УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится, в общем, к способу определения оптимального натяжения ремешка носимого устройства и носимому устройству с функцией измерения физиологических параметров, такому как интеллектуальные часы, фитнес-браслет и т.д., способному определять оптимальное натяжение ремешка для точного измерения физиологических параметров.
Описание предшествующего уровня техники
[0002] Точность измерения физиологических параметров носимым устройством с использованием фотоплетизмографии (ФПГ) и электрокардиографии (ЭКГ) зависит от натяжения ремешка носимого устройства, т.е. фиксации ремешка на запястье. В случае слабого натяжения ремешка артефакты движения, возникающие при перемещении носимого устройства относительно запястья, искажают сигналы измерения, и точность измерения физиологических параметров ухудшается. В случае сильного натяжения ремешок излишне давит на запястье и мешает кровотоку. В результате сигналы измерения не отражают действительные физиологические параметры, и точность измерения физиологических параметров ухудшается.
[0003] Эффективность существующих алгоритмов подавления артефактов движения для восстановления сигналов ФПГ и сигналов ЭКГ также зависит от натяжения ремешка носимого устройства и значительно снижается при слишком слабом натяжении ремешка, так как отношение сигнал/шум резко уменьшается.
[0004] В уровне техники известны технические решения для регулировки натяжения ремешка носимого устройства.
[0005] Заявка на патент США US2010302914A1, опубликованная 02.12.2010 и озаглавленная «APPARATUS FOR SECURING AND ADJUSTING A WATCH STRAP», предлагает устройство для крепления и регулировки ремешка часов, которое позволяет фиксировать и закреплять ремешок часов с пилообразными зубьями на месте с помощью запорного механизма, имеющего взаимодополняющие пилообразные зубья. Ремешок часов может двигаться в одном направлении, чтобы затянуть ремешок часов вокруг запястья пользователя, но не может двигаться в противоположном направлении. Чтобы отстегнуть или ослабить ремешок часов, пользователь может применить нажатие, чтобы разблокировать механизм блокировки. Однако это устройство не определяет оптимальное натяжение ремешка для измерения физиологических параметров. Кроме того, это устройство предназначено для работы только с ремешком с пилообразными зубьями.
[0006] Патент США US10398200B2, выданный 03.09.2019 и озаглавленный «DYNAMIC FIT ADJUSTMENT FOR WEARABLE ELECTRONIC DEVICES», предлагает системы и способы динамической регулировки прилегания носимого электронного устройства. Во многих вариантах осуществления натяжитель, связанный с носимым электронным устройством, может управлять одним или более исполнительными механизмами, механически соединенными либо с корпусом, либо с ремешком, прикрепленным к носимому электронному устройству. В одном примере, в ответ на сигнал увеличить натяжение ремешка от процессора, натяжитель может заставить исполнительный(ые) механизм(ы) увеличить натяжение ремешка. Системы динамической регулировки прилегания носимого электронного устройства имеют электромеханическую конструкцию, которая увеличивает вес носимого устройства, и не выдают указаний пользователю по регулировке натяжения ремешка для точного измерения физиологических параметров.
[0007] Патент КНР CN104473390B, выданный 30.03.2016 и озаглавленный «WRIST STRAP AND WATCH», предлагает ремешок на запястье, содержащий корпус ремешка на запястье, линию передачи, вращающийся механизм, контроллер, детектор состояния движения и датчик. Скорость движения пользователя может быть обнаружена датчиком в режиме реального времени. Полученное значение скорости движения отправляется на детектор состояния движения. Состояние движения пользователя может быть оценено детектором состояния движения в соответствии с полученной информацией о скорости. Различные сигналы состояния могут быть выведены на контроллер в соответствии с различными скоростями движения. После того как контроллер получает сигнал состояния, выдаваемый детектором состояния движения, управляющий сигнал, согласованный с сигналом состояния, выводится на вращающийся механизм, так что вращающийся механизм может свернуть или освободить линию передачи с помощью передающего устройства. Таким образом диаметр отверстия корпуса ремешка можно изменить и отрегулировать, может быть реализована автоматическая регулировка степени натяжения браслета в зависимости от скорости движения пользователя. Ремешок на запястье имеет электромеханическую конструкцию, которая увеличивает вес носимого устройства. Натяжение ремешка на запястье регулируется только в зависимости от скорости движения пользователя и ремешок на запястье не обеспечивает оптимальное натяжение ремешка для измерения физиологических параметров.
[0008] Заявка на патент КНР CN106580291A, опубликованная 26.04.2017 и озаглавленная «METHOD FOR ADJUSTING WEARING OF SMART WEARABLE EQUIPMENT», предлагает интеллектуальный браслет, который содержит один или более датчиков частоты сердечных сокращений, датчик артериального давления и датчик кислорода в крови, и дополнительно содержит по меньшей мере один датчик давления. Один или более из датчика частоты сердечных сокращений, датчика артериального давления и датчика кислорода в крови соединен или соединены с процессором интеллектуального браслета, и по меньшей мере один датчик давления соединен с процессором. Процессор определяет, правильно ли надет браслет, только на основании данных от датчика давления.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0009] Задачей настоящего изобретения является обеспечение способа определения оптимального натяжения ремешка носимого устройства и носимого устройства с функцией измерения физиологических параметров, которые определяют оптимальное натяжение ремешка на основании сигналов от акселерометра/гироскопа, вибромотора и по меньшей мере одного датчика измерения физиологических параметров, что обеспечивает увеличение точности измерения физиологических параметров.
[0010] Один аспект настоящего изобретения обеспечивает способ определения оптимального натяжения ремешка носимого устройства для измерения физиологических параметров, причем ремешок содержит застежку и отверстия для фиксации ремешка на запястье пользователя, носимое устройство содержит по меньшей мере один процессор, память, вибромотор, акселерометр/гироскоп и фотоплетизмографический датчик, содержащий по меньшей мере два источника света, длины волн света которых отличаются друг от друга, при этом способ содержит этап, на котором определяют отверстие на ремешке, на которое должен быть застегнут ремешок, для оптимального натяжения ремешка для измерения физиологических параметров посредством обработки по меньшей мере сигналов фотоплетизмографии (ФПГ) фотоплетизмографического датчика, сигнала акселерометра/гироскопа и сигнала вибромотора.
[0011] В дополнительном аспекте этап определения отверстия на ремешке для оптимального натяжения ремешка для измерения физиологических параметров содержит этапы, на которых: определяют, находится ли отверстие, на которое застегнут ремешок, в допустимом диапазоне, состоящем из трех отверстий, включающих в себя отверстие для оптимального натяжения ремешка, посредством обработки по меньшей мере сигналов ФПГ; и если отверстие, на которое застегнут ремешок, находится в упомянутом допустимом диапазоне, определяют, застегнут ли ремешок на отверстие для оптимального натяжения ремешка, посредством обработки сигналов ФПГ, сигнала акселерометра/гироскопа и сигнала вибромотора.
[0012] В другом дополнительном аспекте этап определения, находится ли отверстие, на которое застегнут ремешок, в допустимом диапазоне, содержит этапы, на которых: одновременно принимают (S101) по меньшей мере два сигнала ФПГ, полученные фотоплетизмографическим датчиком, содержащим по меньшей мере два источника света, и сигнал акселерометра/гироскопа, причем каждый сигнал ФПГ получен с использованием соответствующего источника света из по меньшей мере двух источников света; извлекают (S103) признаки сигнала ФПГ из каждого сигнала ФПГ, состоящие из набора амплитуд и фаз сигнала, полученного посредством оцифровки сигнала ФПГ и преобразования оцифрованного сигнала ФПГ дискретным преобразованием Фурье; определяют (S105), являются ли сигналы ФПГ хорошего качества или плохого качества, посредством обработки извлеченных признаков сигналов ФПГ обученной моделью искусственного интеллекта (ИИ) для определения качества сигнала, при этом если сигналы ФПГ являются сигналами ФПГ хорошего качества, то отверстие, на которое застегнут ремешок, находится в допустимом диапазоне.
[0013] В еще одном дополнительном аспекте обученная модель ИИ для определения качества сигнала обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, с указанием, что признаки сигналов ФПГ, полученных от разных пользователей, относятся к сигналу ФПГ хорошего качества или сигналу ФПГ плохого качества.
[0014] В еще одном дополнительном аспекте этап определения, находится ли отверстие, на которое застегнут ремешок, в допустимом диапазоне, дополнительно содержит этапы, на которых: извлекают (S107) признаки сигнала акселерометра/гироскопа из сигнала акселерометра/гироскопа, состоящие из наборов амплитуд и фаз составляющих по осям X, Y, Z сигнала акселерометра/гироскопа, полученных посредством оцифровки составляющих по осям X, Y, Z сигнала акселерометра/гироскопа и преобразования оцифрованных составляющих по осям X, Y, Z сигнала акселерометра/гироскопа дискретным преобразованием Фурье; определяют (S109), содержатся ли артефакты движения в сигналах ФПГ плохого качества, посредством оценки сигнала акселерометра/гироскопа, принятого одновременно с сигналами ФПГ плохого качества, при этом если сигнал акселерометра/гироскопа выдает значение ускорения свободного падения, то сигналы ФПГ плохого качества не содержат артефакты движения, а если сигнал акселерометра/гироскопа выдает значение, отличающееся от значения ускорения свободного падения, то сигналы ФПГ плохого качества содержат артефакты движения; если сигналы ФПГ являются сигналами ФПГ плохого качества с артефактами движения, определяют (S111), находится ли отверстие, на которое застегнут ремешок, в упомянутом допустимом диапазоне посредством обработки извлеченных признаков сигналов ФПГ и извлеченных признаков сигнала акселерометра/гироскопа обученной моделью ИИ для оценки слабого натяжения; если на этапе S111 определено, что отверстие, на которое застегнут ремешок, не находится в упомянутом допустимом диапазоне, выдают (S113) обученной моделью ИИ для оценки слабого натяжения уведомление затянуть ремешок, при этом после того как пользователь затянул ремешок, определение оптимального натяжения ремешка носимого устройства повторяется с этапа S101.
[0015] В еще одном дополнительном аспекте обученная модель ИИ для оценки слабого натяжения обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, и признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с привязкой упомянутых признаков к положениям на ремешке носимого устройства, вычисленным по формуле L + χ = D для разных пользователей, где L является диаметром запястья, χ является толщиной носимого устройства и D является положением на ремешке, при этом положение на ремешке совпадает с одним отверстием на ремешке.
[0016] В еще одном дополнительном аспекте этап определения, находится ли отверстие, на которое застегнут ремешок, в допустимом диапазоне, дополнительно содержит этапы, на которых: если сигналы ФПГ являются сигналами ФПГ плохого качества без артефактов движения, определяют (S115), находится ли отверстие, на которое застегнут ремешок, в упомянутом допустимом диапазоне посредством обработки извлеченных признаков сигналов ФПГ обученной моделью ИИ для оценки сильного натяжения; если на этапе S115 определено, что отверстие, на которое застегнут ремешок, не находится в упомянутом допустимом диапазоне, выдают (S117) обученной моделью ИИ для оценки сильного натяжения уведомление ослабить ремешок, при этом после того как пользователь ослабил ремешок, определение оптимального натяжения ремешка носимого устройства повторяется с этапа S101.
[0017] В еще одном дополнительном аспекте обученная модель ИИ для оценки сильного натяжения обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, с привязкой упомянутых признаков к положениям на ремешке носимого устройства, вычисленным по формуле L + χ = D для разных пользователей, при этом положение на ремешке совпадает с одним отверстием на ремешке.
[0018] В еще одном дополнительном аспекте способ дополнительно содержит этапы, на которых: если сигналы ФПГ являются сигналами ФПГ плохого качества без артефактов движения, оцифровывают сигналы ФПГ; выполняют цифровую полосовую фильтрацию оцифрованных сигналов ФПГ в диапазоне 0,5 Гц – 15 Гц; и извлекают признаки оцифрованного фильтрованного сигнала ФПГ из каждого оцифрованного фильтрованного сигнала ФПГ, состоящие из набора амплитуд и фаз сигнала, полученного посредством преобразования оцифрованного фильтрованного сигнала ФПГ дискретным преобразованием Фурье, при этом определение, находится ли отверстие, на которое застегнут ремешок, в упомянутом допустимом диапазоне, выполняют посредством обработки извлеченных признаков оцифрованных фильтрованных сигналов ФПГ обученной моделью ИИ для оценки сильного натяжения.
[0019] В еще одном дополнительном аспекте этап определения, застегнут ли ремешок на отверстие для оптимального натяжения ремешка, содержит этапы, на которых: если отверстие, на которое застегнут ремешок, находится в упомянутом допустимом диапазоне, включают (S119) вибромотор носимого устройства; одновременно принимают (S121) по меньшей мере два сигнала ФПГ, полученные фотоплетизмографическим датчиком, содержащим по меньшей мере два источника света, и сигнал акселерометра/гироскопа, причем каждый сигнал ФПГ получен с использованием соответствующего источника света из по меньшей мере двух источников света, и длины волн света источников света отличаются друг от друга; определяют (S123) акселерометром/гироскопом участки принятых сигналов ФПГ и участок принятого сигнала акселерометра/гироскопа, которые содержат артефакты движения от вибромотора; извлекают (S125) признаки сигнала ФПГ из участка каждого сигнала ФПГ, который содержит артефакты движения от вибромотора, причем признаки сигнала ФПГ состоят из набора амплитуд и фаз сигнала, полученного посредством оцифровки сигнала ФПГ и преобразования оцифрованного сигнала ФПГ дискретным преобразованием Фурье; извлекают (S127) признаки сигнала акселерометра/гироскопа из участка сигнала акселерометра/гироскопа, который содержит артефакты движения от вибромотора, причем признаки сигнала акселерометра/гироскопа состоят из наборов амплитуд и фаз составляющих по осям X, Y, Z сигнала акселерометра/гироскопа, полученных посредством оцифровки составляющих по осям X, Y, Z сигнала акселерометра/гироскопа и преобразования оцифрованных составляющих по осям X, Y, Z сигнала акселерометра/гироскопа дискретным преобразованием Фурье; определяют (S129), застегнут ли ремешок на отверстие для оптимального натяжения ремешка, посредством обработки извлеченных признаков сигналов ФПГ и извлеченных признаков сигнала акселерометра/гироскопа обученной моделью ИИ для оценки оптимального натяжения; и если на этапе S129 определено, что ремешок не застегнут на отверстие для оптимального натяжения ремешка, выдают (S131) обученной моделью ИИ для оценки оптимального натяжения уведомление ослабить или затянуть ремешок на одно отверстие.
[0020] В еще одном дополнительном аспекте обученная модель ИИ для оценки оптимального натяжения обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, и признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с привязкой упомянутых признаков к положениям на ремешке носимого устройства, вычисленным по формуле L + χ = D для разных пользователей, при этом положение на ремешке совпадает с одним отверстием на ремешке.
[0021] В еще одном дополнительном аспекте способ дополнительно содержит этапы, на которых: принимают значение импеданса, полученное биоимпедансометром одновременно с по меньшей мере двумя сигналами ФПГ и сигналом акселерометра/гироскопа; при этом определение, застегнут ли ремешок на отверстие для оптимального натяжения ремешка, выполняют посредством обработки извлеченных признаков сигналов ФПГ, извлеченных признаков сигнала акселерометра/гироскопа и значения импеданса обученной моделью ИИ для оценки оптимального натяжения.
[0022] В еще одном дополнительном аспекте обученная модель ИИ для оценки оптимального натяжения обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, и значениях импеданса, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с привязкой упомянутых признаков и значений импеданса к положениям на ремешке носимого устройства, вычисленным по формуле L + χ = D для разных пользователей, при этом положение на ремешке совпадает с одним отверстием на ремешке.
[0023] В еще одном дополнительном аспекте способ дополнительно содержит этапы, на которых: принимают электрический сигнал, полученный пьезоэлектрическим датчиком одновременно с по меньшей мере двумя сигналами ФПГ и сигналом акселерометра/гироскопа; при этом определение, застегнут ли ремешок на отверстие для оптимального натяжения ремешка, выполняют посредством обработки извлеченных признаков сигналов ФПГ, извлеченных признаков сигнала акселерометра/гироскопа и электрического сигнала обученной моделью ИИ для оценки оптимального натяжения.
[0024] В еще одном дополнительном аспекте обученная модель ИИ для оценки оптимального натяжения обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, и электрических сигналах, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с привязкой упомянутых признаков и электрических сигналов к положениям на ремешке носимого устройства, вычисленным по формуле L + χ = D для разных пользователей, при этом положение на ремешке совпадает с одним отверстием на ремешке.
[0025] В еще одном дополнительном аспекте способ дополнительно содержит этапы, на которых: когда ремешок застегнут на отверстие для оптимального натяжения ремешка, одновременно принимают по меньшей мере два сигнала ФПГ, полученные фотоплетизмографическим датчиком, содержащим по меньшей мере два источника света, и сигнал акселерометра/гироскопа, причем каждый сигнал ФПГ получен с использованием соответствующего источника света из по меньшей мере двух источников света; извлекают признаки сигнала ФПГ из каждого сигнала ФПГ, состоящие из набора амплитуд и фаз сигнала, полученного посредством оцифровки сигнала ФПГ и преобразования оцифрованного сигнала ФПГ дискретным преобразованием Фурье; извлекают признаки сигнала акселерометра/гироскопа из сигнала акселерометра/гироскопа, состоящие из наборов амплитуд и фаз составляющих по осям X, Y, Z сигнала акселерометра/гироскопа, полученных посредством оцифровки составляющих по осям X, Y, Z сигнала акселерометра/гироскопа и преобразования оцифрованных составляющих по осям X, Y, Z сигнала акселерометра/гироскопа дискретным преобразованием Фурье; определяют, присутствует ли повышенная физическая активность в действиях пользователя носимого устройства, посредством обработки извлеченных признаков сигналов ФПГ и извлеченных признаков сигнала акселерометра/гироскопа обученной моделью ИИ для определения повышенной физической активности; и если определено, что повышенная физическая активность присутствует, выдают обученной моделью ИИ для определения повышенной физической активности уведомление затянуть ремешок на одно отверстие.
[0026] В еще одном дополнительном аспекте обученная модель ИИ для определения повышенной физической активности обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, и признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с указанием, что признаки сигналов ФПГ и признаки сигналов акселерометра/гироскопа относятся к повышенной физической активности или не относятся к повышенной физической активности.
[0027] Другой аспект настоящего изобретения обеспечивает носимое устройство с функцией измерения физиологических параметров, содержащее: ремешок, содержащий застежку и отверстия для фиксации ремешка на запястье пользователя; вибромотор; акселерометр/гироскоп; фотоплетизмографический датчик, содержащий по меньшей мере два источника света, длины волн света которых отличаются друг от друга; по меньшей мере один процессор; и память, в которой хранятся числовые параметры обученной модели искусственного интеллекта (ИИ) для определения качества сигнала, обученной модели ИИ для оценки слабого натяжения, обученной модели ИИ для оценки сильного натяжения, обученной модели ИИ для оценки оптимального натяжения, обученной модели ИИ для определения повышенной физической активности и инструкции, которые при выполнении по меньшей мере одним процессором, заставляют по меньшей мере один процессор выполнять способ по любому варианту осуществления.
[0028] В дополнительном аспекте по меньшей мере один процессор дополнительно выполнен с возможностью цифровой полосовой фильтрации оцифрованных сигналов ФПГ в диапазоне 0,5 Гц – 15 Гц.
[0029] В другом дополнительном аспекте носимое устройство дополнительно содержит биоимпедансометр для получения значения импеданса одновременно с по меньшей мере двумя сигналами ФПГ и сигналом акселерометра/гироскопа.
[0030] В еще одном дополнительном аспекте носимое устройство дополнительно содержит пьезоэлектрический датчик для получения электрического сигнала одновременно с по меньшей мере двумя сигналами ФПГ и сигналом акселерометра/гироскопа.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
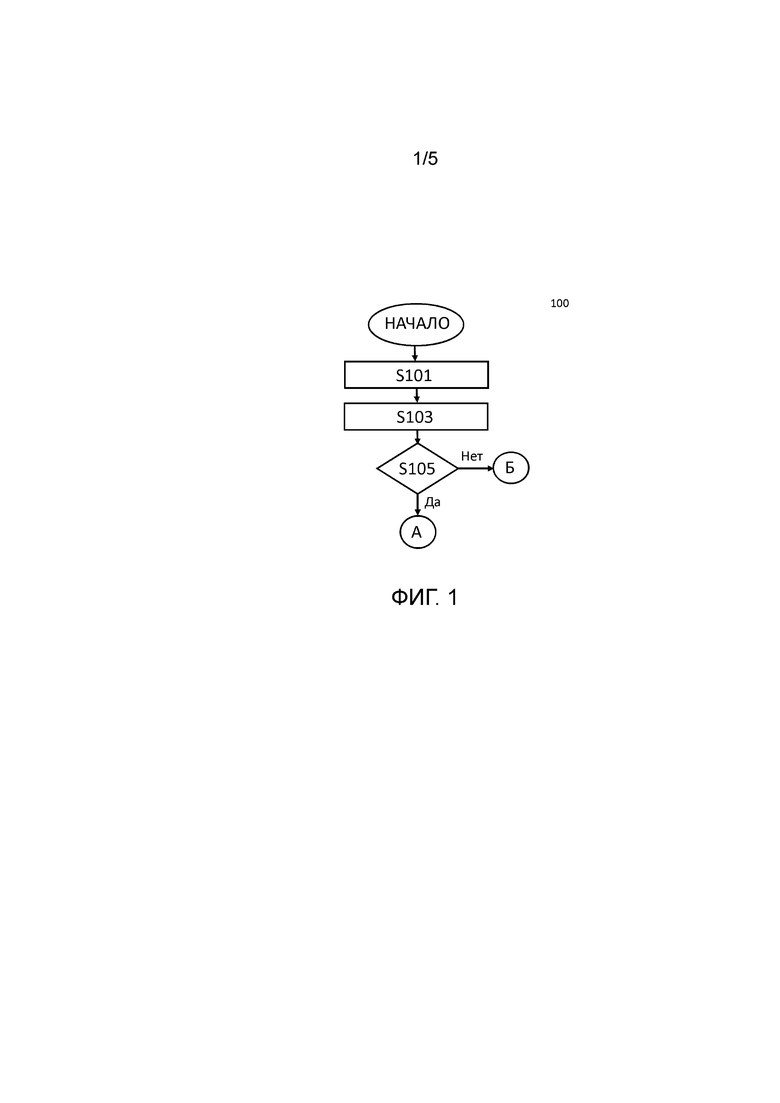
[0031] Фиг. 1 является блок-схемой последовательности операций для определения, находится ли отверстие, на которое застегнут ремешок, в допустимом диапазоне на основании качества сигналов ФПГ.
[0032] Фиг. 2 является блок-схемой последовательности операций для определения, находится ли отверстие, на которое застегнут ремешок, в допустимом диапазоне, на основании сигналов ФПГ плохого качества с артефактами движения.
[0033] Фиг. 3 является блок-схемой последовательности операций для определения, находится ли отверстие, на которое застегнут ремешок, в допустимом диапазоне, на основании сигналов ФПГ плохого качества без артефактов движения.
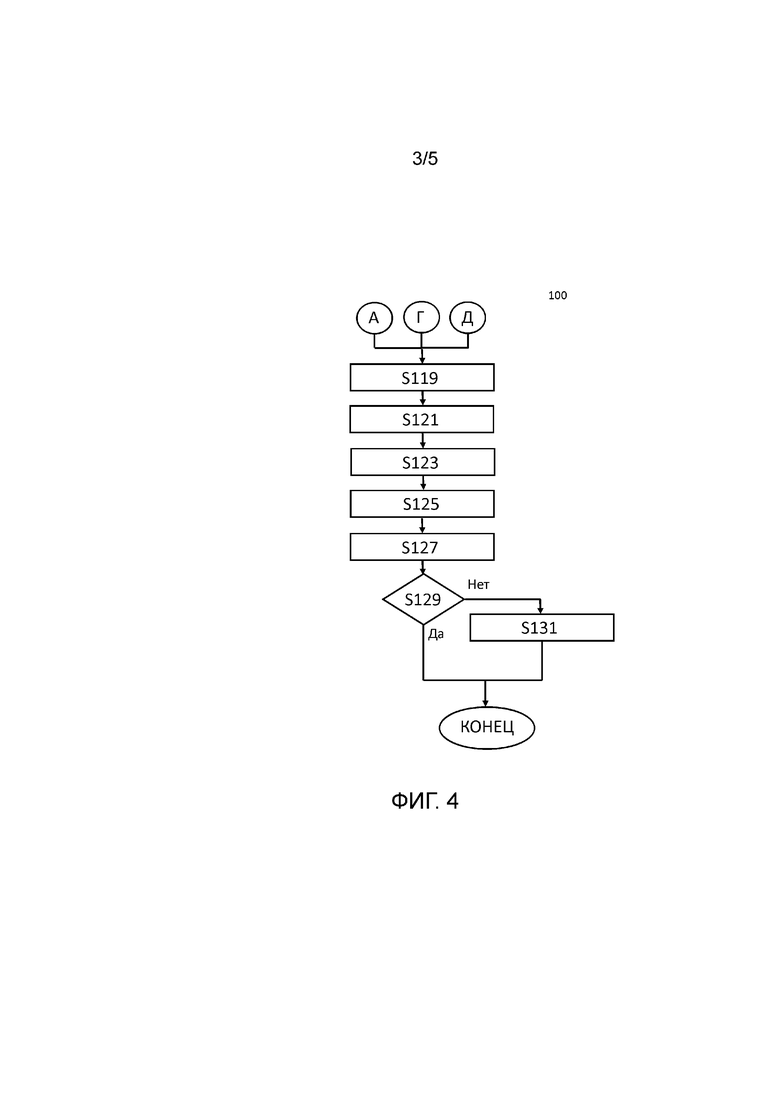
[0034] Фиг. 4 является блок-схемой последовательности операций для определения, застегнут ли ремешок на отверстие для оптимального натяжения ремешка.
[0035] Фиг. 5 является блок-схемой носимого устройства согласно варианту осуществления.
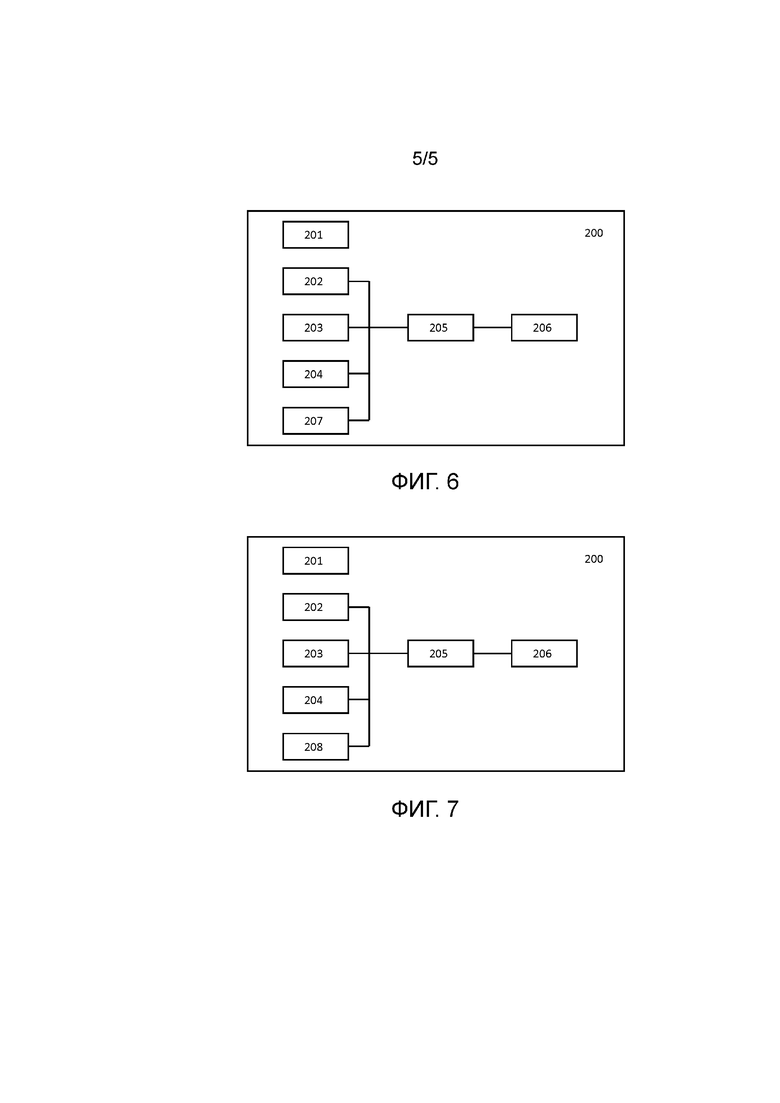
[0036] Фиг. 6 является блок-схемой носимого устройства согласно еще одному варианту осуществления.
[0037] Фиг. 7 является блок-схемой носимого устройства согласно еще одному варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[0038] Нижеследующее описание со ссылкой на прилагаемые чертежи приведено, чтобы облегчить полное понимание различных вариантов осуществления настоящего изобретения, заданного формулой изобретения, и его эквивалентов. Описание включает в себя различные конкретные подробности, чтобы облегчить такое понимание, но данные подробности следует считать только примерными. Соответственно, специалисты в данной области техники обнаружат, что можно разработать различные изменения и модификации различных вариантов осуществления, описанных в настоящей заявке, без выхода за пределы объема настоящего изобретения. Кроме того, описания общеизвестных функций и конструкций могут быть исключены для ясности и краткости.
[0039] Термины и формулировки, используемые в последующем описании и формуле изобретения не ограничены библиографическим значениями, а просто использованы создателем настоящего изобретения, чтобы обеспечить четкое и последовательное понимание настоящего изобретения. Соответственно, специалистам в данной области техники должно быть ясно, что последующее описание различных вариантов осуществления настоящего изобретения предлагается только для иллюстрации.
[0040] Следует понимать, что формы единственного числа включают в себя множественность, если контекст явно не указывает иное.
[0041] Следует понимать, что хотя термины «первый», «второй» и т.д. могут использоваться здесь в отношении элементов настоящего раскрытия, такие элементы не следует толковать как ограниченные этими терминами. Термины используются только для того, чтобы отличить один элемент от других элементов.
[0042] Дополнительно следует понимать, что термины «содержит», «содержащий», «включает в себя» и/или «включающий в себя», при использовании в настоящей заявке, означают присутствие изложенных признаков, значений, операций, элементов и/или компонентов, но не исключают присутствия или добавления одного или более других признаков, значений, операций, элементов, компонентов и/или их групп.
[0043] В различных вариантах осуществления настоящего раскрытия «модуль» или «блок» может выполнять по меньшей мере одну функцию или операцию и может быть реализован с помощью аппаратного обеспечения, программного обеспечения или их комбинации. «Множество модулей» или «множество блоков» может быть реализовано по меньшей мере с одним процессором посредством его интеграции по меньшей мере с одним модулем, отличным от «модуля» или «блока», который необходимо реализовать с помощью специального аппаратного обеспечения.
[0044] По меньшей мере один из множества модулей может быть реализован посредством модели искусственного интеллекта (ИИ). Функция, связанная с ИИ, может выполняться посредством энергонезависимой памяти, энергозависимой памяти и процессора.
[0045] Процессор может включать в себя один или множество процессоров. В то же время один или множество процессоров могут быть процессором общего назначения, таким как центральный процессор (ЦП), процессор приложений (AP) или подобный, процессором для графики, таким как графический процессор (GPU), процессор обработки изображений (VPU) и/или специализированным процессором искусственного интеллекта (ИИ), таким как нейронный процессор (NPU).
[0046] Один или более процессоров управляют обработкой входных данных в соответствии с заданным правилом работы или моделью ИИ, хранящимися в энергонезависимой памяти или энергозависимой памяти. Заданное правило работы или модель ИИ обеспечивается посредством обучения.
[0047] В данном случае обеспечение посредством обучения означает, что, применяя алгоритм обучения ко множеству обучающих данных, создается заданное правило работы или модель ИИ требуемой характеристики. Обучение может быть выполнено в самом устройстве, которое содержит ИИ в соответствии с вариантом осуществления, и/или может быть реализовано через отдельный сервер/систему.
[0048] Модель ИИ может состоять из множества слоев нейронной сети. Каждый слой имеет множество весовых значений и выполняет операцию слоя с использованием вычисления предыдущего слоя и множества весов. Примеры нейронных сетей включают в себя, но не ограничиваются ими, сверочную нейронную сеть (CNN), глубокую нейронную сеть (DNN), рекуррентную нейронную сеть (RNN), ограниченную машину Больцмана (RBM), глубокую сеть доверия (DBN), двунаправленную рекуррентную глубокую нейронную сеть (BRDNN), генеративные состязательные сети (GAN) и глубокие Q-сети.
[0049] Алгоритм обучения является способом обучения заранее заданного целевого устройства (например, автоматического устройства) с использованием множества обучающих данных, чтобы заставлять, позволять или управлять целевым устройством для выполнения определения или предсказания. Примеры алгоритмов обучения включают, но не ограничиваются этим, обучение с учителем, обучение без учителя, обучение частично с учителем или обучение с подкреплением.
[0050] Способ 100 определения оптимального натяжения ремешка 201 носимого устройства 200 для измерения физиологических параметров может выполняться носимым устройством 200, содержащим по меньшей мере ремешок 201, содержащий застежку и отверстия для фиксации ремешка на запястье пользователя, один или более процессоров 205, память 206, вибромотор 204, акселерометр/гироскоп 203 и фотоплетизмографический датчик 202, содержащий по меньшей мере два источника света, длины волн света которых отличаются друг от друга. Вместо акселерометра/гироскопа 203 носимое устройство 200 может содержать любой другой датчик движения. Однако предпочтительно, чтобы носимое устройство 200 содержало акселерометр/гироскоп 203, поскольку он обеспечивает необходимую точность при низком энергопотреблении. Носимое устройство 200 может быть интеллектуальными часами, фитнес-браслетом, а также другим носимым устройством, способным измерять физиологические параметры, например, частоту сердечных сокращений, уровень стресса, артериальное давление, температуру, насыщение крови кислородом, концентрацию гемоглобина, электрокардиограмму, биоимпедансометрию, потоотделение и т.д. Способ 100 определения оптимального натяжения ремешка носимого устройства выполняется при отсутствии повышенной физической активности, представляющей собой выполнение быстрых движений, занятие спортом, быструю ходьбу, бег, плавание и т.д., за исключением этапов определения повышенной физической активности, когда ремешок застегнут на отверстие для оптимального натяжения ремешка без наличия повышенной физической активности.
[0051] Способ 100 определения оптимального натяжения ремешка носимого устройства содержит этап, на котором определяют отверстие на ремешке 201, на которое должен быть застегнут ремешок 201, для оптимального натяжения ремешка 201 для измерения физиологических параметров посредством обработки по меньшей мере сигналов фотоплетизмографии (ФПГ) фотоплетизмографического датчика 202, сигнала акселерометра/гироскопа и сигнала вибромотора.
[0052] Этап определения отверстия на ремешке 201 для оптимального натяжения ремешка 201 для измерения физиологических параметров содержит этапы, на которых: определяют, находится ли отверстие, на которое застегнут ремешок 201, в допустимом диапазоне, состоящем из трех отверстий, включающих в себя отверстие для оптимального натяжения ремешка 201, посредством обработки по меньшей мере сигналов ФПГ; и если отверстие, на которое застегнут ремешок 201, находится в упомянутом допустимом диапазоне, определяют, застегнут ли ремешок 201 на отверстие для оптимального натяжения ремешка 201, посредством обработки сигналов ФПГ, сигнала акселерометра/гироскопа и сигнала вибромотора.
[0053] На фиг. 1 изображена блок-схема последовательности операций для определения, находится ли отверстие, на которое застегнут ремешок 201, в допустимом диапазоне на основании качества сигналов ФПГ. В способе 100 этап определения, находится ли отверстие, на которое застегнут ремешок, в допустимом диапазоне, содержит следующие этапы.
[0054] На этапе S101 одновременно принимают по меньшей мере два сигнала ФПГ, полученные фотоплетизмографическим датчиком 202, содержащим по меньшей мере два источника света, и сигнал акселерометра/гироскопа. Каждый сигнал ФПГ получен с использованием соответствующего источника света из по меньшей мере двух источников света.
[0055] На этапе S103 извлекают признаки сигнала ФПГ из каждого сигнала ФПГ. Признаки сигнала ФПГ состоят из набора амплитуд и фаз гармоник сигнала, полученного посредством оцифровки сигнала ФПГ и преобразования оцифрованного сигнала ФПГ дискретным преобразованием Фурье. Амплитуды и фазы извлекают последовательно, начиная с первой гармоники. Количество извлеченных амплитуд и фаз задается заранее и может быть любым. Признаки сигнала ФПГ также могут быть отобраны методом Relief-F, методом отбора признаков на основе корреляции, методом фильтрации на основе быстрой корреляции, методом последовательного прямого отбора признаков или их комбинации.
[0056] На этапе S105 определяют, являются ли сигналы ФПГ хорошего качества или плохого качества, посредством обработки признаков сигналов ФПГ, извлеченных на этапе S103, обученной моделью искусственного интеллекта (ИИ) для определения качества сигнала. Если сигналы ФПГ являются сигналами ФПГ хорошего качества, то отверстие, на которое застегнут ремешок, находится в допустимом диапазоне.
[0057] Модель ИИ для определения качества сигнала может быть любым классификатором, использующим логистическую регрессию, метод опорных векторов, дерево решений. Модель ИИ для определения качества сигнала обучают на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, с указанием, что признаки сигналов ФПГ, полученных от разных пользователей, относятся к сигналу ФПГ хорошего качества или сигналу ФПГ плохого качества. Признаки сигналов ФПГ и методы их отбора описаны выше в отношении этапа S103.
[0058] На фиг. 2 изображена блок-схема последовательности операций для определения, находится ли отверстие, на которое застегнут ремешок 201, в допустимом диапазоне, на основании сигналов ФПГ плохого качества с артефактами движения. В способе 100 этап определения, находится ли отверстие, на которое застегнут ремешок 201, в допустимом диапазоне, дополнительно содержит следующие этапы.
[0059] На этапе S107 извлекают признаки сигнала акселерометра/гироскопа из сигнала акселерометра/гироскопа. Признаки сигнала акселерометра/гироскопа состоят из наборов амплитуд и фаз составляющих по осям X, Y, Z сигнала акселерометра/гироскопа, полученных посредством оцифровки составляющих по осям X, Y, Z сигнала акселерометра/гироскопа и преобразования оцифрованных составляющих по осям X, Y, Z сигнала акселерометра/гироскопа дискретным преобразованием Фурье. Амплитуды и фазы извлекают последовательно, начиная с первой гармоники. Количество извлеченных амплитуд и фаз задается заранее и может быть любым. Признаки сигнала акселерометра/гироскопа также могут быть отобраны методом Relief-F, методом отбора признаков на основе корреляции, методом фильтрации на основе быстрой корреляции, методом последовательного прямого отбора признаков или их комбинации.
[0060] На этапе S109 определяют, содержатся ли артефакты движения в сигналах ФПГ плохого качества, посредством оценки сигнала акселерометра/гироскопа, принятого одновременно с сигналами ФПГ плохого качества. Если сигнал акселерометра/гироскопа выдает значение ускорения свободного падения, то сигналы ФПГ плохого качества не содержат артефакты движения, а если сигнал акселерометра/гироскопа выдает значение, отличающееся от значения ускорения свободного падения, то сигналы ФПГ плохого качества содержат артефакты движения.
[0061] На этапе S111 если сигналы ФПГ являются сигналами ФПГ плохого качества с артефактами движения, определяют, находится ли отверстие, на которое застегнут ремешок, в упомянутом допустимом диапазоне посредством обработки признаков сигналов ФПГ, извлеченных на этапе S103, и признаков сигнала акселерометра/гироскопа, извлеченных на этапе S107, обученной моделью ИИ для оценки слабого натяжения.
[0062] На этапе S113 если на этапе S111 определено, что отверстие, на которое застегнут ремешок, не находится в упомянутом допустимом диапазоне, выдают обученной моделью ИИ для оценки слабого натяжения уведомление затянуть ремешок. Носимое устройство 200 может выдавать уведомление в виде надписи или изображения, отображаемого на экране носимого устройства 200 или в виде речевого сигнала. После того как пользователь затянул ремешок, определение оптимального натяжения ремешка носимого устройства повторяется с этапа S101.
[0063] Модель ИИ для оценки слабого натяжения может быть любым классификатором, использующим дерево решений, метод случайного леса, метод k-ближайших соседей, метод опорных векторов, наивный байесовский метод, линейный дискриминантный анализ, логистическую регрессию, методы глубокого обучения (искусственные нейронные сети) или их комбинацию. Модель ИИ для оценки слабого натяжения обучают на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, и признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с привязкой упомянутых признаков к положениям на ремешке 201 носимого устройства 200. Положения на ремешке 201 носимого устройства 200 вычисляют по формуле L + χ = D для разных пользователей, где L является диаметром запястья, χ является толщиной носимого устройства и D является положением на ремешке 201. Положение на ремешке 201 совпадает с одним отверстием на ремешке 201. Признаки сигналов ФПГ и методы их отбора описаны выше в отношении этапа S103. Признаки сигналов акселерометра/гироскопа и методы их отбора описаны выше в отношении этапа S107.
[0064] На фиг. 3 изображена блок-схема последовательности операций для определения, находится ли отверстие, на которое застегнут ремешок 201, в допустимом диапазоне, на основании сигналов ФПГ плохого качества без артефактов движения. В способе 100 этап определения, находится ли отверстие, на которое застегнут ремешок 201, в допустимом диапазоне, дополнительно содержит следующие этапы.
[0065] На этапе S115 если сигналы ФПГ являются сигналами ФПГ плохого качества без артефактов движения, определяют, находится ли отверстие, на которое застегнут ремешок, в упомянутом допустимом диапазоне посредством обработки признаков сигналов ФПГ, извлеченных на этапе S103, обученной моделью ИИ для оценки сильного натяжения.
[0066] На этапе S117 если на этапе S115 определено, что отверстие, на которое застегнут ремешок, не находится в упомянутом допустимом диапазоне, выдают обученной моделью ИИ для оценки сильного натяжения уведомление ослабить ремешок. Носимое устройство 200 может выдавать уведомление в виде надписи или изображения, отображаемого на экране носимого устройства 200 или в виде речевого сигнала. После того как пользователь ослабил ремешок, определение оптимального натяжения ремешка носимого устройства повторяется с этапа S101.
[0067] Модель ИИ для оценки сильного натяжения может быть любым классификатором, использующим дерево решений, метод случайного леса, метод k-ближайших соседей, метод опорных векторов, наивный байесовский метод, линейный дискриминантный анализ, логистическую регрессию, методы глубокого обучения (искусственные нейронные сети) или их комбинацию. Модель ИИ для оценки сильного натяжения обучают на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, с привязкой упомянутых признаков к положениям на ремешке 201 носимого устройства 200, вычисленным по формуле L + χ = D для разных пользователей. Положение на ремешке 201 совпадает с одним отверстием на ремешке 201. Признаки сигналов ФПГ и методы их отбора описаны выше в отношении этапа S103.
[0068] Если сигналы ФПГ являются сигналами ФПГ плохого качества без артефактов движения, способ 100 может дополнительно содержать следующие этапы. Оцифровывают сигналы ФПГ, принятые на этапе S101. Выполняют цифровую полосовую фильтрацию оцифрованных сигналов ФПГ в диапазоне 0,5 Гц – 15 Гц. Извлекают признаки оцифрованного фильтрованного сигнала ФПГ из каждого оцифрованного фильтрованного сигнала ФПГ, состоящие из набора амплитуд и фаз сигнала, полученного посредством преобразования оцифрованного фильтрованного сигнала ФПГ дискретным преобразованием Фурье, Признаки оцифрованного фильтрованного сигнала ФПГ соответствуют признакам сигналов ФПГ, описанным выше в отношении этапа S103. Определение, находится ли отверстие, на которое застегнут ремешок 201, в упомянутом допустимом диапазоне, выполняют посредством обработки извлеченных признаков оцифрованных фильтрованных сигналов ФПГ обученной моделью ИИ для оценки сильного натяжения. Цифровая полосовая фильтрация оцифрованных сигналов ФПГ увеличивает отношение сигнал-шум сигналов ФПГ и дополнительно повышает точность определения, находится ли отверстие, на которое застегнут ремешок 201, в упомянутом допустимом диапазоне.
[0069] На фиг. 4 изображена блок-схема последовательности операций для определения, застегнут ли ремешок 201 на отверстие для оптимального натяжения ремешка 201. В способе 100 этап определения, застегнут ли ремешок 201 на отверстие для оптимального натяжения ремешка 201, содержит следующие этапы.
[0070] На этапе S119, если отверстие, на которое застегнут ремешок, находится в упомянутом допустимом диапазоне, включают вибромотор 204 носимого устройства 200.
[0071] На этапе S121 одновременно принимают по меньшей мере два сигнала ФПГ, полученные фотоплетизмографическим датчиком 202, содержащим по меньшей мере два источника света, и сигнал акселерометра/гироскопа. Каждый сигнал ФПГ получен с использованием соответствующего источника света из по меньшей мере двух источников света. Длины волн света источников света отличаются друг от друга.
[0072] На этапе S123 определяют акселерометром/гироскопом 203 участки принятых сигналов ФПГ и участок принятого сигнала акселерометра/гироскопа, которые содержат артефакты движения от вибромотора 204. Частота и амплитуда вибраций вибромотора 204 известны и, следовательно, участки принятых сигналов, содержащие составляющую от вибраций вибромотора 204, можно определить акселерометром/гироскопом 203.
[0073] На этапе S125 извлекают признаки сигнала ФПГ из участка каждого сигнала ФПГ, который содержит артефакты движения от вибромотора 204. Признаки сигналов ФПГ и методы их отбора описаны выше в отношении этапа S103.
[0074] На этапе S127 извлекают признаки сигнала акселерометра/гироскопа из участка сигнала акселерометра/гироскопа, который содержит артефакты движения от вибромотора. Признаки сигнала акселерометра/гироскопа и методы их отбора описаны выше в отношении этапа S107.
[0075] На этапе S129 определяют, застегнут ли ремешок 201 на отверстие для оптимального натяжения ремешка 201, посредством обработки признаков сигналов ФПГ, извлеченных на этапе S125, и признаков сигнала акселерометра/гироскопа, извлеченных на этапе S127, обученной моделью ИИ для оценки оптимального натяжения.
[0076] На этапе S131 если на этапе S129 определено, что ремешок не застегнут на отверстие для оптимального натяжения ремешка, выдают обученной моделью ИИ для оценки оптимального натяжения уведомление ослабить или затянуть ремешок на одно отверстие. Носимое устройство 200 может выдавать уведомление в виде надписи или изображения, отображаемого на экране носимого устройства 200 или в виде речевого сигнала.
[0077] Модель ИИ для оценки оптимального натяжения может быть любым классификатором, использующим дерево решений, метод случайного леса, метод k-ближайших соседей, метод опорных векторов, наивный байесовский метод, линейный дискриминантный анализ, логистическую регрессию, методы глубокого обучения (искусственные нейронные сети) или их комбинацию. Модель ИИ для оценки оптимального натяжения обучают на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, и признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с привязкой упомянутых признаков к положениям на ремешке 201 носимого устройства 200, вычисленным по формуле L + χ = D для разных пользователей. Положение на ремешке 201 совпадает с одним отверстием на ремешке 201. Признаки сигналов ФПГ и методы их отбора описаны выше в отношении этапа S103. Признаки сигналов акселерометра/гироскопа и методы их отбора описаны выше в отношении этапа S107.
[0078] Носимое устройство 200 может содержать биоимпедансометр 207 и способ 100 может дополнительно содержать следующие этапы. Принимают значение импеданса, полученное биоимпедансометром 207 одновременно с по меньшей мере двумя сигналами ФПГ и сигналом акселерометра/гироскопа. Определение, застегнут ли ремешок 201 на отверстие для оптимального натяжения ремешка, выполняют посредством обработки признаков сигналов ФПГ, извлеченных на этапе S125, признаков сигнала акселерометра/гироскопа, извлеченных на этапе S127, и значения импеданса обученной моделью ИИ для оценки оптимального натяжения. Использование значения импеданса, полученного биоимпедансометром 207, для определения для оптимального натяжения ремешка 201 дополнительно повышает точность определения оптимального натяжения ремешка 201.
[0079] Модель ИИ для оценки оптимального натяжения может быть любым классификатором, использующим дерево решений, метод случайного леса, метод k-ближайших соседей, метод опорных векторов, наивный байесовский метод, линейный дискриминантный анализ, логистическую регрессию, методы глубокого обучения (искусственные нейронные сети) или их комбинацию. Модель ИИ для оценки оптимального натяжения обучают на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, и значениях импеданса, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с привязкой упомянутых признаков и значений импеданса к положениям на ремешке 201 носимого устройства 200, вычисленным по формуле L + χ = D для разных пользователей. Положение на ремешке совпадает с одним отверстием на ремешке. Признаки сигналов ФПГ и методы их отбора описаны выше в отношении этапа S103. Признаки сигналов акселерометра/гироскопа и методы их отбора описаны выше в отношении этапа S107.
[0080] Носимое устройство 200 может содержать пьезоэлектрический датчик 208 и способ 100 может дополнительно содержать следующие этапы. Принимают электрический сигнал, полученный пьезоэлектрическим датчиком 208 одновременно с по меньшей мере двумя сигналами ФПГ и сигналом акселерометра/гироскопа. Определение, застегнут ли ремешок на отверстие для оптимального натяжения ремешка, выполняют посредством обработки признаков сигналов ФПГ, извлеченных на этапе S125, признаков сигнала акселерометра/гироскопа, извлеченных на этапе S127, и электрического сигнала обученной моделью ИИ для оценки оптимального натяжения. Использование электрического сигнала, полученного пьезоэлектрическим датчиком 208, для определения для оптимального натяжения ремешка 201 дополнительно повышает точность определения оптимального натяжения ремешка 201.
[0081] Модель ИИ для оценки оптимального натяжения может быть любым классификатором, использующим дерево решений, метод случайного леса, метод k-ближайших соседей, метод опорных векторов, наивный байесовский метод, линейный дискриминантный анализ, логистическую регрессию, методы глубокого обучения (искусственные нейронные сети) или их комбинацию. Модель ИИ для оценки оптимального натяжения обучают на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, и электрических сигналах, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с привязкой упомянутых признаков и электрических сигналов к положениям на ремешке 201 носимого устройства 200, вычисленным по формуле L + χ = D для разных пользователей. Положение на ремешке 201 совпадает с одним отверстием на ремешке 201. Признаки сигналов ФПГ и методы их отбора описаны выше в отношении этапа S103. Признаки сигналов акселерометра/гироскопа и методы их отбора описаны выше в отношении этапа S107.
[0082] Способ 100 может дополнительно содержать следующие этапы, которые выполняются, когда ремешок 201 застегнут на отверстие для оптимального натяжения ремешка 201. Одновременно принимают по меньшей мере два сигнала ФПГ, полученные фотоплетизмографическим датчиком 202, содержащим по меньшей мере два источника света, и сигнал акселерометра/гироскопа. Каждый сигнал ФПГ получен с использованием соответствующего источника света из по меньшей мере двух источников света. Извлекают признаки сигнала ФПГ из каждого сигнала ФПГ. Признаки сигнала ФПГ состоят из набора амплитуд и фаз сигнала, полученного посредством оцифровки сигнала ФПГ и преобразования оцифрованного сигнала ФПГ дискретным преобразованием Фурье. Признаки сигналов ФПГ и методы их отбора описаны выше в отношении этапа S103. Извлекают признаки сигнала акселерометра/гироскопа из сигнала акселерометра/гироскопа. Признаки сигнала акселерометра/гироскопа состоят из наборов амплитуд и фаз составляющих по осям X, Y, Z сигнала акселерометра/гироскопа, полученных посредством оцифровки составляющих по осям X, Y, Z сигнала акселерометра/гироскопа и преобразования оцифрованных составляющих по осям X, Y, Z сигнала акселерометра/гироскопа дискретным преобразованием Фурье. Признаки сигналов акселерометра/гироскопа и методы их отбора описаны выше в отношении этапа S107. Определяют, присутствует ли повышенная физическая активность в действиях пользователя носимого устройства 200, посредством обработки признаков сигналов ФПГ и признаков сигнала акселерометра/гироскопа обученной моделью ИИ для определения повышенной физической активности. Повышенная физическая активность представляет собой выполнение быстрых движений, занятие спортом, быструю ходьбу, бег, плавание и т.д. Если определено, что повышенная физическая активность присутствует, выдают обученной моделью ИИ для определения повышенной физической активности уведомление затянуть ремешок 201 на одно отверстие. Носимое устройство 200 может выдавать уведомление в виде надписи или изображения, отображаемого на экране носимого устройства 200 или в виде речевого сигнала. Признаки сигналов ФПГ и методы их отбора описаны выше в отношении этапа S103. Признаки сигналов акселерометра/гироскопа и методы их отбора описаны выше в отношении этапа S107.
[0083] Модель ИИ для определения повышенной физической активности может быть любым классификатором, использующим дерево решений, метод случайного леса, метод k-ближайших соседей, метод опорных векторов, наивный байесовский метод, линейный дискриминантный анализ, логистическую регрессию, методы глубокого обучения (искусственные нейронные сети) или их комбинацию. Модель ИИ для определения повышенной физической активности обучают на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, и признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с указанием, что признаки сигналов ФПГ и признаки сигналов акселерометра/гироскопа относятся к повышенной физической активности или не относятся к повышенной физической активности. Признаки сигналов ФПГ и методы их отбора описаны выше в отношении этапа S103. Признаки сигналов акселерометра/гироскопа и методы их отбора описаны выше в отношении этапа S107.
[0084] На фиг. 5 изображена блок-схема носимого устройства 200 согласно варианту осуществления. Носимое устройство 200 с функцией измерения физиологических параметров содержит ремешок 201, фотоплетизмографический датчик 202, акселерометр/гироскоп 203, вибромотор 204, по меньшей мере один процессор 205 и память 206.
[0085] Ремешок 201 содержит застежку и отверстия для фиксации ремешка 201 на запястье пользователя. Вибромотор 204 обеспечивает вибрацию носимого устройства 200. Акселерометр/гироскоп 203 считывает перемещение носимого устройства 200. Фотоплетизмографический датчик 202 содержит по меньшей мере два источника света. Источники света могут быть любыми источниками света, подходящими для встраивания в фотоплетизмографический датчик 202 и получения сигналов ФПГ. Длины волн света источников света отличаются друг от друга. Цвет сечения источников света может быть любым подходящим для получения сигналов ФПГ. По меньшей мере один процессор 205 выполняет способ 100 определения оптимального натяжения ремешка 201 носимого устройства 200. Память 206 хранит числовые параметры обученной модели искусственного интеллекта (ИИ) для определения качества сигнала, обученной модели ИИ для оценки слабого натяжения, обученной модели ИИ для оценки сильного натяжения, обученной модели ИИ для оценки оптимального натяжения, обученной модели ИИ для определения повышенной физической активности и инструкции, которые при выполнении по меньшей мере одним процессором, заставляют по меньшей мере один процессор выполнять способ 100 определения оптимального натяжения ремешка 201 носимого устройства 200.
[0086] В другом варианте осуществления по меньшей мере один процессор носимого устройства 200 дополнительно выполнен с возможностью цифровой полосовой фильтрации оцифрованных сигналов ФПГ в диапазоне 0,5 Гц – 15 Гц.
[0087] На фиг. 6 изображена блок-схема носимого устройства 200 согласно еще одному варианту осуществления. В этом варианте осуществления носимое устройство 200 дополнительно содержит биоимпедансометр 207 для получения значения импеданса одновременно с по меньшей мере двумя сигналами ФПГ и сигналом акселерометра/гироскопа.
[0088] На фиг. 7 изображена блок-схема носимого устройства 200 согласно еще одному варианту осуществления. В этом варианте осуществления носимое устройство 200 дополнительно содержит пьезоэлектрический датчик 208 для получения электрического сигнала одновременно с по меньшей мере двумя сигналами ФПГ и сигналом акселерометра/гироскопа.
[0089] Настоящее изобретение может применяться в интеллектуальных часах, фитнес-браслетах, а также других носимых устройствах, способных измерять физиологические параметры, например, частоту сердечных сокращений, уровень стресса, артериальное давление, температуру, насыщение крови кислородом, концентрацию гемоглобина, электрокардиограмму, биоимпедансометрию, потоотделение и т.д.
[0090] Вышеприведенные описания вариантов осуществления изобретения являются иллюстративными, и модификации конфигурации и реализации не выходят за пределы объема настоящего описания. Например, хотя варианты осуществления изобретения описаны, в общем, в связи с фигурами 1-7, приведенные описания являются примерными. Хотя предмет изобретения описан на языке, характерном для конструктивных признаков или методологических операций, понятно, что предмет изобретения не обязательно ограничен конкретными вышеописанными признаками или операциями. Более того, конкретные вышеописанные признаки и операции раскрыты как примерные формы реализации формулы изобретения. Изобретение не ограничено также показанным порядком этапов способа, порядок может быть видоизменен специалистом без новаторских нововведений. Некоторые или все этапы способа могут выполняться последовательно или параллельно.
[0091] Соответственно предполагается, что объем вариантов осуществления изобретения ограничивается только нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФИЗИОЛОГИЧЕСКОГО ПАРАМЕТРА С ИСПОЛЬЗОВАНИЕМ НОСИМОГО ДАТЧИКА | 2018 |
|
RU2772849C2 |
| НОСИМОЕ УСТРОЙСТВО, СПОСОБ И СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ КРОВИ | 2023 |
|
RU2821143C1 |
| НОСИМОЕ УСТРОЙСТВО С ФУНКЦИЕЙ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ГЕМОГЛОБИНА, СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ГЕМОГЛОБИНА | 2023 |
|
RU2805810C1 |
| НОСИМОЕ УСТРОЙСТВО С ФУНКЦИЕЙ ОПРЕДЕЛЕНИЯ ЦЕНТРАЛЬНОЙ ТЕМПЕРАТУРЫ ТЕЛА ПОЛЬЗОВАТЕЛЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРАЛЬНОЙ ТЕМПЕРАТУРЫ ТЕЛА ПОЛЬЗОВАТЕЛЯ С ПОМОЩЬЮ НОСИМОГО УСТРОЙСТВА И СИСТЕМА, СОДЕРЖАЩАЯ НОСИМОЕ УСТРОЙСТВО | 2023 |
|
RU2804226C1 |
| РЕГУЛИРУЕМОЕ СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2012 |
|
RU2618296C2 |
| НОСИМОЕ УСТРОЙСТВО, СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УРОВНЯ ГЛИКИРОВАННОГО ГЕМОГЛОБИНА | 2024 |
|
RU2832523C1 |
| ДЕЛЕГИРОВАНИЕ ОБРАБОТКИ ИЗ НОСИМОГО ЭЛЕКТРОННОГО УСТРОЙСТВА | 2013 |
|
RU2621975C2 |
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ИЗМЕРЕНИЯ ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ ЧЕЛОВЕКА | 2017 |
|
RU2670670C9 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ УСТРОЙСТВАМИ С ПОМОЩЬЮ ЭЛЕКТРОМИОГРАФИЧЕСКОГО УСТРОЙСТВА СЧИТЫВАНИЯ | 2017 |
|
RU2683859C1 |
| Носимое сенсорное устройство для распознавания двигательной активности руки и жестов кисти | 2024 |
|
RU2818515C1 |


Группа изобретений относится к способу определения оптимального натяжения ремешка носимого устройства для измерения физиологических параметров и носимому устройству с функцией измерения физиологических параметров. Предлагается способ определения оптимального натяжения ремешка носимого устройства для измерения физиологических параметров, в котром ремешок содержит застежку и отверстия для фиксации ремешка на запястье пользователя, носимое устройство содержит по меньшей мере один процессор, память, вибромотор, акселерометр/гироскоп и фотоплетизмографический датчик, содержащий по меньшей мере два источника света, длины волн света которых отличаются друг от друга. Способ содержит этап, на котором определяют отверстие на ремешке, на которое должен быть застегнут ремешок, для оптимального натяжения ремешка для измерения физиологических параметров посредством обработки по меньшей мере сигналов фотоплетизмографии фотоплетизмографического датчика, сигнала акселерометра/гироскопа и сигнала вибромотора. Изобретения обеспечивают увеличение точности измерения физиологических параметров. 2 н. и 19 з.п. ф-лы, 7 ил.
1. Способ определения оптимального натяжения ремешка носимого устройства для измерения физиологических параметров, причем ремешок содержит застежку и отверстия для фиксации ремешка на запястье пользователя, носимое устройство содержит по меньшей мере один процессор, память, вибромотор, акселерометр/гироскоп и фотоплетизмографический датчик, содержащий по меньшей мере два источника света, длины волн света которых отличаются друг от друга, при этом способ содержит этап, на котором
определяют отверстие на ремешке, на которое должен быть застегнут ремешок, для оптимального натяжения ремешка для измерения физиологических параметров посредством обработки по меньшей мере сигналов фотоплетизмографии (ФПГ) фотоплетизмографического датчика, сигнала акселерометра/гироскопа и сигнала вибромотора.
2. Способ по п. 1, в котором этап определения отверстия на ремешке для оптимального натяжения ремешка для измерения физиологических параметров содержит этапы, на которых:
определяют, находится ли отверстие, на которое застегнут ремешок, в допустимом диапазоне, состоящем из трех отверстий, включающих в себя отверстие для оптимального натяжения ремешка, посредством обработки по меньшей мере сигналов ФПГ; и,
если отверстие, на которое застегнут ремешок, находится в упомянутом допустимом диапазоне, определяют, застегнут ли ремешок на отверстие для оптимального натяжения ремешка, посредством обработки сигналов ФПГ, сигнала акселерометра/гироскопа и сигнала вибромотора.
3. Способ по п. 2, в котором этап определения, находится ли отверстие, на которое застегнут ремешок, в допустимом диапазоне, содержит этапы, на которых:
одновременно принимают (S101) по меньшей мере два сигнала ФПГ, полученные фотоплетизмографическим датчиком, содержащим по меньшей мере два источника света, и сигнал акселерометра/гироскопа, причем каждый сигнал ФПГ получен с использованием соответствующего источника света из по меньшей мере двух источников света;
извлекают (S103) признаки сигнала ФПГ из каждого сигнала ФПГ, состоящие из набора амплитуд и фаз сигнала, полученного посредством оцифровки сигнала ФПГ и преобразования оцифрованного сигнала ФПГ дискретным преобразованием Фурье;
определяют (S105), являются ли сигналы ФПГ хорошего качества или плохого качества, посредством обработки извлеченных признаков сигналов ФПГ обученной моделью искусственного интеллекта (ИИ) для определения качества сигнала, при этом сигналы ФПГ хорошего качества являются сигналами ФПГ, полученными, когда отверстие, на которое застегнут ремешок, находится в допустимом диапазоне, а сигналы ФПГ плохого качества являются сигналами ФПГ, полученными, когда ремешок имеет слабое или сильное натяжение, причем слабое натяжение ремешка является натяжением, при котором получают сигналы ФПГ с артефактами движения, а сильное натяжение ремешка является натяжением, при котором сигналы ФПГ не отражают действительные физиологические параметры из-за помехи кровотоку, и если сигналы ФПГ являются сигналами ФПГ хорошего качества, то отверстие, на которое застегнут ремешок, находится в допустимом диапазоне.
4. Способ по п. 3, в котором обученная модель ИИ для определения качества сигнала обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, с указанием, что признаки сигналов ФПГ, полученных от разных пользователей, относятся к сигналу ФПГ хорошего качества или сигналу ФПГ плохого качества.
5. Способ по п. 3 или 4, в котором этап определения, находится ли отверстие, на которое застегнут ремешок, в допустимом диапазоне, дополнительно содержит этапы, на которых:
извлекают (S107) признаки сигнала акселерометра/гироскопа из сигнала акселерометра/гироскопа, состоящие из наборов амплитуд и фаз составляющих по осям X, Y, Z сигнала акселерометра/гироскопа, полученных посредством оцифровки составляющих по осям X, Y, Z сигнала акселерометра/гироскопа и преобразования оцифрованных составляющих по осям X, Y, Z сигнала акселерометра/гироскопа дискретным преобразованием Фурье;
определяют (S109), содержатся ли артефакты движения в сигналах ФПГ плохого качества, посредством оценки сигнала акселерометра/гироскопа, принятого одновременно с сигналами ФПГ плохого качества, при этом если сигнал акселерометра/гироскопа выдает значение ускорения свободного падения, то сигналы ФПГ плохого качества не содержат артефакты движения, а если сигнал акселерометра/гироскопа выдает значение, отличающееся от значения ускорения свободного падения, то сигналы ФПГ плохого качества содержат артефакты движения;
если сигналы ФПГ являются сигналами ФПГ плохого качества с артефактами движения, определяют (S111), находится ли отверстие, на которое застегнут ремешок, в упомянутом допустимом диапазоне, посредством обработки извлеченных признаков сигналов ФПГ и извлеченных признаков сигнала акселерометра/гироскопа обученной моделью ИИ для оценки слабого натяжения;
если на этапе S111 определено, что отверстие, на которое застегнут ремешок, не находится в упомянутом допустимом диапазоне, выдают (S113) обученной моделью ИИ для оценки слабого натяжения уведомление затянуть ремешок, при этом, после того как пользователь затянул ремешок, определение оптимального натяжения ремешка носимого устройства повторяется с этапа S101.
6. Способ по п. 5, в котором обученная модель ИИ для оценки слабого натяжения обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, и признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с привязкой упомянутых признаков к положениям на ремешке носимого устройства, вычисленным по формуле L + 
L является диаметром запястья;

D является положением на ремешке;
при этом положение на ремешке совпадает с одним отверстием на ремешке.
7. Способ по п. 5 или 6, в котором этап определения, находится ли отверстие, на которое застегнут ремешок, в допустимом диапазоне, дополнительно содержит этапы, на которых:
если сигналы ФПГ являются сигналами ФПГ плохого качества без артефактов движения, определяют (S115), находится ли отверстие, на которое застегнут ремешок, в упомянутом допустимом диапазоне, посредством обработки извлеченных признаков сигналов ФПГ обученной моделью ИИ для оценки сильного натяжения;
если на этапе S115 определено, что отверстие, на которое застегнут ремешок, не находится в упомянутом допустимом диапазоне, выдают (S117) обученной моделью ИИ для оценки сильного натяжения уведомление ослабить ремешок, при этом, после того как пользователь ослабил ремешок, определение оптимального натяжения ремешка носимого устройства повторяется с этапа S101.
8. Способ по п. 7, в котором обученная модель ИИ для оценки сильного натяжения обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, с привязкой упомянутых признаков к положениям на ремешке носимого устройства, вычисленным по формуле L +
L является диаметром запястья;
D является положением на ремешке;
при этом положение на ремешке совпадает с одним отверстием на ремешке.
9. Способ по п. 8, дополнительно содержащий этапы, на которых:
если сигналы ФПГ являются сигналами ФПГ плохого качества без артефактов движения,
оцифровывают сигналы ФПГ;
выполняют цифровую полосовую фильтрацию оцифрованных сигналов ФПГ в диапазоне 0,5 – 15 Гц; и
извлекают признаки оцифрованного фильтрованного сигнала ФПГ из каждого оцифрованного фильтрованного сигнала ФПГ, состоящие из набора амплитуд и фаз сигнала, полученного посредством преобразования оцифрованного фильтрованного сигнала ФПГ дискретным преобразованием Фурье,
при этом определение, находится ли отверстие, на которое застегнут ремешок, в упомянутом допустимом диапазоне, выполняют посредством обработки извлеченных признаков оцифрованных фильтрованных сигналов ФПГ обученной моделью ИИ для оценки сильного натяжения.
10. Способ по любому из пп. 2-9, в котором этап определения, застегнут ли ремешок на отверстие для оптимального натяжения ремешка, содержит этапы, на которых:
если отверстие, на которое застегнут ремешок, находится в упомянутом допустимом диапазоне, включают (S119) вибромотор носимого устройства;
одновременно принимают (S121) по меньшей мере два сигнала ФПГ, полученные фотоплетизмографическим датчиком, содержащим по меньшей мере два источника света, и сигнал акселерометра/гироскопа, причем каждый сигнал ФПГ получен с использованием соответствующего источника света из по меньшей мере двух источников света и длины волн света источников света отличаются друг от друга;
определяют (S123) акселерометром/гироскопом участки принятых сигналов ФПГ и участок принятого сигнала акселерометра/гироскопа, которые содержат артефакты движения от вибромотора;
извлекают (S125) признаки сигнала ФПГ из участка каждого сигнала ФПГ, который содержит артефакты движения от вибромотора, причем признаки сигнала ФПГ состоят из набора амплитуд и фаз сигнала, полученного посредством оцифровки сигнала ФПГ и преобразования оцифрованного сигнала ФПГ дискретным преобразованием Фурье;
извлекают (S127) признаки сигнала акселерометра/гироскопа из участка сигнала акселерометра/гироскопа, который содержит артефакты движения от вибромотора, причем признаки сигнала акселерометра/гироскопа состоят из наборов амплитуд и фаз составляющих по осям X, Y, Z сигнала акселерометра/гироскопа, полученных посредством оцифровки составляющих по осям X, Y, Z сигнала акселерометра/гироскопа и преобразования оцифрованных составляющих по осям X, Y, Z сигнала акселерометра/гироскопа дискретным преобразованием Фурье;
определяют (S129), застегнут ли ремешок на отверстие для оптимального натяжения ремешка, посредством обработки извлеченных признаков сигналов ФПГ и извлеченных признаков сигнала акселерометра/гироскопа обученной моделью ИИ для оценки оптимального натяжения; и,
если на этапе S129 определено, что ремешок не застегнут на отверстие для оптимального натяжения ремешка, выдают (S131) обученной моделью ИИ для оценки оптимального натяжения уведомление ослабить или затянуть ремешок на одно отверстие.
11. Способ по п. 10, в котором обученная модель ИИ для оценки оптимального натяжения обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, и признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с привязкой упомянутых признаков к положениям на ремешке носимого устройства, вычисленным по формуле L +
L является диаметром запястья;
D является положением на ремешке;
при этом положение на ремешке совпадает с одним отверстием на ремешке.
12. Способ по п. 10 или 11, дополнительно содержащий этапы, на которых
принимают значение импеданса, полученное биоимпедансометром одновременно с по меньшей мере двумя сигналами ФПГ и сигналом акселерометра/гироскопа;
при этом определение, застегнут ли ремешок на отверстие для оптимального натяжения ремешка, выполняют посредством обработки извлеченных признаков сигналов ФПГ, извлеченных признаков сигнала акселерометра/гироскопа и значения импеданса обученной моделью ИИ для оценки оптимального натяжения.
13. Способ по п. 12, в котором обученная модель ИИ для оценки оптимального натяжения обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, и значениях импеданса, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с привязкой упомянутых признаков и значений импеданса к положениям на ремешке носимого устройства, вычисленным по формуле L +
L является диаметром запястья;
D является положением на ремешке;
при этом положение на ремешке совпадает с одним отверстием на ремешке.
14. Способ по п. 10 или 11, дополнительно содержащий этапы, на которых
принимают электрический сигнал, полученный пьезоэлектрическим датчиком одновременно с по меньшей мере двумя сигналами ФПГ и сигналом акселерометра/гироскопа;
при этом определение, застегнут ли ремешок на отверстие для оптимального натяжения ремешка, выполняют посредством обработки извлеченных признаков сигналов ФПГ, извлеченных признаков сигнала акселерометра/гироскопа и электрического сигнала обученной моделью ИИ для оценки оптимального натяжения.
15. Способ по п. 14, в котором обученная модель ИИ для оценки оптимального натяжения обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, и электрических сигналах, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с привязкой упомянутых признаков и электрических сигналов к положениям на ремешке носимого устройства, вычисленным по формуле L +
L является диаметром запястья;
D является положением на ремешке;
при этом положение на ремешке совпадает с одним отверстием на ремешке.
16. Способ по любому из пп. 10-15, дополнительно содержащий этапы, на которых:
когда ремешок застегнут на отверстие для оптимального натяжения ремешка,
одновременно принимают по меньшей мере два сигнала ФПГ, полученные фотоплетизмографическим датчиком, содержащим по меньшей мере два источника света, и сигнал акселерометра/гироскопа, причем каждый сигнал ФПГ получен с использованием соответствующего источника света из по меньшей мере двух источников света;
извлекают признаки сигнала ФПГ из каждого сигнала ФПГ, состоящие из набора амплитуд и фаз сигнала, полученного посредством оцифровки сигнала ФПГ и преобразования оцифрованного сигнала ФПГ дискретным преобразованием Фурье;
извлекают признаки сигнала акселерометра/гироскопа из сигнала акселерометра/гироскопа, состоящие из наборов амплитуд и фаз составляющих по осям X, Y, Z сигнала акселерометра/гироскопа, полученных посредством оцифровки составляющих по осям X, Y, Z сигнала акселерометра/гироскопа и преобразования оцифрованных составляющих по осям X, Y, Z сигнала акселерометра/гироскопа дискретным преобразованием Фурье;
определяют, присутствует ли повышенная физическая активность в действиях пользователя носимого устройства, посредством обработки извлеченных признаков сигналов ФПГ и извлеченных признаков сигнала акселерометра/гироскопа обученной моделью ИИ для определения повышенной физической активности; и,
если определено, что повышенная физическая активность присутствует, выдают обученной моделью ИИ для определения повышенной физической активности уведомление затянуть ремешок на одно отверстие.
17. Способ по п. 16, в котором обученная модель ИИ для определения повышенной физической активности обучена на признаках сигналов ФПГ хорошего качества и сигналов ФПГ плохого качества, полученных от разных пользователей, и признаках сигналов акселерометра/гироскопа, принятых одновременно с упомянутыми сигналами ФПГ, полученными от разных пользователей, с указанием, что признаки сигналов ФПГ и признаки сигналов акселерометра/гироскопа относятся к повышенной физической активности или не относятся к повышенной физической активности.
18. Носимое устройство с функцией измерения физиологических параметров, содержащее:
ремешок, содержащий застежку и отверстия для фиксации ремешка на запястье пользователя;
вибромотор;
акселерометр/гироскоп;
фотоплетизмографический датчик, содержащий по меньшей мере два источника света, длины волн света которых отличаются друг от друга;
по меньшей мере один процессор; и
память, в которой хранятся числовые параметры обученной модели искусственного интеллекта (ИИ) для определения качества сигнала, обученной модели ИИ для оценки слабого натяжения, обученной модели ИИ для оценки сильного натяжения, обученной модели ИИ для оценки оптимального натяжения, обученной модели ИИ для определения повышенной физической активности и инструкции, которые при выполнении по меньшей мере одним процессором заставляют по меньшей мере один процессор выполнять способ по любому из пп. 1-17.
19. Носимое устройство по п. 18, в котором по меньшей мере один процессор дополнительно выполнен с возможностью цифровой полосовой фильтрации оцифрованных сигналов ФПГ в диапазоне 0,5 – 15 Гц.
20. Носимое устройство по п. 18 или 19, дополнительно содержащее биоимпедансометр для получения значения импеданса одновременно с по меньшей мере двумя сигналами ФПГ и сигналом акселерометра/гироскопа.
21. Носимое устройство по п. 18 или 19, дополнительно содержащее пьезоэлектрический датчик для получения электрического сигнала одновременно с по меньшей мере двумя сигналами ФПГ и сигналом акселерометра/гироскопа.
| Токарный резец | 1924 |
|
SU2016A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| CN 104027103 A, 10.09.2014 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| KR 20180024570 A, 08.03.2018 | |||
| RU 197524 U1, 12.05.2020 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
