Область техники
Настоящее изобретение относится к лидарной (LIDAR) системе, адаптированной для проведения анемометрических измерений, а также к способу измерения, в котором используют такую систему.
Уровень техники
Лидарные (LIDAR) системы, что является сокращением от “Light Detection and Ranging” (на английском языке – лазерная система обнаружения и измерения дальности), широко известны и используются во многих областях, в частности, для проведения анемометрических измерений. При анемометрическом измерении скорости лазерный пучок обратно рассеивается частицами, которые находятся в воздухе в виде взвеси, такими как аэрозоли или твердые частички, и которые увлекаются воздушными потоками. При этом составляющую скорости ветра, которая параллельна лазерному пучку, выводят из смещения частоты, связанного с доплеровским эффектом. Однако ряд обстоятельств ограничивает эффективность существующих лидарных систем, используемых для анемометрических измерений скорости. Среди этих обстоятельств одним из наиболее неблагоприятных является низкое значение спектрального отношения CNR (от “carrier-to-noise spectral ratio” - отношение сигнала несущей к сигналу шумовой помехи), обозначаемого CNR_sp, которое является отношением максимума амплитуды спектра сигнала обратного рассеяния к спектральному шуму, где спектральный шум оценивают как среднеквадратическое отклонение спектральной амплитуды за пределами сигнала обратного рассеяния. Это отношение CNP_sp предпочтительно превышает 3 для обеспечения надежного определения доплеровского смещения и, следовательно, анемометрической скорости. Это ограничение на значение отношения CNP_sp является исключительно строгим для измерений, которые осуществляются на высоте в атмосфере, в частности, для измерений, производимых с борта самолета, и, в частности, на высоте более 2 или 3 км (километров), по причине низких значений концентрации обратно рассеивающих частиц на таких уровнях высоты.
Первый тип лидарных систем, используемый для анемометрических измерений, основан на непрерывных лазерных источниках, таких как лазерные диоды. В этом случае участок атмосферы, которого касается измерение, выбирают, придавая излучаемому лазерному пучку форму сходящегося пучка. Таким образом, лазерный пучок сходится в зоне фокусировки, затем расходится, и его можно описать при помощи гауссовой структуры пучка. Зона фокусировки имеет длину, измеренную параллельно центральному направлению распространения лазерного пучка, равную двойной длине Рэлея, то есть равную 2⋅λ/(π⋅θ2), и минимальный радиус, называемый “waist (шейкой)” на английском языке, равный λ/(π⋅θ), где λ является длиной волны лазерного пучка, а θ является половиной выраженного в радианах угла расхождения лазерного пучка за пределами зоны фокусировки со стороны, противоположной источнику лазерного излучения. Как правило, половина угла расхождения θ является половиной углового раскрытия лазерного пучка, которое существует в 2 км от зоны фокусировки. В этих условиях часть лазерного пучка, которая рассеивается в обратном направлении, поступает в основном из зоны фокусировки, поэтому результат измерения лидара относится к скорости ветра, существующей в зоне фокусировки. Но принцип выбора зоны фокусировки по расхождению лазерного пучка устанавливает взаимосвязь между размером этой зоны фокусировки и расстоянием удаления между этой зоной фокусировки и лидаром. На практике, когда выходное отверстие лидара имеет радиус 0,10 м (метра), зона фокусировки может быть удалена по отношению к лидару на несколько сот метров, например, 300 м, при этом длина зоны фокусировки равна около 50 м.
Кроме того, как известно, обработка сигнала обнаружения для такого лидара с непрерывным излучением включает в себя разделение сигнала обнаружения по последовательным и раздельным временным окнам, например, с продолжительностью каждого временного окна, которая может быть равна 1 мкс (микросекунда). Чтобы улучшить значение отношения CNP_sp, которое получают для каждого окна временного разделения, значения спектральной амплитуды, получаемые раздельно из N последовательных временных окон, где N является положительным целым числом, объединяют в среднее значение, которое образует результат измерения. Но, учитывая, что измеренные значения, которые складываются для получения результата измерения, происходят от не связанных между собой измеряемых сигналов, отношение CNP_sp, относящееся к результату измерения, увеличивают на множитель N1/2 по сравнению с отношением CNP_sp, которое относится к каждому измеренному значению. Например, при объединенных таким образом 100 измеренных значений, выигрыш в отношении CNP_sp увеличивается в 10 раз. Однако такой выигрыш может быть недостаточным для условий анемометрического измерения, когда измеренное значение для отношения CNP_sp является исключительно низким, например, на высоте более 2 или 3 км, где коэффициент обратного рассеяния лазерного пучка взвешенными в воздухе частицами может быть очень низким. В альтернативном варианте использование очень большого числа N задает очень большую продолжительность фактического измерения, что может быть несовместимым с некоторыми вариантами применения, такими как анемометрические измерения, которые необходимо производить в реальном времени, например, с борта самолета.
В лидарных системах второго типа источник лазерного излучения может быть импульсным, и излучение в виде импульсов в атмосферу имеет структуру коллимированного пучка. Продолжительность каждого импульса лазерного излучения может, например, составлять от 0,15 мкс до 1 мкс. При этом участок атмосферы, затрагиваемый каждым измерением, является цилиндром, диаметр которого является диаметром коллимированного лазерного пучка и длина которого в направлении распространения лазерных импульсов соответствует продолжительности временного окна измерения, связанного с каждым импульсом обратно рассеиваемого излучения, умноженной на С/2, где С является скоростью распространения излучения в атмосфере. Одновременно расстояние между участком атмосферы, затрагиваемым измерением, и лидаром определяют по контролируемой задержке между излучением импульса и соответствующим временным окном измерения. Если продолжительность каждого лазерного импульса является короткой, например, порядка 0,15 мкс, пространственное разрешение является высоким, но значение отношения CNP_sp является низким и с учетом спектрального уширения порождает погрешность в результате измерения составляющей анемометрической скорости, которая параллельна направлению распространения лазерных импульсов. С другой стороны, если каждый импульс лазерного излучения является слишком длинным, например, порядка 1 мкс, отношение CNP_sp увеличивается, спектральное уширение уменьшается, но пространственное разрешение ухудшается. Следовательно, отсюда вытекает обязывающий компромисс между пространственным разрешением, значением отношения CNP_sp и точностью измеряемого значения анемометрической скорости.
В случае лидарных систем второго типа отношение CNP_sp можно также увеличить путем усреднения N раздельных элементарных измерений, при этом каждое элементарное измерение, являющееся результатом отдельного лазерного импульса и обнаружения обратно рассеянного излучения, соответствующего этому лазерному импульсу. Но, поскольку комбинируемые таким образом элементарные измерения получены на основании независимых между собой сигналов, отношение CNP_sp для результата усреднения и на этот раз увеличивается только на множитель N1/2.
В зависимости от типа используемой лидарной системы могут также существовать другие ограничения эффективности лидара при анемометрических измерениях: продолжительность измерения, вес и габарит системы, чувствительность при низких значениях анемометрической скорости и т.д.
Техническая задача
Исходя из этой ситуации, задачей настоящего изобретения является обеспечение возможности осуществления анемометрических измерений, которые дают значения отношения CNP_sp, превышающие такие значения для известных систем, при одновременном сохранении хорошего пространственного разрешения
Дополнительной задачей изобретения является обеспечение таких измерений, которые обладают также высокой точностью значений анемометрической скорости, являющихся результатами измерений.
Еще одной задачей изобретения является обеспечение измерений при продолжительности измерения, которая не является слишком длинной.
Наконец, другими дополнительными задачами изобретения являются задачи создания лидарной системы, которая является легкой по весу, небольшого объема, предпочтительно недорогой и которая обладает хорошей чувствительностью при низких значениях анемометрической скорости.
Раскрытие изобретения
Для решения по меньшей мере одной или другой из этих задач в качестве первого объекта изобретения предложена новая лидарная система, которая адаптирована для осуществления анемометрических измерений и которая содержит:
- источник лазерного излучения, выполненный с возможностью излучать лазерный пучок в сторону участка атмосферы, внешнего по отношению к лидару, таким образом, чтобы лазерный пучок был сходящимся за выходным отверстием источника лазерного излучения и имел минимальное поперечное сечение пучка на половине длины зоны фокусировки лазерного пучка, причем эта зона фокусировки имеет длину, равную 2⋅λ/(π⋅θ2), измеренную параллельно центральному направлению распространения лазерного пучка, где λ - длина волны лазерного пучка, а θ - половина выраженного в радианах угла расхождения лазерного пучка за пределами зоны фокусировки со стороны, противоположной источнику лазерного излучения, при этом λ/(π⋅θ2) называется длиной Рэлея;
- гетеродинный детекторный блок, выполненный с возможностью принимать часть лазерного пучка, обратно рассеянного частицами, находящимися в зоне фокусировки; и
- доплеровский вычислительный модуль, выполненный с возможностью определять значение скорости частиц на основании сигнала биения, формируемого гетеродинным детекторным блоком.
Иначе говоря, заявленная лидарная система аналогична описанной выше системе на основе источника непрерывного лазерного излучения. В частности, участок атмосферы, который является объектом анемометрического измерения, является зоной фокусировки, определяемой сходящейся структурой лазерного пучка на уровне выходного отверстия источника лазерного излучения.
Половина угла θ расхождения лазерного пучка является углом, под которым видна точка, где интенсивность пучка равна 1/е2-кратному максимальному значению интенсивности пучка, в плоскости определения параметров, перпендикулярной к центральному направлению распространения лазерного пучка, которая находится в 2 км за плоскостью сужения, где лазерный пучок имеет минимальный размер поперечного сечения по отношению к направлению распространения лазерного пучка. Кроме того, половину угла θ измеряют по отношению к центральному направлению распространения, и его вершиной является точка пересечения между этим центральным направлением распространения и указанной плоскостью сужения.
Частицы, которые обратно рассеивают часть лазерного пучка, могут быть любыми, в частности, твердыми частицами или частицами аэрозоля, взвешенными в воздухе, такими как пыль, микрочастицы, микрокристаллы льда, мелкие капли воды и т.д.
Согласно изобретению, лидарная система дополнительно содержит:
- устройство временного контроля лазерного пучка, выполненное с возможностью формирования лазерного пучка в виде последовательных лазерных импульсов и объединенное с источником лазерного излучения, чтобы лазерные импульсы проходили через зону фокусировки, при этом часть каждого лазерного импульса обратно рассеивается частицами. Кроме того, это устройство временного контроля выполнено таким образом, что каждый лазерный импульс имеет индивидуальную продолжительность, превышающую или равную двойной длине Рэлея, поделенной на скорость распространения лазерных импульсов в атмосфере, и меньшую 20 мкс, предпочтительно меньшую 10 мкс.
Индивидуальная продолжительность каждого лазерного импульса является временем между первым моментом, когда мощность лазерного пучка возрастает до половины максимального значения мощности, достигаемой во время лазерного импульса, и вторым моментом, когда мощность лазерного пучка уменьшается опять до половины максимального значения мощности. Иначе говоря, индивидуальная продолжительность лазерного импульса определяется как ширину на половине высоты импульса в терминах продолжительности и мгновенной мощности излучения.
Благодаря использованию устройства временного контроля лазерного пучка, продолжительность каждого импульса лазерного пучка регулируют, чтобы гетеродинный детекторный блок принимал обратно рассеянное излучение из всей зоны фокусировки, так же как лидарная система непрерывного излучения. Это позволяет максимизировать интенсивность сигнала детектирования, на который влияет доплеровский эффект.
Кроме того, устройство временного контроля лазерного пучка, определяющее последовательные лазерные импульсы, позволяет устранить влияния на обратное рассеяние, которые могли бы появляться при временных смещениях, превышающих время атмосферной когерентности. Такое время атмосферной когерентности связано, в частности, с локальными перемещениями атмосферы.
Кроме того, благодаря максимальному значению в 20 мкс, устройство временного контроля лазерного пучка, определяющее последовательные лазерные импульсы, позволяет устранить влияния на обратное рассеяние, которые могли бы происходить от облаков, находящихся на заднем плане зоны фокусировки, в которых обратно рассеивающие частицы могут иметь намного большую концентрацию по сравнению с зоной фокусировки. Таким образом, использование импульсного лазерного пучка позволяет обеспечить условия, чтобы сигнал детектирования исходит именно из зоны фокусировки.
Наконец, применение лазерных импульсов позволяет добиваться значений мощности излучения в каждом импульсе, превышающих значения мощности, получаемые при непрерывном лазерном излучении. В этом случае отношение CNP_sp, которое пропорционально интенсивности обратно рассеянного излучения, принимаемого гетеродинным детекторным блоком, может иметь большее значение. По этой причине заявленную лидарную систему можно применять в условиях, когда коэффициент обратного рассеяния атмосферы является низким или очень низким, в частности, с борта летательного аппарата на высоте 2 км и более.
По этой же причине заявленная лидарная система делает необязательным усреднение нескольких результатов измерения, полученных от отдельных лазерных импульсов, или позволяет осуществить такую операцию усреднения на небольшом количестве импульсов, поэтому время, необходимое для получения конечного результата измерения, может быть исключительно коротким.
Кроме того, заявленная лидарная система не вынуждает к компромиссу между пространственным разрешением и точностью измеряемых значений анемометрической скорости в отличие от импульсных лидарных систем, в которых пространственная селективность зависит от продолжительности импульсов.
Предпочтительно устройство временного контроля лазерного пучка может быть выполнено таким образом, чтобы каждый лазерный импульс имел индивидуальную продолжительность, равную тройной длине Рэлея, поделенной на скорость распространения лазерных импульсов в атмосфере.
В частности, устройство временного контроля лазерного пучка может быть выполнено таким образом, чтобы индивидуальная продолжительность каждого лазерного импульса составляла от 0,2 мкс до 5 мкс, предпочтительно от 0,5 мкс до 1,2 мкс. Действительно, такая продолжительность лазерного импульса подходит, когда время атмосферной когерентности по существу равно 1 мкс.
В частных вариантах выполнения изобретения можно применять по меньшей мере один из следующих дополнительных признаков отдельно или в комбинации с другими признаками:
- устройство временного контроля лазерного пучка может содержать по меньшей мере один компонент, выбранный среди оптико-акустического модулятора, электрооптического модулятора, полупроводникового оптического усилителя, системы включения и выключения источника лазерного излучения и системы выбора собственной моды резонатора усиления лазерного излучения. Вместе с тем, в альтернативном варианте можно использовать любое другое устройство временного контроля лазерного пучка, например, такое как система с оптическим, электронным или электрооптическим переключателем;
- устройство временного контроля лазерного пучка может быть встроено в источник лазерного излучения или может быть выполнено с возможностью воздействовать на управляющий вход источника лазерного излучения, или может быть расположено на выходе источника лазерного излучения относительно направления распространения излучения, чтобы изменять по меньшей мере одну характеристику временного распределения лазерного пучка после того, как этот лазерный пучок генерирован источником лазерного излучения;
- источник лазерного излучения может быть источником непрерывного излучения, и в этом случае устройство временного контроля лазерного пучка может быть выполнено с возможностью разделения этого лазерного пучка на последовательные лазерные импульсы. В альтернативном варианте источник лазерного излучения может быть источником с излучением в виде последовательных лазерных импульсов, и устройство временного контроля лазерного пучка может быть выполнено с возможностью изменения, в частности, увеличения продолжительности каждого лазерного импульса. Альтернативно можно применять другие комбинации типа источника лазерного излучения и типа устройства временного контроля лазерного пучка;
- система может быть также выполнена с возможностью применения частотного смещения между каждым лазерным импульсом и контрольным лазерным сигналом, который использует гетеродинный детекторный блок, таким образом, чтобы нулевая скорость частиц, находящихся в зоне фокусировки, относительно лидарной системы соответствовала частоте, которая не является нулевой, для сигнала биения, формируемого гетеродинным детекторным блоком. Такое усовершенствование представляет интерес для измерения низких анемометрических скоростей, например, в таких приложениях, как оптимизация работы ветряных турбин, или для измерений, производимых с борта летательных аппаратов, которые могут оставаться в режиме зависания или почти в режиме зависания;
- источник лазерного излучения может быть источником волоконно-оптического типа и может быть выполнен таким образом, чтобы каждый лазерный импульс имел мощность, составляющую от 100 Вт до 5⋅105 Вт, предпочтительно от 200 Вт до 2000 Вт. Такие источники лазерного излучения с оптическим волокном могут быть не тяжелыми и не габаритными, поэтому лидарную систему можно легко установить на борту летательного аппарата;
- длина волны источника лазерного излучения может составлять от 1,5 мкм до 1,7мкм - в спектральной области прозрачности атмосферы и, возможно, также в спектральной области прозрачности оптических волокон, используемых в лидарной системе. Преимуществом такой длины волны является ограничение рисков для глаз;
- устройство временного контроля лазерного пучка может быть выполнено таким образом, чтобы два последовательных лазерных импульса были разделены временем, составляющим от 3 мкс до 500 мкс, предпочтительно меньшим 100 мкс. Это позволяет получать более значительные значения мощности лазерного импульса;
- лидарная система может быть выполнена с возможностью излучать лазерные импульсы одновременно в нескольких направлениях измерения, которые распределены вокруг центрального направления с углом каждого направления измерения менее 30° относительно центрального направления, чтобы получать соответствующие значения для трех координат скорости частиц. Это позволяет характеризовать составляющие скорости ветра одновременно по трем ортогональным осям пространственных координат, то есть в трех измерениях; и
- источник лазерного излучения может содержать переменное устройство фокусировки, выполненное с возможностью изменять расстояние измерения между выходным отверстием этого источника лазерного излучения и центральной точкой зоны фокусировки, например, от 200 м до 1000 м.
Вторым объектом изобретения является летательный аппарат, оснащенный лидарной системой, являющейся первым объектом изобретения, причем эта лидарная система установлена на борту летательного аппарата для осуществления анемометрических измерений во время полета этого летательного аппарата. Летательный аппарат может быть, в частности, самолетом, вертолетом, беспилотным летательным аппаратом любого типа, в частности, с неподвижной несущей плоскостью или типа мультикоптера.
Наконец, третьим объектом изобретения является способ анемометрического измерения, который содержит этапы, на которых:
- лидарную систему, являющуюся первым объектом изобретения, размещают таким образом, чтобы зона фокусировки находилась в участке атмосферы, где необходимо измерить анемометрическую скорость;
- выбирают индивидуальную продолжительность лазерного импульса, превышающую или равную двойной длине Рэлея, поделенной на скорость распространения лазерных импульсов в атмосфере, и меньшую 20 мкс, предпочтительно меньшую 10 мкс; и
- активируют лидарную систему для получения значения скорости частиц, находящихся в зоне фокусировки.
Предпочтительно устройство временного контроля лазерного пучка можно регулировать таким образом, чтобы индивидуальная продолжительность каждого лазерного импульса составляла от 0,2 до 5-кратного, предпочтительно от 0,5 до 1,2-кратного времени атмосферной когерентности, которое относится к зоне фокусировки.
Краткое описание фигур
Признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания не ограничительных примеров осуществления изобретения со ссылками на прилагаемые фигуры, на которых:
фиг. 1 - структурная схема заявленной лидарной системы;
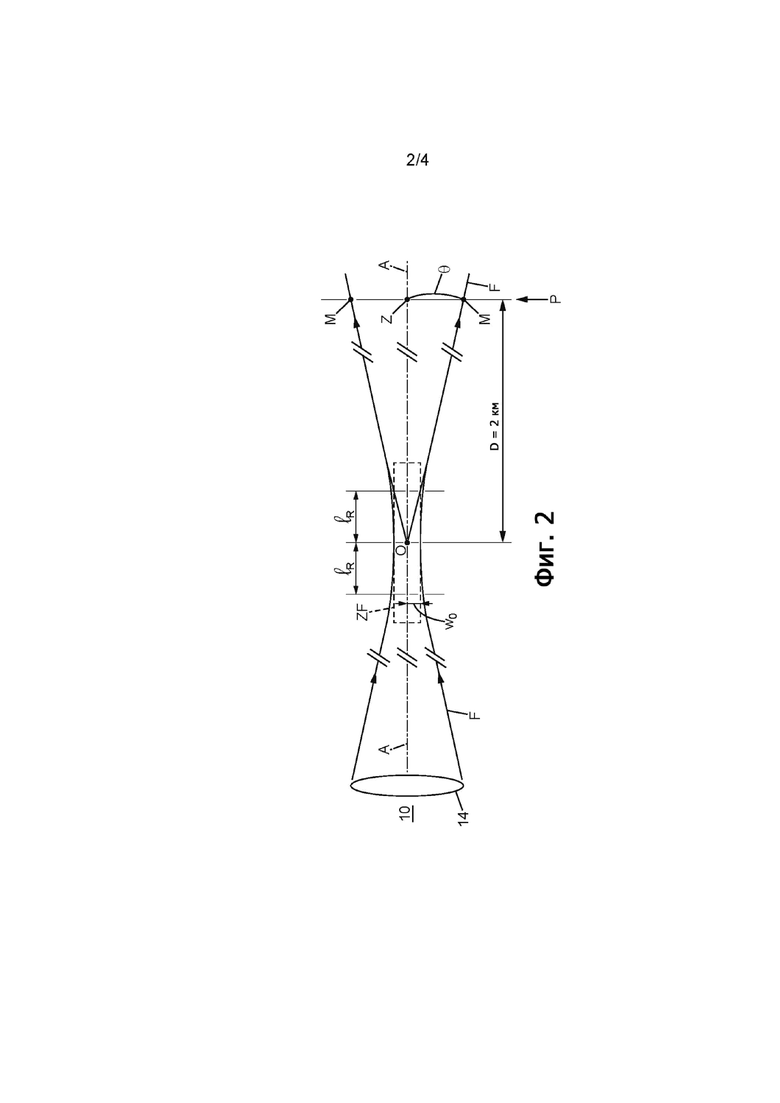
фиг. 2 - различные геометрические параметры лазерного пучка, создаваемого лидарной системой, показанной на фиг. 1;
фиг. 3 - временная диаграмма со сравнением возможного лазерного излучения лидарной системы, показанной на фиг. 1, с лазерными излучениями известных систем LIDAR;
фиг. 4 - возможный вариант применения лидарной системы, показанной на фиг. 1;
фиг. 5 иллюстрирует усовершенствование изобретения для осуществления трехмерных анемометрических измерений.
Подробное описание изобретения
Для большей ясности размеры элементов, показанных на этих фигурах, не соответствуют ни реальным размерам, ни реальным размерным соотношениям. Кроме того, некоторые из этих элементов показаны только символично, и идентичные элементы или элементы, имеющие идентичные функции, обозначены на разных фигурах одинаковыми позициями.
Показанная на фиг. 1 заявленная лидарная система может быть выполнена на основе лидарной системы непрерывного излучения. Она содержит источник 10 лазерного излучения, гетеродинный детекторный блок 20 и доплеровский вычислительный модуль 30.
Источник 10 лазерного излучения может содержать исходный лазерный источник 11, обозначенный SOURCE, оптический усилитель 13, обозначенный АО, и выходную оптику 14. Источник 10 лазерного излучения выполнен с возможностью формирования лазерного пучка F, который имеет структуру сходящегося пучка в зоне пространства после выходной оптики 14. Таким образом, пучок F с оптической осью А-А имеет поперечное сечение, которое уменьшается между выходной оптикой 14 и зоной фокусировки, обозначенной ZF, затем увеличивается в виде расходящегося пучка за пределами этой зоны фокусировки ZF. Как известно, зону фокусировки ZF можно уподобить цилиндру с осью А-А, с радиусом w0=λ/(π⋅θ), часто называемым “waist (шейка)”, и длиной 2⋅lR, где lR является длиной Рэлея, равной λ/(π⋅θ2), где θ является половиной угла расхождения лазерного пучка F за пределами зоны фокусировки ZF, выраженного в радианах. Как правило, расстояние между выходной оптикой 14 и зоной фокусировки ZF может составлять от нескольких метров до более 1 км, длина Рэлея может составлять от нескольких метров до 200 метров, а радиус w0 - порядка сантиметра. Длина волны источника 10 лазерного излучения может быть равна, например, порядка 1,55 мкм (микрометра). Половину угла расхождения θ можно оценить на выходе зоны фокусировки ZF в направлении распространения пучка на расстоянии D равном 2 км от центра О зоны фокусировки ZF. В частности, в плоскости Р поперечного сечения пучка F, которая находится на расстоянии D от центра О, с противоположной стороны от выходной оптики 14, θ является половиной угла при вершине конуса, с вершиной О, который содержит точки М плоскости Р, где интенсивность лазерного излучения уменьшается в 1/е2 раза по сравнению с интенсивностью в точке Z - пересечения плоскости Р с осью А-А, при этом е является основанием натурального логарифма. На фиг. 2 показаны эти параметры лазерного пучка F, формируемого источником 10. Оптическая ось А-А образует центральное направление распространения пучка F. Выходная оптика 14 может, в частности, представлять собой собирающую линзу и определять размер выходного отверстия источника 10 лазерного излучения. Например, это выходное отверстие может иметь радиус около 0,07 м.
Гетеродинный детекторный блок 20 может содержать фотодетектор 22, обозначенный PD, оптические соединители 15, 16 и 21, обозначенные СО, и четвертьволновую пластину 17, обозначенную λ/4, которые расположены таким образом, чтобы объединять обратно рассеянную часть лазерного пучка F с частью FREF лазерного пучка, генерированного исходным лазерным источником 11. Эта часть FREF лазерного пучка, генерированного исходным лазерным источником 11, выполняет функцию контрольного лазерного сигнала, упомянутого в общей части настоящего описания. Как известно, обратно рассеянная часть лазерного пучка F, которая таким образом детектируется, в основном исходит из зоны фокусировки ZF и производится рассеивающими частицами, находящимися в этой зоне.
Наконец, доплеровский вычислительный модуль 30 может представлять собой компьютерный блок, обозначенный РС, который содержит программу, предназначенную для обработки сигналов, выдаваемых фотодетектором 22. На выходе он выдает оценку составляющей скорости рассеивающих частиц, которые находятся в зоне фокусировки ZF, причем эта составляющая параллельна оси А-А и обозначена VA-A.
Работа такой лидарной системы хорошо известна специалистам в данной области, поэтому повторять ее описание нет необходимости. Точно так же, известно использование этой лидарной системы для осуществления измерений анемометрической скорости. В этом случае источник 10 лазерного излучения ориентируют таким образом, чтобы зона фокусировки ZF находилась в участке атмосферы, где необходимо определить скорость ветра, и частицы, обратно рассеивающие лазерный пучок F, - это пыль, микрокристаллы или капли аэрозоля, взвешенные в атмосфере внутри зоны фокусировки ZF.
Согласно изобретению, к описанной выше лидарной системе добавлено устройство 40 временного контроля лазерного пучка F, например, внутри источника 10 лазерного излучения между исходным лазерным источником 11 и оптическим усилителем 13, чтобы разделять лазерный пучок F на последовательные лазерные импульсы. Например, устройство 40 может представлять собой акустооптический модулятор, обозначенный МАО, с соответствующим блоком его управления. Альтернативно, устройство 40 временного контроля лазерного пучка F может быть выполнено на основе электрооптического модулятора, полупроводникового оптического усилителя, часто обозначаемого SOA от “semiconductor optical amplifier”, или системы включения и выключения источника 10 лазерного излучения. В альтернативных вариантах выполнения устройство 40 временного контроля может быть встроено в источник 10 лазерного излучения. Например, источник 10 лазерного излучения может содержать мультимодальный лазерный усилительный резонатор, собственная мода которого может выделяться источником возбуждения, который вводит исходное излучение в этот лазерный усилительный резонатор. В этом случае источник возбуждения может быть регулируемым импульсным лазерным источником. Лазерный пучок F, выходящий из лазерного усилительного резонатора, состоит из последовательных импульсов, которые соответствуют, каждый, импульсам источника возбуждения.
В заявленной лидарной системе лазерные импульсы, регулируемые устройством 40, имеют индивидуальную продолжительность, меньшую 20 мкс. Такое максимальное значение обеспечивает условие, что участок атмосферы, который может находиться на оси А-А на заднем плане зоны фокусировки ZF на большом от нее расстоянии и который может иметь большой потенциал по обратному рассеянию излучения, например, такой участок, как облако, не будет вносить свой вклад в детектированный сигнал при наложении его влияния на сигнал из зоны фокусировки ZF.
В контексте изобретения, продолжительность лазерного импульса определяют, через максимальное мгновенное значение его мощности, как продолжительность, разделяющую момент начала импульса, в который мгновенное значение мощности превышает половину максимального мгновенного значения мощности, и момент конца импульса, в который мгновенное значение мощности опять становится меньше половины максимального мгновенного значения мощности.
Кроме того, согласно изобретению, лазерные импульсы, регулируемые устройством 40, имеют продолжительность отдельного импульса, превышающую или равную двойной длине Рэлея lR, поделенной на скорость распространения лазерных импульсов в атмосфере. Таким образом, пространственную селективность участка атмосферы, в котором осуществляют измерение анемометрической скорости, определяют по зоне фокусировки ZF, как и в случае, описанном выше для лидарной системы непрерывного излучения. Когда длина Рэлея lR равна 50 м, продолжительность каждого отдельного из лазерных импульсов должна превышать 0,33 мкс. Например, продолжительность каждого лазерного импульса может быть равна тройной длине Рэлея lR, поделенной на скорость распространения лазерных импульсов в атмосфере, то есть 1 мкс при lR = 50 м.
Одновременно, при оптимизированном использовании такой лидарной системы с целью осуществления измерений анемометрической скорости, продолжительность каждого импульса можно также выбрать таким образом, чтобы она составляла от 0,2 до 5-кратного, предпочтительно от 0,5 до 1,2-кратного эффективного времени атмосферной когерентности в зоне фокусировки ZF. Это время атмосферной когерентности зависит, в частности, от перемещений частиц, которые создают обратное рассеивание лазерного излучения. Если такое время атмосферной когерентности по существу равно 1мкс, то продолжительность каждого отдельного лазерного импульса предпочтительно выбирают от 0,2 мкс до 5 мкс, предпочтительно от 0,5 мкс до 1,2 мкс.
При таком режиме импульсного излучения, для импульса прямоугольного профиля могут применяться значения мгновенной мощности лазерного пучка от 100 Вт до 5⋅105 Вт, например, 500 Вт. Такие значения не досягаемы при непрерывном лазерном излучении, учитывая доступные компоненты оптического усиления или совместимые с рассматриваемыми применениями.
На диаграмме на фиг. 3 представлено сравнение импульсного лазерного излучения описанной выше предложенной лидарной системы для измерений анемометрической скорости с двумя известными другими системами. Горизонтальная ось показывает время, обозначенное t, а вертикальная ось показывает мгновенные значения мощности излучения, обозначенные Pinstant. Импульсы, обозначенные INV, соответствуют возможному лазерному излучению в атмосфере для заявленной системы; оно состоит из последовательных прямоугольных импульсов, каждый шириной, равной 1 мкс, и с мгновенной мощностью, равной 500 Вт, новый импульс через каждые 71,4 мкс. Такой режим излучения соответствует средней непрерывной мощности около 7 Вт. Значение отношения CNP_sp, полученное при помощи такой заявленной лидарной системы, сфокусированной на 300 м (метров) от выходной оптики 14 и с радиусом лазерного пучка F 5 см (сантиметров) на уровне этой выходной оптики, равно 8,6 при коэффициенте β обратного рассеяния атмосферы в зоне фокусировки лазерного пучка F, который составляет 2⋅10-10 ср-1⋅м-1 (ср от стерадиан). Эти условия соответствуют пространственному разрешению, равному двойной длине Рэлея lR приблизительно 40 м, и значение 8,6 для отношения CNP_sp получают путем интегрирования сигнала на 0,1 с (секунды), то есть объединяя N=1400 последовательных импульсов.
Линия, обозначенная АА1 на фиг. 3, соответствует лидарной системе непрерывного излучения мощностью 14 Вт. Для получения значения отношения CNP, эквивалентного значению отношения в заявленной системе (импульсы INV), измерения, осуществляемые для N=1 764 000 последовательных окон временного деления, необходимо объединить, что соответствует увеличению отношения CNP_sp, которое пропорционально квадратному корню из числа измерений N, по отношению к значению CNP_sp, относящемуся к каждому индивидуальному измерению. Если каждое окно временного деления имеет индивидуальную продолжительность 1 мкс, то продолжительность цикла измерения, соответствующего CNP_sp=8,6, составляет 1,764 с. Иначе говоря, при равной продолжительности цикла измерения заявленная система позволяет увеличить отношение CNP_sp на множитель, который по существу равен 4,2, по сравнению с лидарной системой непрерывного излучения.
Импульсы, обозначенные АА2 на фиг. 3, соответствуют импульсной лидарной системе, излучение которой состоит из последовательных прямоугольных импульсов с индивидуальной шириной, равной 0,17 мкс, и с мгновенной мощностью, равной 500 Вт, каждый новый импульс через 12,2 мкс. Такой режим излучения соответствует средней непрерывной мощности 7 Вт и пространственному разрешению 40 м, то есть значениям средней непрерывной мощности и пространственного разрешения, которые являются идентичными с этими значениями заявленной лидарной системы с импульсами INV. Для рассматриваемой импульсной лидарной системы радиус лазерного пучка на уровне выходной оптики равен 4,1 см. Для получения такого же значения отношения CNP_sp, как в заявленной системе, необходимо объединить измерения, полученные раздельно для N=524 800 последовательных импульсов АА2, что соответствует увеличению отношения CNP_sp, которое пропорционально квадратному корню из числа измерений N. При этом продолжительность цикла измерения, соответствующего CNP_sp=8,6 для такой импульсной лидарной системы, равна 6,4 с. Кроме того, использование коротких импульсов расширяет измеряемый спектр, что приводит к снижению точности измеренной скорости. Чтобы сохранить точность измеренной скорости эквивалентной точности, которую дает заявленная лидарной система, необходимо было бы объединить измерения, производимые раздельно для N=20 500 000 последовательных импульсов АА2, что соответствует продолжительности измерения в 250 с.
Таким образом, изобретение позволяет уменьшить реальную продолжительность измерения по сравнению с известными системами, при равных значениях отношения CNP_sp.
Лидарной систему в соответствии с изобретением, адаптированную для осуществления измерений анемометрической скорости, можно использовать во многих вариантах применения, среди которых не ограничительно:
- применение на борту летательного аппарата, при котором уменьшенные габарит и вес лидарной системы являются важными преимуществами. При этом система 10 лазерного излучения, гетеродинный детекторный блок 20 и устройство 40 временного контроля могут быть полностью или частично выполнены на основе оптических волокон. На фиг. 4 показан самолет 100, оснащенный такой лидарной системой для осуществления измерений анемометрической скорости в соответствии с изобретением. Предпочтительно система установлена на борту самолета таким образом, чтобы выходная оптика 14 находилась ближе к носу самолета 100 и была обращена в направлении полупространства, которое находится спереди самолета. На фиг. 4 показано расположение центрального направления распространения А-А и полученной в результате этого зоны фокусировки ZF;
- применение, при котором измеряемая анемометрическая скорость может быть низкой, такой как при измерениях на уровне земли или на небольшой высоте, например, при оптимизации работы ветряной турбины, или при измерениях с борта летательных аппаратов, которые могут находиться в режиме зависания. В этом случае оптико-акустический модулятор 40 может также генерировать частотное смещение, применяемое для лазерного пучка F, но без применения к части лазерного пучка FREF, которую получает оптический соединитель от исходного источника 11 и которую используют в качестве контрольного лазерного сигнала для гетеродинного детектирования. Таким образом, значение анемометрической скорости, которое является низким, соответствует частоте гетеродинного биения, близкой к фиксированному значению, не равному нулю, поэтому точность измерения повышается без необходимости применения слишком длинной продолжительности дискретизации;
- применение, при котором расстояние измерения между выходной оптикой 14 и зоной фокусировки ZF должно меняться. Для этого выходную оптику 14 можно адаптировать, чтобы изменять по запросу схождение лазерного пучка F, выходящего через эту оптику. Например, когда лазерный пучок F выходит из конца оптического волокна, выходная оптика 14 может представлять собой собирающую линзу, установленную на держателе, который является подвижным с поступательным движением параллельно оси А-А, чтобы перемещать фокус линзы по отношению к концу оптического волокна. Так, центральная точка О зоны фокусировки ZF может находиться на контролируемом расстоянии от выходной оптики 14, например, от 200 м до 1000 м. В частности, когда это расстояние равно 200 м и радиус лазерного пучка F на уровне выходного отверстия равен 0,08 м, длина Рэлея может составлять порядка 6 м, а когда расстояние измерения между выходной оптикой 14 и центральной точкой О зоны фокусировки ZF равно 1000 м, длина Рэлея может составлять порядка 150 м при том же радиусе 8 см для лазерного пучка F на уровне выходного отверстия;
- применение, при котором необходимо производить измерения трех составляющих скорости. Для этого лазерный пучок F можно поделить по меньшей мере на три вспомогательных пучка, которые имеют разные центральные направления распространения. Лазерные импульсы, излучаемые в соответствии с изобретением на основании пучка F, тоже делятся последовательно или одновременно, каждый, по меньшей мере по трем путям излучения, направленным к отдельным зонам фокусировки. Анализ посредством обратного вычисления доплеровского эффекта частей излучения, обратно рассеянного разными зонами фокусировки, дает измерение составляющих анемометрической скорости, которые параллельны центральным направлениям распространения. При этом, предположив, что скорость ветра как векторная величина является одинаковой во всех зонах фокусировки, легко вывести изменения составляющих скорости ветра по трем осям ортогональной системы координат. Специалист в данной области может производить такое вычисление изменения осей для координат векторной скорости. Например, как показано на фиг. 5, лазерный пучок F с осью А-А поделен на шесть вспомогательных пучков, которые распределены в угловом направлении на поверхности конуса с половиной α угла раскрытия при вершине, равной, например, 15° (градусов). Соответствующие центральные направления распространения шести вспомогательных лазерных пучков обозначены А1-А6, и соответствующие зоны фокусировки обозначены ZF1-ZF6. Направления А1-А6 являются при этом направлениями измерения составляющих скорости ветра и распределены вокруг центрального направления, образованного осью А-А.
Разумеется, изобретение можно воспроизвести, изменяя вспомогательные признаки подробно описанных выше вариантов выполнения, сохраняя при этом по меньшей мере одно из указанных преимуществ. В частности, цифровые значения были указаны только в качестве иллюстрации и могут быть изменены в зависимости от рассматриваемого применения.



Изобретение относится к лидарной системе, адаптированной для проведения анемометрических измерений, а также к способам измерений, в которых используют такую систему. Лидарная система выполнена с возможностью осуществления анемометрических измерений, относящихся к зоне фокусировки (ZF) лазерного пучка (F), излучаемого системой. Система содержит устройство (40) временного контроля лазерного пучка, выполненное с возможностью формирования указанного лазерного пучка в виде последовательных лазерных импульсов таким образом, что каждый лазерный импульс имеет индивидуальную продолжительность, превышающую или равную двойной длине Рэлея (lR), поделенной на скорость распространения лазерных импульсов в атмосфере, и меньшую 20 мкс. Лидарная система позволяет получить для спектрального отношения CNR высокие значения. 3 н. и 9 з.п. ф-лы, 5 ил.
1. Лидарная система, адаптированная для проведения анемометрических измерений, содержащая:
- источник (10) лазерного излучения, выполненный с возможностью излучения лазерного пучка (F) в сторону участка атмосферы, внешнего по отношению к лидарной (LIDAR) системе, таким образом, чтобы указанный лазерный пучок был сходящимся за выходным отверстием источника лазерного излучения и имел минимальное поперечное сечение пучка на половине длины зоны фокусировки (ZF) указанного лазерного пучка, при этом указанная зона фокусировки имеет длину, равную 2⋅λ/(π⋅θ2), измеренную параллельно центральному направлению распространения (А-А) лазерного пучка, где λ - длина волны лазерного пучка, а θ - половина угла, выраженного в радианах, расхождения лазерного пучка за пределами зоны фокусировки со стороны, противоположной источнику лазерного излучения, при этом λ/(π⋅θ2) называется длиной Рэлея (lR);
- гетеродинный детекторный блок (20), выполненный с возможностью принимать часть лазерного пучка (F), обратно рассеянную частицами, содержащимися в зоне фокусировки (ZF); и
- доплеровский вычислительный модуль (30), выполненный с возможностью определения значения скорости частиц на основании сигнала биения, формируемого гетеродинным детекторным блоком (20),
отличающаяся тем, что лидарная система дополнительно содержит:
- устройство (40) временного контроля лазерного пучка, выполненное с возможностью формирования указанного лазерного пучка в виде последовательных лазерных импульсов и объединенное с источником (10) лазерного излучения таким образом, что лазерные импульсы проходят через зону фокусировки (ZF), при этом часть каждого лазерного импульса обратно рассеивается частицами, и устройство временного контроля выполнено также таким образом, что каждый лазерный импульс имеет индивидуальную продолжительность, превышающую или равную двойной длине Рэлея (lR), поделенной на скорость распространения лазерных импульсов в атмосфере, и меньшую 20 мкс.
2. Лидарная система по п. 1, в которой устройство (40) временного контроля выполнено таким образом, чтобы каждый лазерный импульс имел индивидуальную продолжительность, равную тройной длине Рэлея (lR), поделенной на скорость распространения лазерных импульсов в атмосфере.
3. Лидарная система по п. 1 или 2, в которой устройство (40) временного контроля выполнено таким образом, чтобы индивидуальная продолжительность каждого лазерного импульса составляла от 0,2 мкм до 5 мкс, предпочтительно от 0,5 мкс до 1,2 мкс.
4. Лидарная система по любому из предыдущих пунктов, в которой устройство (40) временного контроля лазерного пучка содержит по меньшей мере один компонент, выбранный среди оптико-акустического модулятора, электрооптического модулятора, полупроводникового оптического усилителя, системы включения и выключения источника лазерного излучения и системы выбора собственной моды резонатора усиления лазерного излучения.
5. Лидарная система по любому из предыдущих пунктов, выполненная также с возможностью применения частотного смещения между каждым лазерным импульсом и контрольным лазерным сигналом, используемым гетеродинным детекторным блоком (20), таким образом, чтобы нулевая скорость частиц, содержащихся в зоне фокусировки (ZF), относительно лидарной системы соответствовала частоте, которая не является нулевой, для сигнала биения, формируемого указанным гетеродинным детекторным блоком.
6. Лидарная система по любому из предыдущих пунктов, в которой источник (10) лазерного излучения является источником оптоволоконного типа и выполнен таким образом, чтобы каждый лазерный импульс имел мощность, составляющую от 100 Вт до 5⋅105 Вт, предпочтительно от 200 Вт до 2000 Вт.
7. Лидарная система по любому из предыдущих пунктов, в которой устройство (40) временного контроля лазерного пучка выполнено таким образом, чтобы два последовательных лазерных импульса были разделены временем, составляющим от 3 мкс до 500 мкс, предпочтительно меньшим 100 мкс.
8. Лидарная система по любому из предыдущих пунктов, выполненная с возможностью излучать лазерные импульсы одновременно в нескольких направлениях измерения (А1-А6), которые распределены вокруг центрального направления с углом (α) каждого направления измерения менее 30° относительно центрального направления, чтобы получать соответствующие значения для трех координат скорости частиц.
9. Лидарная система по любому из предыдущих пунктов, в которой источник (10) лазерного излучения содержит переменное устройство фокусировки, выполненное с возможностью изменения расстояния измерения между выходным отверстием указанного источника лазерного излучения и центральной точкой (О) зоны фокусировки (ZF), например, от 200 м до 1000 м.
10. Летательный аппарат (100), характеризующийся тем, что оснащен лидарной системой по любому из пп. 1-9, при этом указанная лидарная система установлена на борту летательного аппарата для осуществления анемометрических измерений во время полета указанного летательного аппарата.
11. Способ анемометрического измерения, содержащий этапы, на которых:
- размещают лидарную систему по любому из пп.1-9 таким образом, чтобы зона фокусировки (ZF) находилась в участке атмосферы, где измеряется анемометрическая скорость;
- выбирают индивидуальную продолжительность лазерного импульса, превышающую или равную двойной длине Рэлея (lR), поделенной на скорость распространения лазерных импульсов в атмосфере, и меньшую 20 мкс; и
- активируют лидарную систему для получения значения скорости частиц, находящихся в зоне фокусировки (ZF).
12. Способ анемометрического измерения по п. 11, в котором устройство (40) временного контроля лазерного пучка регулируют таким образом, чтобы индивидуальная продолжительность каждого лазерного импульса составляла от 0,2- до 5-кратного, предпочтительно от 0,5- до 1,2-кратного времени атмосферной когерентности, которое относится к зоне фокусировки (ZF).
| US 2011141471 A1, 16.06.2011 | |||
| CN 110031868 A, 19.07.2019 | |||
| US 2008043234 A1, 21.02.2008. |
