Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации наземных целей (НЦ).
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ идентификации НЦ (см., например, патент РФ №2659090 от 28.06.2018 г. «Способ идентификации наземных целей»), который заключается в формировании радиолокационного изображения (РЛИ) участка земной поверхности (УЗП) с использованием бортовой РЛС в режиме синтезирования апертуры антенны (РСА) на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении, обнаружении целей на РЛИ УЗП в автоматическом режиме или с помощью оператора, косвенной оценке дальностей до обнаруженных наземных целей, формировании и передаче запросчиком РСАО кодированного запросного сигнала (совокупности импульсов расположенных на определенных в соответствии с действующим кодом временных позициях) в направлении центральной точки УЗП, приеме и обработке запросного сигнала ответчиком (ответчиками) РСАО НЦ, формировании и передаче ответчиком (ответчиками) РСАО НЦ кодированных ответных сигналов (совокупности импульсов расположенных на определенных в соответствии с действующим кодом временных позициях и несущих частотах), приеме импульсов на частотах ответного сигнала запросчиком РСАО, формировании принятого частотно-временного кода (ЧВК), формировании совокупности всех возможных векторов идентификационных признаков обнаруженных наземных целей, формировании эталонных моделей ЧВК, сравнении принятого ЧВК с эталонными моделями ЧВК, подсчете числа совпадений принятого ЧВК с каждой эталонной моделью ЧВК, формировании решения о векторе q* оценок идентификационных признаков обнаруженных наземных целей по критерию максимума совпадений эталонной модели ЧВК с принятым ЧВК, где  N - число обнаруженных наземных целей,
N - число обнаруженных наземных целей,  - оценка идентификационного признака (ИП) НЦ, q*=1 - НЦ оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы, q*=0 - НЦ не оборудована ответчиком РСАО, правильно отвечающим на запросный сигналы.
- оценка идентификационного признака (ИП) НЦ, q*=1 - НЦ оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы, q*=0 - НЦ не оборудована ответчиком РСАО, правильно отвечающим на запросный сигналы.
К недостаткам данного способа относится снижение достоверности идентификации НЦ в условиях многоцелевой обстановки (под идентификацией НЦ в данном случае понимается задача определения одного из двух ее идентификационных признаков: «НЦ оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы» или «НЦ не оборудована ответчиком РСАО, правильно отвечающим на запросный сигналы»). Одной из причин этого является то, что в условиях многоцелевой обстановки в пределах сектора неопределенности местонахождения ответчика РСАО могут одновременно находиться несколько наземных целей. В этой ситуации возможна ошибочная привязка идентификационного признака одной наземной цели к другой.
Техническим результатом изобретения является повышение достоверности идентификации НЦ в условиях многоцелевой обстановки.
Указанный результат достигается тем, что что в известном способе после формирования РЛИ УЗП измеряют в относительной системе координат OXYZ пространственные координаты Х10 первого воздушного судна, являющегося носителем бортовой РЛС, после обнаружения целей на РЛИ УЗП выбирают очередную наземную цель для идентификации в порядке их расположения на РЛИ УЗП при построчном просмотре слева направо сверху вниз, оценивают координаты ХЦ1 выбранной для идентификации наземной цели в связанной с первым воздушным судном системе координат O1X1Y1Z1, с учетом координат Х10 и ХЦ1 оценивают координаты ХЦ0 выбранной наземной цели в относительной системе координат OXYZ, после передачи запросчиком РСАО первого воздушного судна кодированного запросного сигнала в направлении центральной точки УЗП формируют информационное сообщение, содержащее момент времени tизл. излучения запросного сигнала и координаты Х10 и ХЦ0, и передают его на второе воздушное судно, взаимодействующее с первым воздушным судном при двухпозиционной идентификации выбранной наземной цели, с учетом величин, Х10 и ХЦ0 оценивают начальный t1H и конечный t1K моменты времени ожидания ответного сигнала на первом воздушном судне, принимают на втором воздушном судне информационное сообщение, переданное с первого воздушного судна, и выделяют переданную информацию, измеряют пространственные координаты Х20 второго воздушного судна в относительной системе координат OXYZ, с учетом величин ХЦ0 и Х20 ориентируют диаграмму направленности антенны запросчика РСАО второго воздушного судна в направлении наземной цели, с учетом величин tизл., ХЦ0, Х10 и Х20 оценивают начальный t2H и конечный t2K моменты времени ожидания ответного сигнала на втором воздушном судне, после передачи ответного сигнала ответчиком РСАО наземной цели принимают его на первом и втором воздушных судах и фиксируют соответствующие моменты времени его приема tпр.1 и tпp.2, на первом воздушном судне формируют оценку первого промежуточного идентификационного признака  при этом, если t1H≤tпр.1≤t1K, то формируют оценку
при этом, если t1H≤tпр.1≤t1K, то формируют оценку  в противном случае формируют оценку
в противном случае формируют оценку  на втором воздушном судне формируют оценку второго промежуточного идентификационного признака
на втором воздушном судне формируют оценку второго промежуточного идентификационного признака  при этом, если t2H≤tnp.2≤t2K, то формируют оценку
при этом, если t2H≤tnp.2≤t2K, то формируют оценку  в противном случае формируют оценку
в противном случае формируют оценку  , на втором воздушном судне формируют информационное сообщение, содержащее оценку
, на втором воздушном судне формируют информационное сообщение, содержащее оценку  и передают его на первое воздушное судно, на первом воздушном судне принимают данное сообщение и выделяют переданную информацию, на первом воздушном судне формируют итоговую оценку идентификационного признака выбранной наземной цели q* путем перемножения промежуточных оценок
и передают его на первое воздушное судно, на первом воздушном судне принимают данное сообщение и выделяют переданную информацию, на первом воздушном судне формируют итоговую оценку идентификационного признака выбранной наземной цели q* путем перемножения промежуточных оценок 
Сущность изобретения заключается в том, что итоговая оценка q* ИП НЦ формируется по результатам обработки кодированного ответного сигнала (сформированного и переданного ответчиком РСАО НЦ в ответ на кодированный запросный сигнал, сформированный и переданный запросчиком РСАО), прием которого осуществляется двумя разнесенными в пространстве запросчиками РСАО, установленными на двух взаимодействующих ВС. Это позволяет существенно уменьшить сектор неопределенности местонахождения ответчика РСАО и, как следствие, повысить достоверность идентификации наземной цели в условиях многоцелевой обстановки.
Уменьшение сектора ΔS (где ΔS - сектор неопределенности местонахождения ответчика РСАО при двухпозиционной идентификации наземной цели) объясняется тем, что его размеры определяются только областью пересечения секторов ΔS1 и ΔS2 (где ΔS1 - сектор неопределенности местонахождения ответчика РСАО относительно первого воздушного судна, ΔS2 - сектор неопределенности местонахождения ответчика РСАО относительно второго воздушного судна). При этом размеры сектора ΔS зависят от угла  между взаимодействующими воздушными судами относительно наземной цели. Увеличение угла
между взаимодействующими воздушными судами относительно наземной цели. Увеличение угла  в пределах от 0° до 90° приводит к уменьшению сектора ΔS, а следовательно к повышению достоверности идентификации наземной цели при двухпозиционной идентификации в условиях многоцелевой обстановки.
в пределах от 0° до 90° приводит к уменьшению сектора ΔS, а следовательно к повышению достоверности идентификации наземной цели при двухпозиционной идентификации в условиях многоцелевой обстановки.
Данный способ включает в себя следующие этапы:
1. На борту первого ВС, являющегося носителем бортовой РЛС:
1.1. Формирование РЛИ УЗП с использованием РСА (бортовой РЛС в режиме синтезирования апертуры антенны) на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении;
1.2. Измерение пространственных координат X10=[x10,y10,z10] первого ВС в относительной системе координат OXYZ (OXYZ - правая прямоугольная система координат с началом в точке О, совмещенной с аэродромом базирования первого и второго воздушных судов, оси ОХ и OY лежат в плоскости, касательной к земной поверхности в точке О, при этом ось ОХ направлена на север, ось OZ перпендикулярно к плоскости OXY);
1.3. Обнаружение наземных целей на РЛИ УЗП;
1.4 Выбор очередной НЦ для идентификации в порядке их расположения на РЛИ УЗП при построчном просмотре слева направо сверху вниз;
1.5 Оценка координат XЦ1=[xЦ1,yЦ1,zЦ1] выбранной для идентификации наземной цели в связанной с первым ВС системе координат O1X1Y1Z1 (O1X1Y1Z1 - правая прямоугольная система координат с началом в точке О1, совмещенной с центром масс первого воздушного судна, направление осей О1Х1, O1Y1 и O1Z1 совпадает с направлениями осей ОХ, OY и OZ соответственно);
1.6. Оценка координат  выбранной для идентификации НЦ в относительной системе координат в соответствии с выражением
выбранной для идентификации НЦ в относительной системе координат в соответствии с выражением

1.7. Формирование и передача запросчиком РСАО первого ВС кодированного запросного сигнала (совокупности импульсов, расположенных на определенных в соответствии с действующим кодом временных позициях) в направлении центральной точки УЗП РЛИ;
1.8. Формирование и передача с первого ВС на второе ВС по каналу обмена данными информационного сообщения, содержащего момент времени излучения запросного сигнала, координаты первого ВС Х10 и НЦ ХЦ0;
1.9. Оценка начального t1H и конечного t1K моментов времени ожидания ответного сигнала на первом ВС в соответствии с выражениями:


где ΔД1 - ошибка оценки дальности до НЦ относительно первого ВС;
2. На борту второго ВС, взаимодействующего с первым ВС при двухпозиционной идентификации НЦ:
2.1. Прием и обработка информационного сообщения, переданного с борта первого ВС, с выделением информации о моменте времени tизл. излучения запросного сигнала, координатах первого ВС Х10 и НЦ ХЦ0;
2.2. Измерение пространственных координат  второго ВС в относительной системе координат OXYZ;
второго ВС в относительной системе координат OXYZ;
2.3. Ориентирование диаграммы направленности антенны запросчика РСАО второго ВС в направлении НЦ;
2.4. Оценка начального t2H и конечного t2K моментов времени ожидания ответного сигнала на втором ВС в соответствии с выражениями:

где ΔД2 - ошибка оценки дальности до НЦ относительно второго ВС;
3. На НЦ, находящейся в зоне действия запросного сигнала и являющейся носителем ответчика РСАО:
3.1. Прием и обработка запросного сигнала ответчиком РСАО НЦ;
3.2. Формирование и передача через ненаправленную антенну кодированного ответного сигнала (совокупность импульсов, излучаемых на несущих частотах и временных позициях, определяемых действующим кодом) ответчиком РСАО НЦ;
4. На борту первого ВС:
4.1. Прием и обработка кодированного ответного сигнала с фиксацией момента времени tпр.1 его приема на первом ВС;
4.2. Формирование оценки промежуточного ИП НЦ относительно первого ВС (первого промежуточного ИП НЦ  ) в соответствии с выражением
) в соответствии с выражением

5. На борту второго ВС:
5.1. Прием и обработка ответного сигнала с фиксацией момента времени tпр.2 его приема на втором ВС;
5.2. Формирование оценки промежуточного ИП НЦ относительно второго ВС (второго промежуточного ИП НЦ  ) в соответствии с выражением
) в соответствии с выражением

5.3. Формирование и передача информационного сообщения, содержащего оценку второго промежуточного ИП НЦ  , с борта второго ВС на первое ВС;
, с борта второго ВС на первое ВС;
6. На борту первого ВС:
6.1. Прием и обработка информационного сообщения, переданного с борта второго ВС, с выделением информации об оценке второго промежуточного ИП НЦ  ;
;
6.2. Формирование итоговой оценки ИП НЦ q* в соответствии с выражением

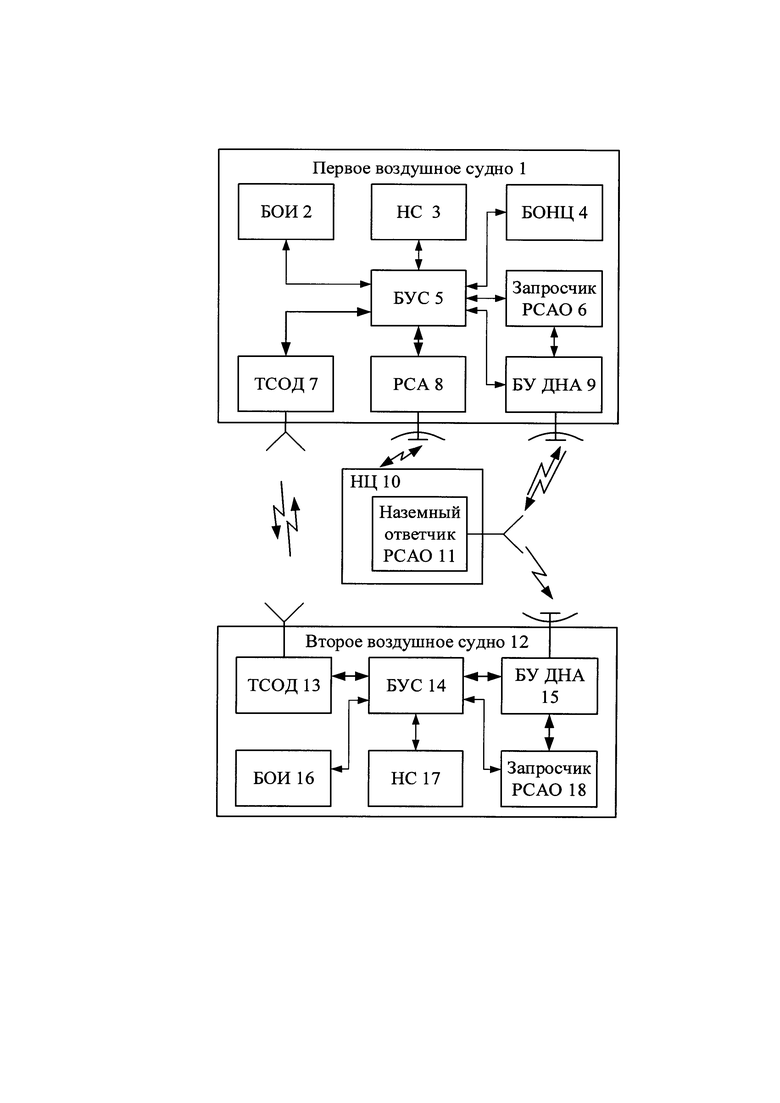
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на фигуре, где обозначено: 1 - первое ВС (носитель бортовой РЛС); 2 - блок обработки информации (БОИ); 3 - навигационная система (НС); 4 - блок обнаружения наземных целей (БОНЦ); 5 - блок управления и согласования (БУС); 6 - запросчик РСАО; 7 - терминал системы обмена данными (ТСОД); 8 - Бортовая РЛС с синтезированной апертурой антенны (РСА); 9 - блок управления диаграммой направленности антенны (БУ ДНА); 10 - наземная цель (НЦ), являющаяся носителем ответчика РСАО; 11 - наземный ответчик РСАО; 12 - второе воздушное судно; 13 - ТСОД; 14 - БУС; 15 - БУ ДНА; 16 - БОИ; 17 - НС; 18 -запросчик РСАО.
БОИ 2, НС 3, БОНЦ 4, БУС 5, запросчик РСАО 6, ТСОД 7, РСА 8 и БУ ДНА 9 размещаются на первом воздушном судне 1. Наземный ответчик РСАО 11 размещается на НЦ 10. ТСОД 13, БУС 14, БУ ДНА 15, БОИ 16, НС 17 и запросчик РСАО 18 размещаются на втором воздушном судне.
БОИ 2 предназначен для оценки координат выбранной для идентификации НЦ в относительной системе координат ХЦ0, для оценки начального t1H и конечного t1K моментов времени ожидания ответного сигнала на первом ВС, для оценки первого ИП НЦ  и для формирования итоговой оценки ИП НЦ q*. НС 3 предназначена для измерения пространственных координат Х10 первого ВС в относительной системе координат OXYZ. БОНЦ 4 предназначен для обнаружения целей на РЛИ УЗП, выбора цели для идентификации и оценки ее координат ХЦ1=[хЦ1, yЦ1, yЦ1] в связанной с первым ВС системе координат O1X1Y1Z1. БУС 5 предназначен для управления устройствами комплекса и их согласования на первом ВС. Запросчик РСАО 6 предназначен для формирования и передачи кодированного запросного сигнала (совокупности импульсов расположенных на определенных в соответствии с действующим кодом временных позициях) в направлении центральной точки УЗП РЛИ, а также для приема и обработки кодированного ответного сигнала с фиксацией момента времени tпр.1 его приема на первом ВС. ТСОД 7 предназначен для формирования и передачи с первого ВС на второе ВС по каналу обмена данными информационного сообщения, содержащего момент времени tизл. излучения запросного сигнала, координаты первого ВС Х10 и НЦ ХЦ0, а также для приема и обработки информационного сообщения, переданного с борта второго ВС, с выделением информации об оценке второго промежуточного ИП НЦ
и для формирования итоговой оценки ИП НЦ q*. НС 3 предназначена для измерения пространственных координат Х10 первого ВС в относительной системе координат OXYZ. БОНЦ 4 предназначен для обнаружения целей на РЛИ УЗП, выбора цели для идентификации и оценки ее координат ХЦ1=[хЦ1, yЦ1, yЦ1] в связанной с первым ВС системе координат O1X1Y1Z1. БУС 5 предназначен для управления устройствами комплекса и их согласования на первом ВС. Запросчик РСАО 6 предназначен для формирования и передачи кодированного запросного сигнала (совокупности импульсов расположенных на определенных в соответствии с действующим кодом временных позициях) в направлении центральной точки УЗП РЛИ, а также для приема и обработки кодированного ответного сигнала с фиксацией момента времени tпр.1 его приема на первом ВС. ТСОД 7 предназначен для формирования и передачи с первого ВС на второе ВС по каналу обмена данными информационного сообщения, содержащего момент времени tизл. излучения запросного сигнала, координаты первого ВС Х10 и НЦ ХЦ0, а также для приема и обработки информационного сообщения, переданного с борта второго ВС, с выделением информации об оценке второго промежуточного ИП НЦ  . РСА 8 предназначена для формирования РЛИ УЗП на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении. БУ ДНА 9 предназначен для управления диаграммой направленности запросчика РСАО 6. Наземный ответчик РСАО 11 предназначен для приема и обработка кодированного запросного сигнала, а также для формирования и передачи через ненаправленную антенну кодированного ответного сигнала (совокупности импульсов, излучаемых на несущих частотах и временных позициях, определяемых действующим кодом). ТСОД 13 предназначен для приема и обработки информационного сообщения, переданного с борта первого ВС, с выделением информации, содержащей момент времени tизл. излучения запросного сигнала, координаты первого ВС Х10 и НЦ ХЦ0, а также для формирования и передачи информационного сообщения, содержащего оценку второго промежуточного ИП НЦ
. РСА 8 предназначена для формирования РЛИ УЗП на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении. БУ ДНА 9 предназначен для управления диаграммой направленности запросчика РСАО 6. Наземный ответчик РСАО 11 предназначен для приема и обработка кодированного запросного сигнала, а также для формирования и передачи через ненаправленную антенну кодированного ответного сигнала (совокупности импульсов, излучаемых на несущих частотах и временных позициях, определяемых действующим кодом). ТСОД 13 предназначен для приема и обработки информационного сообщения, переданного с борта первого ВС, с выделением информации, содержащей момент времени tизл. излучения запросного сигнала, координаты первого ВС Х10 и НЦ ХЦ0, а также для формирования и передачи информационного сообщения, содержащего оценку второго промежуточного ИП НЦ  , с борта второго ВС на первое ВС.БУС 14 предназначен для управления устройствами комплекса и их согласования на втором ВС.БУ ДНА запросчика РСАО 15 предназначен для ориентирования ДНА запросчика второго ВС в направлении НЦ. БОИ 16 предназначен для оценки начального t2H и конечного t2K моментов времени ожидания ответного сигнала на втором ВС, а также для формирования оценки второго промежуточного ИП НЦ
, с борта второго ВС на первое ВС.БУС 14 предназначен для управления устройствами комплекса и их согласования на втором ВС.БУ ДНА запросчика РСАО 15 предназначен для ориентирования ДНА запросчика второго ВС в направлении НЦ. БОИ 16 предназначен для оценки начального t2H и конечного t2K моментов времени ожидания ответного сигнала на втором ВС, а также для формирования оценки второго промежуточного ИП НЦ  . НС 17 предназначена для измерения пространственных координат Х20=[х20,y20,z20] второго ВС в относительной системе координат OXYZ. Запросчик РСАО 18 предназначен для приема и обработки кодированного ответного сигнала с фиксацией момента времени tпр2 его приема на втором ВС.
. НС 17 предназначена для измерения пространственных координат Х20=[х20,y20,z20] второго ВС в относительной системе координат OXYZ. Запросчик РСАО 18 предназначен для приема и обработки кодированного ответного сигнала с фиксацией момента времени tпр2 его приема на втором ВС.
Комплекс устройств работает следующим образом.
На борту первого ВС.БУС 5 управляет устройствами комплекса и согласовывает их функционирование на первом ВС. РСА 8 формирует РЛИ УЗП на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении. РЛИ УЗП через БУС 5 поступает на БОНЦ 4. НС 3 измеряет пространственные координаты Х10 первого ВС в относительной системе координат OXYZ, которые через БУС 5 поступают в БОИ 2, БОНЦ 4 и ТСОД 7. БОНЦ 4 обнаруживает цели на РЛИ УЗП, выбирает цель для идентификации и оценивает ее координаты Х Ц1=[хЦ1, yЦ1, zЦ1] в связанной с первым ВС системе координат O1X1Y1Z1, которые через БУС 5 поступают на БОИ 2 и БУ ДНА 9. БОИ 2 оценивает координаты ХЦ0 выбранной для идентификации НЦ в относительной системе координат OXYZ в соответствии с выражением (1), информация о которых поступает через БУС 5 в ТСОД 7. Запросчик РСАО 9 формирует кодированный запросный сигнал, который проходя через БУ ДНА 9 излучается в направлении центральной точки УЗП РЛИ. Информация о моменте времени tизл. излучения запросного сигнала поступает через БУС 5 в ТСОД 7. ТСОД 7 формирует и передает с первого ВС на второе ВС информационное сообщение, содержащее момент времени tизл. излучения запросного сигнала, координаты первого ВС Х10 и НЦ ХЦ0. БОИ 2 оценивает начальный t1H и конечный t1K моменты времени ожидания ответного сигнала на первом ВС в соответствии с выражениями (2) и (3).
На борту второго ВС. БУС 14 управляет устройствами комплекса и согласовывает их на втором ВС. ТСОД 13 принимает и обрабатывает информационное сообщение, переданное с борта первого ВС, с выделением информации о моменте времени tизл. излучения запросного сигнала, координатах первого ВС Х10 и НЦ ХЦ0. Данная информация через БУС 14 поступает на БОИ 16, кроме этого информация о координатах НЦ ХЦ0 через БУС 14 поступает на БУ ДНА 15. НС 17 измеряет пространственные координаты Х20=[х20, y20, z20] второго ВС в относительной системе координат OXYZ, информация о которых поступает через БУС 14 на БОИ 16 и БУ ДНА 15. БУ ДНА 15 ориентирует ДНА запросчика РСАО 18 второго ВС в направлении НЦ. БОИ 16 оценивает начальный t2H и конечный t2K моменты времени ожидания ответного сигнала на втором ВС в соответствии с выражениями (4) и (5).
На НЦ, являющейся носителем ответчика РСАО. Наземный ответчик РСАО 11 принимает и обрабатывает кодированный запросный сигнал, а также формирует и передает через ненаправленную антенну кодированный ответный сигнал (совокупность импульсов, излучаемых на несущих частотах и временных позициях, определяемых действующим кодом).
На борту первого ВС. Запросчик РСАО 6 принимает и обрабатывает кодированный ответный сигнал с фиксацией момента времени tпр.1 его приема, информация о котором через БУС 5 поступает в БОИ 2. БОИ 2 формирует оценку первого промежуточного ИП НЦ  в соответствии с выражением (6).
в соответствии с выражением (6).
На борту второго ВС. Запросчик РСАО 18 принимает и обрабатывает кодированный ответный сигнал с фиксацией момента времени tпр. 2 его приема, информация о котором через БУС 14 поступает в БОИ 16. БОИ 16 формирует оценку второго промежуточного ИП НЦ  в соответствии с выражением (7), информация о которой через БУС 14 поступает в ТСОД 13. ТСОД 13 формирует и передает информационное сообщение, содержащее оценку второго промежуточного ИП НЦ
в соответствии с выражением (7), информация о которой через БУС 14 поступает в ТСОД 13. ТСОД 13 формирует и передает информационное сообщение, содержащее оценку второго промежуточного ИП НЦ  , с борта второго ВС на первое ВС.
, с борта второго ВС на первое ВС.
На борту первого ВС.ТСОД 7 принимает и обрабатывает информационное сообщение, переданное с борта второго ВС, с выделением информации об оценке второго ИП НЦ  , которая через БУС 5 поступает в БОИ 2. БОИ 2 формирует итоговую оценку ИП НЦ q* в соответствии с выражением (8).
, которая через БУС 5 поступает в БОИ 2. БОИ 2 формирует итоговую оценку ИП НЦ q* в соответствии с выражением (8).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ идентификации наземной цели, в котором итоговая оценка ее идентификационного признака формируется по результатам обработки ответного сигнала, прием которого осуществляется двумя разнесенными в пространстве запросчиками РСАО, установленными на двух взаимодействующих воздушных судах.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что если итоговой оценку ИП НЦ формировать по результатам обработки ответного сигнала, прием которого осуществлять Х20=[х20,y20,z20] двумя разнесенными в пространстве запросчиками РСАО, установленными на двух взаимодействующих воздушных судах, то это приведет к повышению достоверности идентификации НЦ в условиях многоцелевой обстановки.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2020 |
|
RU2741613C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791599C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2016 |
|
RU2659090C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2024 |
|
RU2831760C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2014 |
|
RU2567243C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2023 |
|
RU2809767C1 |
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНОЙ ЦЕЛИ | 2018 |
|
RU2708078C1 |
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791600C1 |
| Способ прямой идентификации воздушных целей | 2018 |
|
RU2701721C1 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации наземных целей. Техническим результатом изобретения является повышение достоверности идентификации наземной цели в условиях многоцелевой обстановки. В заявленном способе итоговая оценка идентификационного признака наземной цели формируется по результатам обработки кодированного ответного сигнала, сформированного и переданного ответчиком радиолокационной системы с активным ответом (РСАО) наземной цели в ответ на кодированный запросный сигнал, сформированный и переданный запросчиком РСАО, прием которого осуществляется двумя разнесенными в пространстве запросчиками РСАО, установленными на двух взаимодействующих воздушных судах. Это позволяет существенно уменьшить сектор неопределенности местонахождения ответчика РСАО и, как следствие, повысить достоверность идентификации наземной цели в условиях многоцелевой обстановки. 1 ил.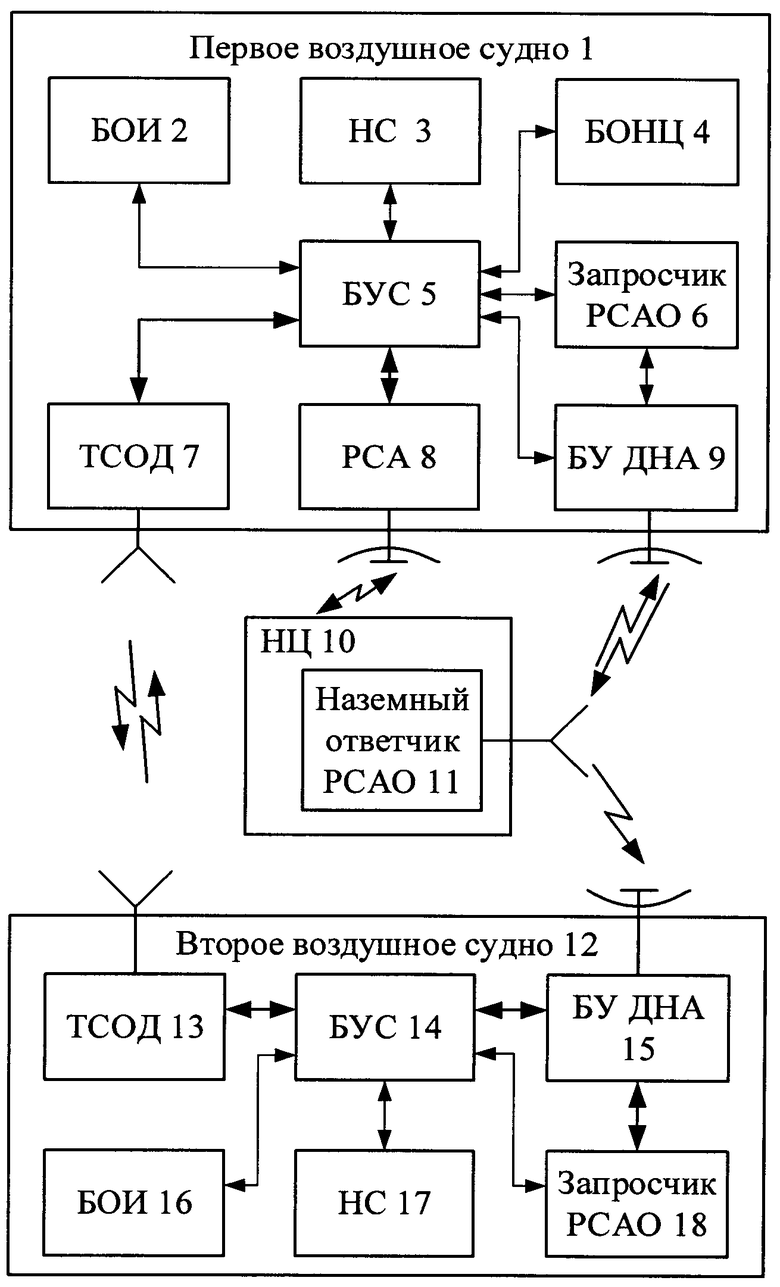
Способ двухпозиционной идентификации наземной цели, основанный на формировании радиолокационного изображения (РЛИ) участка земной поверхности (УЗП) с использованием бортовой РЛС в режиме синтезирования апертуры антенны на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении, обнаружении наземных целей на РЛИ УЗП, формировании и передаче запросчиком радиолокационной системы с активным ответом (РСАО) кодированного запросного сигнала в направлении центральной точки УЗП, приеме и обработке данного запросного сигнала ответчиками РСАО наземных целей, находящимися в зоне действия запросного сигнала, формировании и передаче кодированных ответных сигналов данными ответчиками РСАО, отличающийся тем, что после формирования РЛИ УЗП измеряют в относительной системе координат OXYZ пространственные координаты Х10 первого воздушного судна, являющегося носителем бортовой РЛС, после обнаружения целей на РЛИ УЗП выбирают очередную наземную цель для идентификации в порядке их расположения на РЛИ УЗП при построчном просмотре слева направо сверху вниз, оценивают координаты ХЦ1 выбранной для идентификации наземной цели в связанной с первым воздушным судном системе координат O1X1Y1Z1, с учетом координат Х10 и ХЦ1 оценивают координаты ХЦ0 выбранной наземной цели в относительной системе координат OXYZ, после передачи запросчиком РСАО первого воздушного судна кодированного запросного сигнала в направлении центральной точки УЗП формируют информационное сообщение, содержащее момент времени tизл. излучения запросного сигнала и координаты Х10 и ХЦ0, и передают его на второе воздушное судно, взаимодействующее с первым воздушным судном при двухпозиционной идентификации выбранной наземной цели, с учетом величин tизл., Х10 и ХЦ0 оценивают начальный t1H и конечный t1K моменты времени ожидания ответного сигнала на первом воздушном судне, принимают на втором воздушном судне информационное сообщение, переданное с первого воздушного судна, и выделяют переданную информацию, измеряют пространственные координаты Х20 второго воздушного судна в относительной системе координат OXYZ, с учетом величин ХЦ0 и Х20 ориентируют диаграмму направленности антенны запросчика РСАО второго воздушного судна в направлении наземной цели, с учетом величин tизл., ХЦ0, Х10 и Х20 оценивают начальный t2H и конечный t2K моменты времени ожидания ответного сигнала на втором воздушном судне, после передачи ответного сигнала ответчиком РСАО наземной цели принимают его на первом и втором воздушных судах и фиксируют соответствующие моменты времени его приема tпр.1 и tпр.2, на первом воздушном судне формируют оценку первого промежуточного идентификационного признака  при этом, если tlH≤tпр.l≤t1K, то формируют оценку
при этом, если tlH≤tпр.l≤t1K, то формируют оценку  в противном случае формируют оценку
в противном случае формируют оценку  на втором воздушном судне формируют оценку второго промежуточного идентификационного признака
на втором воздушном судне формируют оценку второго промежуточного идентификационного признака  при этом, если t2H≤tnp2≤t2K, то формируют оценку
при этом, если t2H≤tnp2≤t2K, то формируют оценку  , в противном случае формируют оценку
, в противном случае формируют оценку  , на втором воздушном судне формируют информационное сообщение, содержащее оценку
, на втором воздушном судне формируют информационное сообщение, содержащее оценку  и передают его на первое воздушное судно, на первом воздушном судне принимают данное сообщение и выделяют переданную информацию, на первом воздушном судне формируют итоговую оценку идентификационного признака выбранной наземной цели q* путем перемножения промежуточных оценок
и передают его на первое воздушное судно, на первом воздушном судне принимают данное сообщение и выделяют переданную информацию, на первом воздушном судне формируют итоговую оценку идентификационного признака выбранной наземной цели q* путем перемножения промежуточных оценок  где
где  - наземная цель оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы, q*=0 - наземная цель не оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы.
- наземная цель оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы, q*=0 - наземная цель не оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы.
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2016 |
|
RU2659090C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2020 |
|
RU2741613C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПОЗНАВАНИЯ С ОБЕСПЕЧЕНИЕМ ВОЗМОЖНОСТИ УСТАНОВЛЕНИЯ ПОДЛИННОСТИ ЗАПРОСНОГО СИГНАЛА | 2002 |
|
RU2242020C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ВОЗДУШНЫХ ОБЪЕКТОВ ПРИ ПАССИВНОЙ БИСТАТИЧЕСКОЙ РАДИОЛОКАЦИИ | 2012 |
|
RU2504797C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ ПРИ ПАССИВНОЙ БИСТАТИЧЕСКОЙ РАДИОЛОКАЦИИ | 2001 |
|
RU2196342C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И СПОСОБ ОПРЕДЕЛЕНИЯ И ФОРМИРОВАНИЯ ДЕЙСТВУЮЩИХ ЗАПРОСНЫХ СИГНАЛОВ | 2000 |
|
RU2208812C2 |
| WO 2014011264 A2, 16.01.2014 | |||
| US 5767802 A, 16.06.1998 | |||
| US 2017011634 A1, 12.01.2017. | |||
