снайпера, люди-бойцы.
6.4. (МПУ 6.4.) мобильная панель управления типа смартфон с предустановленным специальным приложением, с определенным набором функций. Соединен с ЦБУ беспроводной связью. Используется людьми участвующими в боевых действиях, люди-снайпера, люди-бойцы.
6.5. (УПУ 6.5.) Удаленная панель управления, представляет собой компьютер с мощным системным блоком, с предустановленной специальной программой, набором оборудования и функционалом аналогична СПУ, но находится удаленно и связана с ЦБУ через сеть интернет или аналогичные средства связи. Место размещения УПУ ограничено только возможностями интернета.
6.6. (УПУ 6.6.) удаленная панель управления упрощенного варианта, представляет собой любой компьютер подключенный к интернет, никакое ПО не придустанавливается, для данного вида ПУ разрабатываются браузерный интерфейс работы с системой.
A) - проводная связь
Б) - беспроводная связь
Фигура 2: Схема комплектования боевого комплекса при двойном наборе полевого оборудования.
Обозначения элементов те же.
(ОР) огневые расчеты соединены не только с ЦБУ и иным оборудованием, но и друг с другом, для того чтобы согласованно выполнять боевое задание в автоматическом режиме.
Когда боевое задание сложное, используются несколько ОР, и количество целей может быть большим, оборудуется и используется не один СПУ а два и более, при этом операторы находятся рядом друг с другом, и рядом с ЦБУ. При необходимости привлекаются удаленно находящиеся специалисты, через УПУ.
B) проводная или беспроводная связь
Г) проводная связь
Фигура 3: огневые расчеты, варианты установки, (схематично)
A) наземная установка огневого расчета. ОР монтируется на землю. Станок (12) с орудием (11) фиксируется к земле отдельно, от фиксирования к земле бронезащиты (14). (13) механизмы фиксирования к земле.
Б) подземная установка огневого расчета, перед установкой выкапывается типа «колодец», основная часть оборудования ОР находится ниже уровня земли, над уровнем земли возвышается орудие и колпак бронезащиты.
B) мобильный бронированный огневой расчет (МБОР), оборудование ОР под колпаком броневой защитой устанавливается на самоходную гусеничную платформу (15).
Г) огневой расчет, замаскированный под транспорт, как вариант оборудование ОР монтируется в полости багажника автомобиля (16). Как правило, для боевых задач в городских условиях.
Осуществление группы изобретений: «Автоматизированный боевой комплекс, способ целенаведения огневого расчета, способ ведения боя в автоматизированном и автоматическом режимах»
Описанные компоненты заявленного изобретения структурно построены по известным правилам и выполнены на известной элементной базе с соблюдением требований по уровням сигналов, питающего напряжения и быстродействию. Миниатюрные цифровые видеокамеры с автодиафрагмой, автофокусом и управляемым трансфокатором известны и широко применимы.
Боевой комплекс: комплекс механизмов, оборудования, систем, приспособлений, приборов, работающих автоматизировано и автоматически, функционально соединенных воедино, целью функционирования которых является выполнение боевых задач. Программирование контроль и управление комплексом может происходить удаленно.
В зависимости от задачи, целей и обстоятельств принцип комплектации системы и ее подготовки может быть разный.
1. Огневой расчет «ОР», содержит: орудие на станке с электромеханическим приводом нацеливания, с оборудованием фиксирующим точную ориентацию направления; оптику прицеливания; картриджи для боеприпасов с системой автоматической перезарядки; локальный блок управления; аккумуляторную и генераторную систему дублирования электропитания; датчик глонасс (GPS) позиционирования; броневой камуфлированный каркас с собственным электромеханическим приводом, элементы оборудования проводной и беспроводной связи с центральным блоком управления и другими элементами боевого комплекса. Огневой расчет может использовать разные виды боевых орудий,: стрелковое, гранатометы, ракеты. Для стрелкового орудия могут использоваться стволы разного калибра. Для одного ствола могут использоваться разные боеприпасы. Оптика прицеливание содержи лазерный целеуказатель и лазерный определитель расстояния.
2. При возможности и необходимости устанавливаются (закидываются) активные элементы камуфляжа (маскировки) огневого расчета. Как вариант: активные дымовые шашки, размещенные с разных сторон от огневого расчета, включаются и выключаются автоматизировано по сигналу оператора, или автоматически согласно заданной программе.
3. При возможности и необходимости устанавливаются имитаторы огневого расчета. Имитатор имитирует выстрелы в визуальном и звуковом спектре, синхронно (или с упреждением) с выстрелами реальных огневых расчетов.
4. Устанавливаются расчеты системы видеонаблюдения, камуфлируются, используются средства броневой защиты. Система а состоит из разных камер, разных типов, в том числе использующих излучения невидимых спектров, инфразвук, систем ночного видения, систем лазерного наведения и пр., Программное обеспечение системы позволяет находить, идентифицировать, «захватывать» и сопровождать цели. Определять точное направление и точное расстояние. При необходимости и возможности используются камеры с дроны, система спутникового видео и фото наблюдения,
5. Устанавливается диагностическое оборудование: определители направления и силы ветра, давление, температура, влажность. Диагностическое оборудование имеет глонасс (GPS) позиционирование.
6. Оборудуется Центральный блок управления, со стационарным пунктом управления. Устанавливается, настраивается связь центрального блока управления со всеми элементами боевого комплекса и и между элементами комплекса. Устанавливается связь центрального блока с интернет.
7. Устанавливается, проверяется и настраивается электроснабжения, для всех элементов боевого комплекса. Устанавливаются и настраиваются аккумуляторные системы и дизельные электро-генераторы.
8. Программным обеспечением простраивается виртуальная, цифровая копия реального пространства поля боя, с точным определением и фиксированием точных расстояний и координат.
9. Подготовка к программированию боевых задач, определение статуса отдельных элементов пространства, уточнение параметры которые система не смогла произвести автоматически, введение параметров для распознавания элементов пространства, движения, и задач. Производится тестирование (проверка) программы на адекватность распознавания программой целей, движений, задач. Оператор проверяет, при необходимости корректирует.
10. Программирование оператором боевых задач, в том числе на случай перехода оборудования на автоматический режим ведения боя. Настраивание технических условий и параметров задач, введение параметров целей. Программирование основных параметров будущего боя (боевого задания). Определяется алгоритм действия системы (программа) при выполнении боевой задачи, принимая во внимание особенности местности, особенности задания, количество операторов, целесообразность привлечения удаленных операторов и т.д. Выставление приоритетов в целях,
11. задаются условия, при которых система начинает работать в автоматическом режиме, или перестает работать в автоматическом режиме.
12. Принимается решение о комплектации операторами, в том числе удаленными, настраиваются удаленные панели управления
13. При ведении боя в автоматизированном режиме, операторы находятся в безопасном месте, используют стационарные панели управления, при необходимости операторы выдвигаются к полю боя, с мобильными панелями управления.
14. При необходимости, функционирование системы переводится на автоматический режим. Во время работы в автоматическом режиме система не только выподлняет боевую задачу, но и защищает все элементы комплекса
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЙ СТРЕЛКОВЫЙ ТРЕНАЖЕР "ТЭСТ" | 2016 |
|
RU2640952C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЕДЕНИЕМ СНАЙПЕРСКОГО ОГНЯ | 2011 |
|
RU2474782C1 |
| МОДУЛЬ УПРАВЛЕНИЯ ОГНЕМ БОЕВОЙ МАШИНЫ | 2024 |
|
RU2839539C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2839637C1 |
| АВТОМАТИЗИРОВАННЫЙ ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ КОМПЛЕКС ОГНЕВОГО ПОРАЖЕНИЯ | 2008 |
|
RU2386920C2 |
| АВТОМАТИЗИРОВАННЫЙ ДИСТАНЦИОННО-УПРАВЛЯЕМЫЙ НАБЛЮДАТЕЛЬНО-ОГНЕВОЙ КОМПЛЕКС | 2018 |
|
RU2718622C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| СПОСОБ СТРЕЛЬБЫ ИЗ БМД-4М В РЕЖИМЕ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2715940C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2737634C2 |
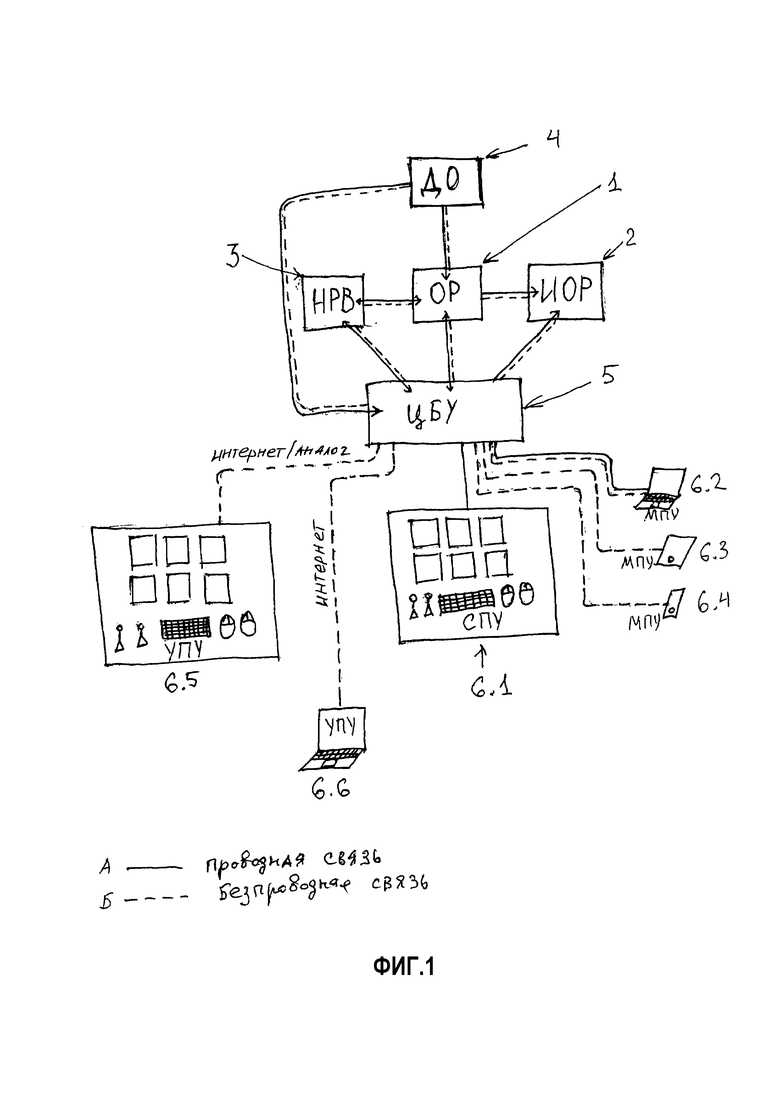
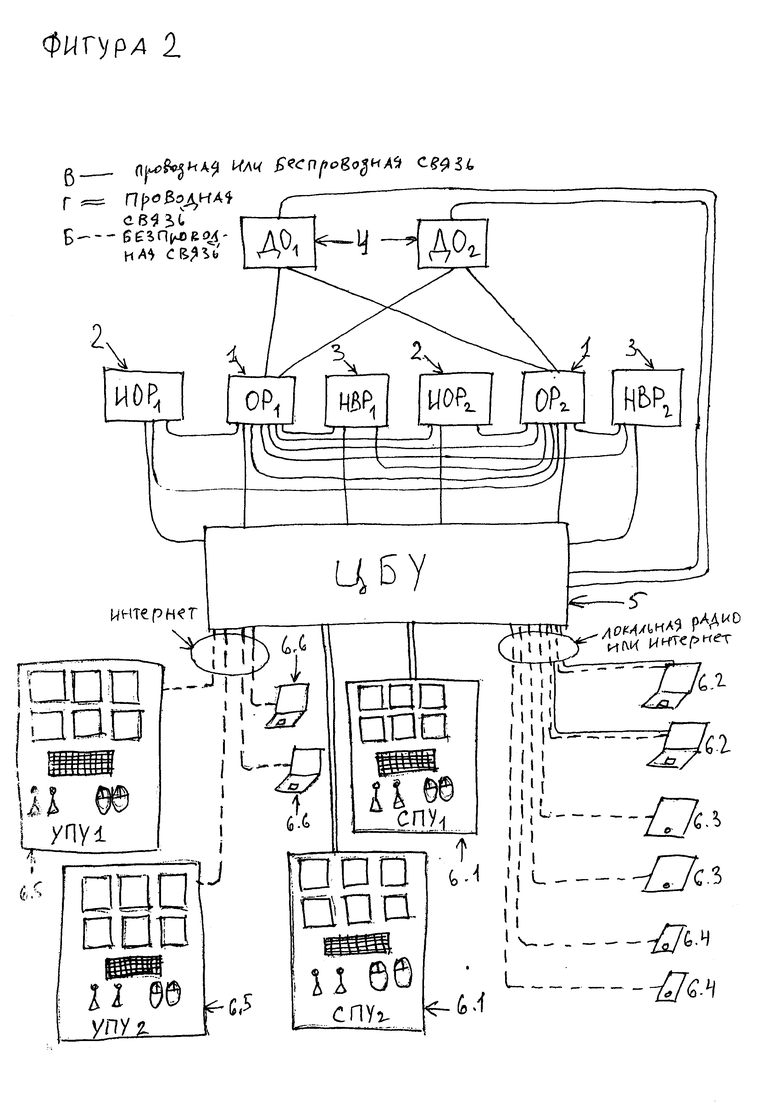

Изобретение относится к боевому стрелковому комплексу. Боевой стрелковый комплексу состоит из: - автоматических самозарядных стрелковых установок, использующих разные типы боеприпасов (пули, гранаты, ракеты и т.д.), имеющих бронированную и камуфлированную защиты, управляющихся удаленно, имеющих оптические прицелы; - имитаторов огневого расчета, имитирующих выстрелы визуально вспышкой выстрела, звуком выстрела и имитацией выхода пороховых газов; - системы видеонаблюдения, состоящей из нескольких систем камер, использующих для видеоконтроля разные виды излучения; - диагностического оборудования, собирающего (и передающего в центр управления) информацию о состоянии окружающей среды, в режиме реального времени; - программного комплекса, состоящего из высокопроизводительной компьютерной системы автоматизированного управления огневыми средствами, обеспечивающей максимальную оперативность обмена информацией в интересах повышения эффективности огневых средств, для всех необходимых вычислений целенаведения, работы с целями, видения боя в автоматизированном и автоматическом режимах; - панелей управления (стационарная, мобильная, удаленная), через которые, любое количество операторов работают с боевым комплексом, в том числе удаленно (из любой точки). Достигается создание высокопроизводительной системы автоматизированного управления огневыми средствами, обеспечивающей максимальную оперативность обмена информацией в интересах повышения эффективности огневых средств в условиях ведения боя. 8 з.п. ф-лы, 3 ил.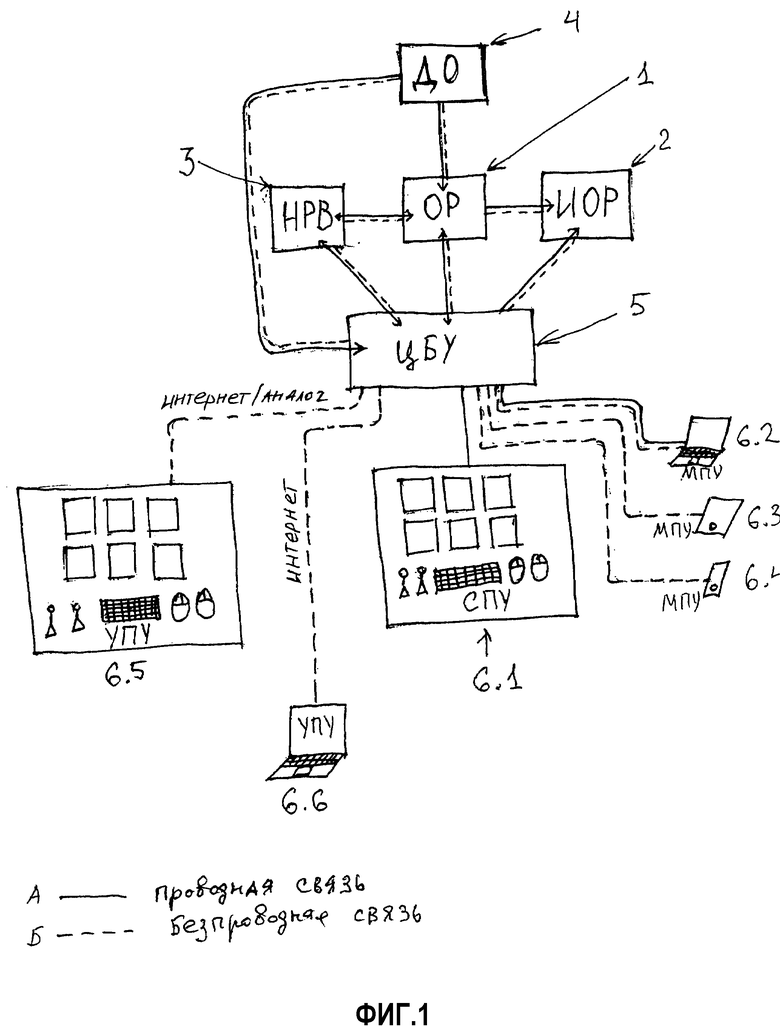
1. Автоматизированный боевой комплекс, представляющий собой систему автоматизированного дистанционного или автоматического управления огневыми средствами, состоящий из соединенных между собой проводным и/или беспроводным способом: огневого расчета, системы видеонаблюдения, системы диагностического оборудования, фиксирующей показатели состояния внешней среды, центрального блока управления, созданного на базе электронно-вычислительной машины, системы расчета параметров, панели управления, с помощью которой оператор работает с комплексом,
характеризующийся наличием стрелкового автоматического оборудования на подвижной станине с электромеханическим приводом, электронно-вычислительной машины, аппаратуры передачи данных, технических средств автоматизации процессов обслуживания огневых средств, многоканальных коммутирующих устройств их электрического сопряжения с оборудованием целеуказания и целенаведения, генерацией информации о цели, видеосистемой с привязкой к спутниковой навигационной системе, оборудованием фиксирования параметров окружающей среды, и огневых средств,
отличающийся тем, что
огневые расчеты комплекса всегда защищены камуфлированной броней, имеющей собственные электромеханические приводы, для управления элементами брони, могут быть: а) боевыми стационарными, замаскированными; б) боевыми мобильными, на подвижной бронированной гусеничной платформе; в) не боевыми имитаторами, имитирующими выстрелы; г) человеческим снайперским огневым расчетом, причем все элементы комплекса соединены с блоком центрального управления и друг с другом разными дублирующими способами связи и разными дублирующими способами электроснабжения, причем в отдельных случаях для работы элементов системы используются аккумуляторные системы и электрогенераторы.
2. Автоматизированный боевой комплекс по п. 1, отличающийся тем, что огневой расчет может быть оборудован разными типами орудий и разными типами боеприпасов, причем орудия автоматические, самозарядные, в составе своем имеющие картриджи боеприпасов, автоматически перезаряжающиеся, способные заряжать орудие, выборочно, запрограммировано, разными типами боеприпасов, причем система автоматически вычисляет и запоминает, какой именно боеприпас предполагается использовать для автоматического выбора нужной баллистической поправки, соответственно выбранному для стрельбы типу орудия и боеприпаса.
3. Автоматизированный боевой комплекс по п. 1 или 2, отличающийся наличием у огневых расчетов собственного электрогенератора и локального блока управления, с установленными необходимыми элементами программного обеспечения, позволяющего огневому расчету выполнять боевую задачу в автоматическом режиме при разрыве связи с центром управления, используя для поправок на наведение данные от диагностического оборудования напрямую.
4. Автоматизированный боевой комплекс по п. 1, отличающийся наличием специального программного обеспечения, входящего в состав оборудования, системы и способа целенаведения, которые на этапе предбоевой установки и настройки, с помощью всех доступных приборов и оборудования, в том числе спутникового, «сканирует» пространство, и проектирует ее виртуальную 3Д копию плана местности с фиксированием всех точных расстояний, углов и направлений, с точным указанием местонахождения всех элементов комплекса, причем особо выделяются участки местности, которые могут влиять на баллистику.
5. Автоматизированный боевой комплекс по п. 4, отличающийся тем, что программа комплекса целенаведения сама ищет, находит, распознает, «захватывает», сопровождает цели, причем для каждой цели и от каждого орудия, каждого огневого расчета, мгновенно, в режиме реального времени, автоматически рассчитываются все баллистические поправки целенаведения, используя расстояния, направления, углы, скорости, используя оперативные данные диагностических датчиков: ветер, температура, давление, влажность, также используя баллистические данные всех планируемых к использованию видов вооружения и видов боезапасов, причем и в процессе «активного ожидания» и в процессе боя система сохраняет траектории передвижения и обстоятельства появления и исчезновения целей, статистически обрабатывает информацию и предлагает оператору информацию для анализа и возможного использования в планировании боя.
6. Автоматизированный боевой комплекс по п. 4 или 5, отличающийся тем, что на этапе подготовки к бою или во время боя оператор программирует параметры будущего/происходящего боя, определяет для программирования комплекса целенаведения качества и характеристики потенциальных целей, задач, и условий выполнения задач, причем именно этими заданными параметрами программа руководствуется для поиска целей, и при выполнении боевых задач в автоматическом режиме, причем с помощью оператора из пространства выделяются неподвижные элементы пространства, которые могут быть обозначены как потенциальные цели стрельбы, как реальные цели для будущей стрельбы, как объекты, стрельба в сторону которых запрещена, причем выбираются точки прицеливания на неподвижных и подвижных целях, определяется алгоритм боя, выставляются приоритеты, задаются условия, при которых система начинает работать в автоматическом режиме или прекращает работать в автоматическом режиме, причем данный алгоритм действий предназначен для упрощения работы оператора при ведении боя в автоматизированном режиме, при этом все аналитические расчеты делает программа, а оператор решает стрелять или не стрелять, или данный алгоритм используется программой для работы в автоматическом режиме, для этого программа сохраняется на локальном блоке управления огневого расчета.
7. Автоматизированный боевой комплекс по пп. 1-6, отличающийся тем, что позволяет вести бой в автоматизированном режиме, когда оператор на мониторах пульта управления видит видео обзоры поля боя с разных камер и виртуальную схему местности с обозначением целей, причем цели могут быть подсвечены определенным статусом, причем для выстрела по цели и по команде оператору достаточно выделить курсором огневой расчет, с которого предполагается выстрел, или несколько огневых расчетов, курсором выбрать цель или цели и кликнуть команду «выстрел», причем никаких баллистических расчетов и поправок оператору делать не нужно, так как программа автоматически все просчитывает и использует, причем команду на выстрел оператор может задать не кликом, а привязать к какому-то происшествию, например по достижении целью какой-то скорости, какого-то расстояния, какого-то положения, или по факту какого-то действия, например отключения света.
8. Автоматизированный боевой комплекс по пп. 1-6, отличающийся тем, что позволяет вести бой в автоматическом режиме, без участия оператора, когда еще до начала боя на этапе подготовки и настройки программы оператор задает параметры целенаведения, а также параметры и алгоритмы ведения боя в автоматическом режиме, задаются условия перехода ведения боя на автоматический режим, причем при этом программа сама находит цели по заданным ранее параметрам, и сама уничтожает цели указанным ранее способом, причем переход на автоматическое ведение боя может произойти при прекращении связи с центром управления, или при сигнале «захват центра управления противником».
9. Автоматизированный боевой комплекс по пп. 1-6, отличающийся тем, что имеет панель управления, которая в стационарном исполнении представляет собой компьютерную систему, с набором мониторов, клавиатуры, манипулятора типа «мышки», и иные манипуляторы типа джойстики, причем панель управления может быть мобильной и представлять собой ноутбук, планшет, смартфон, соединенные с системой беспроводным образом, причем панелью управления типа смартфон или планшет может быть снаряжен боец, участвующий в боевых действиях, причем, используя средства дальней связи, панель управления может быть организована с любой точки земли, в том числе в браузерном варианте интерфейса, причем программой не ограничена возможность формировать любое количество панелей управления, причем для разных панелей управления может формироваться разный интерфейс, с разными функциональными возможностями, причем принципиальное и отдельное внимание уделяется защите от несанкционированных подключений к системе.
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЕДЕНИЕМ СНАЙПЕРСКОГО ОГНЯ | 2011 |
|
RU2474782C1 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ОГНЕМ РЕАКТИВНОЙ АРТИЛЛЕРИИ | 1998 |
|
RU2143133C1 |
| АВТОМАТИЗИРОВАННЫЙ ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ КОМПЛЕКС ОГНЕВОГО ПОРАЖЕНИЯ | 2008 |
|
RU2386920C2 |
| DE 102005047008 A1, 05.04.2007 | |||
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ БОЕВЫМИ СРЕДСТВАМИ | 2014 |
|
RU2598587C2 |

