Изобретение относится к области авиастроения, в частности к системам управления винтокрылыми летательными аппаратами, и может быть использовано на всех типах вертолетов.
Известны автоматические системы для снижения уровня вибраций и шума вертолета, для которых в настоящее время в литературе существует целый ряд названий: системы управления несущим винтом по высоким гармоникам, системы индивидуального управления лопастями, более общее название: системы активного управления несущим винтом.
Принцип действия этих систем основан на применении различных устройств, способных изменять с достаточно высокой частотой угол установки лопасти, или крутку лопасти, или аэродинамические свойства лопасти путем применения различных устройств, расположенных на лопасти: управляемых закрылков, интерцепторов (закрылков типа Герни), устройств местного увеличения хорды и т.п.
В частности, управляемые (активные) закрылки, установленные на лопастях несущего винта, как описано, например, в патенте US 2010/0178167 А1, могут приводиться в действие различными актуаторами, например пьезоэлектрическими (патенты US 5224826 и US 6135713), электромеханическими (статья 0401, AHS 69th Annual Forum, May 21-23, 2013), пневматическими (патент US 8647059 В1) или гидравлическими (патент US 6200096 В1).
Известны также системы (J. Shen, I. Chopra, "Actuation requirements for a swashplateless Helicopter control system with trailing-edge flaps", 43rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, 22-25 April 2002, Denver, AIAA 2002-1444; J. Shen, M. Yang, I. Chopra, "Swashplateless helicopter rotor system with active trailing-edge flaps for primary and vibration controls", 45th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics & Materials Conference, 19-22 April 2004, Palm Springs, California AIAA 2004-1951; L. Yang, W. Chao, "Active control for performance enhancement of electrically controlled rotor", Chinese Journal of Aeronautics, (2015), 28(5): 1494-1502), в которых активные закрылки используются для управления вертолетом без автомата перекоса. В таких системах на активный закрылок подается сигнал на частоте первой гармоники, т.е. на частоте Ω. оборотов несущего винта. В результате закрылок изменяет свой угол установки точно так же, как автомат перекоса изменяет циклический и общий шаг лопастей. Необходимо только, чтобы фаза сигнала по первой гармонике соответствовала бы фазе, с которой это выполняется с помощью автомата перекоса. Эта фаза называется углом опережения управления (ψупр) и закладывается конструктивно в кинематику автомата перекоса. В системе активного управления без автомата перекоса с рычагами управления в кабине пилота должны быть установлены устройства, которые бы при отклонении рычагов управления задавали бы в систему управления закрылками сигналы, которые бы изменяли циклические и общие отклонения закрылков так же, как автомат перекоса (будь он установлен) изменял бы циклический и общий шаг лопастей.
В системах управления несущим винтом вертолета с автоматом перекоса нагрузки от шарнирных моментов лопастей, передающиеся через автомат перекоса на систему управления, как правило, довольно высоки. Для восприятия этих нагрузок в системе управления, даже на легких вертолетах, полетным весом 1000-1500 кг устанавливаются гидроусилители. На средних вертолетах, полетным весом 5000-10000 кг, усилие, создаваемое каждым гидроусилителем, составляет 1500-2000 кг. Для снижения шарнирных моментов лопастей предлагаются различные механические устройства, в частности с использованием отклоняемой задней кромки лопасти, как описано, например, в патенте US 4461611. Главным недостатком подобных, чисто механических устройств является отсутствие возможности их точной настройки на определенный режим полета.
Известна система управления лопастями несущего винта вертолета с помощью активных закрылков, являющаяся прототипом данного технического решения (статья F.A. King, J.-B. Maurice, and W. Fichter, "In-Flight Rotorblade Tracking Control for Helicopters Using Active Trailing-Edge Flaps", Journal of Guidance, Control, and Dynamics, Vol. 37, № 2, 2014, pp.633-643), где активное снижение вибраций осуществляется за счет сигналов по первой и второй гармоникам оборотов несущего винта. Причиной появления таких вибраций является дисбаланс (нарушение соконусности) несущего винта, возникающий в результате различия в характеристиках (масса, момент инерции, центровка, геометрия аэродинамических профилей, чистота обработки поверхности) отдельных лопастей. Уменьшение дисбаланса достигается путем ввода на активные закрылки управляющих сигналов по первой и второй гармоникам оборотов несущего винта.
Недостатком такой системы является то, что она имеет ограниченную функциональность - обеспечивает только соконусность несущего винта, но не снижает шарнирные моменты лопастей.
Целью настоящего изобретения является создание системы активного управления несущим винтом с помощью автомата перекоса и управляемых закрылков лопастей, которая бы обеспечивала снижение уровня шарнирных моментов лопастей, а также увеличение эффективности продольно-поперечного управления и управления общим шагом.
Поставленная задача решается благодаря тому, что способ управления вертолетом включает в себя управление несущим винтом с помощью автомата перекоса и управление активными закрылками на лопастях, согласно заявляемому изобретению - на активные закрылки подают управляющие сигналы, соответствующие отклонениям автомата перекоса по продольному и поперечному каналу, а также по общему шагу. Значения амплитуд управляющих сигналов преобразуются в соответствии со следующими зависимостями:
где К1, К2 и К3 - коэффициенты, обеспечивающие максимальное снижение шарнирных моментов лопастей, к, η, ϕош - значения отклонений автомата перекоса по продольному и поперечному каналу, а также по общему шагу.
Закон преобразования управляющего сигнала, подаваемого на привод каждого активного закрылка, имеет вид:

где
δзакр - угол отклонения активного закрылка;
кзакр - амплитуда составляющей циклического отклонения закрылка, соответствующая продольному управлению;
ηзакр - амплитуда составляющей циклического отклонения закрылка, соответствующая поперечному управлению;
ϕош закр - составляющая отклонения закрылка, соответствующая управлению по общему шагу;
ψ - угол азимута лопасти, равный нулю в положении лопасти против полета и отсчитываемый в направлении вращения винта;
ψупр - угол опережения управления.
Поставленная задача решается благодаря тому, что вводят сигнала по 1-ой гармонике оборотов несущего винта с определенной амплитудой и фазой на отклонение активных закрылков лопастей. Величины амплитуды и фазы сигнала определяют из летных испытаний и моделирования на пилотажном стенде. Данный способ позволяет уменьшить шарнирные моменты лопастей, преодолеваемые при отклонениях автомата перекоса посредством одновременного отклонения активных закрылков для создания момента управления того же знака. Благодаря такой системе увеличивается эффективность продольно-поперечного управления и управления общим шагом от обычного автомата перекоса, при этом отклонения равнодействующей силы на несущем винте и увеличение силы тяги происходят не только за счет изменения циклического и общего шага через автомат перекоса, но и за счет соответствующего изменения углов установки активных закрылков. При этом балансировочные отклонения автомата перекоса уменьшаются. Снижение нагрузок от шарнирных моментов лопастей на конструкцию системы управления вертолета приводит к увеличению ресурса всех элементов забустерной части системы управления, включая автомат перекоса.
Заявляемое изобретение поясняется чертежами, где изображено:
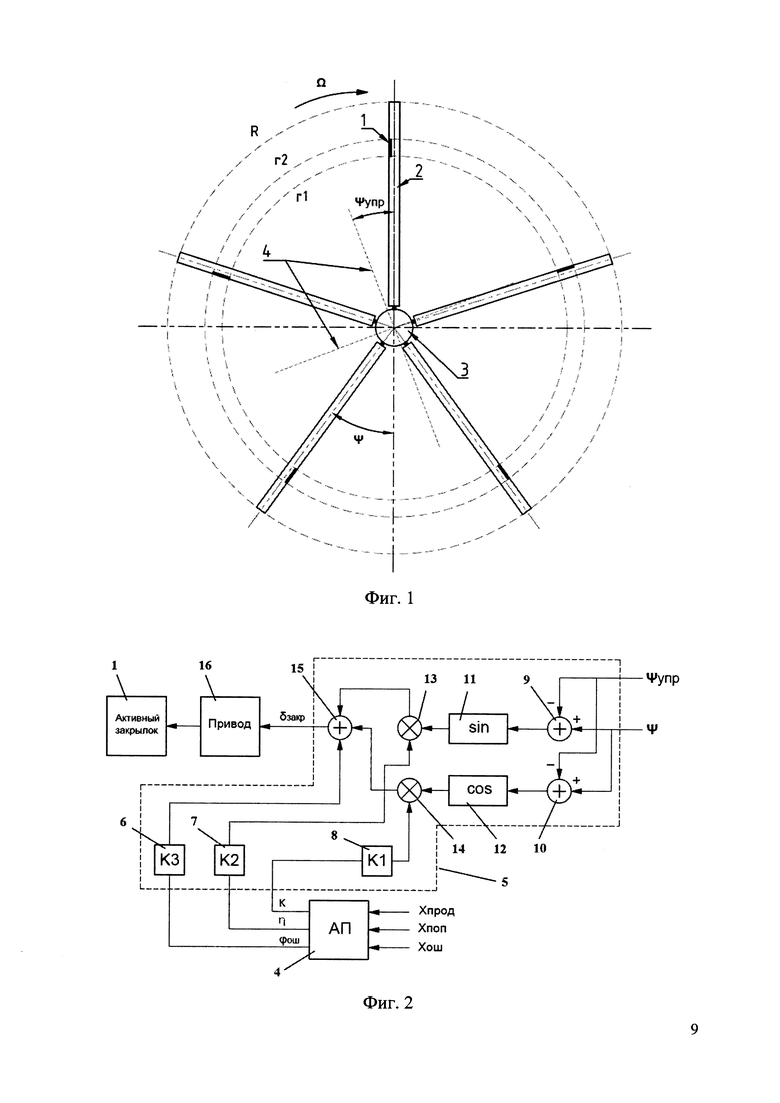
на фиг. 1 - схема несущей системы вертолета;
на фиг. 2 - схема системы управления несущим винтом вертолета с помощью активных закрылков.
Несущая система вертолета включает в себя активный закрылок 1 на лопасти 2, втулку 3 и автомат перекоса 4 (на фиг. 1 показаны оси).
Автомат перекоса 4 системы управления вертолета осуществляет изменения углов установки лопастей 2 в зависимости от азимута по закону:

где ϕлоп - угол установки лопасти (угол поворота лопасти в осевом шарнире), к, η, ϕош - значения отклонений автомата перекоса по продольному и поперечному каналу, а также по общему шагу, ψ - угол азимута лопасти, равный нулю в положении лопасти против полета и отсчитываемый в направлении вращения винта (ψ=Ωt), Ω - угловая скорость вращения несущего винта вертолета, ψупр- угол опережения управления (фиг. 1).
Система активного управления несущим винтом согласно настоящему изобретению включает в себя активный закрылок 1 с электромеханическим приводом на каждой лопасти 2 несущего винта. Управление активными закрылками может также осуществляться с помощью приводов других типов, например пьезоэлектрических или пневматических.
Управление одновинтовым вертолетом осуществляется следующим образом - в обычном режиме, при выключенной системе активного управления несущим винтом пилот управляет вертолетом и задает значения отклонения автомата перекоса 4 (фиг. 2) по продольному к и поперечному η каналам, а также по общему шагу ϕош посредством перемещения рычага продольного (сигнал Хпрод) и поперечного (сигнал Хпоп) управления и рычага общего шага (сигнал Хош).
При включении системы управления значения отклонений автомата перекоса 4 по продольному (к) и поперечному (η) каналам, по общему шагу (ϕош), а также значения угла азимута лопасти ψ и угла опережения управления ψупр подают на вход вычислителя 5. В блоках 6, 7 и 8 вычислителя 5 выполняют преобразование значений к, η, ϕош, обеспечивая тем самым отклонения управления вертолетом при помощи закрылков, соответствующих отклонениям управления с помощью автомата перекоса путем реализации зависимостей:

где к, η, ϕош - значения отклонений автомата перекоса 3 по продольному и поперечному каналу, а также по общему шагу, К1, К2 и К3 - коэффициенты, которые выбирают экспериментальным путем в процессе летных испытаний системы для обеспечения максимального снижения шарнирных моментов лопастей. Нахождение этих коэффициентов возможно расчетным путем с помощью математического моделирования динамики движения лопастей несущего винта. Для этого требуется достаточно сложная математическая модель. Однако ввиду того, что даже наиболее сложная из имеющихся сейчас моделей все равно недостаточно точно описывает данное явление, полученные расчетным путем значения данных коэффициентов подлежат уточнению в летных испытаниях.
В блоках 9 и 10 вычисляют разность сигналов ψ-ψynp. Далее сигнал ψ-ψупр подают на вход блоков 11 и 12, где сигналы преобразуют по законам синуса и косинуса. В блоках 13 и 14 выполняют логическое преобразование (умножение) сигналов с выходов блоков 7, 8 и 11, 12. Результирующие сигналы с выходов блоков 6, 13 и 14 поступают на вход сумматора 15. В результате на выходе вычислителя 5 получают сигнал, преобразованный в соответствии со следующим законом

где δзакр - угол отклонения активного закрылка 1, кзакр - составляющая циклического отклонения закрылка, соответствующая продольному управлению, ηзакр - составляющая циклического отклонения закрылка, соответствующая поперечному управлению, ϕош закр - составляющая отклонения закрылка 1 лопасти, соответствующая управлению общим шагом, ψ - угол азимута лопасти, равный нулю в положении лопасти против полета и отсчитываемый в направлении вращения винта (ψ=Ωt), Ω - угловая скорость вращения несущего винта вертолета, ψупр - угол опережения управления.
Полученный сигнал δзакр подают на привод 16, отклоняя тем самым активный закрылок 1.
Таким образом, в систему активного управления несущим винтом подают сигналы, которые при отклонении управления изменяют циклические отклонения закрылков и их отклонения по общему шагу так же, как автомат перекоса изменяет циклический и общий шаг лопастей. При этом закрылки отклоняют с частотой, равной первой гармонике оборотов несущего винта Ω.
Изобретение относится к способу управления вертолетом. Для управления вертолетом подают управляющие сигналы, соответствующие отклонениям автомата перекоса по циклическому шагу и общему шагу, значения амплитуд управляющих сигналов преобразуют в соответствии с определенными зависимостями, после чего на основании полученных значений формируют управляющие сигналы, подаваемые на привод каждого активного закрылка. Обеспечивается увеличение эффективности управления несущим винтом вертолета. 2 ил. 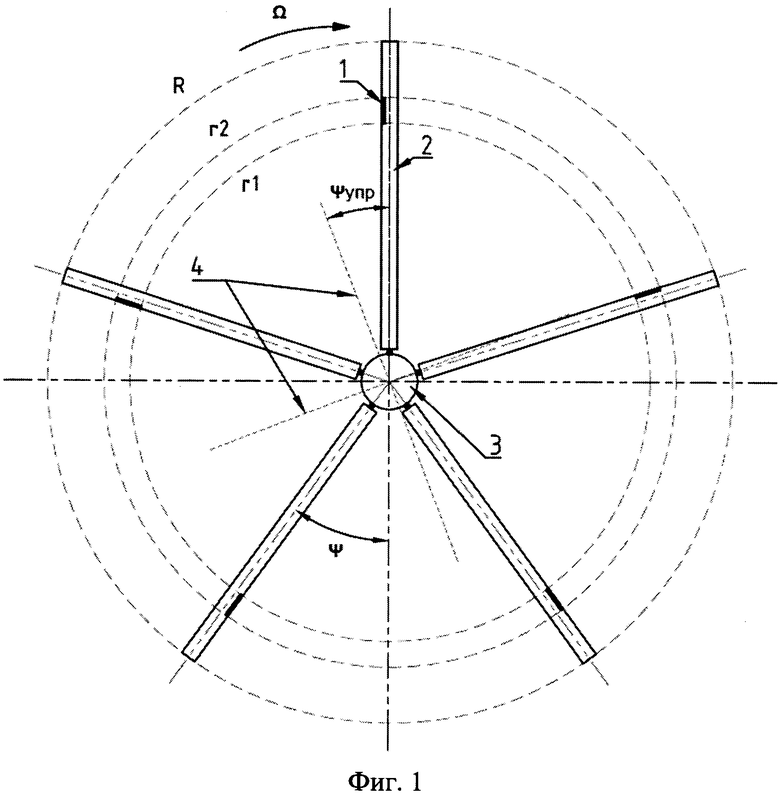
Способ управления вертолетом, включающий управление несущим винтом с помощью автомата перекоса и управление активными закрылками на лопастях несущего винта отличающийся тем, что на активные закрылки подают управляющие сигналы, соответствующие отклонениям автомата перекоса по циклическому шагу, а также по общему шагу, значения амплитуд управляющих сигналов преобразуют в соответствии со следующими зависимостями:
κзакр=К1κ,
ηзакр=К2η,
ϕош закр=К3ϕош,
после чего формируют управляющие сигналы, подаваемые на привод каждого закрылка:
δзакр=κзакрcos(ψ-ψупр)+ηзакрsin(ψ-ψупр)+ϕош закр,
где К1, К2 и К3 - коэффициенты, которые выбирают экспериментальным путем для обеспечения максимального снижения шарнирных моментов лопастей;
κ, η, ϕош - значения отклонений автомата перекоса по продольному и поперечному каналу, а также по общему шагу;
δзакр - угол отклонения активного закрылка;
κзакр - амплитуда составляющей циклического отклонения закрылка, соответствующая продольному управлению;
ηзакр - амплитуда составляющей циклического отклонения закрылка, соответствующая поперечному управлению;
ϕош закр - составляющая отклонения закрылка, соответствующая управлению общим шагом;
ψ - угол азимута лопасти, равный нулю в положении лопасти против полета и отсчитываемый в направлении вращения винта;
ψупр - угол опережения управления.
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ В СИСТЕМЕ ПРОДОЛЬНОГО УПРАВЛЕНИЯ И УПРАВЛЕНИЯ ОБЩИМ ШАГОМ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2556043C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2371351C2 |
| US 9181811 B2, 10.11.2015 | |||
| Способ получения кормовой добавки для выращивания цыплят бройлеров | 2021 |
|
RU2774843C1 |

