ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Настоящая заявка испрашивает приоритет заявки на патент Китая № 201911299139.X, озаглавленной «CONTROLLABLE GUIDING DEVICE FOR IMPLANTABLE APPARATUS», поданной 17 декабря 2019 г., которая включена в данный документ посредством ссылки во всей своей полноте.
ОБЛАСТЬ ТЕХНИКИ
Эта настоящая заявка относится к медицинскому аппарату и, в частности, к системе для управляемого имплантирования искусственного атриовентрикулярного клапана.
УРОВЕНЬ ТЕХНИКИ
Малоинвазивное транскатетерное лечение постепенно стало основным методом лечения сердечно-сосудистых заболеваний. Сердечно-сосудистый имплантируемый аппарат, такой как коронарный стент, клапан сердца, окклюзионное устройство, стент магистрального сосуда или т. п., нуждается в доставке в нужное положение в теле человека посредством устройства доставки. Имплантируемый аппарат нуждается в фиксации в целевом положении, и фиксация искусственного клапана сердца является особо важной. В традиционной технологии фиксации аортального клапана и клапана легочного ствола в основном полагаются на радиальную опорную силу клапанного стента. Клапанный стент снабжен зажимным элементом, выступом, углублением или т. п., что позволяет воспользоваться преимуществом формы и характеристик анатомической структуры для реализации фиксации. Для обеспечения фиксаций створки митрального клапана и створки трикуспидального клапана часто в дополнение к радиальной опорной силе предусмотрены вспомогательные устройства фиксации, такие как шипы, крючки, зажимы для створок, кольцевые зажимы, проволоки для фиксации на верхушке сердца и стержни для фиксации на верхушке сердца. Однако из-за сложных анатомических структур митрального клапана и трехстворчатого клапана, если при фиксациях полагаться только на радиальную опору клапанного стента и вспомогательные устройства фиксации, то, с одной стороны, будет существенно затронуто родное кольцо клапана, что будет затруднять диастолическое и систолическое движения сердца, что не является удовлетворительным решением проблемы фиксации, и, с другой стороны, для малоинвазивных транскатетерных продуктов, ограниченных диаметром и рабочими характеристиками катетера, сложно обеспечить эффективную и относительно гибкую структуру в имплантируемом аппарате для фиксации к целевой анатомической структуре.
В патенте CN 201410316922.3 описана восстанавливающая система для предотвращения недостаточности клапана с помощью фиксирующего устройства. Устройство, размыкающее фиксатор, содержит доставочную трубку и толкающий стержень. Устройство, размыкающее фиксатор, и фиксирующий блок соединены с возможностью отсоединения. Часть в виде дальнего конца устройства, размыкающего фиксатор, имеет заранее заданную форму, такую, что часть в виде дальнего конца доставочной трубки может изгибаться в целом или частично для облегчения примыкания самого дальнего конца доставочной трубки к фиксирующему блоку или аутологической ткани до перемещения фиксатора. В этом решении операция разъемного соединения между устройством, размыкающим фиксатор, и фиксирующим блоком является относительно сложной, требующей высокой точности и трудной для сборки. Более того, после втягивания оболочки положение разъемного соединения подвергается сильному воздействию, в результате которого легко повредить имплантируемый аппарат и устройство, размыкающее фиксатор. Перед фиксацией степень изгиба доставочной трубки должна быть зафиксирована посредством опорной структуры, иначе дальний конец доставочной трубки сложно соединить впритык с фиксирующим блоком. В процессе втягивания и высвобождения оболочки по мере изменения длины доставочной трубки перед фиксацией может существовать зазор между дальним концом доставочной трубки и фиксирующим блоком, что приводит к непрочному креплению, что будет негативно влиять на эффект фиксации и приведет к хирургическому вмешательству высокого риска. Для имплантируемого аппарата, требующего фиксации в нескольких точках, это решение требует несколько доставочных трубок, что приводит к более сложной структуре и увеличению диаметра доставочной трубки. Более того, невозможно выполнить повторную фиксацию после того, как операция фиксации завершена, и хирургический риск является высоким.
Ввиду этого существует необходимость в разработке системы доставки имплантируемого аппарата, а также устройства фиксации с простой структурой, эффективной работой и высокой безопасностью.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Учитывая упомянутые выше недостатки традиционной технологии, техническая проблема, которую должна решить настоящая заявка, заключается в предоставлении системы для управляемого имплантирования искусственного атриовентрикулярного клапана с простой структурой, небольшим диаметром катетера, точным позиционированием и безопасной и надежной фиксацией.
Цель настоящей заявки может быть достигнута с помощью следующего технического решения.
Система для управляемого имплантирования искусственного атриовентрикулярного клапана содержит имплантируемый искусственный атриовентрикулярный клапан, доставочный катетер и рукоятку управления, а также дополнительно содержит направляющий катетер и ограничивающую положение проволоку. Имплантируемый искусственный атриовентрикулярный клапан содержит подлежащий фиксации элемент. Ограничивающая положение проволока соединена с возможностью отсоединения с имплантируемым искусственным атриовентрикулярным клапаном. Ближний конец ограничивающей положение проволоки соединен с рукояткой управления. Дальний конец направляющего катетера снабжен направляющим элементом. Часть в виде дальнего конца направляющего катетера выполнена с возможностью сгибания. Ближний конец доставочного катетера и ближний конец направляющего катетера соответственно соединены с рукояткой управления. В собранном состоянии направляющий катетер и ограничивающая положение проволока размещены в доставочном катетере, при этом ограничивающая положение проволока проходит через направляющий элемент. Рукоятка управления выполнена с возможностью перемещения направляющего элемента на направляющем катетере вдоль ограничивающей положение проволоки в направлении дальнего конца, при этом часть в виде дальнего конца направляющего катетера выполнена с возможностью сгибания и деформирования, а дальний конец направляющего катетера выполнен с возможностью примыкания к подлежащему фиксации элементу имплантируемого искусственного атриовентрикулярного клапана.
Цель настоящей заявки может быть дополнительно достигнута с помощью следующих технических решений.
В варианте осуществления система для управляемого имплантирования искусственного атриовентрикулярного клапана дополнительно содержит фиксатор и толкатель фиксатора. В собранном состоянии фиксатор и толкатель фиксатора размещены в направляющем катетере. Толкатель фиксатора выполнен с возможностью толкания фиксатора, при этом фиксатор выполнен с возможностью перемещения в направлении дальнего конца и прикрепления подлежащего фиксации элемента имплантируемого искусственного атриовентрикулярного клапана к целевой ткани.
В варианте осуществления система для управляемого имплантирования искусственного атриовентрикулярного клапана дополнительно содержит управляющий стержень. Дальний конец ограничивающей положение проволоки имеет удерживающее кольцо. Имплантируемый искусственный атриовентрикулярный клапан содержит соединительное кольцо. Ближний конец управляющего стержня соединен с рукояткой управления. В собранном состоянии удерживающее кольцо проходит через соединительное кольцо имплантируемого искусственного атриовентрикулярного клапана, а затем дальний конец управляющего стержня вставлен в удерживающее кольцо. Рукоятка управления выполнена с возможностью натяжения и фиксации ограничивающей положение проволоки с образованием соединения между имплантируемым искусственным атриовентрикулярным клапаном, ограничивающей положение проволокой, управляющим стержнем и направляющим катетером. Рукоятка управления выполнена с возможностью перемещения управляющего стержня в осевом направлении, при этом дальний конец управляющего стержня выполнен с возможностью отсоединения от удерживающего кольца, а имплантируемый искусственный атриовентрикулярный клапан выполнен с возможностью высвобождения из ограничивающей положение проволоки.
В варианте осуществления дальний конец управляющего стержня представляет собой конец, предотвращающий отсоединение, и при этом конец, предотвращающий отсоединение, представляет собой перевернутую коническую структуру, Y-образную структуру, волнообразную структуру или сжимаемую круглую структуру.
В варианте осуществления удерживающее кольцо на дальнем конце ограничивающей положение проволоки представляет собой сжимаемую круглую структуру или U-образное кольцо, образованное из сложенных несколько раз проволок.
В варианте осуществления направляющий элемент жестко соединен с направляющим катетером. Направляющий элемент расположен на дальнем конце направляющего катетера. Направляющий элемент содержит направляющее отверстие. В собранном состоянии дальний конец ограничивающей положение проволоки сначала проходит через направляющее отверстие, а затем проходит через соединительное кольцо.
В варианте осуществления направляющий элемент и направляющий катетер соединены вместе как одна деталь.
В варианте осуществления управляющий стержень проходит через направляющее отверстие в направляющем элементе.
В варианте осуществления направляющий элемент жестко соединен с дальним концом управляющего стержня, при этом направляющий элемент содержит направляющее отверстие. В собранном состоянии дальний конец ограничивающей положение проволоки сначала проходит через направляющее отверстие, а затем проходит через соединительное кольцо.
В варианте осуществления направляющий катетер проходит через направляющее отверстие в направляющем элементе.
В варианте осуществления подлежащий фиксации элемент интегрирован с имплантируемым искусственным атриовентрикулярным клапаном.
В варианте осуществления подлежащий фиксации элемент представляет собой гибкую деталь. Один конец подлежащего фиксации элемента соединен с имплантируемым искусственным атриовентрикулярным клапаном. В варианте осуществления гибкая деталь является деформируемой и выполнена из мягкого материала.
В варианте осуществления подлежащий фиксации элемент содержит опорную сетку.
В варианте осуществления имплантируемый искусственный атриовентрикулярный клапан содержит каркас, и подлежащий фиксации элемент размещен на каркасе.
По сравнению с традиционной технологией преимущества вариантов осуществления настоящей заявки состоят в следующем:
1. Структура является простой, а работа удобной. Одна ограничивающая положение проволока может выполнять множество функций, таких как направление, сгибание, позиционирование и натяжение, при этом она является отсоединяемой.
2. Ограничивающая положение проволока выполняет функцию направляющей для направления и ограничения перемещения направляющего катетера в конкретном направлении, что имеет следующие преимущества: с одной стороны, требование к положению направляющего катетера в сборке снижено, сложность сборки уменьшена, а направляющий катетер и ограничивающая положение проволока соединены с возможностью перемещения. Между различными частями отсутствует внутреннее напряжение, что уменьшает повреждение продукта. С другой стороны, если фиксирующее положение или фиксирующий эффект не являются желательными, направляющий катетер может быть извлечен из доставочного катетера с последующей загрузкой фиксатора, и затем операция по повторной фиксации может быть выполнена вдоль ограничивающей положение проволоки, что в значительной степени позволяет избежать хирургического риска.
3. Ограничивающая положение проволока выполняет функцию сгибающей проволоки для изменения изначального прямого состояния части в виде дальнего конца направляющего катетера на состояние с фиксированным углом, изменяя направление фиксатора, что способствует достижению желаемого фиксирующего положения и упрощает структуру устройства доставки.
4. Ограничивающая положение проволока выполняет функцию позиционирующей проволоки, которая соединена с конкретным положением имплантируемого для точного управления положением выпускного отверстия фиксатора направляющего катетера по отношению к подлежащему фиксации элементу для достижения точной фиксации.
5. Ограничивающая положение проволока выполняет функцию вытяжной проволоки для смещения силы взаимодействия между фиксатором и подлежащим фиксации элементом во время операции фиксации и обеспечения того, что направляющий катетер находится в плотном контакте с подлежащим фиксации элементом до фиксации фиксатора, обеспечивая безопасное и эффективное прикрепление фиксатором подлежащего фиксации элемента к целевой ткани.
5. Ограничивающая положение проволока выполняет функцию отсоединяющейся проволоки, которая может быть отделена от имплантируемого аппарата после завершения операции фиксации.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Для более четкого описания технических решений в вариантах осуществления настоящей заявки или в традиционной технологии далее кратко описываются сопроводительные графические материалы, на которые дается ссылка в описании вариантов осуществления. Сопроводительные графические материалы в следующем далее описании показывают только некоторые варианты осуществления настоящей заявки, и специалист в данной области техники может получить другие графические материалы из предоставленных сопроводительных графических материалов без творческих усилий.
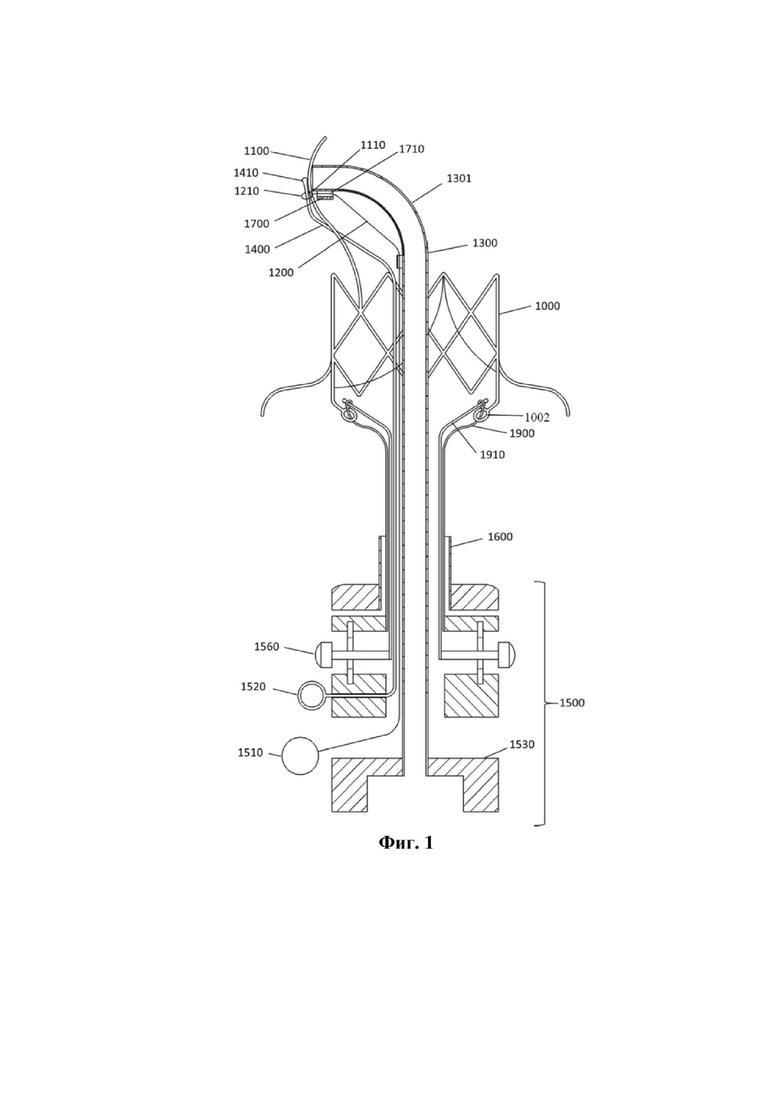
На фиг. 1 представлен схематический структурный вид системы для управляемого имплантирования искусственного атриовентрикулярного клапана в примере 1 настоящей заявки.
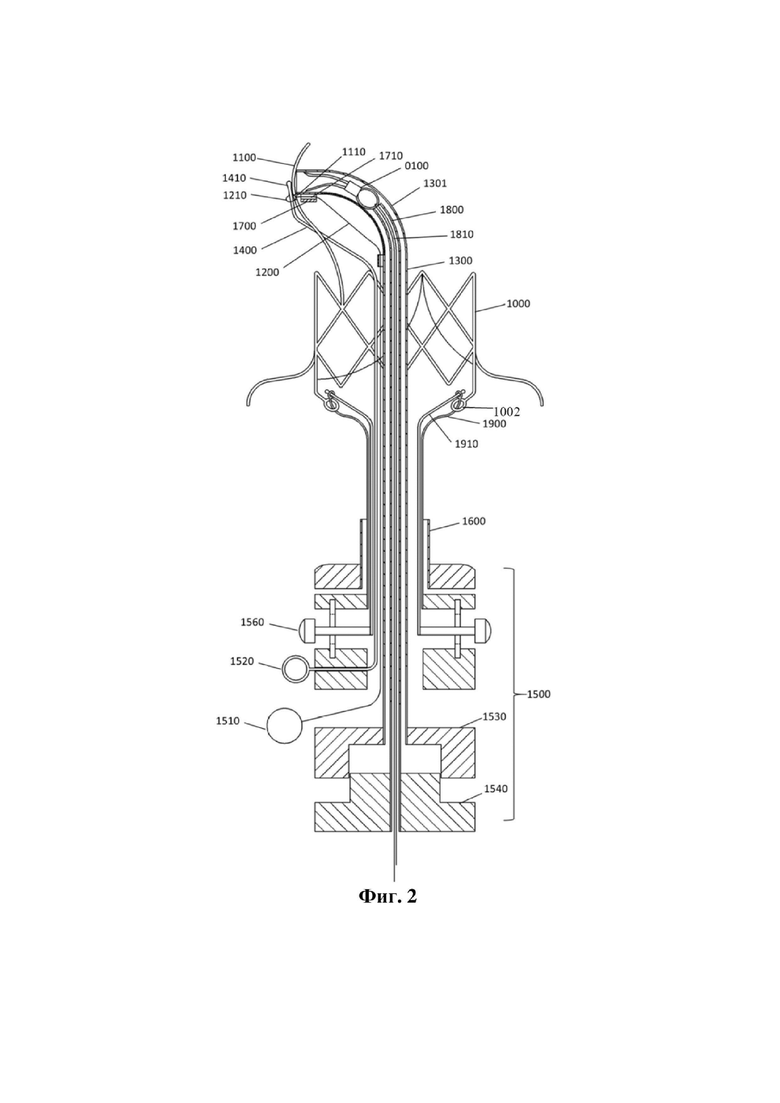
На фиг. 2 представлен схематический структурный вид системы для управляемого имплантирования искусственного атриовентрикулярного клапана, снабженного фиксатором и толкателем фиксатора, в примере 1 настоящей заявки.
На фиг. 3 представлен схематический вид варианта осуществления части в виде дальнего конца системы для управляемого имплантирования искусственного атриовентрикулярного клапана в примере 1 настоящей заявки.
На фиг. 4A-4D представлены схематические структурные виды различных вариантов осуществления элемента, подлежащего фиксации, в примере 1 настоящей заявки.
На фиг. 5 и фиг. 6 представлены схематические виды двух вариантов осуществления фиксатора системы для управляемого имплантирования искусственного атриовентрикулярного клапана согласно настоящей заявке.
На фиг. 7 представлен схематический вид варианта осуществления дальнего конца толкателя фиксатора системы для управляемого имплантирования искусственного атриовентрикулярного клапана согласно настоящей заявке.
На фиг. 8 представлен схематический вид варианта осуществления соединения между фиксатором и толкателем фиксатора.
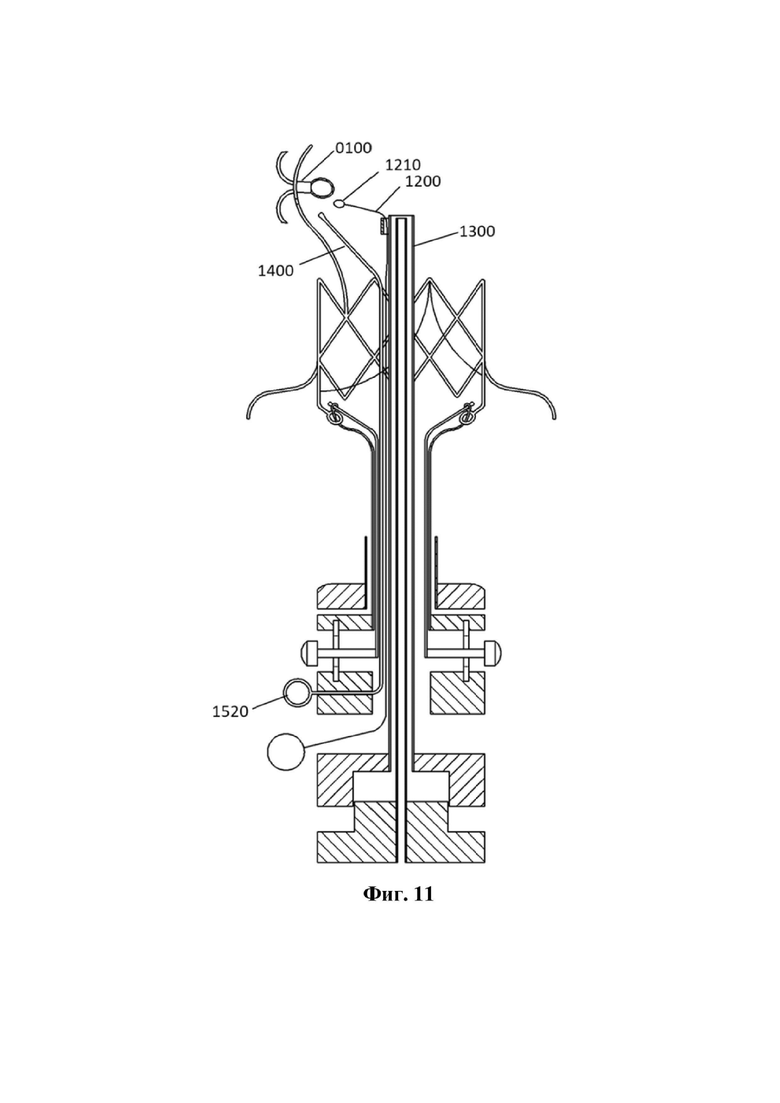
На фиг. 9-11 представлены схематические рабочие виды системы для управляемого имплантирования искусственного атриовентрикулярного клапана согласно настоящей заявке.
ПОДРОБНОЕ ОПИСАНИЕ
Технические решения в вариантах осуществления настоящей заявки будут четко и в полной мере описаны далее со ссылкой на сопроводительные графические материалы в вариантах осуществления настоящей заявки. Очевидно, что описанные варианты осуществления представляют собой только некоторые, а не все варианты осуществления настоящей заявки. Все другие варианты осуществления, полученные специалистом в данной области техники на основе вариантов осуществления настоящей заявки без каких-либо творческих усилий, должны подпадать под объем правовой охраны настоящей заявки.
Если не указано иное, все технические и научные термины, используемые в этом описании, имеют то же значение, которое обычно понимается специалистом в данной области техники, к которой относится настоящая заявка. Кроме того, термины, используемые в описании настоящей заявки, служат только для описания конкретных вариантов осуществления и не предназначены для ограничения настоящей заявки. Используемый в данном документе термин «и/или» включает любые и все комбинации одного или более из соответствующих перечисленных объектов.
Ближний конец, описанный в настоящей заявке, относится к ближнему к рукоятке управления или оператору концу, а дальний конец, описанный в настоящей заявке, относится к более отдаленному от рукоятки управления или оператору концу.
Пример 1.
Со ссылкой на фиг. 1 и фиг. 4A управляемое направляющее устройство для имплантируемого аппарата содержит имплантируемый аппарат 1000, доставочный катетер 1600, рукоятку 1500 управления, направляющий катетер 1300 и ограничивающую положение проволоку 1200. Имплантируемый аппарат 1000 содержит подлежащий фиксации элемент 1102. Ограничивающая положение проволока 1200 соединена с возможностью отсоединения с имплантируемым аппаратом 1000. Ближний конец ограничивающей положение проволоки 1200 соединен с рукояткой 1500 управления. Дальний конец направляющего катетера 1300 снабжен направляющим элементом 1700. Часть в виде дальнего конца направляющего катетера 1300 выполнена с возможностью сгибания. Ближний конец доставочного катетера 1600 и ближний конец направляющего катетера 1300 соответственно соединены с рукояткой 1500 управления. В собранном состоянии направляющий катетер 1300 и ограничивающая положение проволока 1200 размещены в доставочном катетере 1600. Ограничивающая положение проволока 1200 проходит через направляющий элемент 1700. При условии, что рукояткой 1500 управления манипулируют так, чтобы заставить направляющий элемент 1700 на направляющем катетере 1300 перемещаться вдоль ограничивающей положение проволоки 1200 в направлении дальнего конца, часть в виде дальнего конца направляющего катетера 1300 сгибается и деформируется, в результате чего дальний конец направляющего катетера 1300 примыкает к подлежащему фиксации элементу 1102 имплантируемого аппарата 1000.
В варианте осуществления при совместном перемещении ограничивающей положение проволоки 1200 и направляющего элемента 1700 часть в виде дальнего конца направляющего катетера 1300 сгибается и деформируется, и направляющий катетер 1300 в ходе деформации толкает подлежащий фиксации элемент 1102 имплантируемого аппарата 1000, вызывая радиальное перемещение подлежащего фиксации элемента 1102 в направлении целевой ткани. При условии, что ограничивающая положение проволока 1200 туго натянута, часть в виде дальнего конца направляющего катетера 1300 образует фиксированный угол, облегчая примыкание дальнего конца направляющего катетера 1300 к подлежащему фиксации элементу 1102, в результате чего подлежащий фиксации элемент 1102 прикрепляется к целевой ткани.
Со ссылкой на фиг. 2 управляемое направляющее устройство для имплантируемого аппарата дополнительно содержит фиксатор 0100 и толкатель 1800 фиксатора. В собранном состоянии фиксатор 0100 и толкатель 1800 фиксатора размещены в направляющем катетере 1300. Когда толкатель 1800 фиксатора толкает фиксатор 0100, фиксатор 0100 перемещается в направлении дальнего конца для прикрепления подлежащего фиксации элемента 1102 имплантируемого аппарата 1000 к целевой ткани. Имплантируемый аппарат 1000 дополнительно содержит несколько кольцевидных соединительных концов 1002. Соединительный элемент 1900 и управляющий элемент 1910 также расположены в доставочном катетере 1600. Соединительный элемент 1900 имеет стержнеобразную структуру, на дальнем конце которого имеется кольцо. Управляющий элемент 1910 представляет собой жесткий стержень или жесткую проволоку. В собранном состоянии соединительный элемент 1900 сначала проходит через соединительный конец 1002, а затем дальний конец управляющего элемента 1910 проходит через кольцо соединительного элемента 1900. Ближний конец управляющего элемента 1910 жестко соединен с шестым контроллером 1560 рукоятки 1500 управления.
Со ссылкой на фиг. 3 и фиг. 4A имплантируемый аппарат 1000 содержит каркас 1100, соединительное кольцо 1110 и соединительное кольцо 1111. Каркас 1100 представляет собой сжимаемую структуру, такую как V-образная или ромбовидная сжимаемая структура, и имеет соответствующую прочность и жесткость. Соединительные кольца 1110 и 1111 представляют собой кольцевидные структуры и расположены на каркасе 1100. Соединительные кольца 1110 и 1111 и каркас 1100 выполнены из никель-железных трубок, которые как одно целое вырезаны лазером и подвергнуты тепловой обработке для формирования. Подлежащий фиксации элемент 1102 расположен в пространстве, образуемом каркасом 1100. Подлежащий фиксации элемент 1102 представляет собой гибкую деталь, такую как полимерная ткань. Край одного конца подлежащего фиксации элемента 1102 прикреплен к каркасу 1100 посредством нити. В варианте осуществления подлежащий фиксации элемент 1102 представляет собой материал из политетрафторэтилена (PTFE), приваренный к каркасу 1100. В другом варианте осуществления подлежащий фиксации элемент 1102 представляет собой единое целое с имплантируемым аппаратом 1000. В другом варианте осуществления подлежащий фиксации элемент 1102 представляет собой единое целое с имплантируемым аппаратом 1000, и каркас 1100 представляет собой единое целое с имплантируемым аппаратом 1000. В варианте осуществления подлежащий фиксации элемент 1102 представляет собой гибкий элемент, один конец которого соединен с имплантируемым аппаратом 1000, и подлежащий фиксации элемент 1102 содержит опорную сетку, выполненную из плетеных металлических проволок. В другом варианте осуществления подлежащий фиксации элемент 1102 представляет собой гибкий элемент, один конец которого соединен с имплантируемым аппаратом 1000, и подлежащий фиксации элемент 1102 содержит опорную сетку, выполненную из полимерной сетки. В другом варианте осуществления подлежащий фиксации элемент 1102 представляет собой жесткий стент, выполненный из металлических проволок. В другом варианте осуществления подлежащий фиксации элемент 1102 представляет собой опорный стержень. Со ссылкой на фиг. 4A-4D в варианте осуществления подлежащий фиксации элемент 1102 может иметь треугольную, круглую, прямоугольную форму или форму равнобедренной трапеции. В настоящем варианте осуществления имплантируемый аппарат 1000 представляет собой искусственный атриовентрикулярный клапан, который должен быть прикреплен к стенке желудочка посредством фиксатора 0100.
В собранном состоянии дальний конец ограничивающей положение проволоки 1200 соединен с возможностью отсоединения с каркасом 1100 имплантируемого аппарата 1000. Ограничивающая положение проволока 1200 представляет собой гибкую проволоку, выполненную из полимерного материала, или металлическую проволоку, которая имеет соответствующую прочность и жесткость. При натяжении ограничивающая положение проволока 1200 может образовывать относительно прочное соединение, а при ослаблении она является мягкой и не влияет на положение других компонентов. Ближний конец ограничивающей положение проволоки 1200 соединен с первым контроллером 1510 рукоятки 1500 управления, как показано на фиг. 1 и фиг. 2.
В варианте осуществления со ссылкой на фиг. 3 две ограничивающие положение проволоки 1200, 1201 расположены в управляемом направляющем устройстве для имплантируемого аппарата, и два направляющих элемента 1700 симметрично расположены на дальнем конце направляющего катетера 1300. Две ограничивающие положение проволоки 1200, 1201 соответственно проходят через два направляющих элемента 1700, в результате чего дальний конец единственного направляющего катетера 1300 соединен как с ограничивающей положение проволокой 1200, так и со второй ограничивающей положение проволокой 1201. Когда две ограничивающие положение проволоки 1200, 1201 натянуты, дальний конец направляющего катетера 1300 может самостоятельно занимать положение по средней линии подлежащего фиксации элемента 1102 в результате действия двух направляющих элементов 1700, уменьшая влияние каркаса 1100, подлежащего фиксации элемента 1102 и отсоединяемых точек на выходном конце направляющего катетера 1300. В варианте осуществления один направляющий катетер 1300 может быть соединен одновременно с двумя или более ограничивающими положение проволоками 1200, 1201, и положение конца направляющего катетера 1300 может быть установлено соответствующим образом посредством управления значениями длины разных ограничивающих положение проволок 1200, 1201.
Направляющий элемент 1700 жестко соединен с направляющим катетером 1300. Направляющий элемент 1700 расположен на дальнем конце направляющего катетера 1300. Одно, два или более направляющих отверстий 1710 расположены в направляющем элементе 1700. В собранном состоянии дальний конец ограничивающей положение проволоки 1200 сначала проходит через направляющее отверстие 1710, а затем проходит через соединительное кольцо 1110. Направляющий элемент 1700 имеет соответствующую прочность и выполнен из металлического материала или твердого полимерного материала. Поверхность направляющего элемента 1700 является механически отполированной и гладкой, без острых краев для предотвращения повреждений аутологических тканей. В варианте осуществления направляющий элемент 1700 и направляющий катетер 1300 соединены вместе как одна деталь, и часть в виде дальнего конца направляющего катетера 1300 представляет собой сгибаемую структуру. Часть в виде дальнего конца направляющего катетера 1300 может быть образована из трубки из никель-титана или нержавеющей стали класса, подходящего для катетеров, с хорошей эластичностью, гравированной лазером с образованием на ней прорезей. Головка трубки с прорезями не имеет прорезей длиной от 2 мм до 10 мм, что предотвращает застревание головки фиксатора 0100 при выталкивании. Трубка с прорезями имеет соответствующую прочность и толщину стенки более 0,1 мм. Дальний конец направляющего катетера 1300 жестко соединен с направляющим элементом 1700 посредством посадки с натягом, сварки или склеивания. Ближний конец направляющего катетера 1300 соединен с третьим контроллером 1530 рукоятки 1500 управления. Посредством управления рукояткой 1500 управления третий контроллер 1530 может приводить направляющий катетер 1300 в движение для перемещения в осевом направлении.
В другом варианте осуществления управляемое направляющее устройство для имплантируемого аппарата дополнительно содержит управляющий стержень 1400. Ближний конец управляющего стержня 1400 соединен со вторым контроллером 1520 рукоятки 1500 управления. Управляющий стержень 1400 представляет собой тонкий стержень с соответствующей жесткостью, который не легко подвержен деформации в небольшом диапазоне и выполнен из металлического материала или материала из сплава с памятью формы. Дальний конец управляющего стержня 1400 представляет собой конец 1410, предотвращающий отсоединение. Конец 1410, предотвращающий отсоединение, может иметь перевернутую коническую структуру, Y-образную структуру, волнообразную структуру или сжимаемую круглую структуру, предотвращающую случайное отсоединение дальнего конца управляющего стержня 1400 от удерживающего кольца 1210. Направляющий элемент 1700 жестко соединен с дальним концом направляющего катетера 1300, и при этом направляющий элемент 1700 содержит два направляющих отверстия 1710. Дальний конец ограничивающей положение проволоки 1200 проходит через одно направляющее отверстие 1710, и дальний конец управляющего стержня 1400 проходит через другое одно направляющее отверстие 1710. Направляющие отверстия 1710 регулируют направления перемещения ограничивающей положение проволоки 1200 и управляющего стержня 1400. В варианте осуществления направляющий элемент 1700 жестко соединен с дальним концом управляющего стержня 1400, и при этом направляющий элемент 1700 содержит два направляющих отверстия 1710. В собранном состоянии дальний конец ограничивающей положение проволоки 1200 сначала проходит через одно направляющее отверстие 1710, а затем проходит через соединительное кольцо 1110. Направляющий катетер 1300 проходит через другое направляющее отверстие, и при этом направляющий элемент 1700 соединен с возможностью перемещения с направляющим катетером 1300, так что направляющий элемент 1700 может управлять направлением перемещения направляющего катетера 1300. Со ссылкой на фиг. 1 и фиг. 2 в варианте осуществления дальний конец ограничивающей положение проволоки 1200 имеет удерживающее кольцо 1210. В собранном состоянии удерживающее кольцо 1210 сначала проходит через направляющее отверстие 1710 направляющего элемента 1700, и затем проходит через соединительное кольцо 1110 имплантируемого аппарата 1000, и затем дальний конец управляющего стержня 1400 вставляют в удерживающее кольцо 1210, так что между ограничивающей положение проволокой 1200, имплантируемым аппаратом 1000 и управляющим стержнем 1400 образуется разъемное соединение. Когда рукояткой 1500 управления манипулируют так, чтобы натянуть и зафиксировать ограничивающую положение проволоку 1200, между имплантируемым аппаратом 1000, ограничивающей положение проволокой 1200, управляющим стержнем 1400 и направляющим катетером 1300 образуется соединение, в результате чего между ними фиксируется взаимное расположение. Когда вторым контроллером 1520 манипулируют так, чтобы переместить управляющий стержень 1400 в осевом направлении, в результате чего дальний конец 1410 управляющего стержня 1400 отсоединяется от удерживающего кольца 1210, имплантируемый аппарат 1000 высвобождается из ограничивающей положение проволоки 1200. Между управляющим стержнем 1400, имплантируемым аппаратом 1000, ограничивающей положение проволокой 1200 и направляющим элементом 1700 образуется разъемное соединение с возможностью перемещения. В собранном состоянии ограничивающая положение проволока 1200 выполнена с возможностью перемещения в относительно широком диапазоне, что удобно для работы и что уменьшает сложность сборки имплантируемого аппарата 1000. После сборки в доставочный катетер 1600 имплантируемый аппарат 1000 и управляемое размыкающее устройство соединены с возможностью перемещения, и при этом имеется соответствующее пространство для перемещения для различных частей, что снижает внутреннее напряжение и предотвращает повреждение продукта. В варианте осуществления направляющий элемент 1700 соединен с возможностью перемещения с управляющим стержнем 1400, и при этом управляющий стержень 1400 сначала проходит через направляющий элемент 1700, а затем проходит через удерживающее кольцо 1210 ограничивающей положение проволоки 1200. Удерживающее кольцо 1210 представляет собой гибкую и сжимаемую структуру, которая облегчает быстрое и безопасное извлечение из соединительного кольца 1110 имплантируемого аппарата 1000 и не влияет на положение имплантируемого аппарата 1000. В варианте осуществления ограничивающая положение проволока 1200 и удерживающее кольцо 1210 представляют собой единую структуру. Конец ограничивающей положение проволоки 1200 сложен пополам с образованием U-образного удерживающего кольца, или ограничивающая положение проволока 1200 сложена пополам, а ее головка обернута и оплетена с образованием удерживающего кольца. Ближний конец ограничивающей положение проволоки 1200 соединен с первым контроллером 1510 рукоятки 1500 управления. При работе с рукояткой 1500 управления первый контроллер 1510 может быть перемещен в осевом направлении и зафиксирован в положении остановки.
Со ссылкой на фиг. 5 фиксатор 0100 содержит по меньшей мере одну изогнутую иглу 0101 и фиксирующий конец 0102 изогнутой иглы. Дальний конец изогнутой иглы 0101 может радиально растягиваться с образованием изогнутой части 0104 при условии, что дальний конец изогнутой иглы 0101 не подвергается силовому воздействию. В собранном состоянии фиксатор 0100 может быть деформирован и установлен в просвет направляющего катетера 1300. При высвобождении из направляющего катетера 1300 фиксатор 0100 может восстанавливать заданную форму. Изогнутая игла 0101 представляет собой проволоку из сплава никель-титана, которой придают форму изогнутой части 0104 путем тепловой обработки. Головка изогнутой иглы 0101 представляет собой острый наконечник, образованный шлифованием. В варианте осуществления изогнутая часть 0104 имеет небольшой угол 0105, противоположный общему направлению изогнутой части 0104, на расстоянии 0,5 мм-2 мм от дальнего конца изогнутой части 0104. Небольшой угол 0105 облегчает более глубокое проникновение фиксатора 0100 в ткань, когда фиксатор 0100 выталкивается из направляющего катетера 1300. Фиксирующий конец 0102 представляет собой ближний конец изогнутой иглы 0101 для фиксации, который может быть образован посредством сварки или закручивания ближнего конца изогнутой иглы с созданием изгиба. В варианте осуществления со ссылкой на фиг. 5 с внешней стороны фиксирующего конца 0102 обеспечен связующий элемент 0112. В варианте осуществления связующий элемент 0112 представляет собой металлическую кольцевидную гильзу длиной 0,5 мм-3 мм, и при этом его внутренняя стенка находится в плотном контакте с фиксирующим концом 0102. В другом варианте осуществления со ссылкой на фиг. 6 связующий элемент 0112 представляет собой винтовое крепление, и при этом винтовое крепление образовано металлической проволокой, которой плотно обернут фиксирующий конец 0102 в осевом направлении. В варианте осуществления фиксатор 0100 также содержит соединительный конец 0103 изогнутой иглы. Соединительный конец 0103 представляет собой положение соединения фиксатора 0100, который соединен с толкателем 1800 фиксатора, и выполнен с возможностью управления активностью фиксатора 0100. В варианте осуществления соединительный конец 0103 представляет собой кольцевую структуру, образованную путем сгибания ближнего конца изогнутой иглы 0101.
Толкатель 1800 фиксатора выполнен с возможностью выталкивания фиксатора 0100 из направляющего катетера 1300, имеет соответствующую прочность и жесткость, и его часть в виде дальнего конца может деформироваться, чтобы соответствовать изгибу части в виде дальнего конца направляющего катетера 1300. Толкатель 1800 фиксатора представляет собой тонкий стержень или нитевидную структуру, выполненную из металлического материала или материала из сплава с памятью формы. В варианте осуществления со ссылкой на фиг. 7 дальний конец 1820 толкателя фиксатора 1800 имеет фиксирующий крючок 1824, выполненный с возможностью разъемного соединения с соединительным концом 0103 фиксатора 0100, тем самым ограничивая перемещение фиксатора 0100 и повышая безопасность продукта. В другом варианте осуществления со ссылкой на фиг. 8 толкатель 1800 фиксатора выполнен из металлической трубки из нержавеющей стали с прорезями, образованными на его части в виде дальнего конца, чтобы соответствовать изгибу и деформации направляющего катетера 1300. В варианте осуществления внутри металлической трубки из нержавеющей стали предусмотрена вытяжная проволока 1810. Вытяжная проволока 1810 проходит через соединительный конец 0103 фиксатора 0100, находясь в сложенном состоянии в металлической трубке из нержавеющей стали. Ближний конец выступает из основной части и им можно манипулировать вручную. В варианте осуществления дальний конец металлической трубки из нержавеющей стали содержит гибкую секцию 1806. Соединительный конец 0103 фиксатора 0100 частично расположен в области, образуемой гибкой секцией 1806, что облегчает возвращение фиксатора 0100 в направляющий катетер 1300.
Фиксатор 0100 и часть в виде дальнего конца толкателя фиксатора 1800 собраны внутри направляющего катетера 1300, соответственно. Расстояние между дальним концом фиксатора 0100 и дальним концом направляющего катетера 1300 находится в диапазоне 0,5 мм-5 мм, что предотвращает выход дальнего конца фиксатора 0100 из направляющего катетера 1300, что влияет на фиксацию в связи с высвобождением или возвращением направляющего катетера 1300. Со ссылкой на фиг. 2 ближний конец толкателя фиксатора 1800 соединен с четвертым контроллером 1540 рукоятки 1500 управления.
Со ссылкой на фиг. 9 в собранном состоянии дальний конец ограничивающей положение проволоки 1200 сначала проходит через направляющее отверстие направляющего элемента 1700. Направляющий элемент 1700 может скользить вдоль ограничивающей положение проволоки 1200. Направляющий катетер 1300 расположен ниже имплантируемого аппарата 1000, оставляя пространство для основной части имплантируемого аппарата 1000. С одной стороны, это может уменьшить повреждение имплантируемого аппарата 1000, особенно створку 1105 искусственного клапана, во время сборки и возвращения направляющего катетера 1300, и, с другой стороны, это может позволить значительно уменьшить диаметр доставочного катетера 1600, что улучшает рабочие характеристики устройства доставки. В частности, это играет прорывную роль в хирургическом доступе, например, меняя доступ через верхушку сердца или предсердие на доступ через сосуд, уменьшая нанесение травм пациенту во время пункции при оперативном лечении, снижая хирургический риск и повышая безопасность продукта.
Со ссылкой на фиг. 9, фиг. 2 и фиг. 4A, когда первый контроллер 1510 и третий контроллер 1530 перемещаются посредством манипулирования рукояткой 1500 управления, направляющий катетер 1300 направляется направляющим элементом 1700 и перемещается в осевом направлении вдоль ограничивающей положение проволоки 1200 к дальнему концу, а часть в виде дальнего конца направляющего катетера 1300 сгибается и деформируется. Направляющий катетер 1300 толкает подлежащий фиксации элемент 1102 имплантируемого аппарата 1000 для перемещения радиально до тех пор, пока ограничивающая положение проволока 1200 не натянется, при этом дальний конец направляющего катетера 1300 образует фиксированный угол 1301, и дальний конец направляющего катетера 1300 находится в контакте с подлежащим фиксации элементом 1102 имплантируемого аппарата 1000. Во время этого процесса ограничивающая положение проволока 1200 выполняет следующие функции: 1. Ограничивающая положение проволока 1200 выполняет функцию направляющей для направления и ограничения перемещения направляющего катетера 1300 вдоль конкретного направления, что имеет следующие преимущества: С одной стороны, требование к положению направляющего катетера 1300 в сборке снижено, сложность сборки уменьшена, а направляющий катетер 1300 и ограничивающая положение проволока 1200 соединены с возможностью перемещения. Между различными частями отсутствует внутреннее напряжение, что уменьшает повреждение продукта. С другой стороны, если фиксирующее положение или фиксирующий эффект не являются желательными, направляющий катетер 1300 может быть извлечен из доставочного катетера 1600 с последующей загрузкой фиксатора 0100, и затем операция по повторной фиксации может быть выполнена вдоль ограничивающей положение проволоки 1200, что в значительной степени позволяет избежать хирургического риска. 2. Ограничивающая положение проволока 1200 выполняет функцию сгибающей проволоки для изменения изначального прямого состояния части в виде дальнего конца направляющего катетера 1200 на состояние с фиксированным углом, изменяя направление фиксатора, что способствует достижению желаемого фиксирующего положения и упрощает структуру устройства доставки. 3. Ограничивающая положение проволока 1200 выполняет функцию позиционирующей проволоки, которая соединена с конкретным положением имплантируемого аппарата 1000 для точного управления положением выпускного отверстия фиксатора направляющего катетера 1300 по отношению к подлежащему фиксации элементу 1102 для достижения точной фиксации. 4. Ограничивающая положение проволока 1200 выполняет функцию вытяжной проволоки для смещения силы взаимодействия между фиксатором 0100 и подлежащим фиксации элементом 1102 во время операции фиксации и обеспечения того, что направляющий катетер 1300 находится в плотном контакте с подлежащим фиксации элементом 1102 до прикрепления фиксатора 0100, обеспечивая безопасное и эффективное прикрепление фиксатором 0100 подлежащего фиксации элемента 1102 к целевой ткани. 5. Ограничивающая положение проволока 1200 выполняет функцию отсоединяющейся проволоки, которая может быть отделена от имплантируемого аппарата 1000 после завершения операции фиксации.
Имплантируемый аппарат 1000 снабжен соединительным кольцом 1110, и при этом соединительное кольцо 1110 может быть расположено на конце имплантируемого аппарата 1000 или в других положениях имплантируемого аппарата 1000, так что может быть выбрано подходящее фиксирующее положение в соответствии с фактическими потребностями и может быть достигнут широкий диапазон применения.
При хирургической операции со ссылкой на фиг. 9 сначала имплантируемый аппарат 1000 высвобождается из доставочного катетера 1600 в предварительное положение, и рукояткой 1500 управления манипулируют для перемещения первого контроллера 1510 к ближнему концу, тем самым натягивая ограничивающую положение проволоку 1200. Со ссылкой на фиг. 10 рукояткой 1500 управления манипулируют для перемещения третьего контроллера 1530, тем самым перемещая направляющий катетер 1300 вдоль ограничивающей положение проволоки 1200 в осевом направлении к дальнему концу под управлением направляющего элемента 1700. Часть в виде дальнего конца направляющего катетера 1300 сгибается и деформируется. При тугом натягивании ограничивающей положение проволоки 1200 и ее фиксации, как показано на фиг. 2, часть в виде дальнего конца направляющего катетера 1300 образует фиксированный угол 1301, и дальний конец направляющего катетера 1300 примыкает к подлежащему фиксации элементу 1102 имплантируемого аппарата 1000. Между подлежащим фиксации элементом 1102 имплантируемого аппарата 1000, ограничивающей положение проволокой 1200, управляющим стержнем 1400 и направляющим катетером 1300 образуется фиксированное соединение. В этот момент управляющий стержень 1400 и направляющий катетер 1300 находятся соответственно в плотном контакте с подлежащим фиксации элементом 1102 имплантируемого аппарата 1000 и расположены на обоих концах соединительного кольца 1110. Расстояние между концом направляющего элемента 1700 и дальним концом удерживающего кольца 1210 приблизительно равно диаметру соединительного кольца 1110. Подлежащий фиксации элемент 1102 имплантируемого аппарата 1000 плотно прилегает к управляющему стержню 1400 и направляющему катетеру 1300 и не имеет пространства для перемещения относительно управляющего стержня 1400 и направляющего катетера 1300. Четвертым контроллером 1540 рукоятки 1500 управления манипулируют, чтобы заставить толкатель 1800 фиксатора толкать фиксатор 0100 для перемещения вдоль направляющего катетера 1300 к дальнему концу, и фиксатор 0100 постепенно высвобождается из направляющего катетера 1300 для развертывания. Наконечник фиксатора 0100 сначала проходит через подлежащий фиксации элемент 1102, а затем протыкает целевую ткань, в результате чего фиксатор 0100 прикрепляет подлежащий фиксации элемент 1102 имплантируемого аппарата 1000 к целевой ткани. Посредством устройства медицинской визуализации можно проверить был прикреплен фиксатор 0100 к целевой ткани или нет. Если не был, то вытяжную проволоку 1810 тянут, чтобы извлечь фиксатор 0100 в направляющий катетер 1300, повторно настроить положение имплантируемого аппарата 1000 и затем снова выполнить операцию фиксации. После завершения операции фиксации вытяжную проволоку 1810 вытягивают из толкателя 1800 фиксатора. Со ссылкой на фиг. 11, после завершения операции фиксации рукояткой 1500 управления манипулируют для перемещения второго контроллера 1520 в осевом направлении для извлечения дальнего конца управляющего стержня 1400 из удерживающего кольца 1210. Соединение между подлежащим фиксации элементом 1102, ограничивающей положение проволокой 1200, управляющим стержнем 1400 и направляющим катетером 1300 высвобождается, а также завершается высвобождение подлежащего фиксации 1102 элемента имплантируемого аппарата 1000. Наконец, шестым контроллером 1560 рукоятки 1500 управления манипулируют для перемещения управляющего элемента 1910 к ближнему концу, пока дальний конец управляющего элемента 1910 не будет извлечен из кольца на дальнем конце соединительного элемента 1900, тем самым полностью высвобождая имплантируемый аппарат 1000 из доставочного катетера 1600. Доставочный катетер 1600 затем извлекают из сердца, а имплантируемый аппарат 1000 прикреплен к целевой ткани посредством фиксатора 0100.
Устройство согласно настоящей заявке легко разбирается, подлежащий фиксации элемент 1102 имплантируемого аппарата 1000 может быть быстро отделен от системы доставки, а управляемое направляющее устройство больше не влияет на имплантируемый аппарат 1000 после разборки, тем самым снижая хирургический риск.
Технические признаки вышеописанных вариантов осуществления могут быть объединены в произвольном порядке. Для обеспечения простоты описания в вышеупомянутых вариантах осуществления описаны не все возможные комбинации технических признаков. Однако, при условии отсутствия противоречия в сочетании этих технических признаков, сочетания должны находиться в пределах объема настоящей заявки.
Описанное выше является лишь некоторыми вариантами осуществления настоящей заявки, и при этом эти варианты осуществления являются конкретными и подробными, однако они не предназначены для ограничения объема настоящей заявки. Специалисту в данной области техники должно быть понятно, что различные модификации и улучшения могут быть сделаны, не отходя от идеи настоящей заявки, и при этом они все подпадают под объем правовой охраны настоящей заявки. Таким образом, объем патентной охраны настоящей заявки определяется прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ СЕРДЕЧНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ДОСТАВКИ | 2018 |
|
RU2759657C2 |
| УЗЕЛ ДОСТАВКИ И УСТАНОВКИ ИСКУССТВЕННОГО КЛАПАНА СЕРДЦА | 2019 |
|
RU2798071C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОЙ ПОДДЕРЖКИ ПЕРЕМЕЩЕНИЯ МИТРАЛЬНОГО КЛАПАНА | 2011 |
|
RU2682314C2 |
| ПРОТЕЗ КЛАПАНА, УСТАНАВЛИВАЕМЫЙ ПОСРЕДСТВОМ КАТЕТЕРА, И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2014 |
|
RU2666591C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЯЕМОЙ ПОДДЕРЖКИ ПЕРЕМЕЩЕНИЯ МИТРАЛЬНОГО КЛАПАНА | 2011 |
|
RU2550723C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЯЕМОЙ ПОДДЕРЖКИ ПЕРЕМЕЩЕНИЯ МИТРАЛЬНОГО КЛАПАНА | 2014 |
|
RU2692227C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЯЕМОЙ ПОДДЕРЖКИ ПЕРЕМЕЩЕНИЯ МИТРАЛЬНОГО КЛАПАНА | 2011 |
|
RU2537064C2 |
| ВНУТРИСОСУДИСТЫЕ ОККЛЮЗИОННЫЕ УСТРОЙСТВА ДЛЯ НАПРАВЛЕНИЯ ПО ЧРЕСКОЖНОМУ КАТЕТЕРУ | 2007 |
|
RU2432128C1 |
| МНОГОСЛОЙНЫЕ ПЛЕТЕНЫЕ КОНСТРУКЦИИ ДЛЯ ОККЛЮЗИИ СОСУДИСТЫХ ДЕФЕКТОВ | 2007 |
|
RU2446773C2 |
| ЗАЖИМ МИТРАЛЬНОГО КЛАПАНА С БЛОКИРУЮЩИМ МЕХАНИЗМОМ | 2021 |
|
RU2814942C1 |



Изобретение относится к медицинскому аппарату, в частности к системе для управляемого имплантирования искусственного атриовентрикулярного клапана. Система для управляемого имплантирования искусственного атриовентрикулярного клапана содержит имплантируемый искусственный атриовентрикулярный клапан, доставочный катетер, рукоятку управления, направляющий катетер и ограничивающую положение проволоку. Имплантируемый искусственный атриовентрикулярный клапан содержит подлежащий фиксации элемент. Ограничивающая положение проволока соединена с возможностью отсоединения с имплантируемым искусственным атриовентрикулярным клапаном. Ближний конец ограничивающей положение проволоки соединен с рукояткой управления. Дальний конец направляющего катетера снабжен направляющим элементом. Часть в виде дальнего конца направляющего катетера выполнена с возможностью сгибания. Ближний конец доставочного катетера и ближний конец направляющего катетера соответственно соединены с рукояткой управления. В собранном состоянии направляющий катетер и ограничивающая положение проволока размещены в доставочном катетере, при этом ограничивающая положение проволока проходит через направляющий элемент. Рукоятка управления выполнена с возможностью перемещения направляющего элемента на направляющем катетере вдоль ограничивающей положение проволоки в направлении дальнего конца, при этом часть в виде дальнего конца направляющего катетера выполнена с возможностью сгибания и деформирования, а дальний конец направляющего катетера выполнен с возможностью примыкания к подлежащему фиксации элементу имплантируемого искусственного атриовентрикулярного клапана. Система для управляемого имплантирования искусственного атриовентрикулярного клапана обладает простой структурой, небольшим диаметром катетера, точным позиционированием и безопасной и надежной фиксацией. 9 з.п. ф-лы, 11 ил.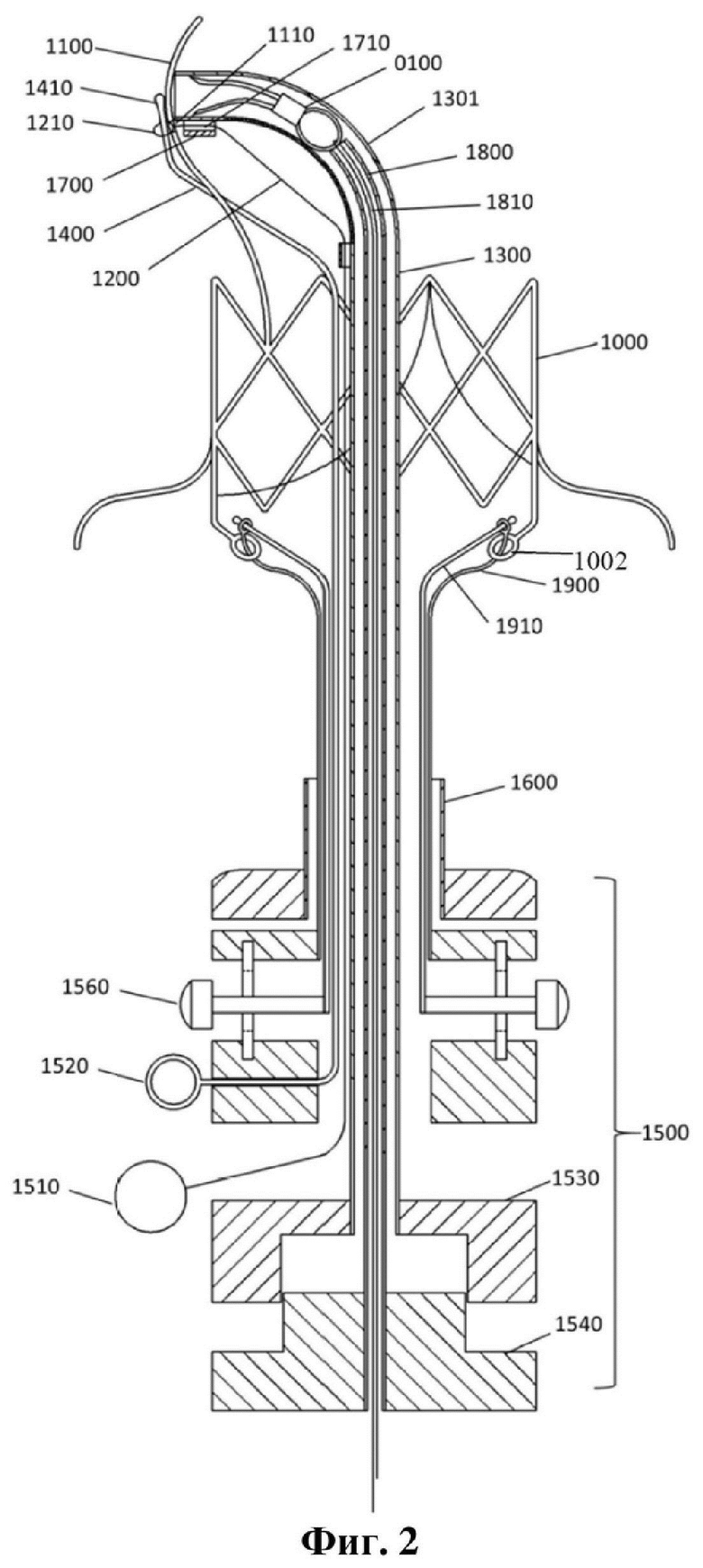
1. Система для управляемого имплантирования искусственного атриовентрикулярного клапана, содержащая имплантируемый искусственный атриовентрикулярный клапан, доставочный катетер и рукоятку управления, отличающаяся тем, что дополнительно содержит направляющий катетер и ограничивающую положение проволоку,
при этом имплантируемый искусственный атриовентрикулярный клапан содержит подлежащий фиксации элемент, ограничивающая положение проволока соединена с возможностью отсоединения с имплантируемым искусственным атриовентрикулярным клапаном, ближний конец ограничивающей положение проволоки соединен с рукояткой управления, дальний конец направляющего катетера снабжен направляющим элементом, часть в виде дальнего конца направляющего катетера выполнена с возможностью сгибания, ближний конец доставочного катетера и ближний конец направляющего катетера соответственно соединены с рукояткой управления;
в собранном состоянии направляющий катетер и ограничивающая положение проволока размещены в доставочном катетере, при этом ограничивающая положение проволока проходит через направляющий элемент;
рукоятка управления выполнена с возможностью перемещения направляющего элемента на направляющем катетере вдоль ограничивающей положение проволоки в направлении дальнего конца, при этом часть в виде дальнего конца направляющего катетера выполнена с возможностью сгибания и деформирования, а дальний конец направляющего катетера выполнен с возможностью примыкания к подлежащему фиксации элементу имплантируемого искусственного атриовентрикулярного клапана.
2. Система по п. 1, отличающаяся тем, что дополнительно содержит фиксатор и толкатель фиксатора, при этом в собранном состоянии фиксатор и толкатель фиксатора размещены в направляющем катетере; толкатель фиксатора выполнен с возможностью толкания фиксатора, при этом фиксатор выполнен с возможностью перемещения в направлении дальнего конца и прикрепления подлежащего фиксации элемента имплантируемого искусственного атриовентрикулярного клапана к целевой ткани.
3. Система по п. 1, отличающаяся тем, что дополнительно содержит управляющий стержень, при этом дальний конец ограничивающей положение проволоки имеет удерживающее кольцо, имплантируемый искусственный атриовентрикулярный клапан содержит соединительное кольцо, ближний конец управляющего стержня соединен с рукояткой управления;
в собранном состоянии дальний конец управляющего стержня выполнен с возможностью вставки в удерживающее кольцо, которое проходит через соединительное кольцо имплантируемого искусственного атриовентрикулярного клапана;
рукоятка управления выполнена с возможностью натяжения и фиксации ограничивающей положение проволоки с образованием соединения между имплантируемым искусственным атриовентрикулярным клапаном, ограничивающей положение проволокой, управляющим стержнем и направляющим катетером;
рукоятка управления выполнена с возможностью перемещения управляющего стержня в осевом направлении, при этом дальний конец управляющего стержня выполнен с возможностью отсоединения от удерживающего кольца, а имплантируемый искусственный атриовентрикулярный клапан выполнен с возможностью высвобождения из ограничивающей положение проволоки.
4. Система по п. 3, отличающаяся тем, что дальний конец управляющего стержня представляет собой конец, предотвращающий отсоединение, при этом конец, предотвращающий отсоединение, представляет собой перевернутую коническую структуру, Y-образную структуру, волнообразную структуру или сжимаемую круглую структуру.
5. Система по п. 3, отличающаяся тем, что направляющий элемент жестко соединен с направляющим катетером, при этом направляющий элемент расположен на дальнем конце направляющего катетера, направляющий элемент содержит направляющее отверстие;
в собранном состоянии дальний конец ограничивающей положение проволоки сначала проходит через направляющее отверстие, а затем проходит через соединительное кольцо.
6. Система по п. 5, отличающаяся тем, что направляющий элемент и направляющий катетер соединены вместе как одна деталь.
7. Система по п. 5, отличающаяся тем, что управляющий стержень проходит через направляющее отверстие в направляющем элементе.
8. Система по п. 1, отличающаяся тем, что подлежащий фиксации элемент представляет собой единое целое с имплантируемым искусственным атриовентрикулярным клапаном.
9. Система по п. 1, отличающаяся тем, что подлежащий фиксации элемент представляет собой гибкую деталь, при этом один конец подлежащего фиксации элемента соединен с имплантируемым искусственным атриовентрикулярным клапаном.
10. Система по п. 1, отличающаяся тем, что подлежащий фиксации элемент содержит опорную сетку.
| CN 104055600 A, 24.09.2014 | |||
| МЕТОД И УСТРОЙСТВО ДЛЯ ИМПЛАНТАЦИИ БАЛЛОНОРАСШИРЯЕМОГО ПРОТЕЗА КЛАПАНА СЕРДЦА | 2016 |
|
RU2625285C1 |
| СИСТЕМА И СПОСОБ ДЛЯ СБОРКИ ВВОДИМОГО ЧЕРЕЗ КОЖУ СЛОЖЕННОГО КЛАПАНА | 2013 |
|
RU2609461C2 |
| CN 104055604 A, 24.09.2014 | |||
| CN 104055602 A, 24.09.2014 | |||
| CN 104055601 B, 24.08.2016. | |||
