Изобретение относится к системам управления летательными аппаратами и может быть использовано в производстве различных типов беспилотных летательных аппаратов, например, предназначенных для решения научных задач, связанных с дистанционным зондированием морской среды и мониторингом состояния обширных акваторий.
Беспилотные летательные аппараты (БПЛА), способные осуществлять вертикальные взлёт и посадку, что существенно упрощает их эксплуатацию, являются наиболее подходящим решением для подобных задач. В настоящее время они наиболее широко представлены аппаратами типа мультикоптеров с тремя и более несущими винтами (НВ), управление которыми осуществляется с помощью изменения силы тяги каждого НВ, причём сила тяги винтов изменяется за счёт изменения угловой скорости вращения винтов. Для привода несущих винтов мультикоптеров, благодаря развитию в последние годы силовой электроники, используют бесколлекторные электродвигатели, отличающиеся высокой надёжностью и большими значениями удельной мощности. Система управления мультикоптером, таким образом, сводится к системе управления мощностью нескольких электромоторов, которая легко может быть реализована с использованием микропроцессорной техники.
Для расширения спектра задач, решаемых с помощью БПЛА, увеличивают взлётный вес аппаратов и стремятся к увеличению дальности полёта, что также ведёт к увеличению взлётного веса. При этом растёт потребная мощность двигателей, для снижения которой необходимо снижать нагрузку на ометаемую площадь НВ, что ведёт к увеличению диаметра НВ, при этом момент инерции НВ растёт пропорционально квадрату диаметра, из-за чего полоса пропускания системы, управляющей тягой НВ за счёт изменения угловой скорости вращения НВ сужается, ухудшая характеристики управления. Кроме этого, из-за неблагоприятного распределения индуктивных скоростей при полёте вперёд оказывается низкой энергетическая эффективность мультикоптеров. Самой высокой энергетической эффективностью при полёте вперёд, среди аппаратов с несущими винтами, обладают летательные аппараты (ЛА) поперечной схемы с двумя НВ [Джонсон У. Теория вертолёта: М.: Мир, 1983. Кн.1 с.149]. Для управления такими ЛА применяют системы, осуществляющие управление вектором тяги НВ, как по величине, так и по направлению, при постоянной угловой скорости вращения НВ, что позволяет исключить влияние момента инерции НВ на характеристики системы управления.
Для получения высоких аэродинамических свойств БПЛА с двухвинтовой поперечной схемой ЛА используется система управления с автоматами перекоса и рулевыми машинами, которые являются сложными, высоконагруженным механическими устройствами, требующими большого объём работ по техническому обслуживанию, поэтому работы по упрощению конструкции с сохранением всех аэродинамических преимуществ, даваемых двухвинтовой поперечной схемой ЛА, продолжаются. Разработаны различные типы автоматов перекоса. Так, например, известен автомат перекоса типа "паук", реализованный на вертолетах ОКБ Братухина И.П. (Омега I, Омега II, Б-4, Б-11) и на вертолетах ОКБ Яковлева А.С., например, ЯК-100 (Изаксон А.Н., "Советское вертолетостроение", Машиностроение, 1981, с. 162, с. 251). При управлении циклическим шагом лопасти несущего винта ось автомата перекоса отклоняется от вертикального положения, под действием тяг управления, при этом тяги лопастей перемещаются, изменяя угол установки лопастей, при управлении общим шагом ось перемещается вдоль оси вала несущего винта, через тяги изменяя угол установки лопастей.
Недостатками данной конструкции управления являются: большие нагрузки на оси и проводки управления, это приводит к малой жесткости осей на изгиб и малой жесткости проводки управления в целом, большим размерам и массе тяг и качалок системы управления; увеличивает возможность возникновения колебаний лопастей, что снижает безопасность полета, особенности данной конструкции ограничивают область ее применения на летательных аппаратах больших масс, большие усилия, необходимые для управления несущим винтом, приводящие к необходимости установки тяжелой гидросистемы.
Существуют также другие разновидности автоматов перекоса. Все они отличаются сложностью конструкции, несущей значительные знакопеременные нагрузки, и, в случае автоматической системы управления, например, при управлении автопилотом, требуют включения в каналы управления рулевых машинок [Володко. А.М. Основы лётной эксплуатации вертолётов. Аэродинамика. – М.: Транспорт, 1984, с 87, пат. РФ № 2203835].
С целью упрощения конструкции и снижения нагрузок, действующих в каналах управления, фирма КАМАН предложила систему управления, использующую закрылки, размещённые на лопастях НВ на расстоянии примерно 0.75R от оси вращения, где R – радиус НВ. При этом углы отклонения закрылков могли изменятся как все сразу одинаково на всех лопастях, так и циклически, в зависимости от азимутального положения лопасти. При этом силы, возникающие на закрылках, вызывали закручивание лопасти вокруг оси и, следовательно, изменение углов наклона хорд лопастей к плоскости вращения. Таким образом, система с закрылками фирмы КАМАН осуществляет те же воздействия на винт НВ, что и автомат перекоса обычного типа, заключающийся в изменении угла установки лопастей с помощью отклонения закрылков, которыми управляет автомат перекоса тарельчатого типа (обзор Цаги, "Проектные и экспериментальные исследования скоростных вертолетов и винтокрылых аппаратов", № 296 за 1969 год). При циклическом управлении кольцо автомата перекоса отклоняют от положения перпендикулярного валу несущего винта, и через тяги и качалки отклоняют закрылки, при управлении общим шагом кольцо автомата перекоса перемещают вдоль оси вала несущего винта, через тяги отклоняя закрылки, при этом момент, возникающий при отклонении закрылков, поворачивает лопасти относительно продольной оси на заданный угол установки.
Известна система управления закрылками, в которой изменение угла установки лопастей осуществляют при помощи закрылков, связанных с автоматом перекоса тросами, натянутыми центробежной силой, управление циклическим шагом осуществляют отклонением оси от положения, параллельного оси вала несущего винта, при этом циклически отклоняя через тросы закрылки, а управление общим шагом осуществляют поворотом оси в резьбовом соединении с шарниром при ее движении вдоль оси вала, при этом через тросы отклоняют одновременно закрылки на всех лопастях. (п. РФ № 2371351С1)
К сожалению, предложенное устройство содержит множество взаимно подвижных металлических деталей, нагруженных большими силами, требующих точного изготовления из материалов высокой прочности, требующих смазки, применения защитных уплотнений и технического обслуживания, что увеличивает стоимость изготовления и эксплуатации, а также снижает надёжность летательного аппарата. Кроме того, при возникновении необходимости автоматизации управления ЛА, например, за счёт применения автопилота, или при построении БПЛА, для описанной системы необходимо применение рулевых машин, включённых в каналы системы управления закрылками. Также следует отметить отсутствие в данном решении возможности осуществления компенсации взмаха.
Известна система управления закрылками, описанная в патенте США № 6513762 B2, которая рассматривается нами как наиболее близкое решение.
Система привода закрылка, включает лонжерон, соединённый с аэродинамической оболочкой лопасти, закреплённые на лонжероне посредством торсиона закрылок и привод поворота закрылка, включающий сегмент электромагнитного двигателя, соединённый с закрылком непосредственно, либо через передаточный механизм. При этом неподвижная часть электромагнитного двигателя (статор), соединённая с лонжероном содержит электрические катушки и магнитопровод из стали, а подвижная часть (ротор) закреплена на закрылке и содержит постоянные магниты, размещённые вдоль передней кромки закрылка.
При таком способе управления закрылок используется для того, чтобы изменять угол установки лопастью, осуществляя управление общим и циклическим шагом лопасти за счёт аэродинамической силы, возникающей на закрылке и вызывающей поворот лопасти в осевом шарнире. Однако, при таком способе управления закрылок должен совершать колебания с частотой, как минимум равной частоте вращения НВ, а электромагнитный привод должен преодолевать моменты сил инерции, возникающие на закрылке, колеблющемся с частой, как минимум, равной частоте вращения НВ.
К недостаткам данного конструктивного решения относятся следующие:
1). Размещение закрылка, вписанного в контур плана лопасти, приводит к необходимости применения закрылка увеличенного размера, т.к. плечо действия силы закрылка, необходимое для создания достаточной величины момента, поворачивающего лопасть, мало, что приводит к увеличению массы закрылка, увеличению его момента инерции, что требует увеличения крутящего момента электромагнитного двигателя, его массы и мощности
2). Передняя кромка закрылка, вписанного в контур плана лопасти, не обдувается набегающим потоком, в связи с этим при повороте закрылка возникает аэродинамическая сила, препятствующая повороту закрылка и создающая так называемый шарнирный момент, для преодоления которого необходима дополнительная сила и эта сила должна быть создана также электромагнитным двигателем, что вызывает увеличение его массы и мощности
3). Применение для крепления закрылка на лонжероне торсионного стержня, призванного создавать упругий момент, возвращающий закрылок в исходное положение, дополнительно увеличивает силу, которую должен преодолевать электромагнитный двигатель, что также увеличивает его массу и потребляемую мощность.
4). При выносе закрылка за контур плана лопасти с целью увеличения момента, поворачивающего лопасть, требуется дополнительно применение передаточного механизма, различные варианты которого описаны в прототипе, что увеличивает стоимость и массу устройства, снижая его надёжность, а также увеличивает приведённый момент инерции закрылка, ухудшая частотные характеристики системы
5). Постоянные магниты, размещённые вдоль передней кромки закрылка, имеют большую плотность и, соответственно, массу. Из-за этого закрылок имеет увеличенный момент инерции, что неблагоприятно сказывается на частотных характеристиках системы, вызывая увеличение массы и мощности электромагнитного двигателя. В связи с тем, что на отклонённый закрылок, установленный на лопасти НВ, действует, пропорциональный моменту инерции закрылка, пропеллерный момент, стремящийся уменьшить отклонение лопасти, масса и мощность электромагнитного двигателя должны быть ещё дополнительно увеличены.
Перечисленные недостатки, в конечном итоге, могут сделать описанную конструкцию технически нереализуемой, что косвенно подтверждается отсутствием сведений о конструкциях вертолётов, использующих описанную систему, несмотря на перечисленные в прототипе преимущества, при том, что системы управления вертолётами с помощью закрылков, установленных на концах лопастей давно применяются на серийно выпускавшихся зарубежных вертолётах (HH-44 Haskie, SH-2F Seasprite, K-MAX).
Заявляемое решение направлено на разработку улучшенной системы управления закрылками.
Поставленная задача решается предлагаемой системой управления закрылками, в которой для управления закрылками используют магнитоэлектрический привод, выполненный в виде закреплённого на лопасти обтекаемого корпуса, с закреплёнными в корпусе двумя, расположенными параллельно, одна над другой, группами электрических катушек, обмотки которых соединены последовательно и размещены на трубчатых каркасах, при этом сквозь отверстия верхней группы трубчатых каркасов пропущена верхняя полая тяга, сквозь отверстия нижней группы трубчатых каркасов пропущена нижняя полая тяга, внутри тяг размещены постоянные магниты, разделённые немагнитными втулками, а на концах тяг закреплены наконечники, в которых установлены цилиндрические штифты, входящие в пазы кулисы, закреплённой на оси закрылка, установленной в подшипниках, закреплённых в корпусе привода, а угол поворота оси закрылка измеряется датчиком угла поворота, расположенном в корпусе привода и соединённого с электронным блоком, соединённого с обмотками электрических катушек.
Техническим результатом, получаемым от внедрения данного решения, является повышение надёжности и снижение массы системы управления летательного аппарата, получение возможности осуществить компенсацию взмаха лопастей НВ и возможности осуществления автоматического управления без применения рулевых машин, а также возможность осуществления различных алгоритмов управления лопастями НВ и снижение аэродинамического сопротивления летательного аппарата.
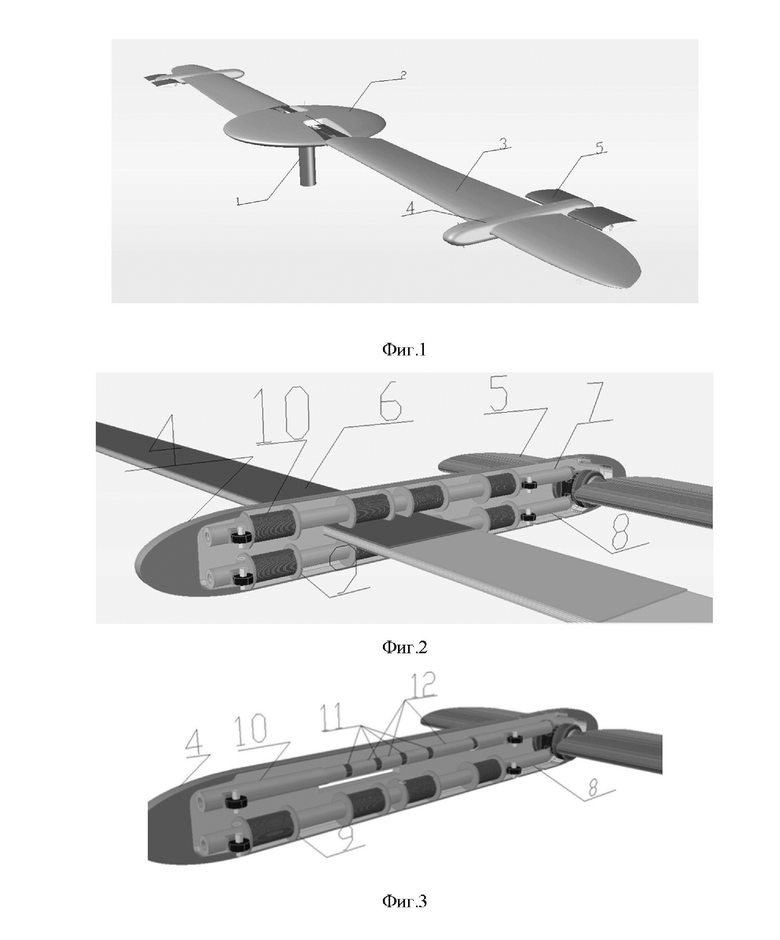
Сущность заявляемой системы изображена на приведенных ниже схематических изображениях (Фиг 1-6), относящихся к одному из возможных вариантов технического исполнения заявляемой системы.
Фиг.1 Размещение закрылка на лопасти несущего винта, где 1 – вал НВ; 2 – обтекатель втулки НВ; 3 – лопасть НВ; 4 – корпус магнитоэлектрического привода закрылка; 5 –закрылок.
Фиг.2 Устройство магнитоэлектрического привода закрылка, где 4 – корпус магнитоэлектрического привода закрылка; 5 –закрылок; 6 – лонжерон лопасти; 7 – верхняя полая тяга; 8 – нижняя полая тяга; 9 – трубчатый каркас электрической катушки; 10 – обмотка электрической катушки.
Фиг.3 Расположение магнитов в тягах магнитоэлектрического привода, где 4 – корпус магнитоэлектрического привода закрылка; 8 – нижняя тяга; 9 – трубчатый каркас электрической катушки; 10 – обмотка электрической катушки. 11 – постоянный магниты; 12 – немагнитная втулка.
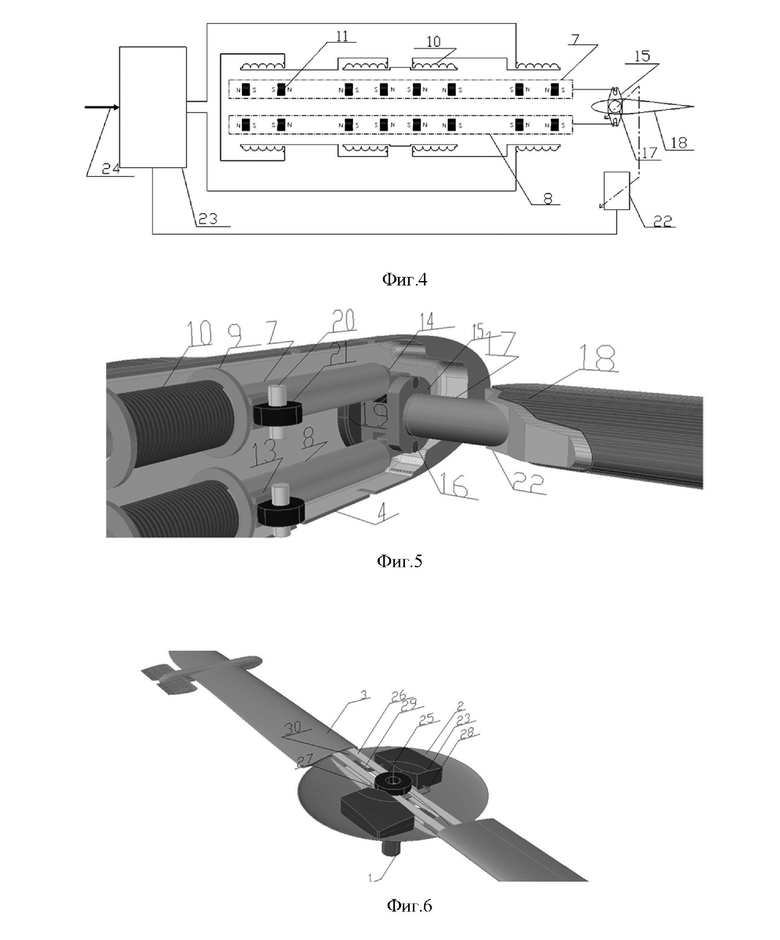
Фиг.4 Блок-схема магнитоэлектрического привода, где 7 – верхняя полая тяга; 8 – нижняя полая тяга; 10 – обмотка электрической катушки; 11 – постоянный магнит; 15 – кулиса; 17 – ось закрылка; 18 – оболочка закрылка; 22 – датчик угла поворота закрылка; 23 – электронный блок; 24 – сигнал системы управления.
Фиг.5 Узел крепления закрылка, где 4 – корпус магнитоэлектрического привода закрылка; 7 – верхняя полая тяга; 8 – нижняя полая тяга; 9 – трубчатый каркас электрической катушки; 10 – обмотка электрической катушки; 13 – опорная площадка; 14 – наконечник полой тяги; 15 – кулиса; 16 – штифт; 17 – ось закрылка; 18 – оболочка закрылка; 19 – радиально-упорный подшипник; 20 – ось ролика; 21 – ролик; 22 – заполнитель оболочки закрылка.
Фиг.6 Электронные блоки, где 1 – вал НВ; 2 – обтекатель втулки НВ; 3 – лопасть НВ; 23 – электронный блок; 25 – втулка НВ; 26 – упругий элемент (лента) подвеса лопасти; 27 – блок системы электропитания; 28 – электрический кабель подачи питания электронному блоку; 29 – электрический кабель подключения обмоток электрических катушек к электронному блоку; 30 – стыковочный узел лонжерона и упругих элементов подвеса лопасти.
Заявляемая система привода закрылков обеспечивает управление силой тяги и моментами несущего винта (НВ). Управление осуществляется за счёт изменения общего и циклического шага лопастей НВ. Изменение шага лопасти достигается за счёт изменения момента аэродинамической силы закрылка относительно продольной оси лопасти, при этом лопасть изменяет шаг под действием изменяющегося момента аэродинамической силы закрылка. Аэродинамическая сила закрылка 5 зависит от угла атаки закрылка, который, в свою очередь, зависит от угла поворота закрылка на оси вращения 17 (фиг.1, фиг.5). При этом на закрылок 5 действуют различные силы, из них наибольшими по величине являются аэродинамическая подъёмная сила и центробежная сила. Центробежная и аэродинамическая силы воспринимается радиально-упорными подшипниками 19 (фиг.5), установленными в корпусе 4, закреплённом на лонжероне 6 лопасти 3 (фиг.1,2). Так как ось вращения 17 отнесена на определённое расстояние от продольной оси лонжерона 6, то, при возникновении на закрылке аэродинамической подъёмной силы, возникает момент этой силы, стремящийся повернуть лопасть вокруг продольной оси лонжерона 6.
Конструктивно существуют различные решения, обеспечивающие возможность поворота лопасти 3 вокруг продольной оси, например, лопасть может быть прикреплена к втулке НВ посредством осевого шарнира; или, например, лопасть может быть прикреплена к втулке с помощью упругих элементов (лент) 26, обеспечивающих возможность поворота лопасти за счёт деформации упругих элементов, как показано на фиг.6. При этом на лопасть, находящуюся в поле действия центробежных сил, действует так называемый пропеллерный момент, стремящийся устранить поворот лопасти вокруг продольной оси; кроме того, если лопасть подвешена к втулке посредством упругих элементов, на лопасть, которая повёрнута вокруг продольной оси на угол шага, будет действовать, помимо пропеллерного, ещё и упругий момент.
Таким образом, момент аэродинамических сил, возникающих на закрылке, поворачивает лопасть из положения равновесия, а пропеллерный и упругий (в случае его наличия) моменты возвращают лопасть в положение равновесия. Таким образом, шаг лопасти определяется, в том числе, аэродинамической силой, возникающей на закрылке, которая, в свою очередь, зависит от угла поворота закрылка относительно оси вращения. Угол поворота закрылка 5 на оси вращения 17 зависит от перемещения в каркасах 9 обмоток 10 электрических катушек полых тяг 7 и 8 с размещёнными внутри постоянными магнитами 11, так как полые тяги 7 и 8 имеют наконечники 14 с цилиндрическими штифтами 16, входящими в пазы кулисы 15, закреплённой на оси 17 закрылка 3. В свою очередь перемещение полых тяг 7 и 8 с магнитами 11 определяется взаимодействием магнитных полей постоянных магнитов 11 с магнитными полями обмоток 10 электрических катушек. Магнитные поля обмоток 10 электрических катушек определяются величиной и направлением протекающего по обмоткам катушек тока, а величина и направление тока определяется электронным блоком 23, в зависимости от сигнала 24, генерируемого системой управления (фиг.4). При этом порядок соединения концов обмоток 10 катушек и ориентация магнитных полей постоянных магнитов 11, установленных внутри полых тяг 7 и 8 обеспечивает перемещение тяг 7 и 8 в противоположных направлениях, обеспечивая поворот кулисы 15, а, следовательно, и закрылка 3 в ту или иную сторону в зависимости от направления протекающего по обмоткам 10 катушек тока. Угол поворота закрылка 3 на оси 17 относительно корпуса 4 измеряется датчиком 22 угла поворота закрылка (фиг. 4), соединённым с электронным блоком, за счёт чего возникает возможность управлять углом поворота закрылка 3 относительно корпуса 4 путём управления, с помощью электронного блока 23, величиной и направлением тока, протекающего через обмотки 10 электрических катушек и, соответственно, управлять величиной аэродинамической силы, возникающей на закрылке, и, соответственно, величиной момента, определяющего общий и циклический шаг лопасти, и, соответственно, моментами и тягой НВ, осуществляя управление ЛА.
Для минимизации усилий, требующихся для поворотов закрылка, целесообразно использовать закрылок с симметричным профилем сечения, при котором ось 17 закрылка проходит через точки аэродинамических фокусов сечений закрылка, а для обеспечения минимальной величины момента инерции закрылка относительно оси 17, возможно использование закрылка, конструктивно состоящего из оболочки 18, закреплённой на оси 17 посредством заполнителя 22 из пенопласта с малым удельным весом. В связи с тем, что тяги 7 и 8 находятся в поле действия центробежной силы, с целью уменьшения трения скольжения тяг 7 и 8 о каркасы 9, на тягах закреплены опорные площадки 13, лежащие на роликах 21, вращающихся на осях 20, закреплённых в корпусе 4. Таким образом, центробежная сила, действующая на тягу (7,8) воспринимается роликами 21 и передаётся на корпус 4 осями 20, при этом трение скольжения заменяется трением качения, имеющим меньшую величину (фиг.5). Ориентация магнитов 11 в тягах 7, 8 а также порядок соединения концов приведены на (фиг.3).
Поступление электрической энергии на магнитоэлектрический привод и сигналов управления на вращающийся НВ, обеспечивает блок электропитания, который может быть реализован различными способами, например, подачей электроэнергии с помощью размещённых на валу НВ нескольких контактных колец со скользящими контактами, расположенными на корпусе ЛА.
Для повышения надёжности и снижения эксплуатационных затрат возможно применить бесконтактный метод: например, на корпусе ЛА разместить постоянные магниты, а на валу НВ, непосредственно в зоне действия магнитных полей постоянных магнитов, разместить генераторные катушки, соединённые с выпрямителем; тогда, при вращении НВ в генераторных катушках будет наводиться электрический ток переменного напряжения, который, будучи выпрямлен с помощью выпрямителя используется для питания электрических катушек магнитоэлектрического привода и системы управления этого привода
Одна из возможных схем размещения элементов, обслуживающих работу магнитоэлектрического привода, приведена на фиг.6. При этом, например, генераторные катушки, выпрямитель и дополнительные аккумуляторы небольшой мощности размещаются в блоке электропитания 27 (фиг.6).
Для передачи сигналов управления закрылками, можно использовать, например, цифровую оптоэлектронную систему, когда на НВ размещается фотоэлектрический приёмник оптических импульсов на основе одного или нескольких фотодиодов, а на корпусе ЛА размещается излучатель оптических импульсов на основе одного или нескольких светодиодов, с целью обеспечить непрерывную, во время вращения НВ, засветку фотоэлектрического приёмника излучаемыми импульсами (на фиг.6 элементы передачи сигналов управления не показаны).
Дополнительное размещение в блоке электропитания аккумуляторов небольшой емкости позволит проводить проверку работу закрылков лопастей и диагностику всей системы управления без необходимости раскрутки НВ, когда генераторные катушки ток не вырабатывают. Электронные блоки 23, управляющие протекающим по обмоткам 10 электрических катушек магнитоэлектрических приводов током, могут быть размещены, например, в обтекателе 2 втулки 25 несущего винта, с целью уменьшения воздействия на электронный блок вибраций и центробежной силы, а также с целью уменьшения поперечного сечения и смачиваемой поверхности корпуса 4 магнитоэлектрического привода (для уменьшения аэродинамического сопротивления корпуса 4), при этом подключение электронных блоков к источнику электроэнергии, к обмоткам 10 электрических катушек привода и к датчику 22 поворота закрылка осуществляется с помощью многожильных кабелей 28 и 29.
Поскольку на лопасть НВ, совершающего маховые движения, как вследствие управляющего воздействия на циклический шаг, так и вследствие полёта с поступательной скоростью, действует сила Кориолиса, которая не вызывает поворота закрылка, а лишь нагружает подшипники оси вращения закрылка, возможны несколько других вариантов, обеспечивающих компенсацию взмаха, например, установку датчика угла взмаха лопасти, и тогда в сигнал управления закрылком вводят соответствующий компенсирующий сигнал.
В связи с тем, что значительная (от 25 до 50%) часть вредного сопротивления такого ЛА, как, например, вертолёт, создаётся втулкой НВ с размещённым на ней автоматом перекоса, что особенно сильно проявляется на вертолётах соосной схемы, имеющих сложную механическую систему, содержащую многочисленные тяги и рычаги, применение магнитоэлектрического привода управления закрылками лопастей НВ позволяет предельно упростить механическую конструкцию втулки НВ и облагородить её обводы, что приведёт к снижению аэродинамического сопротивления и улучшит характеристики ЛА. Предложенный магнитоэлектрический привод управления закрылками позволяет исключить из системы управления вертолётом механическую проводку и гидравлические приводы или рулевые машины, как правило, применяемых в существующих системах управления вертолётами, что ведёт к снижению массы, уменьшению стоимости вертолёта, уменьшению эксплуатационных затрат и повышению надёжности системы управления.
Изобретение относится к системам управления летательными аппаратами и может быть использовано в производстве различных типов беспилотных летательных аппаратов, например, предназначенных для зондирования морской среды и мониторинга состояния обширных акваторий. Система управления закрылками летающего аппарата включает магнитоэлектрический привод, выполненный в виде закреплённого на лопасти обтекаемого корпуса, снабженного установленными внутри двумя расположенными параллельно, одна над другой, группами электрических катушек, обмотки которых соединены последовательно и размещены на трубчатых каркасах. При этом сквозь отверстия верхней и нижней групп каркасов пропущены, соответственно, верхняя и нижняя полые тяги, внутри которых установлены постоянные магниты, разделённые немагнитными втулками. На концах тяг закреплены наконечники, в которых установлены цилиндрические штифты, входящие в пазы кулисы, закреплённой на оси закрылка, установленной в подшипниках, закреплённых в корпусе привода, а соединённые последовательно обмотки электрических катушек подсоединены к электронному блоку, к которому подсоединен установленный в обтекаемом корпусе привода датчик угла положения закрылка. Техническим результатом, получаемым от внедрения данного решения, является повышение надёжности и снижение массы системы управления летательного аппарата, получение возможности осуществить компенсацию взмаха лопастей НВ и возможности осуществления автоматического управления без применения рулевых машин, а также возможность осуществления различных алгоритмов управления лопастями НВ и снижение аэродинамического сопротивления летательного аппарата. 1 з.п. ф-лы, 6 ил.
1. Система управления закрылками летающего аппарата, включающая магнитоэлектрический привод, выполненный в виде закреплённого на лопасти обтекаемого корпуса, снабженного установленными внутри двумя расположенными параллельно, одна над другой, группами электрических катушек, обмотки которых соединены последовательно и размещены на трубчатых каркасах, при этом сквозь отверстия верхней и нижней групп каркасов пропущены, соответственно, верхняя и нижняя полые тяги, внутри которых установлены постоянные магниты, разделённые немагнитными втулками, а на концах тяг закреплены наконечники, в которых установлены цилиндрические штифты, входящие в пазы кулисы, закреплённой на оси закрылка, установленной в подшипниках, закреплённых в корпусе привода, а соединённые последовательно обмотки электрических катушек подсоединены к электронному блоку, к которому подсоединен установленный в обтекаемом корпусе привода датчик угла положения закрылка.
2. Система управления по п. 1, отличающаяся тем, что система снабжена датчиком угла взмаха лопасти.
| US 2022024570 A1, 27.01.2022 | |||
| US 2007102589 А1, 10.05.2007 | |||
| DE 102005017307 A1, 26.10.2006 | |||
| КАТАЛИЗАТОР ДЛЯ ПОЛУЧЕНИЯ 1-ЭТИЛ-2,3-ДИАЛКИЛ(ФЕНИЛ)АЛЮМИНАЦИКЛОПЕНТ-2-ЕНОВ | 2009 |
|
RU2423178C2 |
| US 5195702 A, 23.03.1993 | |||
| KR 920006205 A, 27.04.1992. | |||
