Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации наземных целей.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ идентификации наземных целей (см., например, патент РФ №2659090 от 28.06.2018 г. «Способ идентификации наземных целей»), который заключается в формировании радиолокационного изображения (РЛИ) участка земной поверхности (УЗП) с использованием бортовой РЛС в режиме синтезирования апертуры антенны (РСА) на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении, обнаружении целей на РЛИ УЗП в автоматическом режиме или с помощью оператора, косвенной оценке дальностей до обнаруженных наземных целей, формировании и передаче запросчиком РСАО кодированного запросного сигнала (совокупности импульсов расположенных на определенных в соответствии с действующим кодом временных позициях) в направлении центральной точки УЗП, приеме и обработке запросного сигнала ответчиком (ответчиками) РСАО наземных целей, формировании и передаче ответчиком (ответчиками) РСАО наземных целей кодированных ответных сигналов (совокупности импульсов расположенных на определенных в соответствии с действующим кодом временных позициях и несущих частотах), приеме импульсов на частотах ответного сигнала запросчиком РСАО, формировании принятого частотно-временного кода (ЧВК), формировании совокупности всех возможных векторов идентификационных признаков обнаруженных наземных целей, формировании эталонных моделей ЧВК, сравнении принятого ЧВК с эталонными моделями ЧВК, подсчете числа совпадений принятого ЧВК с каждой эталонной моделью ЧВК, формировании решения о векторе q* оценок идентификационных признаков обнаруженных наземных целей по критерию максимума совпадений эталонной модели ЧВК с принятым ЧВК, где  N - число обнаруженных наземных целей, q*∈[0,1] - оценка идентификационного признака наземной цели, q*=1 - наземная цель оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы, q*=0 - наземная цель не оборудована ответчиком РСАО, правильно отвечающим на запросный сигналы.
N - число обнаруженных наземных целей, q*∈[0,1] - оценка идентификационного признака наземной цели, q*=1 - наземная цель оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы, q*=0 - наземная цель не оборудована ответчиком РСАО, правильно отвечающим на запросный сигналы.
К недостаткам данного способа относится снижение вероятности правильной идентификации наземных целей в условиях необнаружения бортовой РЛС отдельных наземных целей, оборудованных ответчиком РСАО (под идентификацией наземной цели в данном случае понимается задача определения одного из двух ее идентификационных признаков: «НЦ оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы» или «НЦ не оборудована ответчиком РСАО, правильно отвечающим на запросный сигналы»). Причиной необнаружения отдельных воздушных целей может быть, например, их низкая эффективная площадь отражения. Снижение вероятности правильной идентификации наземных целей в условиях необнаружения бортовой РЛС отдельных наземных целей, оборудованных ответчиком РСАО, объясняется следующим. Импульсы ответных сигналов необнаруженных бортовой РЛС наземных целей, оборудованных ответчиком РСАО, не будут соответствовать обнаруженным наземным целям по дальности и действующему коду. Это будет приводить к уменьшению числа совпадений принятого ЧВК и эталонной модели ЧВК истинного вектора идентификационных признаков обнаруженных наземных целей, и как следствие, к снижению вероятности их правильной идентификации.
Техническим результатом изобретения является повышение вероятности правильной идентификации наземных целей.
Указанный результат достигается тем, что в известном способе идентификации после этапа формирования эталонных моделей ЧВК определяют частные признаки соответствия или несоответствия принятых импульсов ответного сигнала для каждой n-й наземной цели по дальности и действующему коду, с использованием данных частных признаков определяют общие признаки соответствия или несоответствия принятых импульсов ответных сигналов по дальности и действующему коду обнаруженным на РЛИ УЗП наземным целям, с использованием данных общих признаков формируют модернизированный ЧВК путем исключения из принятого ЧВК моментов времени обнаружения импульсов ответных сигналов, которые не соответствуют по дальности и действующему коду обнаруженным наземным целям, сравнивают модернизированный ЧВК с эталонными моделями ЧВК, подсчитывают для каждой эталонной модели число совпадений с модернизированным ЧВК, в качестве вектора итоговых оценок идентификационных признаков обнаруженных наземных целей принимают такой вектор из совокупности всех возможных векторов идентификационных признаков обнаруженных наземных целей, которому соответствует эталонная модель ЧВК с наибольшим числом совпадений с модернизированным ЧВК.
Сущность изобретения заключается в том, что в качестве вектора итоговых оценок идентификационных признаков обнаруженных наземных целей принимается вектор из совокупности всех возможных векторов идентификационных признаков обнаруженных наземных целей, которому соответствует эталонная модель ЧВК с наибольшим числом совпадений с модернизированным ЧВК, который в свою очередь формируется из принятого ЧВК путем исключения моментов времени обнаружения импульсов ответных сигналов, не соответствующих по дальности и действующему коду обнаруженным наземным целям. Это приводит к увеличению числа совпадений модернизированного ЧВК с эталонной моделью ЧВК истинного вектора идентификационных признаков обнаруженных наземных целей и, как следствие, приводит к повышению вероятности правильной идентификации наземных целей.
Данный способ включает в себя следующие этапы:
1. Формирование РЛИ УЗП с использованием РСА (бортовой РЛС в режиме синтезирования апертуры антенны) на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении;
2. Обнаружение N наземных целей на РЛИ УЗП и определение их координат  где
где  xn и yn - координаты n-й обнаруженной наземной цели в правой прямоугольной системе координат OXY лежащей в плоскости, касательной к земной поверхности в точке О (О - центральная точка анализируемого УЗП); ось OY лежит на пересечении плоскости, касательной к земной поверхности в точке О, и перпендикулярной к ней плоскости, проходящей через отрезок OR (R - центральная точка раскрыва антенны бортовой РЛС); ось OY направлена в сторону от носителя бортовой РЛС;
xn и yn - координаты n-й обнаруженной наземной цели в правой прямоугольной системе координат OXY лежащей в плоскости, касательной к земной поверхности в точке О (О - центральная точка анализируемого УЗП); ось OY лежит на пересечении плоскости, касательной к земной поверхности в точке О, и перпендикулярной к ней плоскости, проходящей через отрезок OR (R - центральная точка раскрыва антенны бортовой РЛС); ось OY направлена в сторону от носителя бортовой РЛС;
3. Косвенная оценка дальностей  до обнаруженных наземных целей в соответствии с выражением
до обнаруженных наземных целей в соответствии с выражением

где Dn - дальность до n-й обнаруженной наземной цели, где  h - высота полета идентифицирующего объекта; β - угол между плоскостью, касательной к земной поверхности в точке О и отрезком OR;
h - высота полета идентифицирующего объекта; β - угол между плоскостью, касательной к земной поверхности в точке О и отрезком OR;
4. Формирование и передача запросчиком РСАО кодированного запросного сигнала (совокупности импульсов, расположенных на определенных в соответствии с действующим кодом временных позициях) в направлении центральной точки УЗП РЛИ;
5. Прием и обработка запросного сигнала р-ми ответчиками, где  Р - число оборудованных ответчиком РСАО наземных целей, находящихся в зоне действия запросного сигнала;
Р - число оборудованных ответчиком РСАО наземных целей, находящихся в зоне действия запросного сигнала;
6. Формирование и передача р-ми ответчиками кодированных ответных сигналов (совокупности импульсов, расположенных на определенных в соответствии с действующим кодом временных позициях и несущих частотах);
7. Прием импульсов на частотах ответного сигнала запросчиком РСАО;
8. Фиксация моментов обнаружения импульсов на несущих частотах ответного сигнала tiƒ, где I - число принятых импульсов ответного сигнала на ƒ-й частоте,
I - число принятых импульсов ответного сигнала на ƒ-й частоте,  F - число несущих частот ответного сигнала;
F - число несущих частот ответного сигнала;
9. Формирование принятого ЧВК  как совокупности моментов времени обнаружения импульсов на несущих частотах ответного сигнала;
как совокупности моментов времени обнаружения импульсов на несущих частотах ответного сигнала;
10. Формирование совокупности всех возможных векторов идентификационных признаков обнаруженных наземных целей в соответствии с выражением

где  K=2N - число возможных векторов идентификационных признаков наземных целей, SN (х) - функция отображения числа x в двоичной форме с N разрядами;
K=2N - число возможных векторов идентификационных признаков наземных целей, SN (х) - функция отображения числа x в двоичной форме с N разрядами;
11. Формирование эталонной модели ЧВК  для каждого k в соответствии с выражением
для каждого k в соответствии с выражением

где τ - длительность импульса ответного сигнала, jƒ∈[1,J] - номер временной позиции (временного интервала), на которой должен быть импульс ответного сигнала на ƒ-й частоте в соответствии с действующим кодом, J - число временных позиций, на которых может быть импульс ответного сигнала;  - дальность до наземной цели, соответствующей номеру
- дальность до наземной цели, соответствующей номеру  , Bk - число элементов q=1 в векторе qk, D0 - дальность до ближайшей наземной цели;
, Bk - число элементов q=1 в векторе qk, D0 - дальность до ближайшей наземной цели;
12. Определение для каждых i, ƒ и n частного признака χiƒn соответствия или несоответствия принятого в момент времени tiƒ импульса ответного сигнала n-й наземной цели по дальности и действующему коду в соответствии с выражением

где χiƒn=1 - частный признак соответствия принятого в момент времени tiƒ импульса ответного сигнала n-й наземной цели по дальности и действующему коду; χiƒn=0 - частный признак несоответствия принятого в момент времени tiƒ импульса ответного сигнала n-й наземной цели по дальности и действующему коду; tЗС - момент времени излучения запросного сигнала; τВП - длительность временной позиции для одного импульса ответного сигнала;
13. Определение для каждых i, ƒ общего признака χiƒ соответствия или несоответствия принятого в момент времени tiƒ импульса ответного сигнала по дальности и действующему коду обнаруженным на РЛИ УЗП наземным целям в соответствии с выражением

где χiƒ=1 - общий признак соответствия принятого в момент времени tiƒ импульса ответного сигнала какой-либо обнаруженной на РЛИ УЗП наземной цели по дальности и действующему коду; χiƒ=0 - общий признак несоответствия принятого в момент времени tiƒ импульса ответного сигнала ни одной из обнаруженных на РЛИ УЗП наземных целей по дальности и действующему коду;
14. Формирование модернизированного ЧВК  в соответствии с выражением
в соответствии с выражением

Согласно выражению (6), модернизированный ЧВК  формируется из принятого ЧВК
формируется из принятого ЧВК  путем исключения из него моментов времени обнаружения импульсов ответных сигналов, которые не соответствуют по дальности и действующему коду обнаруженным наземным целям;
путем исключения из него моментов времени обнаружения импульсов ответных сигналов, которые не соответствуют по дальности и действующему коду обнаруженным наземным целям;
15. Сравнение модернизированного ЧВК  с k-ми эталонными моделями ЧВК
с k-ми эталонными моделями ЧВК  в соответствии с выражением
в соответствии с выражением

где величина gjƒbk принимает значение gjƒbk=1 в том, случае, если выполняется условие  принадлежности момента tζƒ любому из интервалов Δtjƒbk, входящих в совокупность
принадлежности момента tζƒ любому из интервалов Δtjƒbk, входящих в совокупность  , в противном случае величина gjƒbk принимает значение
, в противном случае величина gjƒbk принимает значение  - интервал времени с началом в точке tjƒbk и окончанием в точке tjƒbk+Δt; Δt=ΔD1/с - ошибка определения эталонной модели ЧВК
- интервал времени с началом в точке tjƒbk и окончанием в точке tjƒbk+Δt; Δt=ΔD1/с - ошибка определения эталонной модели ЧВК  , ΔD - ошибка определения дальности до наземной цели;
, ΔD - ошибка определения дальности до наземной цели;
16. Подсчет для каждого k числа Gk совпадений модернизированного ЧВК  с k-й эталонной моделью ЧВК
с k-й эталонной моделью ЧВК  в соответствии с выражением
в соответствии с выражением

17. Формирование решения о векторе q* итоговых оценок идентификационных признаков обнаруженных наземных целей в соответствии с выражением

В соответствии с выражением (9), в качестве вектора q* итоговых оценок идентификационных признаков обнаруженных наземных целей принимается вектор  из совокупности
из совокупности  всех возможных векторов идентификационных признаков обнаруженных наземных целей, которому соответствует эталонная модель ЧВК
всех возможных векторов идентификационных признаков обнаруженных наземных целей, которому соответствует эталонная модель ЧВК  с наибольшим числом совпадений
с наибольшим числом совпадений  с модернизированным ЧВК
с модернизированным ЧВК  , где
, где  .
.
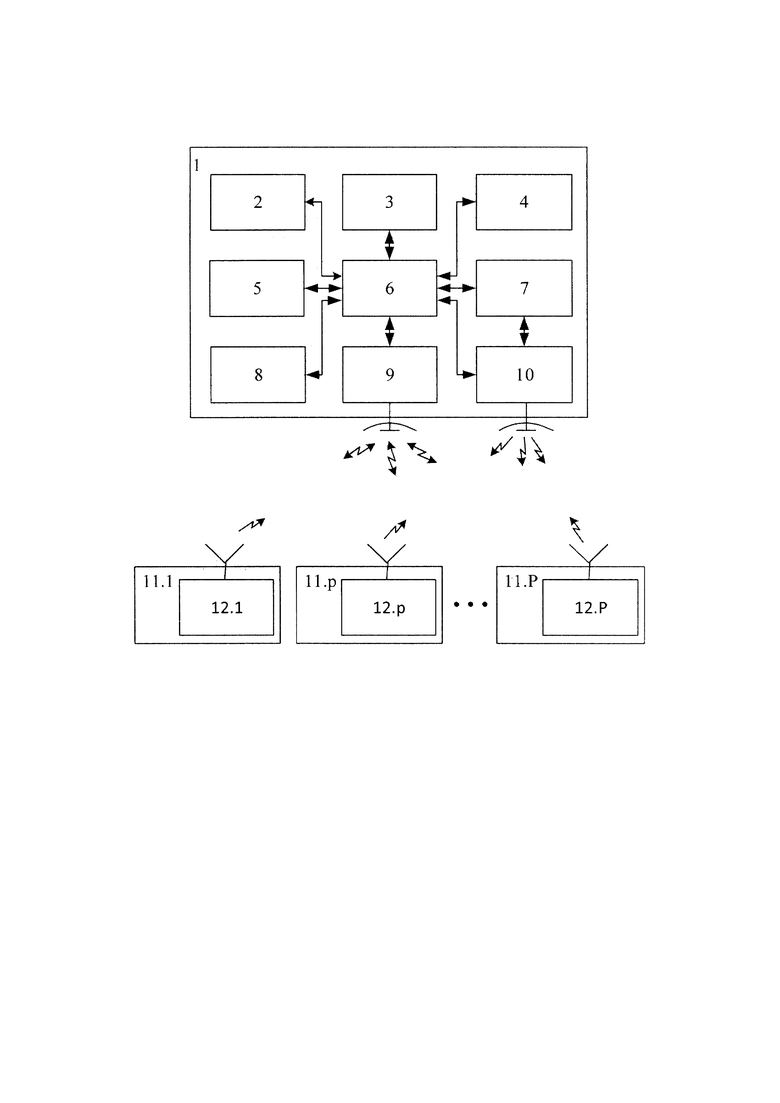
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на фигуре, где обозначено: 1 - идентифицирующий объект; 2 - блок фиксации моментов обнаружения импульсов (БФМОИ); 3 - блок предварительной обработки информации (БПОИ); 4 - блок окончательной обработки информации (БООИ); 5 -блок обнаружения наземных целей (БОНЦ); 6 - блок управления (БУ); 7 -запросчик РСАО; 8 - высотомер; 9 - РСА; 10 - блок управления диаграммой направленности (БУДНА); 11.1, …11.р, …11.Р - наземные цели, оборудованные ответчиком РСАО, правильно отвечающим на запросные сигналы; 12.1, …12.р, …12.Р - ответчики РСАО, располагаемые на наземных целях 11.1, …11.р, …11.Р соответственно.
БФМОИ 2 предназначен для фиксации моментов обнаружения импульсов на несущих частотах ответного сигнала. БПОИ 3 предназначен для формирования оценок Dn дальностей до обнаруженных наземных целей, принятого ЧВК  , совокупности
, совокупности  всех возможных векторов идентификационных признаков обнаруженных наземных целей и эталонных моделей ЧВК
всех возможных векторов идентификационных признаков обнаруженных наземных целей и эталонных моделей ЧВК  . БООИ 4 предназначен для формирования решения о векторе итоговых оценок идентификационных признаков наземных целей. БОНЦ 5 предназначен для обнаружения наземных целей на РЛИ УЗП и определения их координат
. БООИ 4 предназначен для формирования решения о векторе итоговых оценок идентификационных признаков наземных целей. БОНЦ 5 предназначен для обнаружения наземных целей на РЛИ УЗП и определения их координат  . БУС 6 предназначен для управления совместной работой элементов комплекса и их согласования на борту идентифицирующего объекта 1. Запросчик РСАО 7 предназначен для формирования и передачи кодированных запросных сигналов, а также для приема импульсов на частотах ответного сигнала. Высотомер 8 предназначен для измерения высоты полета идентифицирующего объекта 1. РСА 9 предназначена для формирования РЛИ УЗП на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении. БУДНА 10 предназначен для управления диаграммой направленности антенны запросчика РСАО 7. Ответчики РСАО 12.1, …12.р, …12.Р предназначены для приема и обработки запросных сигналов, а также для формирования и передачи кодированных ответных сигналов.
. БУС 6 предназначен для управления совместной работой элементов комплекса и их согласования на борту идентифицирующего объекта 1. Запросчик РСАО 7 предназначен для формирования и передачи кодированных запросных сигналов, а также для приема импульсов на частотах ответного сигнала. Высотомер 8 предназначен для измерения высоты полета идентифицирующего объекта 1. РСА 9 предназначена для формирования РЛИ УЗП на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении. БУДНА 10 предназначен для управления диаграммой направленности антенны запросчика РСАО 7. Ответчики РСАО 12.1, …12.р, …12.Р предназначены для приема и обработки запросных сигналов, а также для формирования и передачи кодированных ответных сигналов.
Комплекс работает следующим образом. БУС 6 управляет совместной работой элементов комплекса и согласует их на борту идентифицирующего объекта 1. РСА 9 формирует РЛИ УЗП на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении. Информация с выхода РСА 9 поступает через БУС 6 на БОНЦ 5 и БУДНА 10. БОНЦ 5 обнаруживает N наземных целей на РЛИ УЗП и определяет их координаты  . Информация с выхода БОНЦ 5 через БУС 6 поступает на вход БПОИ 3. БУДНА 10 направляет максимум диаграммы направленности антенны запросчика РСАО 7 в центральную точку анализируемого УЗП. Запросчик РСАО 7 формирует и передает через БУДНА 10 кодированный запросный сигнал в направлении центральной точки анализируемого УЗП. Ответчики РСАО 12.1, …12.р, …12.Р принимают и обрабатывают запросные сигналы, а также формируют и передают кодированные ответные сигналы. Запросчик РСАО 7 принимает импульсы на частотах ответного сигнала. Информация с выхода запросчика РСАО 7 через БУС 6 поступает на вход БФМОИ 2. БФМОИ 2 фиксирует моменты обнаружения импульсов на несущих частотах ответного сигнала. Информация с выхода БФМОИ 2 через БУС 6 поступает на вход БПОИ 3. БПОИ 3 обрабатывает поступающую на его вход информацию в соответствии с выражениями (1)-(3) и формирует при этом оценки Dn дальностей до обнаруженных наземных целей, принятый ЧВК
. Информация с выхода БОНЦ 5 через БУС 6 поступает на вход БПОИ 3. БУДНА 10 направляет максимум диаграммы направленности антенны запросчика РСАО 7 в центральную точку анализируемого УЗП. Запросчик РСАО 7 формирует и передает через БУДНА 10 кодированный запросный сигнал в направлении центральной точки анализируемого УЗП. Ответчики РСАО 12.1, …12.р, …12.Р принимают и обрабатывают запросные сигналы, а также формируют и передают кодированные ответные сигналы. Запросчик РСАО 7 принимает импульсы на частотах ответного сигнала. Информация с выхода запросчика РСАО 7 через БУС 6 поступает на вход БФМОИ 2. БФМОИ 2 фиксирует моменты обнаружения импульсов на несущих частотах ответного сигнала. Информация с выхода БФМОИ 2 через БУС 6 поступает на вход БПОИ 3. БПОИ 3 обрабатывает поступающую на его вход информацию в соответствии с выражениями (1)-(3) и формирует при этом оценки Dn дальностей до обнаруженных наземных целей, принятый ЧВК  , совокупность
, совокупность  всех возможных векторов идентификационных признаков обнаруженных наземных целей и эталонные модели ЧВК
всех возможных векторов идентификационных признаков обнаруженных наземных целей и эталонные модели ЧВК  . Информация с выхода БПОИ 3 поступает через БУС 6 на вход БООИ 4. БООИ 4 обрабатывает поступающую на его вход информацию в соответствии с выражениями (4)-(8) и формирует решение о векторе q* итоговых оценок идентификационных признаков обнаруженных наземных целей в соответствии с выражением (9).
. Информация с выхода БПОИ 3 поступает через БУС 6 на вход БООИ 4. БООИ 4 обрабатывает поступающую на его вход информацию в соответствии с выражениями (4)-(8) и формирует решение о векторе q* итоговых оценок идентификационных признаков обнаруженных наземных целей в соответствии с выражением (9).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ идентификации наземных целей, обнаруживаемых на РЛИ УЗП, в котором в качестве вектора итоговых оценок идентификационных признаков обнаруженных наземных целей принимается вектор из совокупности всех возможных векторов идентификационных признаков обнаруженных наземных целей, которому соответствует эталонная модель ЧВК с наибольшим числом совпадений с модернизированным ЧВК, который в свою очередь формируется из принятого ЧВК путем исключения моментов времени обнаружения импульсов ответных сигналов, не соответствующих по дальности и действующему коду обнаруженным наземным целям.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что, если в качестве вектора итоговых оценок идентификационных признаков обнаруженных наземных целей принимать вектор из совокупности всех возможных векторов идентификационных признаков обнаруженных наземных целей, которому соответствует эталонная модель ЧВК с наибольшим числом совпадений с модернизированным ЧВК, который в свою очередь формируется из принятого ЧВК путем исключения моментов времени обнаружения импульсов ответных сигналов, не соответствующих по дальности и действующему коду обнаруженным наземным целям, то это приведет к повышению вероятности правильной идентификации наземных целей
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2016 |
|
RU2659090C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2020 |
|
RU2741613C1 |
| СПОСОБ ДВУХПОЗИЦИОННОЙ ИДЕНТИФИКАЦИИ НАЗЕМНОЙ ЦЕЛИ | 2022 |
|
RU2797996C1 |
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791600C1 |
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНОЙ ЦЕЛИ | 2018 |
|
RU2708078C1 |
| Способ прямой идентификации воздушных целей | 2018 |
|
RU2701721C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2601872C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2023 |
|
RU2809767C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2014 |
|
RU2567243C1 |
| Моноимпульсная вторичная радиолокационная система с режимом S | 2013 |
|
RU2606386C2 |
Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств идентификации наземных целей. Техническим результатом является повышение вероятности правильной идентификации наземных целей. В заявленном способе в качестве вектора итоговых оценок идентификационных признаков обнаруженных наземных целей принимается вектор из совокупности всех возможных векторов идентификационных признаков обнаруженных наземных целей, которому соответствует эталонная модель частотно-временного кода (ЧВК) с наибольшим числом совпадений с модернизированным ЧВК, который в свою очередь формируется из принятого ЧВК путем исключения моментов времени обнаружения импульсов ответных сигналов, не соответствующих по дальности и действующему коду обнаруженным наземным целям. Это приводит к увеличению числа совпадений модернизированного ЧВК с эталонной моделью ЧВК истинного вектора идентификационных признаков обнаруженных наземных целей и, как следствие, приводит к повышению вероятности правильной идентификации наземных целей. 1 ил.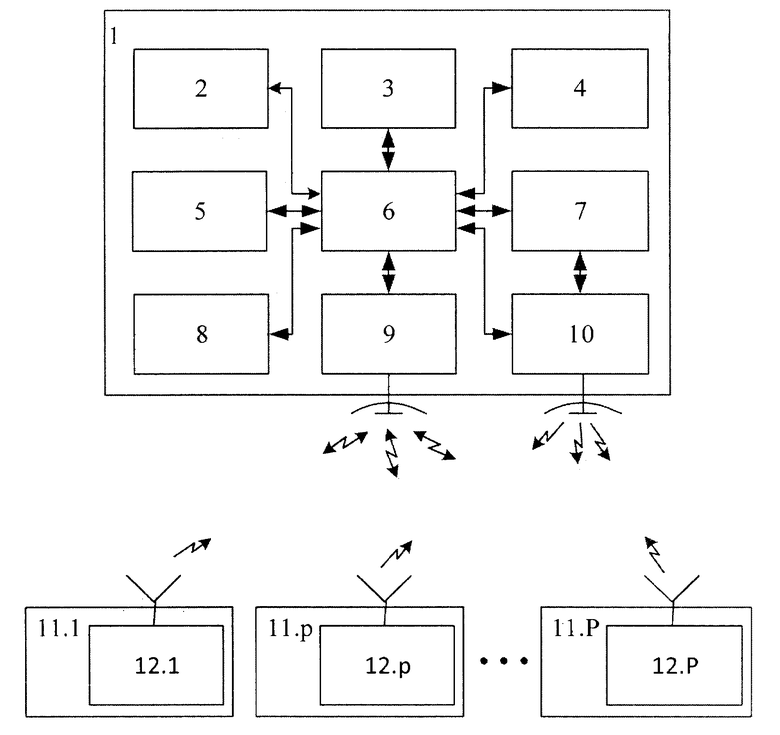
Способ идентификации наземных целей, заключающийся в формировании радиолокационного изображения (РЛИ) участка земной поверхности (УЗП) с использованием бортовой РЛС в режиме синтезирования апертуры антенны на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении, обнаружении наземных целей на РЛИ УЗП и определении их координат, косвенной оценке дальностей до обнаруженных наземных целей, формировании и передаче запросчиком радиолокационной системы с активным ответом (РСАО) кодированных запросных сигналов в виде совокупности импульсов, расположенных на определенных в соответствии с действующим кодом временных позициях, в направлении центральной точки УЗП, приеме и обработке запросных сигналов ответчиками РСАО наземных целей, находящихся в зоне действия запросного сигнала, формировании и передаче данными ответчиками кодированных ответных сигналов в виде совокупности импульсов, расположенных на определенных в соответствии с действующим кодом временных позициях и несущих частотах, приеме импульсов на частотах ответного сигнала запросчиком РСАО, фиксации моментов обнаружения импульсов на несущих частотах ответного сигнала, формировании принятого частотно-временного кода (ЧВК) как совокупности моментов времени обнаружения импульсов на несущих частотах ответного сигнала, формировании совокупности всех возможных векторов идентификационных признаков обнаруженных наземных целей, формировании эталонных моделей ЧВК, отличающийся тем, что определяют частные признаки соответствия или несоответствия принятых импульсов ответного сигнала для каждой обнаруженной наземной цели по дальности и действующему коду, с использованием данных частных признаков определяют общие признаки соответствия или несоответствия принятых импульсов ответных сигналов по дальности и действующему коду обнаруженным на РЛИ УЗП наземным целям, с использованием данных общих признаков формируют модернизированный ЧВК путем исключения из принятого ЧВК моментов времени обнаружения импульсов ответных сигналов, которые не соответствуют по дальности и действующему коду обнаруженным наземным целям, сравнивают модернизированный ЧВК с эталонными моделями ЧВК, подсчитывают для каждой эталонной модели число совпадений с модернизированным ЧВК, в качестве вектора итоговых оценок идентификационных признаков обнаруженных наземных целей принимают такой вектор из совокупности всех возможных векторов идентификационных признаков обнаруженных наземных целей, которому соответствует эталонная модель ЧВК с наибольшим числом совпадений с модернизированным ЧВК.
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2016 |
|
RU2659090C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2020 |
|
RU2741613C1 |
| СПОСОБ И СИСТЕМА ОПОЗНАВАНИЯ МАЛОГАБАРИТНЫХ РОБОТОТЕХНИЧЕСКИХ СРЕДСТВ | 2021 |
|
RU2763165C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ НА ПОВЕРХНОСТИ ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АЭРОКОСМИЧЕСКОГО БАЗИРОВАНИЯ | 1991 |
|
RU2017168C1 |
| US 5767802 A, 16.06.1998 | |||
| CN 110866887 A, 06.03.2020 | |||
| US 2020309933 A1, 01.10.2020. | |||

