Изобретение относится к области воздухоплавания, а именно к управляемым аэростатам, и может быть использовано для создания большегрузных транспортных аэростатов. Управляемый аэростат позволит доставлять грузы, в частности крупногабаритные, в места, недоступные для авиации.
Известны управляемые аэростаты, использующие для вертикальных перемещений, в поисках воздушных потоков нужной направленности, естественную разницу в скорости и направленности воздушных потоков на разных высотах (Патент RU №2238217), в которых для осуществления вертикальных перемещений используют подъемную силу, создаваемую крыльевой системой, подвешенной к аэростату на длинном тросе. При этом крыльевая система располагается ниже точки подвешивания и вследствие этого не может иметь большие размеры и создавать значительную подъемную силу, требуемую для управления крупноразмерными аэростатами, а также не может быть использована для осуществления горизонтальных перемещений аэростата.
Целью изобретения является создание устройства, обеспечивающего возможность как вертикальных, так и горизонтальных перемещений крупноразмерного аэростата.
Технически указанная цель достигается тем, что в устройстве управления траекторией полета аэростата (далее УУТПА), использующем для этого естественную разницу в скорости и направленности воздушных потоков на разных высотах и состоящем из крыльевой системы, создающей подъемную силу, подвешенной к аэростату на гибкой связи регулируемой длины, по изобретению гибкая связь выполнена в виде полиспаста, с количеством шкивов в каждом из блоков, не меньшем двух, и нижний блок которого крепится к грузонесущему фюзеляжу, а крыльевая система выполнена в виде вертикальной гирлянды, состоящей из множества равномерно распределенных по высоте круглых крыльев, и подвешена к верхнему блоку полиспаста. При этом свободная ветвь троса полиспаста присоединена к механизму, позволяющему изменять длину троса (далее МИДТ). Крылья в гирлянде соединены между собой и грузонесущим фюзеляжем тремя вертикальными, равномерно распределенными тросами, нижние концы которых присоединены к МИДТ. На грузонесущем фюзеляже установлены винтомоторные агрегаты, способные работать в режиме ветрогенераторов.
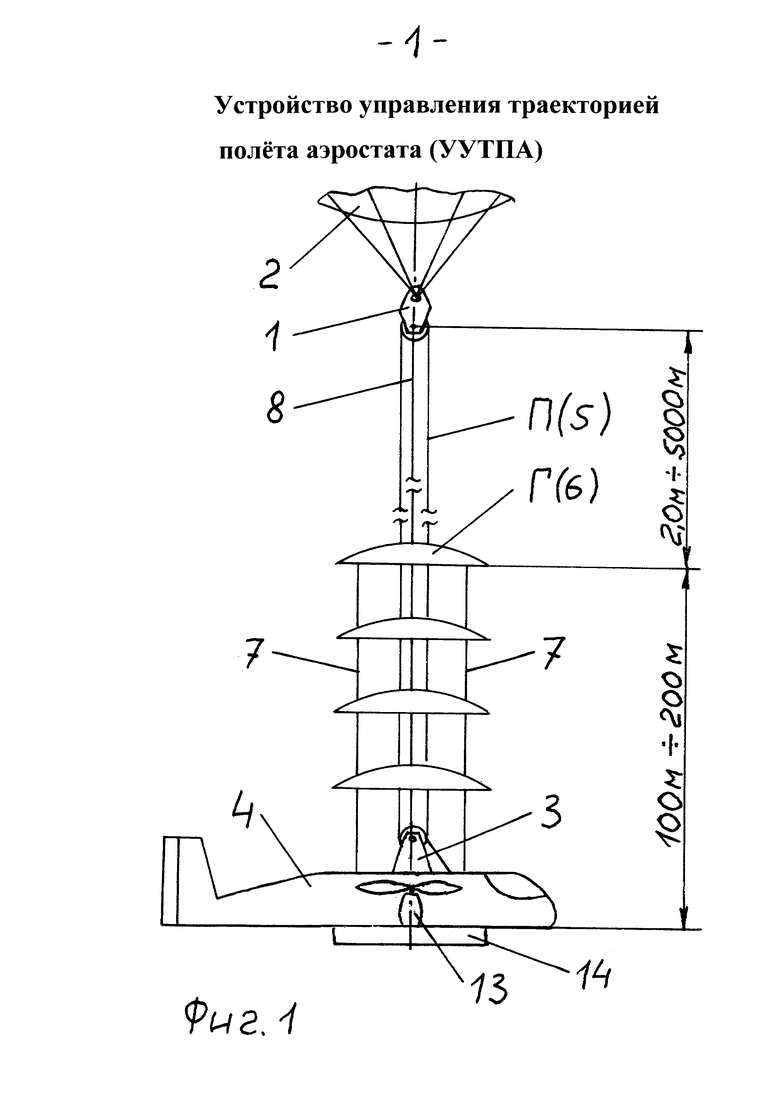
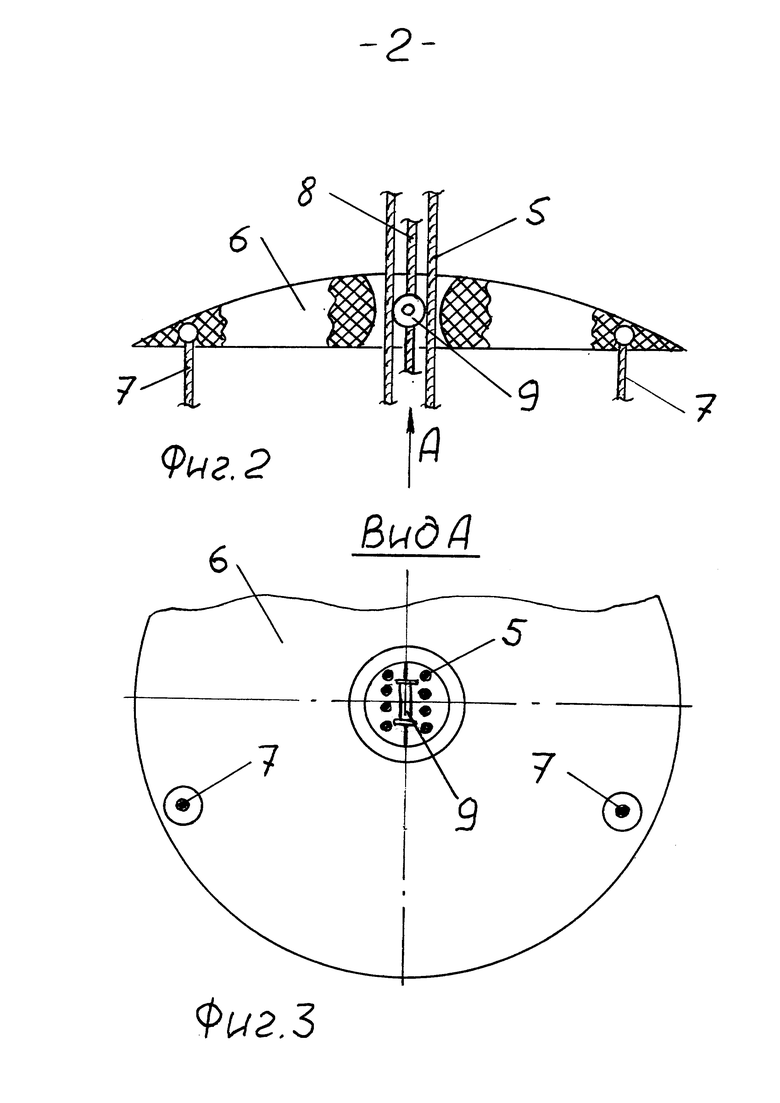
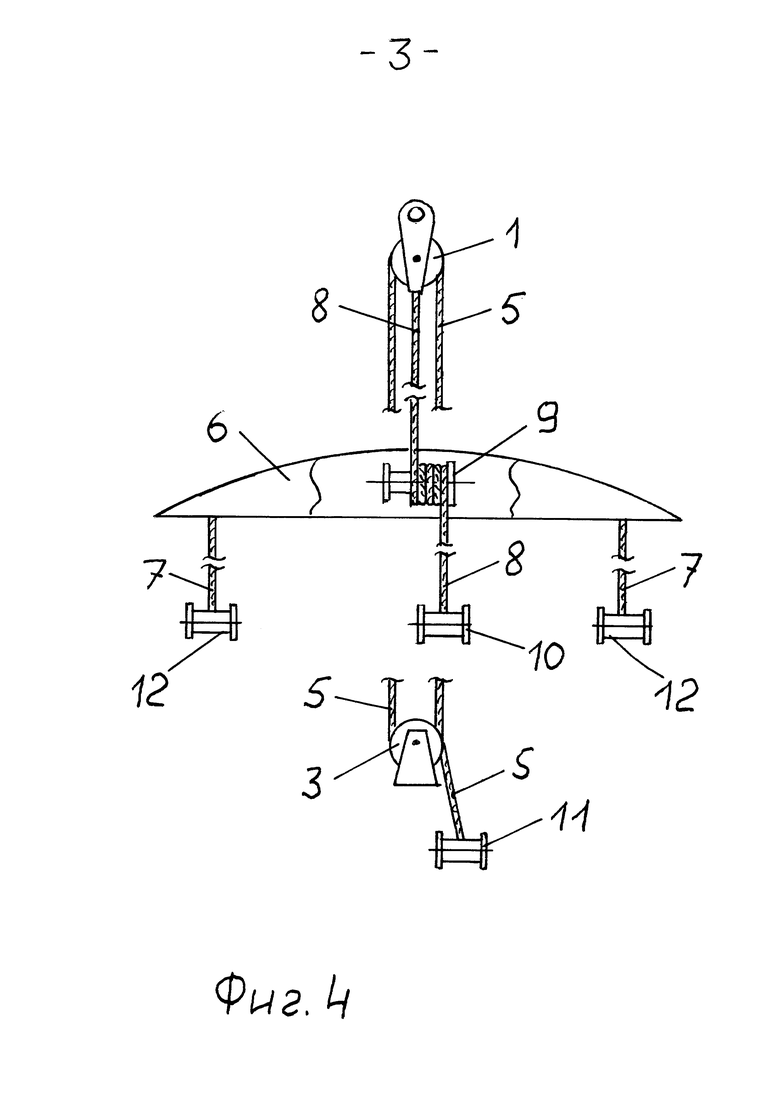
На фиг. 1 изображено УУТПА с аэростатом и грузонесущим фюзеляжем. На фиг. 2 - фрагмент изображения УУТПА. На фиг. 3 - вид А. На фиг. 4 схематично показано управление тросовой системой.
УУТПА состоит из полиспаста «П», верхний блок которого 1 подвешен к аэростату 2, а нижний блок 3 прикреплен к грузонесущему фюзеляжу 4. Тросы 5 полиспаста «П» проходят через центральные окна круглых крыльев 6, образующих гирлянду «Г». Крылья 6 соединены между собой и фюзеляжем 4 тремя вертикальными тросами 7. Верхнее крыло 6 гирлянды «Г» подвешено к блоку 1 полиспаста «П» на тросе 8, намотанном в несколько витков на барабан 9, расположенный в центре верхнего крыла 6. Нижний конец троса 8 присоединен к (МИДТ) 10. Нижний конец троса 5 присоединен к МИДТ 11. Нижние концы тросов 7 присоединены к МИДТ 12. На фюзеляже 4 установлены винтомоторные агрегаты 13, способные работать в режиме ветрогенераторов. Снизу фюзеляжа 4 имеется вакуумная воздушная подушка 14 (вакуумный «якорь»).
УУТПА действует следующим образом. Аэростатом 2 после его заполнения «летучим газом» (водород, гелий) УУТПА с пристыкованным к нему грузонесущим фюзеляжем 4 поднимается в воздух до высоты, где воздушные потоки, взаимодействующие с аэростатом 2, имеют нужную направленность. Далее, когда воздушный поток, взаимодействующий с аэростатом 2, утрачивает нужную направленность, начинается поиск другого воздушного потока, имеющего нужную направленность. И для этого используются два способа: 1 - с помощью МИДТ 12 производят синхронный наклон всех крыльев 6 в гирлянде «Г» в двух плоскостях, продольной или поперечной. Наклон крыльев 6 в продольной плоскости приводит к созданию вертикальной подъемной силы (положительной или отрицательной), вызывающей либо подъем аэростата 2, либо его снижение. Наклон же крыльев 6 в поперечной плоскости обеспечивает боковое перемещение аэростата 2, вправо или влево. Способ 2 предполагает изменение расстояния по вертикали между аэростатом 2 и гирляндой «Г» с крыльями 6, что достигается синхронной работой МИДТ 10 и 11. Взлет и посадка, для совершения погрузочно-разгрузочных работ и пережидания неблагоприятных погодных условий, производится с помощью поворотных в вертикальной плоскости винтомоторных установок 13 (как на современных дирижаблях), с удержанием на поверхности земли вакуумным «якорем» 14 (воздушная подушка с давлением воздуха внутри ниже атмосферного).
При использовании для полета высокоскоростных (150÷300 км/ч), высотных (12÷14 км), струйных течений, направленных преимущественно с запада на восток, вероятно, оптимальным будет совершение транспортных операций с полным облетом земли, что в условиях глобализации мировой экономики и с все большим распространением компьютерных технологий становится реальным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРАТОСФЕРНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2022 |
|
RU2799175C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ - 2 РГ | 2017 |
|
RU2661260C1 |
| НИЗКОСКОРОСТНОЙ САМОЛЁТ БОЛЬШОЙ ГРУЗОПОДЪЁМНОСТИ | 2015 |
|
RU2595065C1 |
| МУЛЬТИПЛАН | 2021 |
|
RU2766483C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ-1 | 2016 |
|
RU2639373C1 |
| Аэродинамический воздухоплавательный аппарат | 2015 |
|
RU2609536C1 |
| Винтомоторный самолёт вертикального взлёта | 2015 |
|
RU2613074C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ - 3 | 2016 |
|
RU2641375C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ - 2 | 2016 |
|
RU2632387C1 |
| КОНВЕРТОПЛАН-1 | 2017 |
|
RU2666503C1 |
Изобретение относится к воздухоплаванию. Устройство управления траекторией полета аэростата состоит из крыльевой системы, создающей подъемную силу, подвешенной к аэростату на большом удалении от него. Крыльевая система выполнена в виде вертикальной гирлянды (Г), состоящей из множества равноудаленных друг от друга крыльев (6) круглой формы. Система подвески выполнена в виде полиспаста (П), верхний блок (1) которого присоединен к аэростату (2), а нижний блок (3) прикреплен к грузонесущему фюзеляжу (4). Крылья (6) в гирлянде соединяются между собой и фюзеляжем тремя вертикальными тросами (7), что позволяет синхронно наклонять все крылья в обеих плоскостях, чем и достигается управление полетом аэростата. Изобретение обеспечивает доставку крупногабаритного груза в места, недоступные для авиации. 4 з.п. ф-лы, 4 ил.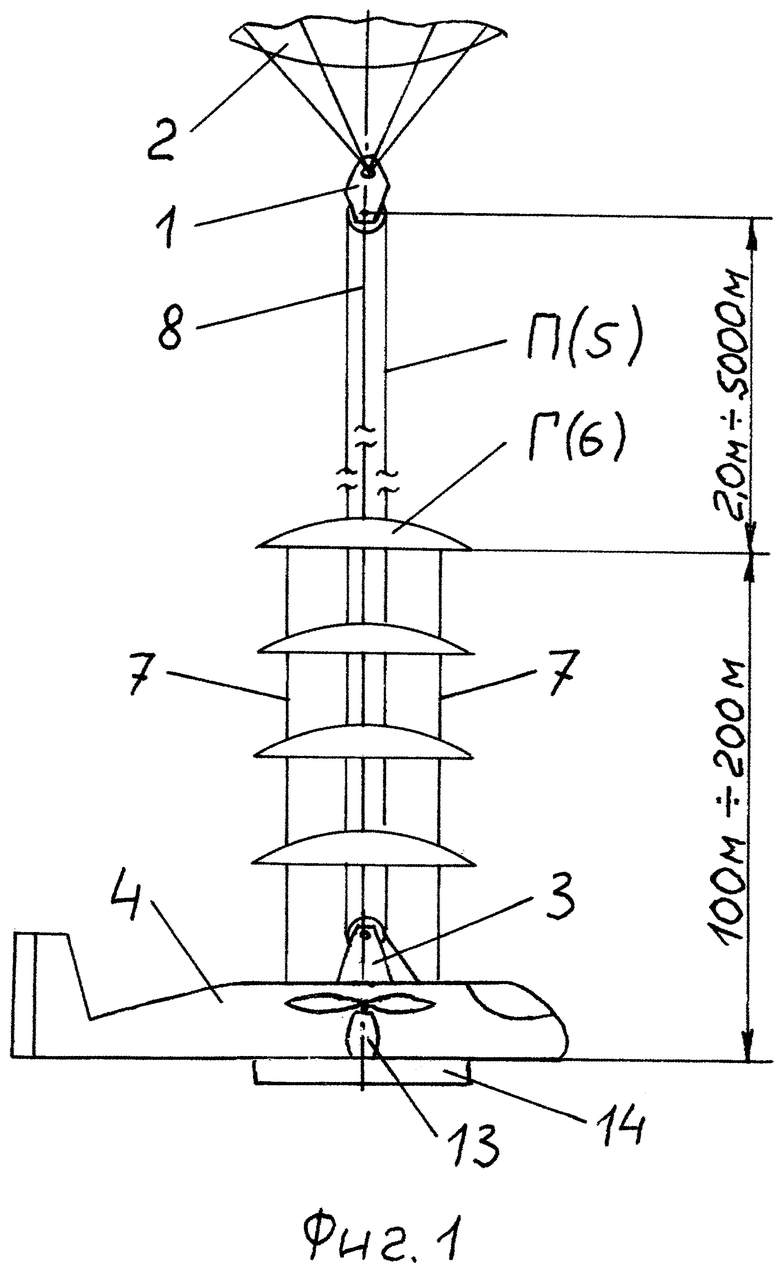
1. Устройство управления траекторией полета аэростата (УУТПА) путем использования естественной разницы скорости и направления воздушных потоков на разных высотах, состоящее из крыльевой системы, создающей подъемную силу, подвешенной к аэростату на гибкой связи регулируемой длины, отличающееся тем, что гибкая связь выполнена в виде полиспаста, с количеством шкивов в каждом из блоков не меньше двух и нижний блок которого крепится к грузонесущему фюзеляжу, а крыльевая система выполнена в виде вертикальной гирлянды, состоящей из множества равномерно распределенных по высоте круглых крыльев и подвешена к верхнему блоку полиспаста.
2. Устройство (УУТПА) по п. 1, отличающееся тем, что свободная ветвь троса полиспаста присоединяется к устройству, позволяющему изменять длину троса.
3. Устройство (УУТПА) по п. 1, отличающееся тем, что крылья в гирлянде, соединяются между собой и грузонесущим фюзеляжем тремя вертикальными, равномерно распределенными тросами.
4. Устройство (УУТПА) по п. 1, отличающееся тем, что на фюзеляже устанавливаются винтомоторные агрегаты, способные работать в режиме ветрогенераторов.
5. Устройство (УУТПА) по п. 3, отличающееся тем, что нижние концы тросов присоединяются к устройствам, позволяющим изменять длину тросов.
| СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ АЭРОСТАТА | 1999 |
|
RU2238217C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ-ПАРАСТАТ | 2001 |
|
RU2207303C2 |
| ПОДВЕСКА, АВТОСТАБИЛИЗИРУЮЩАЯ МЯГКОЕ ПРИВЯЗНОЕ КРЫЛО (ВАРИАНТЫ) | 2010 |
|
RU2456210C2 |
| US 5082205 A, 21.01.1992. | |||

