Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации наземных целей (НЦ).
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ идентификации НЦ, заключающийся в формировании радиолокационного изображения (РЛИ) участка земной поверхности (УЗП) с использованием бортовой РЛС в режиме синтезирования апертуры антенны (РСА) на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении, обнаружении целей на РЛИ УЗП в автоматическом режиме или с помощью оператора, косвенной оценке дальностей до обнаруженных наземных целей, формировании и передаче запросчиком РСАО кодированного запросного сигнала (совокупности импульсов расположенных на определенных в соответствии с действующим кодом временных позициях) в направлении центральной точки УЗП, приеме и обработке запросного сигнала ответчиком (ответчиками) РСАО НЦ, формировании и передаче ответчиком (ответчиками) РСАО НЦ кодированных ответных сигналов (совокупности импульсов расположенных на определенных в соответствии с действующим кодом временных позициях и несущих частотах), приеме импульсов на частотах ответного сигнала запросчиком РСАО, фиксации моментов обнаружения импульсов на несущих частотах ответного сигнала, формировании принятого частотно-временного кода (ЧВК) как совокупности моментов времени обнаружения импульсов на несущих частотах ответного сигнала, формировании совокупности всех возможных векторов идентификационных признаков обнаруженных наземных целей, формировании эталонных моделей ЧВК, сравнении принятого ЧВК с эталонными моделями ЧВК, подсчете числа совпадений принятого ЧВК с каждой эталонной моделью ЧВК, формировании решения о векторе q* оценок идентификационных признаков обнаруженных наземных целей по критерию максимума совпадений эталонной модели ЧВК с принятым ЧВК, где
 ,
,
N - число обнаруженных наземных целей, q*∈[0,1] - оценка идентификационного признака (ИП) НЦ, q*=1 - НЦ оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы, q*=0 - НЦ не оборудована ответчиком РСАО, правильно отвечающим на запросный сигналы (см., например, патент РФ №2659090 от 28.06.2018 г. «Способ идентификации наземных целей»).
К недостаткам данного способа относится снижение достоверности идентификации НЦ в условиях многоцелевой обстановки. Одной из причин этого является то, что в условиях многоцелевой обстановки в пределах сектора неопределенности местонахождения ответчика РСАО при однократном излучении запросного сигнала могут одновременно находиться несколько наземных целей. В этой ситуации возможна ошибочная привязка идентификационного признака одной наземной цели к другой.
Техническим результатом изобретения является повышение достоверности идентификации НЦ в условиях многоцелевой обстановки.
Указанный результат достигается тем, что после обнаружения наземных целей на РЛИ УЗП определяют их координаты хЦ1n в связанной с носителем запросчика РСАО системе координат O1X1Y1Z1, где  , после формирования и передачи запросчиком РСАО из точки О1 первого кодированного запросного сигнала в момент времени tЗ1 с учетом координат хЗ1 и хЦ1n определяют координаты хЦn n-х наземных целей в относительной системе координат OXYZ, где хЗ1 - координаты точки О1 в относительной системе координат OXYZ, с учетом момента времени tЗ1 и заданного интервала времени Δt определяют момент времени tЗ2 излучения второго запросного сигнала, формируют и передают запросчиком РСАО из точки O2 второй кодированный запросный сигнал в направлении центральной точки УЗП РЛИ в момент времени tЗ2, после приема и обработки кодированных ответных сигналов переданных в ответ на второй запросный сигнал с учетом моментов времени tЗ1,
, после формирования и передачи запросчиком РСАО из точки О1 первого кодированного запросного сигнала в момент времени tЗ1 с учетом координат хЗ1 и хЦ1n определяют координаты хЦn n-х наземных целей в относительной системе координат OXYZ, где хЗ1 - координаты точки О1 в относительной системе координат OXYZ, с учетом момента времени tЗ1 и заданного интервала времени Δt определяют момент времени tЗ2 излучения второго запросного сигнала, формируют и передают запросчиком РСАО из точки O2 второй кодированный запросный сигнал в направлении центральной точки УЗП РЛИ в момент времени tЗ2, после приема и обработки кодированных ответных сигналов переданных в ответ на второй запросный сигнал с учетом моментов времени tЗ1,  , tЗ2,
, tЗ2,  и координат хЗ1, хЗ2 определяют координаты k-х носителей ответчиков РСАО в относительной системе координат OXYZ, где и - моменты времени приема k-х ответных сигналов, переданных в ответ на первый и второй запросный сигналы соответственно,
и координат хЗ1, хЗ2 определяют координаты k-х носителей ответчиков РСАО в относительной системе координат OXYZ, где и - моменты времени приема k-х ответных сигналов, переданных в ответ на первый и второй запросный сигналы соответственно,  , K - число наземных ответчиков, формирующих и передающих ответные сигналы в ответ на запросный сигнал, хЗ2 - координаты точки O2 в относительной системе координат OXYZ, отождествляют координаты каждой n-й наземной цели с координатами каждого k-го носителя ответчика РСАО, если модули разностей координат n-й наземной цели и k-го носителя ответчика РСАО не превышают допустимых отклонений по осям ОХ и OZ относительной системы координат OXYZ, то формируют решение об отождествлении координат данной наземной цели с координатами данного носителя ответчика, в противном случае формируют решение о неотождествлении координат данной наземной цели с координатами данного носителя ответчика, если в отношении n-й наземной цели сформировано хотя бы одно решение об отождествлении ее координат с координатами носителя ответчика РСАО, то формируют решение о том, что данная n - я наземная цель оборудована ответчиком РСАО правильно отвечающим на запросные сигналы запросчика РСАО, в противном случае формируют решение о том, что n - я наземная цель не оборудована ответчиком РСАО правильно отвечающим на запросные сигналы запросчика РСАО.
, K - число наземных ответчиков, формирующих и передающих ответные сигналы в ответ на запросный сигнал, хЗ2 - координаты точки O2 в относительной системе координат OXYZ, отождествляют координаты каждой n-й наземной цели с координатами каждого k-го носителя ответчика РСАО, если модули разностей координат n-й наземной цели и k-го носителя ответчика РСАО не превышают допустимых отклонений по осям ОХ и OZ относительной системы координат OXYZ, то формируют решение об отождествлении координат данной наземной цели с координатами данного носителя ответчика, в противном случае формируют решение о неотождествлении координат данной наземной цели с координатами данного носителя ответчика, если в отношении n-й наземной цели сформировано хотя бы одно решение об отождествлении ее координат с координатами носителя ответчика РСАО, то формируют решение о том, что данная n - я наземная цель оборудована ответчиком РСАО правильно отвечающим на запросные сигналы запросчика РСАО, в противном случае формируют решение о том, что n - я наземная цель не оборудована ответчиком РСАО правильно отвечающим на запросные сигналы запросчика РСАО.
Сущность изобретения заключается в том, что итоговые идентификационные признаки обнаруженных НЦ формируются на основе отождествления их координат, с координатами наземных ответчиков РСАО, определяемыми по результатам обработки кодированных ответных сигналов, сформированных и переданных наземными ответчиками РСАО в ответ на два кодированных запросных сигнала, которые в свою очередь были последовательно сформированы и переданы запросчиком РСАО воздушного судна с двух разнесенных в пространстве точек, находящихся по отношению к каждой НЦ под определенным углом χn. При увеличении угла χn уменьшается сектор неопределенности местонахождения ответчика РСАО соответствующей НЦ и, как следствие, повышается достоверность ее идентификации в условиях многоцелевой обстановки. Наибольшая достоверность идентификации НЦ достигается при χn=90°. Это объясняется тем, что данное значение (χn=90°) соответствует наименьшему сектору неопределенности местонахождения ответчика РСАО соответствующей НЦ.
Данный способ включает в себя следующие этапы:
1. На борту носителя запросчика РСАО:
1.1. Измерение текущих координат  носителя запросчика РСАО на протяжении полета в относительной системе координат OXYZ (где OXYZ - правая прямоугольная система координат с началом в неподвижной точке О, совмещенной с земной поверхностью, ось ОХ направлена на север, ось OY направлена перпендикулярно плоскости касательной к земной поверхности в точке О, ось OZ ориентирована относительно осей ОХ и OY в соответствии с правой прямоугольной системой координат).
носителя запросчика РСАО на протяжении полета в относительной системе координат OXYZ (где OXYZ - правая прямоугольная система координат с началом в неподвижной точке О, совмещенной с земной поверхностью, ось ОХ направлена на север, ось OY направлена перпендикулярно плоскости касательной к земной поверхности в точке О, ось OZ ориентирована относительно осей ОХ и OY в соответствии с правой прямоугольной системой координат).
1.2. Формирование РЛИ УЗП с использованием РСА (бортовой РЛС в режиме синтезирования апертуры антенны) на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении.
1.3. Обнаружение N наземных целей на РЛИ УЗП и определение их координат  в связанной с носителем запросчика РСАО системе координат O1X1Y1Z1, где O1X1Y1Z1 - правая прямоугольная система координат с началом в точке О1, О1 - точка местоположения носителя запросчика РСАО в момент tК определения координат ХЦ1 наземных целей, направления осей О1Х1, O1Y1 и O1Z1 совпадают с соответствующими направлениями осей OX, OY и OZ относительной системы координат OXYZ,
в связанной с носителем запросчика РСАО системе координат O1X1Y1Z1, где O1X1Y1Z1 - правая прямоугольная система координат с началом в точке О1, О1 - точка местоположения носителя запросчика РСАО в момент tК определения координат ХЦ1 наземных целей, направления осей О1Х1, O1Y1 и O1Z1 совпадают с соответствующими направлениями осей OX, OY и OZ относительной системы координат OXYZ,  - координаты n-й наземной цели в системе координат O1X1Y1Z1.
- координаты n-й наземной цели в системе координат O1X1Y1Z1.
1.4. Формирование и передача запросчиком РСАО из точки О1 первого кодированного запросного сигнала (совокупности импульсов расположенных на определенных в соответствии с действующим кодом временных позициях) в направлении центральной точки УЗП РЛИ в момент времени tЗ1, где tЗ1=tК.
1.5. Определение координат наземных целей в относительной системе координат OXYZ в соответствии с выражением

где  - координаты носителя запросчика РСАО в момент времени tЗ1 (координаты точки О1) в относительной системе координат OXYZ.
- координаты носителя запросчика РСАО в момент времени tЗ1 (координаты точки О1) в относительной системе координат OXYZ.
1.6. Определение момента времени tЗ2 излучения второго запросного сигнала, в соответствии с выражением

где Δt - заданный интервал времени между моментами излучения первого и второго запросных сигналов.
2. На наземных целях, являющихся носителями ответчиков РСАО:
2.1. Прием и обработка первого запросного сигнала ответчиком РСАО НЦ.
2.2. Формирование и передача через ненаправленную антенну первого кодированного ответного сигнала (совокупность импульсов, излучаемых на несущих частотах и временных позициях, определяемых действующим кодом) ответчиком РСАО НЦ.
3. На борту носителя запросчика РСАО:
3.1. Прием и обработка кодированных ответных сигналов, сформированных и переданных ответчиками РСАО в ответ на первый запросный сигнал, с фиксацией моментов времени  их приема, где
их приема, где  , K - число наземных ответчиков, формирующих и передающих ответные сигналы в ответ на запросный сигнал.
, K - число наземных ответчиков, формирующих и передающих ответные сигналы в ответ на запросный сигнал.
3.2. Формирование и передача запросчиком РСАО из точки О2 второго кодированного запросного сигнала в направлении центральной точки УЗП РЛИ в момент времени tЗ2.
4. На наземных целях, являющихся носителями ответчиков РСАО:
4.1. Прием и обработка второго запросного сигнала ответчиком РСАО НЦ;
4.2. Формирование и передача через ненаправленную антенну второго кодированного ответного сигнала;
5. На борту носителя запросчика РСАО
5.1. Прием и обработка вторых кодированных ответных сигналов с фиксацией моментов времени  их приема.
их приема.
5.2. Определение координат k-х носителей ответчиков РСАО в относительной системе координат OXYZ:
5.2.1. Определение длин отрезков O1Ok (Ok - точка местоположения k-го наземного ответчика РСАО) в соответствии с выражением

где Д1k - длинна отрезка O1Ok.
5.2.2. Определение длин отрезков O2Ok в соответствии с выражением

где Д2k - длинна отрезка O2Ok.
5.2.3. Определение длин отрезков  и
и  в соответствии с выражениями:
в соответствии с выражениями:
где  и
и  - длины отрезков и ,
- длины отрезков и ,  и
и  - проекции точек О1 и O2 на плоскость OXZ.
- проекции точек О1 и O2 на плоскость OXZ.
5.2.4. Определение расстояния между точками и в соответствии с выражением

5.2.5. Определение углов βk между отрезком  и отрезками в соответствии с выражением
и отрезками в соответствии с выражением

5.2.6. Определение угла γ между отрезком и осью  (ось - проекция оси O1Z1 на плоскость OXZ) в соответствии с выражением
(ось - проекция оси O1Z1 на плоскость OXZ) в соответствии с выражением

5.2.7. Определение углов αk между отрезками и осью в соответствии с выражением

5.2.8. Определение координат k-х носителей ответчиков РСАО по осям OZ и ОХ в соответствии с выражениями:
5.3. Отождествление координат каждой n-й наземной цели с координатами каждого k-го носителя ответчика РСАО:
5.3.1. Формирование промежуточных попарных признаков отождествления n-х обнаруженных наземных целей и k-х носителей ответчиков РСАО по координатным осям OZ и ОХ в соответствии с выражениями:
где Δх и Δz - допустимые отклонения координат наземных целей от координат наземных носителей ответчиков РСАО по соответствующим координатным осям ОХ и OZ.
5.3.2. Формирование попарных признаков отождествления n-х обнаруженных наземных целей и k-х носителей ответчиков РСАО в соответствии с выражением

где  , qkn=1 - попарный признак отождествления, соответствующий решению об отождествлении координат n-й цели с координатами k-го носителя ответчика, qkn=0 - попарный признак отождествления, соответствующий решению о неотождествлении координат n-й цели с координатами k-го носителя ответчика.
, qkn=1 - попарный признак отождествления, соответствующий решению об отождествлении координат n-й цели с координатами k-го носителя ответчика, qkn=0 - попарный признак отождествления, соответствующий решению о неотождествлении координат n-й цели с координатами k-го носителя ответчика.
5.4. Формирование итоговых идентификационных признаков обнаруженных наземных целей в соответствии с выражением
где  , qn=1 - идентификационный признак наземной цели, оборудованной ответчиком РСАО правильно отвечающим на запросные сигналы запросчика РСАО (координаты n-й наземной цели отождествлены с координатами хотя бы одного k-го носителя ответчика РСАО), qn=0 - идентификационный признак наземной цели, не оборудованной ответчиком РСАО правильно отвечающим на запросные сигналы запросчика РСАО (координаты n-й наземной цели не отождествлены с координатами хотя бы одного k-го носителя ответчика РСАО).
, qn=1 - идентификационный признак наземной цели, оборудованной ответчиком РСАО правильно отвечающим на запросные сигналы запросчика РСАО (координаты n-й наземной цели отождествлены с координатами хотя бы одного k-го носителя ответчика РСАО), qn=0 - идентификационный признак наземной цели, не оборудованной ответчиком РСАО правильно отвечающим на запросные сигналы запросчика РСАО (координаты n-й наземной цели не отождествлены с координатами хотя бы одного k-го носителя ответчика РСАО).
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на фигуре, где обозначено: 1 - воздушное судно, являющееся носителем запросчика РСАО; 2 - навигационная система (НС); 3 - блок обнаружения наземных целей и оценки их координат (БОНЦОК); 4 - блок обработки информации (БОИ); 5 - блок управления (БУ); 6 - запросчик РСАО; 7 - РЛС с синтезированной апертурой антенны (РСА); 8 - блок управления диаграммой направленности антенны запросчика (БУ ДНАЗ); 9 - наземная цель (НЦ), являющаяся носителем ответчика РСАО; 10 - наземный ответчик РСАО.
НС 2 предназначена для измерения текущих координат хЗ носителя запросчика РСАО на протяжении полета в относительной системе координат OXYZ. БОНЦОК 3 предназначен для обнаружения N наземных целей на РЛИ УЗП и определения их координат  в связанной с носителем запросчика РСАО системе координат O1X1Y1Z1. БОИ 4 предназначен для обработки информации и формирования итоговых идентификационных признаках обнаруженных наземных целей qn. БУ 5 предназначен для управления устройствами комплекса на борту носителя запросчика РСАО 1. Запросчик РСАО 6 предназначен для формирования и передачи через БУ ДНАЗ 8 и направленную антенну кодированных запросных сигналов, а также для приема и обработки кодированных ответных сигналов, поступающих на его вход через направленную антенну и БУ ДНАЗ 8. РСА 7 предназначена для формирования РЛИ УЗП на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении. БУ ДНАЗ 8 предназначен для управления диаграммой направленности антенны запросчика. Наземный ответчик РСАО 10 предназначен для приема и обработки запросных сигналов, поступающих на его вход через ненаправленную антенну, а также для формирования и передачи через ненаправленную антенну кодированных ответных сигналов.
в связанной с носителем запросчика РСАО системе координат O1X1Y1Z1. БОИ 4 предназначен для обработки информации и формирования итоговых идентификационных признаках обнаруженных наземных целей qn. БУ 5 предназначен для управления устройствами комплекса на борту носителя запросчика РСАО 1. Запросчик РСАО 6 предназначен для формирования и передачи через БУ ДНАЗ 8 и направленную антенну кодированных запросных сигналов, а также для приема и обработки кодированных ответных сигналов, поступающих на его вход через направленную антенну и БУ ДНАЗ 8. РСА 7 предназначена для формирования РЛИ УЗП на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении. БУ ДНАЗ 8 предназначен для управления диаграммой направленности антенны запросчика. Наземный ответчик РСАО 10 предназначен для приема и обработки запросных сигналов, поступающих на его вход через ненаправленную антенну, а также для формирования и передачи через ненаправленную антенну кодированных ответных сигналов.
Комплекс устройств работает следующим образом.
1. На борту носителя запросчика РСАО 1:
БУ 5 управляет устройствами комплекса на борту носителя запросчика РСАО 1. НС 2 измеряет текущие координаты хЗ носителя запросчика РСАО 1 на протяжении полета в относительной системе координат OXYZ. Информация о текущих координатах хЗ носителя запросчика РСАО через БУ 5 поступает в БОИ 4. РСА 7 формирует РЛИ УЗП на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении. Информация о РЛИ УЗП через БУ 5 поступает на БОНЦОК 3. БОНЦОК 3 обнаруживает N наземных целей на РЛИ УЗП и определяет их координаты в связанной с носителем запросчика РСАО 1 системе координат O1X1Y1Z1. Информация о координатах обнаруженных наземных целей через БУ 5 поступает на БОИ 4. БУ ДНАЗ 8 ориентирует диаграмму направленности антенны запросчика в направлении центральной точки УЗП РЛИ. Запросчик РСАО 6 формирует и передает из точки «О1» первый кодированный запросный сигнал через БУ ДНАЗ 8 и направленную антенну в направлении центральной точки УЗП РЛИ в момент времени tЗ1. Информация о моменте времени tЗ1 через БУ 5 поступает в БОИ 4. БОИ 4 определяет координаты наземных целей хЦn в относительной системе координат OXYZ в соответствии с выражением (1) и момент времени излучения второго запросного сигнала tЗ2 в соответствии с выражением (2). Информация о моменте времени излучения второго запросного сигнала tЗ2 поступает на БУ 5.
2. На наземных целях, являющихся носителями ответчиков РСАО:
Наземный ответчик РСАО 10 принимает и обрабатывает, поступающий на его вход через ненаправленную антенну первый запросный сигнал, а также формирует и передает через ненаправленную антенну кодированный ответный сигнал.
3. На борту носителя запросчика РСАО 1:
Запросчик РСАО 6 принимает и обрабатывает проходящие от направленной антенны через БУДНАЗ 8 кодированные ответные сигналы, сформированные и переданные ответчиками РСАО в ответ на первый запросный сигнал, с фиксацией моментов времени  их приема. Информация о моментах времени приема ответных сигналов поступает через БУ 5 на БОИ 4. Под воздействием управляющего сигнала с БУ 5 запросчик РСАО 6 формирует и передает второй кодированный запросный сигнал в направлении центральной точки УЗП РЛИ в момент времени tЗ2 из точки O2.
их приема. Информация о моментах времени приема ответных сигналов поступает через БУ 5 на БОИ 4. Под воздействием управляющего сигнала с БУ 5 запросчик РСАО 6 формирует и передает второй кодированный запросный сигнал в направлении центральной точки УЗП РЛИ в момент времени tЗ2 из точки O2.
4. На наземных целях, являющихся носителями ответчиков РСАО:
Наземный ответчик РСАО 10 принимает и обрабатывает, поступающий на его вход через ненаправленную антенну второй запросный сигнал, а также формирует и передает через ненаправленную антенну кодированный ответный сигнал.
5. На борту носителя запросчика РСАО 1:
Запросчик РСАО 6 принимает и обрабатывает проходящие от направленной антенны через БУ ДНАЗ 8 кодированные ответные сигналы, сформированные и переданные ответчиками РСАО в ответ на второй запросный сигнал, с фиксацией моментов времени  их приема. Информация о моментах времени приема ответных сигналов поступает через БУ 5 на БОИ 4. БОИ 4 определяет длины Д1k отрезков O1Ok в соответствии с выражением (3), определяет длины Д2k отрезков O2Ok в соответствии с выражением (4), определяет длины
их приема. Информация о моментах времени приема ответных сигналов поступает через БУ 5 на БОИ 4. БОИ 4 определяет длины Д1k отрезков O1Ok в соответствии с выражением (3), определяет длины Д2k отрезков O2Ok в соответствии с выражением (4), определяет длины  и
и  отрезков
отрезков  и
и  в соответствии с выражениями (5) и (6), определяет расстояние между точками
в соответствии с выражениями (5) и (6), определяет расстояние между точками  и
и  в соответствии с выражением (7), определяет углы βk между отрезком и отрезками в соответствии с выражением (8), определяет угол γ между отрезком и осью в соответствии с выражением (9), определяет углы αk между отрезками и осью в соответствии с выражением (10), определяет координаты k-х носителей ответчиков РСАО по осям OZ и ОХ в соответствии с выражениями (11) и (12), формирует промежуточные попарные признаки отождествления n-х обнаруженных наземных целей и k-х носителей ответчиков РСАО по координатным осям OZ и ОХ в соответствии с выражениями (13) и (14), формирует попарные признаки отождествления n-х обнаруженных наземных целей и k-х носителей ответчиков РСАО в соответствии с выражением (15), формирует итоговые идентификационные признаки обнаруженных наземных целей в соответствии с выражением (16).
в соответствии с выражением (7), определяет углы βk между отрезком и отрезками в соответствии с выражением (8), определяет угол γ между отрезком и осью в соответствии с выражением (9), определяет углы αk между отрезками и осью в соответствии с выражением (10), определяет координаты k-х носителей ответчиков РСАО по осям OZ и ОХ в соответствии с выражениями (11) и (12), формирует промежуточные попарные признаки отождествления n-х обнаруженных наземных целей и k-х носителей ответчиков РСАО по координатным осям OZ и ОХ в соответствии с выражениями (13) и (14), формирует попарные признаки отождествления n-х обнаруженных наземных целей и k-х носителей ответчиков РСАО в соответствии с выражением (15), формирует итоговые идентификационные признаки обнаруженных наземных целей в соответствии с выражением (16).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ идентификации наземных целей, в котором итоговые идентификационные признаки обнаруженных НЦ формируются на основе отождествления их координат с координатами наземных ответчиков РСАО, определяемыми по результатам обработки кодированных ответных сигналов, сформированных и переданных наземными ответчиками РСАО в ответ на два кодированных запросных сигнала, которые в свою очередь были последовательно сформированы и переданы запросчиком РСАО воздушного судна с двух разнесенных в пространстве точек, находящихся по отношению к каждой НЦ под определенным углом.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что формирование итоговых идентификационных признаков обнаруженных НЦ на основе отождествления их координат с координатами наземных ответчиков РСАО, определяемыми по результатам обработки кодированных ответных сигналов, сформированных и переданных наземными ответчиками РСАО в ответ на два кодированных запросных сигнала, которые в свою очередь были последовательно сформированы и переданы запросчиком РСАО воздушного судна с двух разнесенных в пространстве точек, находящихся по отношению к каждой НЦ под определенным углом, повышает достоверность идентификации НЦ в условиях многоцелевой обстановки.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДВУХПОЗИЦИОННОЙ ИДЕНТИФИКАЦИИ НАЗЕМНОЙ ЦЕЛИ | 2022 |
|
RU2797996C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791599C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2016 |
|
RU2659090C1 |
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНОЙ ЦЕЛИ | 2018 |
|
RU2708078C1 |
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791600C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2023 |
|
RU2809767C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2601872C2 |
| Способ прямой идентификации воздушных целей | 2018 |
|
RU2701721C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2014 |
|
RU2567243C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2584689C1 |

Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации воздушных целей. Техническим результатом изобретения является повышение вероятности правильной идентификации наземных целей в условиях многоцелевой обстановки. В способе идентификации наземных целей итоговые идентификационные признаки обнаруженных наземных целей формируются на основе отождествления их координат с координатами наземных ответчиков радиолокационной системы с активным ответом (РСАО), определяемыми по результатам обработки кодированных ответных сигналов, сформированных и переданных наземными ответчиками РСАО в ответ на два кодированных запросных сигнала, которые в свою очередь были последовательно сформированы и переданы запросчиком РСАО воздушного судна из двух разнесенных в пространстве точек, находящихся по отношению к каждой наземной цели под определенным углом. 1 ил.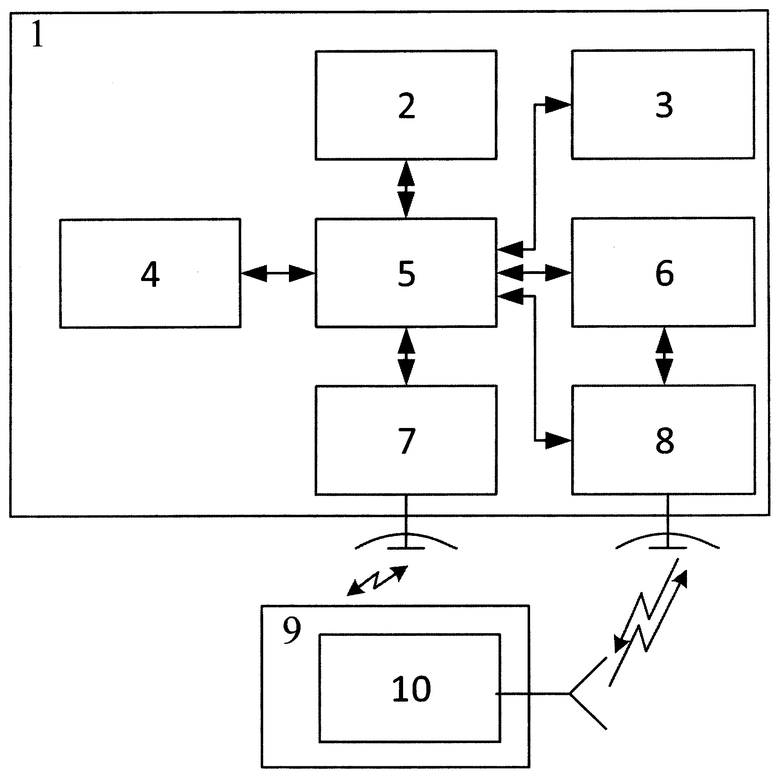
Способ идентификации наземных целей, основанный на формировании радиолокационного изображения (РЛИ) участка земной поверхности (УЗП), с использованием бортовой РЛС в режиме синтезирования апертуры антенны, на расстоянии, обеспечивающем покрытие запросным сигналом данного УЗП при однократном излучении, обнаружении N наземных целей на РЛИ УЗП, формировании и передаче запросчиком радиолокационной системы с активным ответом (РСАО) кодированного запросного сигнала в направлении центральной точки УЗП, приеме и обработке запросного сигнала ответчиками РСАО наземных целей, формировании и передаче кодированных ответных сигналов ответчиками РСАО наземных целей, приеме и обработке кодированных ответных сигналов запросчиком РСАО, отличающийся тем, что после обнаружения наземных целей на РЛИ УЗП определяют их координаты  в связанной с носителем запросчика РСАО системе координат O1X1Y1Z1, где
в связанной с носителем запросчика РСАО системе координат O1X1Y1Z1, где  , после формирования и передачи запросчиком РСАО из точки О1 первого кодированного запросного сигнала в момент времени tЗ1 с учетом координат хЗ1 и определяют координаты
, после формирования и передачи запросчиком РСАО из точки О1 первого кодированного запросного сигнала в момент времени tЗ1 с учетом координат хЗ1 и определяют координаты  n-х наземных целей в относительной системе координат OXYZ, где хЗ1 - координаты точки О1 в относительной системе координат OXYZ, с учетом момента времени tЗ1 и заданного интервала времени Δt определяют момент времени tЗ2 излучения второго запросного сигнала, формируют и передают запросчиком РСАО из точки О2 второй кодированный запросный сигнал в направлении центральной точки УЗП РЛИ в момент времени tЗ2, после приема и обработки кодированных ответных сигналов, переданных в ответ на второй запросный сигнал, с учетом моментов времени tЗ1,
n-х наземных целей в относительной системе координат OXYZ, где хЗ1 - координаты точки О1 в относительной системе координат OXYZ, с учетом момента времени tЗ1 и заданного интервала времени Δt определяют момент времени tЗ2 излучения второго запросного сигнала, формируют и передают запросчиком РСАО из точки О2 второй кодированный запросный сигнал в направлении центральной точки УЗП РЛИ в момент времени tЗ2, после приема и обработки кодированных ответных сигналов, переданных в ответ на второй запросный сигнал, с учетом моментов времени tЗ1,  , tЗ2,
, tЗ2,  и координат xЗ1, xЗ2 определяют координаты k-x носителей ответчиков РСАО в относительной системе координат OXYZ, где и - моменты времени приема k-х ответных сигналов, переданных в ответ на первый и второй запросный сигналы соответственно,
и координат xЗ1, xЗ2 определяют координаты k-x носителей ответчиков РСАО в относительной системе координат OXYZ, где и - моменты времени приема k-х ответных сигналов, переданных в ответ на первый и второй запросный сигналы соответственно,  , K - число наземных ответчиков, формирующих и передающих ответные сигналы в ответ на запросный сигнал, xЗ2 - координаты точки О2 в относительной системе координат OXYZ, отождествляют координаты каждой n-й наземной цели с координатами каждого k-го носителя ответчика РСАО, если модули разностей координат n-й наземной цели и k-го носителя ответчика РСАО не превышают допустимых отклонений по осям ОХ и OZ относительной системы координат OXYZ, то формируют решение об отождествлении координат данной наземной цели с координатами данного носителя ответчика, в противном случае формируют решение о неотождествлении координат данной наземной цели с координатами данного носителя ответчика, если в отношении n-й наземной цели сформировано хотя бы одно решение об отождествлении ее координат с координатами носителя ответчика РСАО, то формируют решение о том, что данная n-я наземная цель оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы запросчика РСАО, в противном случае формируют решение о том, что n-я наземная цель не оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы запросчика РСАО.
, K - число наземных ответчиков, формирующих и передающих ответные сигналы в ответ на запросный сигнал, xЗ2 - координаты точки О2 в относительной системе координат OXYZ, отождествляют координаты каждой n-й наземной цели с координатами каждого k-го носителя ответчика РСАО, если модули разностей координат n-й наземной цели и k-го носителя ответчика РСАО не превышают допустимых отклонений по осям ОХ и OZ относительной системы координат OXYZ, то формируют решение об отождествлении координат данной наземной цели с координатами данного носителя ответчика, в противном случае формируют решение о неотождествлении координат данной наземной цели с координатами данного носителя ответчика, если в отношении n-й наземной цели сформировано хотя бы одно решение об отождествлении ее координат с координатами носителя ответчика РСАО, то формируют решение о том, что данная n-я наземная цель оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы запросчика РСАО, в противном случае формируют решение о том, что n-я наземная цель не оборудована ответчиком РСАО, правильно отвечающим на запросные сигналы запросчика РСАО.
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2016 |
|
RU2659090C1 |
| Способ локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы | 2019 |
|
RU2703996C2 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ В ТРЕХКАНАЛЬНОЙ ЦИФРОВОЙ РСА | 1998 |
|
RU2205423C2 |
| СПОСОБ КОМПЛЕКСНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ, ОБНАРУЖИВАЕМЫХ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2016 |
|
RU2692470C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ НА ПОВЕРХНОСТИ ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АЭРОКОСМИЧЕСКОГО БАЗИРОВАНИЯ | 1991 |
|
RU2017168C1 |
| US 5767802 A, 16.06.1998 | |||
| KR 20110083397 A, 20.07.2011 | |||
| JPH 09189762 A, 22.07.1997 | |||
| KR 20180066669 A, 19.06.2018. | |||

