Изобретение относится к авиации, а именно к аэродинамическим летательным аппаратам предназначенным для полетов на сверх больших высотах и может, в частности, использоваться как носитель космических ракет (вариант - для космического туризма).
Для существующих аэродинамических летательных аппаратов оказывается предельной высота полета 20÷25 км, да и то в сверхзвуковом (т.е. крайне неэкономичном) диапазоне скоростей. Известен и летательный аппарат (патент RU №2595065) который благодаря использованию вертикальной гирлянды из множества равномерно разнесенных по высоте аэродинамических крыльев при полете в дозвуковом диапазоне скоростей способен достичь сверх больших высот (до 40 км), но к сожалению примененные на нем в качестве движителей стандартные винтомоторные установки в разреженной атмосфере на таких высотах оказываются неэффективны (не обеспечивают необходимого тягового усилия).
Целью изобретения является создание движителей способных обеспечить необходимое тяговое усилие при полете в разреженной атмосфере на больших высотах.
Указанная цель достигается тем, что летательный аппарат, содержащий грузонесущий фюзеляж подвешенный к гирлянде аэродинамических крыльев равномерно разнесенных по высоте и поперечно соединенных между собой канатами с возможностью перемещения упомянутых крыльев, по изобретению он снабжен двигательной установкой, включающей гидроцилиндры и полиспасты, которые размещены в фюзеляже, а упомянутая гирлянда выполнена с возможностью разнонаправленного перемещения в вертикальной плоскости с изменением углов атаки крыльев при выполнении функции движительной установки. При этом, каждый упомянутый полиспаст включает один блок шкивов и другой блок шкивов с возможностью перемещения одних блоков шкивов относительно других. На верхних крыльях гирлянды установлены электроприводные винтомоторные установки. Кроме того, каждое крыло в гирлянде продольно разделено на секции и крайние из которых могут изменять угол атаки относительно смежных с ними секций. Также на концах крайних секций крыльев установлены электроприводы с маховиками.
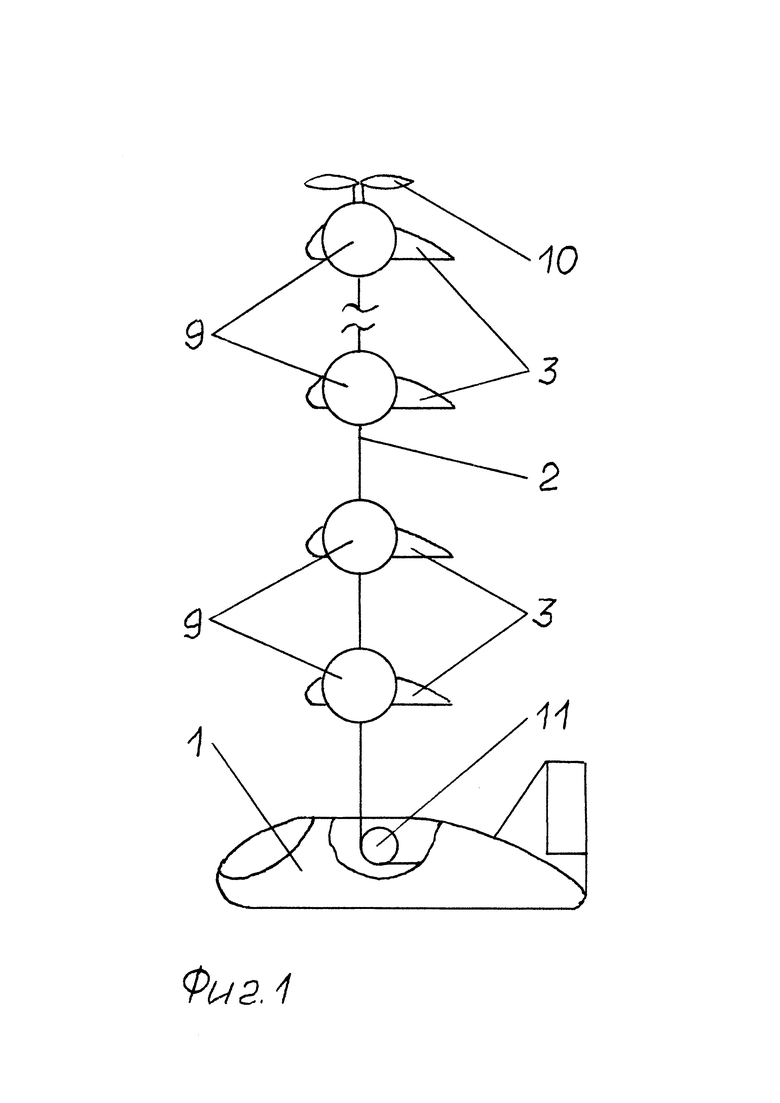
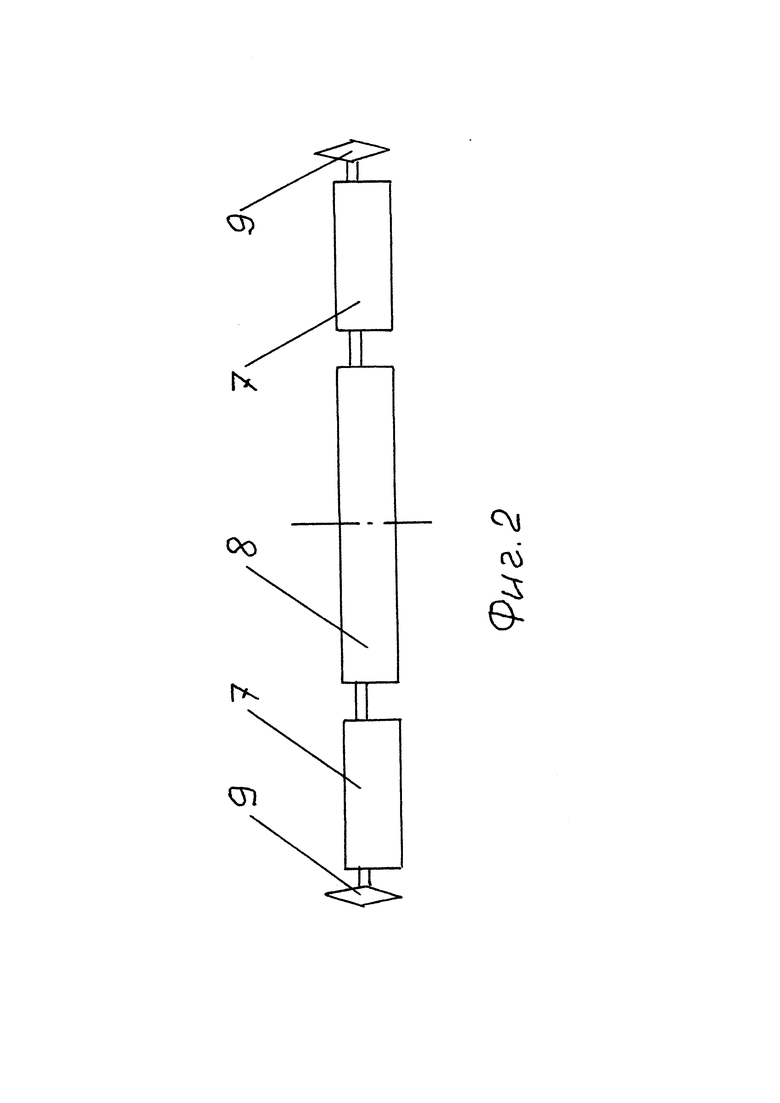
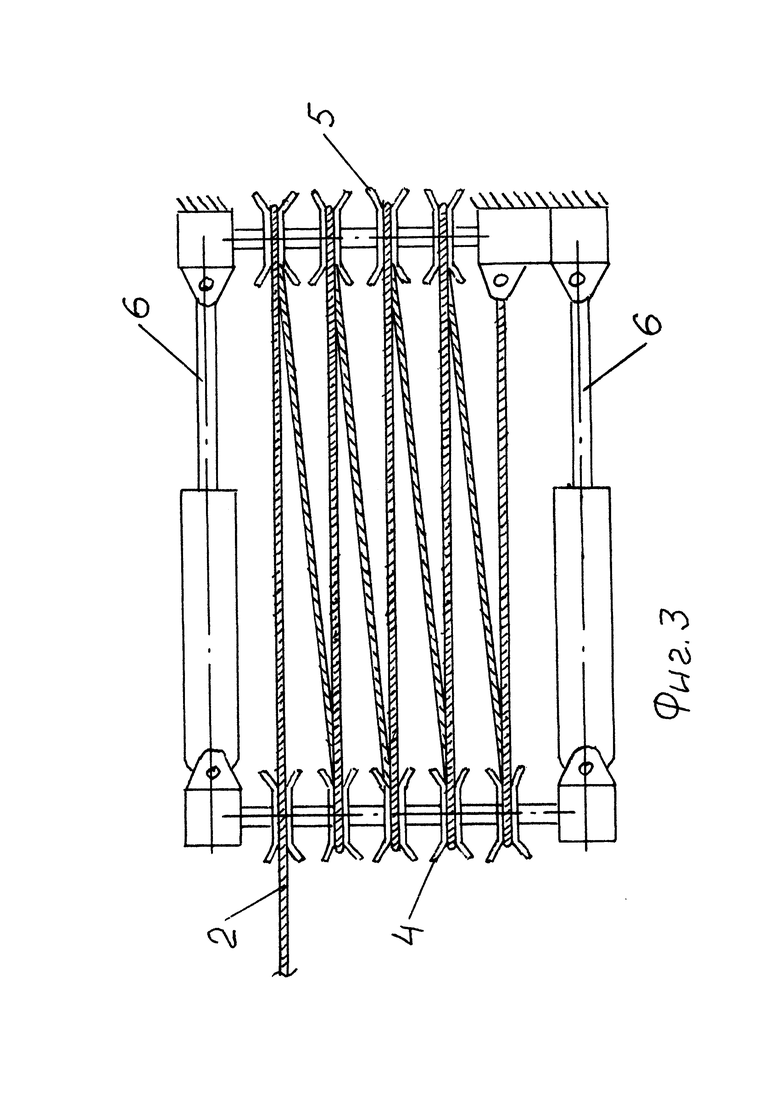
На фиг. 1 изображен летательный аппарат, вид сбоку. На фиг. 2 показано устройство одного из крыльев гирлянды. На фиг. 3 показано устройство приводного механизма (одного из двух).
Летательный аппарат содержит грузонесущий фюзеляж 1 подвешенный на канатах 2 к гирлянде аэродинамических крыльев 3. Нижние ветви канатов 2 запасованы на двух полиспастах состоящих из подвижных блоков 4 и неподвижных 5. Для приведения блоков 4 в движение используются гидроцилиндры 6. Крылья 3 продольно разделены на автономные секции 7 и 8 и для изменения угла их атаки используются электроприводные маховики 9 с переменной частотой вращения установленные на концах секций крыльев 7. Верхние крылья 3 оснащены электроприводными винтомоторными установками 10. Для присоединения канатов 2 к блокам 4 и 5 полиспастов используются отводные блоки 11.
Летательный аппарат функционирует следующим образом. Фюзеляж 1 устанавливается на взлетно-посадочную полосу и с помощью винтомоторных установок 10 гирлянда крыльев 3 поднимается в воздух на рабочую высоту. После чего к передней части фюзеляжа 1 пристыковывается вертолет - буксировщик (патент RU №2627912 - не показан) разгоняет летательный аппарат до взлетной скорости, поднимает его на безопасную высоту и отстыковывается. Далее с помощью гидроцилиндров 6 подвижные блоки 4 полиспаста удаляются от неподвижных блоков 5 втягивая нижние ветви канатов 2 внутрь полиспастов и подтягивая гирлянду крыльев 3 к фюзеляжу 1. При этом с помощью маховиков 9 крылья 3 устанавливаются в положение соответствующее режиму планирования с образованием при этом горизонтального тягового усилия. При достижении гирляндой крайнего нижнего положения с помощью маховиков 9 крылья 3 увеличивают угол атаки обеспечивая подъем гирлянды в исходное положение. Гидроцилиндры 6 на этом этапе переводятся на холостой режим работы не создавая значительного сопротивлении сближению блоков 4 и 5 полиспастов.
Поскольку полет будет сопровождаться значительными вертикальными перемещениями фюзеляжа 1, то этот летательный аппарат может быть беспилотным. А для повышения быстродействия полиспастов гидроцилиндры 6 могут быть заменены дизельными двигателями с дискретным отбором мощности (патент RU №2772007). При этом на высотах с достаточно плотной атмосферой для питания двигателей воздухом используются турбокомпрессоры (не показаны), а для выхода в стратосферу (кратковременного) используется жидкий кислород в сосудах дьюара (не показаны).
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИПЛАН | 2021 |
|
RU2766483C2 |
| ПОДЪЕМНАЯ АЭРОДИНАМИЧЕСКАЯ ПЛАТФОРМА | 2018 |
|
RU2686608C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ-1 | 2016 |
|
RU2639373C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОЛЁТА АЭРОСТАТА (УУТПА) | 2015 |
|
RU2603870C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ - 3 | 2016 |
|
RU2641375C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ - 2 | 2016 |
|
RU2632387C1 |
| НИЗКОСКОРОСТНОЙ САМОЛЁТ БОЛЬШОЙ ГРУЗОПОДЪЁМНОСТИ | 2015 |
|
RU2595065C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ - 2 РГ | 2017 |
|
RU2661260C1 |
| КОНВЕРТОПЛАН-1 | 2017 |
|
RU2666503C1 |
| ВЕРТОЛЁТ-БУКСИРОВЩИК | 2016 |
|
RU2627912C1 |
Изобретение относится к летательным аппаратам. Летательный аппарат содержит грузонесущий фюзеляж, подвешенный к гирлянде аэродинамических крыльев, равномерно разнесенных по высоте и поперечно соединенных между собой канатами с возможностью перемещения упомянутых крыльев. Летательный аппарат снабжен двигательной установкой, включающей гидроцилиндры и полиспасты, которые размещены в фюзеляже. Гирлянда выполнена с возможностью разнонаправленного перемещения в вертикальной плоскости с изменением углов атаки крыльев при выполнении функции движительной установки. Изобретение направлено на увеличение высоты полета в разреженной атмосфере. 4 з.п. ф-лы, 3 ил.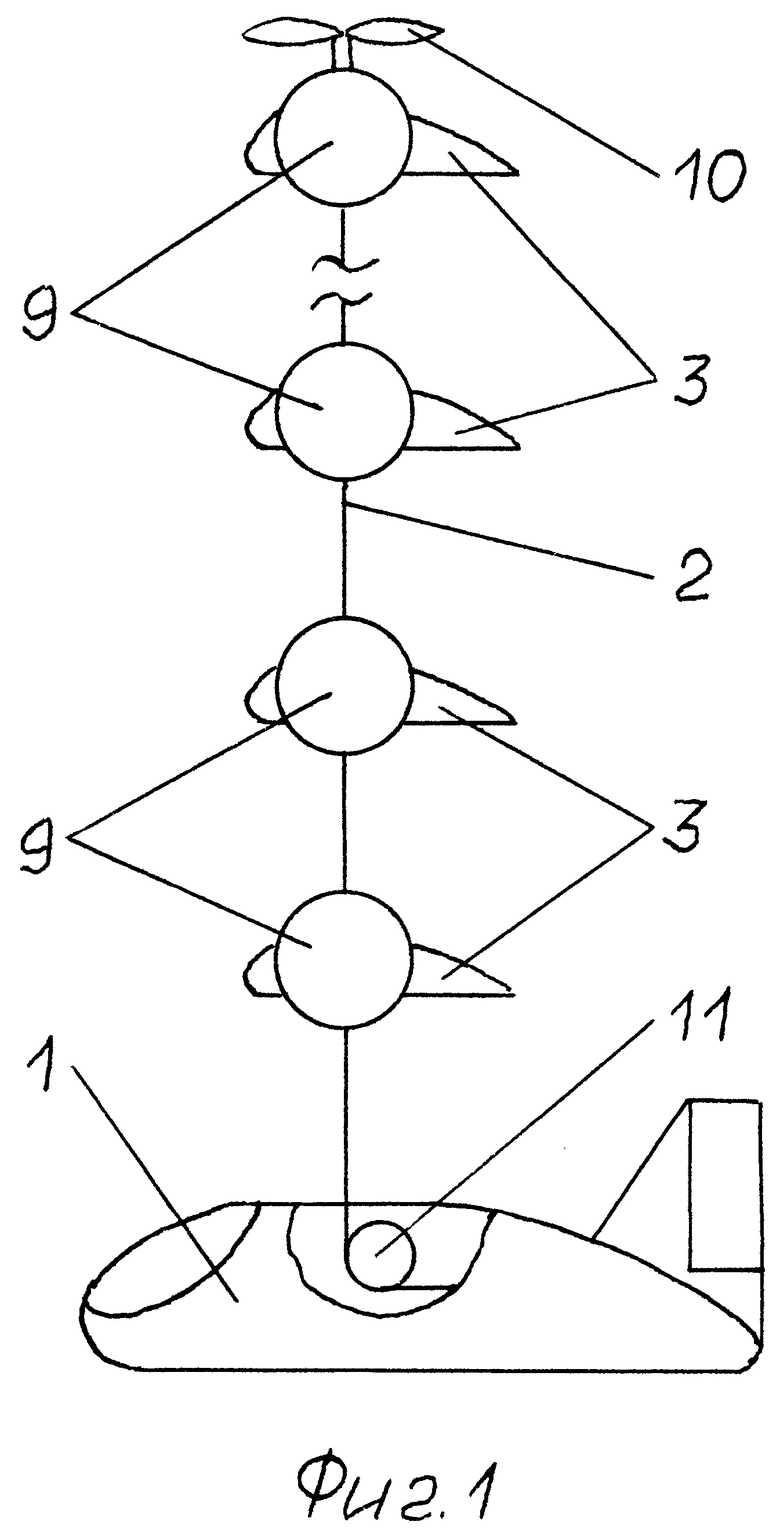
1. Летательный аппарат, содержащий грузонесущий фюзеляж, подвешенный к гирлянде аэродинамических крыльев, равномерно разнесенных по высоте и поперечно соединенных между собой канатами с возможностью перемещения упомянутых крыльев, отличающийся тем, что он снабжен двигательной установкой, включающей гидроцилиндры и полиспасты, которые размещены в фюзеляже, а упомянутая гирлянда выполнена с возможностью разнонаправленного перемещения в вертикальной плоскости с изменением углов атаки крыльев при выполнении функции движительной установки.
2. Аппарат по п. 1, отличающийся тем, что каждый упомянутый полиспаст включает один блок шкивов и другой блок шкивов с возможностью перемещения одних блоков шкивов относительно других.
3. Аппарат по п. 2, отличающийся тем, что на верхних крыльях гирлянды установлены электроприводные винтомоторные установки.
4. Аппарат по п. 3, отличающийся тем, что каждое крыло в гирлянде продольно разделено на секции, крайние из которых могут изменять угол атаки относительно смежных с ними секций.
5. Аппарат по п. 4, отличающийся тем, что на концах крайних секций крыльев установлены электроприводы с маховиками.
| НИЗКОСКОРОСТНОЙ САМОЛЁТ БОЛЬШОЙ ГРУЗОПОДЪЁМНОСТИ | 2015 |
|
RU2595065C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РАСПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ НАГРУЗОК НА КРЫЛЕ ЛЕТАТЕЛЬНОГО АППАРАТА И КРЫЛО ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 1988 |
|
RU2026240C1 |
| US 6250585 B1, 26.06.2001 | |||
| US 20170166307 A1, 15.06.2017 | |||
| WO 2015193742 A1, 23.12.2015 | |||
| US 10526086 B2, 07.01.2020 | |||
| US 20170101177 A1, 13.04.2017. | |||
