Изобретение относится к робототехнике и может быть использовано при создании систем управления автономными необитаемыми подводными аппаратами (АНПА) с многостепенными манипуляторами (ММ).
Известен способ управления движением многостепенного антропоморфного манипулятора АНПА, заключающийся в подаче управляющих воздействий на электроприводы сочленений для приведения рабочего органа (РО) ММ в заданное положение с заданной скоростью за заданное время, рассчитываемых в форме алгебраических и трансцендентных выражений на основе упрощенных динамических моделей электроприводов и динамической модели ММ, сформулированной на основе кинематической модели манипулятора, построенной с использованием подхода Денавита – Хартенберга, причем динамическая модель ММ для достижения его конечного состояния преобразуется в систему дифференциальных уравнений, определяющих углы поворота звеньев ММ вокруг их продольных и поперечных осей, правые части которой содержат только искомые управления. (Балабанов А. Н., Безуглая А. Е., Шушляпин Е. А. Управление манипулятором подводного робота // Информатика и автоматизация. – 2021. – Т. 20. – №. 6. – С. 1307-1332).
Недостатком этого способа является то, что управляющие воздействия, подаваемые на электроприводы сочленений ММ, формируются на основе динамических моделей ММ и электроприводов, которые не учитывают реально существующие силовые и моментные воздействия на подводный аппарат со стороны объекта работ, передающиеся через звенья и сочленения манипулятора в точку крепления ММ к основанию АНПА. Но эти воздействия возникают сразу же после установления силового контакта РО (инструмента) ММ с поверхностью объекта работ при выполнении любой силовой технологической операции. В результате эти воздействия приводят к неконтролируемому смещению АНПА в пространстве, а в результате – и к нарушению выполнения заданной технологической операции.
Известен способ позиционно-силового управления АНПА с ММ, заключающийся в формировании закона управления положением аппарата с манипулятором и усилием, оказываемым на поверхность объекта работ, на основе их математической модели, как единого объекта, использующей оценку кориолисовых и центробежных сил и моментов, гидростатических и гидродинамических сил и моментов сопротивлению движению АНПА с ММ, включая вязкие трения и присоединенные массы жидкости, при этом погрешности оценки указанных сил и моментов компенсируются за счет использования регулятора с переменной структурой. (Barbalata C., Dunnigan M. W., Petillot Y. Coupled and decoupled force/motion controllers for an underwater vehicle-manipulator system //Journal of Marine Science and Engineering. – 2018. – Vol. 6. – №. 3. – P. 96).
Недостатком этого способа является то, что при формировании закона управления положением АНПА с ММ не учитываются динамические характеристики электроприводов в сочленениях ММ, а также силовые и моментные воздействия, действующие на АНПА с ММ со стороны объекта работ, вызванные реакцией опоры при силовом воздействии РО манипулятора на поверхность объекта работ. Из-за этого в процессе выполнения манипулятором технологической операции возможна периодическая потеря контакта между инструментом, закрепленным на конце манипулятора, и поверхностью объекта работ, и, вследствие этого, нарушение технологического процесса.
Известен способ управления АНПА в режиме его зависания вблизи или над объектом работ в процессе работы установленного на нем ММ, включающий подачу на входы двигателей всех степеней подвижности манипулятора сигналов, определяемых желаемой программной траекторией движения его РО в пространстве в водной среде и формируемых на основе аналитических соотношений, полученных после решения обратной задачи кинематики для конкретной кинематической схемы ММ, а на входы соответствующих движителей АНПА - сигналов, компенсирующих силовые и моментные воздействия на этот аппарат со стороны ММ, произвольно перемещающегося в вязкой среде, причем сигналы управления движителями АНПА по разомкнутому контуру формируются в реальном масштабе времени на основе аналитических выражений, определяющих силу и момент, с которыми этот манипулятор действует на АНПА, учитывающих все эффекты взаимовлияния между всеми степенями подвижности ММ, а также гидростатические и гидродинамические силы сопротивления его движению, включая вязкие трения и присоединенные массы окружающей жидкости (Филаретов В.Ф., Алексеев Ю.К., Лебедев А.В. Системы управления подводными роботами. - М.: Круглый год. – 2001. – C.171-179; 223-227).
Его недостатком является то, что аналитические выражения, определяющие силу и момент, с которыми ММ действует на подводный аппарат, не учитывают силовые воздействия, оказываемые рабочим органом манипулятора на объекты работ при выполнении технологических операций. Кроме того, используемый разомкнутый контур стабилизации подводного аппарата в пространстве не позволяет обеспечить точную компенсацию всех сил и моментов, действующих на него со стороны манипулятора, вызывая его неизбежные смещения от исходного заданного пространственного расположения.
Известен также способ позиционно-силового управления АНПА с четырехстепенным манипулятором в режиме его зависания и предварительной стабилизации перед началом выполнения силовых операций с объектом работ, которые осуществляют в дальнейшем, учитывая линейные смещения подводного аппарата в пространстве, определяемые системой технического зрения, и его угловые смещения, определяемые бортовыми гироскопическими датчиками, заключающийся в задании переменных желаемых величин и направлений силовых воздействий, оказываемых рабочим органом манипулятора, основание которого закреплено под центром величины подводного аппарата, на объект работ в каждой точке траектории движения его рабочего органа, которую формируют с помощью 3D-модели этого объекта работ, при этом на входы соответствующих движителей подводного аппарата подают сигналы управления, уменьшающие его отклонения от исходного положения при перемещениях манипулятора в вязкой среде, при этом система управления АНПА с ММ построена с использованием наблюдателей только суммарных величин внешних моментов, действующих на выходные валы приводов всех степеней подвижности ММ, эти величины формируют сигналы управления приводами ММ и создают желаемые силовые воздействия ММ на объекты работ в текущей точке траектории движения РО и дополнительные сигналы управления приводами ММ, обеспечивающие перемещения этого РО по указанной траектории, а на входы соответствующих движителей АНПА подают сигналы управления, компенсирующие динамические воздействия на этот аппарат со стороны ММ, эти сигналы рассчитывают по рекуррентному алгоритму, определяющему суммарную величину силового и моментного воздействия на АНПА при перемещении его ММ в вязкой среде и при силовом воздействии РО на объекты работ (Коноплин А.Ю., Красавин Н.А., Юрманов А.П., Пятавин П.А., Кацурин А.А. Система позиционно-силового управления подводными аппаратами с многозвенными манипуляторами для выполнения контактных манипуляционных операций // Подводные исследования и робототехника. – 2022. – № 4. – С. 40-52).
Этот способ является наиболее близким к заявляемому изобретению.
Главным недостатком этого способа является то, что создание желаемого вектора силы со стороны РО ММ на объекты работ осуществляют за счет одновременной подачи полных управляющих воздействий на все приводы всех сочленений ММ. В результате это сразу же создает полный вектор силы на АНПА, равный желаемому вектору силы на объект работ, но противоположный ему по направлению. Поскольку при этом движители самого зависшего над объектом работ АНПА пока совсем не вырабатывают тяги для компенсации уже появившегося полного вектора силы на АНПА со стороны ММ, то, получив мгновенное силовое и моментное воздействие, этот АНПА сразу же начинает смещаться под действием этих силы и момента, отходя от объекта работ, то есть его стабилизация над объектом работ сразу же нарушается. В результате пропадает контакт ММ с объектом работ и его силовое воздействие на этот объект. Получив импульс силы и момента, АНПА продолжит смещаться от объекта.
Как показали исследования, через некоторое время система технического зрения обнаружит отход АНПА от объекта работ, эта информация будет передана с задержкой в его следящую систему, и только после этого начнут (с нуля) раскручиваться его винты, имеющие большую инерционность. В результате АНПА сильно отойдет от его прежнего исходного положения с учетом непрерывно возрастающего отклонения, которое может стать уже необратимым. Одновременно с раскруткой винтов с учетом всех динамических запаздываний начнет изменяться конфигурация ММ для восстановления силового контакта с объектом работ. Поэтому восстанавливающий свое исходное положение АНПА (под действием своей системы стабилизации) и рабочий инструмент ММ через некоторое время начнут свое одновременное движение в сторону этого объекта работ. Это неизбежно приведет к удару рабочего инструмента по этому объекту ввиду неизбежной инерционности АНПА. И весь этот описанный процесс соударений, как показывают исследования предлагаемой системы управления АНПА и ММ, будет постоянно происходить при реализации попыток создания силовых воздействий с помощью ММ на объект работ.
Вторым важным недостатком является отсутствие возможности создания произвольного позиционно-силового управления ММ, который имеет всего 4 степени подвижности. Этого мало для задания любого пространственного вектора силового воздействия на объекты. Для этой цели необходимо иметь шесть степеней подвижности. То есть ММ прототипа в принципе не способен решить задачу произвольного силового воздействия на объект работ.
Третьим недостатком прототипа является то, что при движении РО ММ по траектории для задания желаемого усилия на объект работ в процессе этого движения на входы приводов манипулятора подают дополнительные сигналы управления, которые формируют с учетом только этого желаемого усилия. Но часть указанного усилия будет непременно тратиться на преодоление сухого трения скольжения и сопротивления материала по поверхности объекта. В результате величина и направление вектора этой силы будут значительно отличаться от желаемых или РО в принципе не будет двигаться по указанной траектории.
И, наконец, четвертым существенным недостатком прототипа является то, что применяемые в нем наблюдатели используют для оценки величин только суммарных внешних моментов, действующих на выходные валы приводов всех степеней подвижности ММ, включающих и эффекты взаимовлияния между всеми степенями подвижности манипулятора, и гидростатические силы, и гидродинамические силы сопротивления движению звеньев (включая вязкие трения, присоединенные массы и моменты инерции окружающей жидкости), и возможные силовые воздействия на объекты работ. При этом определение составляющих, обусловленных силовыми воздействиями РО на объекты работ, осуществляется путем вычитания из общего внешнего момента на выходном валу каждого привода ММ рассчитанных с помощью рекуррентного алгоритма составляющих этого внешнего момента, обусловленных гидростатическими и гидродинамическими силами сопротивления движению звеньев, а также эффектами взаимовлияния между всеми степенями подвижности ММ. Но неизбежное наличие больших погрешностей в задании предполагаемых значений присоединенных масс и присоединенных моментов инерции жидкости к звеньям ММ в используемом рекуррентном алгоритме, как показали результаты исследований, обязательно приведет к большим ошибкам в определении и задании реальных величин и направлений векторов силовых и моментных воздействий, а также к большим ошибкам стабилизации АНПА в заданной точке пространства. При этом неизбежно будут наблюдаться потери контактов между объектами работ и рабочими инструментами ММ или периодические удары этих инструментов по указанным объектам работ, которые могут привести к поломкам рабочих инструментов или объектов работ.
Остальные менее значимые недостатки прототипа будут представлены и подробно охарактеризованы при описании и обосновании каждого из признаков отличительной части формулы изобретения.
Задачей заявляемого изобретения является устранение указанных выше недостатков, т.е. точное автоматическое выполнение АНПА с ММ требуемых силовых технологических операций по всей поверхности объектов работ в водной (вязкой) среде.
Технический результат изобретения заключается в неизменно точном автоматическом выполнении манипулятором АНПА различных технологических операций, требующих точного силового взаимодействия РО ММ с подводными объектами, когда необходимо обеспечить точное перемещение РО по любым пространственным траекториям в рабочей зоне ММ с одновременным созданием заданного по величине и направлению силового воздействия со стороны РО на эти объекты без возможных потерь контактов с этими объектами.
В заявленном изобретении это предложено достичь путем точной стабилизации АНПА над подводным объектом с помощью системы технического зрения и датчиков ориентации АНПА в пространстве за счет создания после контакта РО ММ с поверхностью объекта в реальном масштабе времени скоординированных по времени и величине тяг движителей АНПА, которые с учетом текущей конфигурации ММ непрерывно и устойчиво обеспечат создание требуемых по величине и направлению силовых и моментных воздействий на подводный объект, а также точное программное движение ММ в пространстве, которое формируют за счет сигналов, подаваемых на входы соответствующих приводов ММ, которые одновременно учитывают внешние силовые и моментные воздействия, обусловленные взаимодействием этого ММ с объектами работ и его движением в вязкой среде.
Поставленная задача решается тем, что способ позиционно-силового управления автономным необитаемым подводным аппаратом с манипулятором в режиме его зависания и предварительной стабилизации перед началом выполнения силовых операций с объектом работ, которые осуществляют в дальнейшем, учитывая линейные смещения подводного аппарата в пространстве, определяемые системой технического зрения, и его угловые смещения, определяемые бортовыми гироскопическими датчиками, заключающийся в задании переменных желаемых величин и направлений силовых воздействий, оказываемых рабочим органом манипулятора, основание которого закреплено под центром величины подводного аппарата, на объект работ в каждой точке траектории движения его рабочего органа, которую формируют с помощью 3D-модели этого объекта работ. При этом на входы соответствующих движителей подводного аппарата подают сигналы управления, уменьшающие его отклонения от исходного положения при перемещениях манипулятора в вязкой среде. Внешний корпус подводного аппарата выполняют симметричным относительно его главной вертикальной оси в виде эллипсоида, сплющенного вдоль этой оси, причем проекция этого корпуса на плоскость, проходящую через две другие главные оси симметрии, имеет форму круга. Шесть движителей подводного аппарата закрепляют попарно на его главных осях симметрии на одинаковом расстоянии относительно его центра величины так, чтобы оси их тяг попарно всегда были перпендикулярны осям тяг остальных пар движителей и обеспечивали подводному аппарату шесть степеней свободы. Кинематическая схема манипулятора подводного аппарата также имеет шесть степеней свободы, три из которых – переносные и три – ориентирующие. Она дает возможность его рабочему органу обеспечивать любую пространственную ориентацию векторов силового и моментного воздействия на объекты работ, до начала любых рабочих операций во время тестовых движений манипулятора с неподвижно зафиксированным в пространстве корпусом подводного аппарата с помощью фильтра Калмана осуществляют идентификацию масс и моментов инерции окружающей жидкости, присоединяемых к двум главным звеньям переносных степеней подвижности манипулятора, после подхода подводного аппарата и его стабилизации вблизи объекта работ, выявив с помощью системы технического зрения и трех маркеров текущие пространственные расположения подводного аппарата и начальной точки сформированной траектории, а также зная исходное расположение манипулятора, после решения обратной задачи кинематики определяют законы изменения во времени всех его обобщенных координат, после чего переводят рабочий орган манипулятора из исходного положения в начальную точку траектории, синхронно в функции времени подавая сигналы, соответствующие указанным законам изменения обобщенных координат, на входы следящих приводов всех степеней подвижности манипулятора, обеспечивая плавный перевод его рабочего органа из исходного положения до контакта с объектом в начальной точке сформированной траектории. Одновременно с этим по известному рекуррентному алгоритму решения обратной задачи динамики с учетом ранее идентифицированных присоединенных масс и моментов инерции жидкости в реальном масштабе времени рассчитывают силовое и моментное воздействия на подводный аппарат со стороны этого движущегося в водной среде манипулятора, которые компенсируют плавным изменением тяг его соответствующих движителей, стабилизируя подводный аппарат в заданной точке пространства, после выявления типовым тактильным датчиком контакта рабочего органа манипулятора с объектом работ, используя рекуррентные соотношения с учетом текущей конфигурации манипулятора, определяют законы изменения во времени желаемых тяг соответствующих движителей подводного аппарата и желаемых внешних моментов во всех сочленениях манипулятора, с помощью которых также в функции времени формируют желаемые значения входных сигналов на соответствующие движители подводного аппарата и приводы манипулятора, синхронная реализация этих сигналов обеспечивает плавное нарастание от нуля и до конечного значения программного силового и моментного воздействий со стороны рабочего органа на объект работ в начале траектории. При этом сохраняют неизменной исходную текущую конфигурацию манипулятора, одновременно обеспечивая более точную стабилизацию положения и ориентации подводного аппарата в абсолютной системе координат за счет компенсации его движителями плавно нарастающих силовых и моментных воздействий со стороны манипулятора, реально возникающие неточности указанной программной компенсации ликвидируют с помощью типовой системы стабилизации, использующей информацию, получаемую от системы технического зрения, и отрицательные обратные связи по всем степеням свободы подводного аппарата, применяя эту систему, создают дополнительные сигналы управления соответствующими движителями, которые удерживают подводный аппарат в его исходной точке пространства с исходной ориентацией, после формирования исходного вектора силового воздействия со стороны рабочего органа манипулятора на объект работ формируют новую величину и направление этого вектора, который уже учитывает дополнительные составляющие сухого трения и сопротивления движению рабочего органа в начале построенной траектории, указанный вектор также формируют с помощью движителей подводного аппарата путем подачи плавно и синхронно изменяющихся входных сигналов на соответствующие движители и приводы манипулятора, после построения упомянутого вектора в зависимости от выполняемой программы задают скорость перемещения рабочего органа манипулятора по ранее сформированной траектории и начинают это перемещение, подавая на входы позиционно-силовых систем управления приводами манипулятора соответствующие сигналы, в состав которых входят программные и фактические значения обобщенных координат манипулятора, их скоростей и ускорений, а также программные и фактические значения внешних моментов, обусловленные только силовым взаимодействием рабочего органа манипулятора с поверхностью объекта работ, причем фактические значения указанных внешних моментов определяют с помощью диагностических наблюдателей суммарных значений обобщенных внешних моментов, из которых вычитают составляющие взаимовлияний с реальными значениями масс и моментов инерции звеньев манипулятора, моменты от действия гидростатических сил, моменты вязкого трения, а также моменты, обусловленные наличием уже идентифицированных присоединенных масс и моментов инерции жидкости. Во время движения манипулятора по сформированной траектории определяют силовые и моментные воздействия, которые движущийся в водной среде манипулятор оказывает на подводный аппарат в точке его крепления к последнему, эти воздействия рассчитывают с помощью рекуррентного алгоритма, используя идентифицированные величины присоединенных масс и моментов инерции жидкости, моменты вязкого трения, возникающего при перемещениях всех звеньев манипулятора в водной среде, моменты взаимовлияний между всеми степенями подвижности манипулятора, а также силы и моменты, действующие со стороны объекта работ на рабочий орган манипулятора. Все указанные воздействия на подводный аппарат синхронно и плавно компенсируют его движителями. При этом ввиду неточностей определения некоторых параметров силовых воздействий дополнительно используют упомянутую систему стабилизации положения и ориентации подводного аппарата в абсолютной системе координат, с помощью которой формируют дополнительные сигналы управления его движителями.
Сопоставленный анализ признаков заявляемого способа с признаками аналогов и прототипа свидетельствует о соответствии этого способа критерию “новизна”.
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак «…внешний корпус подводного аппарата выполняют симметричным относительно его главной вертикальной оси в виде эллипсоида, сплющенного вдоль этой оси, причем проекция этого корпуса на плоскость, проходящую через две другие главные оси симметрии, имеет форму круга,…», в отличие от использованной в прототипе формы корпуса подводного аппарата, позволяет обеспечить дополнительную пассивную стабилизацию подводного аппарата с манипулятором, представляющего собой неустойчивый перевернутый маятник, вдоль его главной вертикальной оси за счет своей особой формы эллипсоида, сплющенного вдоль этой оси.
Признак «…а шесть движителей подводного аппарата закрепляют попарно на его главных осях симметрии на одинаковом расстоянии относительно его центра величины так, чтобы оси их тяг попарно всегда были перпендикулярны осям тяг остальных пар движителей и обеспечивали подводному аппарату шесть степеней свободы,…» позволяет обеспечить простую и надежную управляемость аппарата по всем шести его степеням свободы за счет предложенного расположения его движителей симметрично относительно его центра величины. При используемой в прототипе конфигурации движителей, где маршевые движители расположены не на одной из главных осей симметрии корпуса подводного аппарата, а смещены к его задней части, в процессе поворота по углу курса аппарата неизбежно происходят линейные смещения его геометрического центра, которые необходимо компенсировать другими парами движителей. В отличие от указанной конфигурации за счет расположения всех движителей подводного аппарата симметрично относительно его центра величины в новом решении удалось обеспечить независимое управление аппаратом по всем шести степеням свободы.
Признак «…кинематическая схема манипулятора подводного аппарата также имеет шесть степеней свободы, три из которых – переносные и три – ориентирующие, она дает возможность его рабочему органу обеспечивать любую пространственную ориентацию векторов силового и моментного воздействия на объекты работ,…», в отличие от используемого в прототипе четырехстепенного манипулятора, позволяет обеспечить любую пространственную ориентацию векторов силового и моментного воздействия рабочего органа манипулятора на объекты работ в пределах его рабочей зоны за счет использования кинематической схемы с тремя переносными и тремя ориентирующими степенями подвижности.
Признак «…до начала любых рабочих операций во время тестовых движений манипулятора с неподвижно зафиксированным в пространстве корпусом подводного аппарата с помощью фильтра Калмана осуществляют идентификацию масс и моментов инерции окружающей жидкости, присоединяемых к двум главным звеньям переносных степеней подвижности манипулятора, …» позволяет точно определять величины присоединяемых к главным звеньям переносных степеней подвижности манипулятора масс и моментов инерции окружающей жидкости с учетом направления набегающего на эти звенья потоков жидкости. В отличие от применения в прототипе каких-то усредненных значений присоединяемых масс и моментов инерции жидкости в новом решении предложена и использована точная идентификация этих значений. Использование указанных значений позволяет с гораздо меньшей погрешностью определять силу и момент, действующие на корпус подводного аппарата со стороны движущегося в вязкой среде манипулятора. Кроме того, эти же значения, входят в суммарные моменты, развиваемые соответствующими приводами манипулятора. В предложенном решении в отличие от прототипа удалось выделить те части момента в функции времени, которые необходимы для создания требуемого движения в конкретной степени подвижности манипулятора и одновременно требуемого момента, который с учетом моментов, формируемых в его остальных степенях подвижности, обеспечивает требуемое силовое воздействие рабочего органа манипулятора на объект работ. Без этого, используя только уже известные методы, невозможно реализовать одновременное качественное позиционно-силовое управление каждой степенью подвижности манипулятора, а в результате - и требуемое точное перемещение рабочего органа манипулятора в целом по заданной траектории с заданным силовым воздействием на объект.
Признак «…после подхода подводного аппарата и его стабилизации вблизи объекта работ, выявив с помощью системы технического зрения и трех маркеров текущие пространственные расположения подводного аппарата и начальной точки сформированной траектории, а также зная исходное расположение манипулятора, после решения обратной задачи кинематики определяют законы изменения во времени всех его обобщенных координат, после чего переводят рабочий орган манипулятора из исходного положения в начальную точку траектории, синхронно в функции времени подавая сигналы, соответствующие указанным законам изменения обобщенных координат, на входы следящих приводов всех степеней подвижности манипулятора, обеспечивая плавный перевод его рабочего органа из исходного положения до контакта с объектом в начальной точке сформированной траектории, одновременно с этим по известному рекуррентному алгоритму решения обратной задачи динамики с учетом ранее идентифицированных присоединенных масс и моментов инерции жидкости в реальном масштабе времени рассчитывают силовое и моментное воздействия на подводный аппарат со стороны этого движущегося в водной среде манипулятора, которые компенсируют плавным изменением тяг его соответствующих движителей, стабилизируя подводный аппарат в заданной точке пространства,…» обеспечивает точный перевод рабочего органа манипулятора из его текущего положения в исходное в начале сформированной на поверхности объекта работ траектории до касания рабочего органа с этим объектом. Во время этого перевода с помощью тяг движителей подводного аппарата плавно обеспечивают стабилизацию его положения и ориентации путем компенсации силовых и моментных воздействий, передаваемых на его корпус со стороны движущегося манипулятора, которые обусловлены моментами вязкого трения, взаимовлияниями между движущимися в вязкой среде звеньями манипулятора, а также наличием точно определенных присоединенных масс и моментов инерции окружающей жидкости.
Признак «…после выявления типовым тактильным датчиком контакта рабочего органа манипулятора с объектом работ, …» позволяет выявить факт появления контакта между рабочим органом манипулятора и объектом работ при переводе этого рабочего органа в начальную точку траектории. В результате удается исключить возможный зазор между поверхностью объекта работ и рабочим органом манипулятора, а, следовательно, и возможное соударение этого органа с объектом на этапе появления силового воздействия на этот объект.
Признак «…используя рекуррентные соотношения с учетом текущей конфигурации манипулятора, определяют законы изменения во времени желаемых тяг соответствующих движителей подводного аппарата и желаемых внешних моментов во всех сочленениях манипулятора, с помощью которых также в функции времени формируют желаемые значения входных сигналов на соответствующие движители подводного аппарата и приводы манипулятора, синхронная реализация этих сигналов обеспечивает плавное нарастание от нуля и до конечного значения программного силового и моментного воздействий со стороны рабочего органа на объект работ в начале траектории, при этом сохраняют неизменной исходную текущую конфигурацию манипулятора, одновременно обеспечивая более точную стабилизацию положения и ориентации подводного аппарата в абсолютной системе координат за счет компенсации его движителями плавно нарастающих силовых и моментных воздействий со стороны манипулятора, реально возникающие неточности указанной программной компенсации ликвидируют с помощью типовой системы стабилизации, использующей информацию, получаемую от системы технического зрения, и отрицательные обратные связи по всем степеням свободы подводного аппарата, применяя эту систему, создают дополнительные сигналы управления соответствующими движителями, которые удерживают подводный аппарат в его исходной точке пространства с исходной ориентацией,…» позволяет обеспечить плавное нарастание силового и моментного воздействий на объект работ от нуля до заданной величины за счет формирования главного вектора и главного момента тяг всеми движителями подводного аппарата при сохранении исходной конфигурации манипулятора, а также исходного положения и ориентации упомянутого аппарата в пространстве. Это является принципиальным отличием от прототипа, в котором формирования векторов силового и моментного воздействий на объект работ осуществляют подачей соответствующих управляющих сигналов на приводы манипулятора, не обеспечивая постепенного и плавного формирования этих векторов. Но при одновременной подаче сразу конечных ступенчатых входных сигналов на приводы всех сочленения манипулятора без предварительной требуемой раскрутки соответствующих движителей подводный аппарат с учетом реального динамического запаздывания в этих движителях сразу же будет отброшен от своей исходной позиции, во многих случаях вообще потеряв контакт рабочего инструмента с объектом работ.
Признак «…после формирования исходного вектора силового воздействия со стороны рабочего органа манипулятора на объект работ формируют новую величину и направление этого вектора, который уже учитывает дополнительные составляющие сухого трения и сопротивления движению рабочего органа в начале построенной траектории, указанный вектор также формируют с помощью движителей подводного аппарата путем подачи плавно и синхронно изменяющихся входных сигналов на соответствующие движители и приводы манипулятора, после построения упомянутого вектора в зависимости от выполняемой программы задают скорость перемещения рабочего органа манипулятора по ранее сформированной траектории и начинают это перемещение,…» позволяет обеспечить движение рабочего органа манипулятора по сформированной траектории с требуемым в зависимости от технологической операции силовым воздействием на поверхность объекта работ с учетом силы сухого трения и другого сопротивления движению рабочего органа по обрабатываемой поверхности. В отличие от использованного в прототипе метода задания желаемого силового воздействия на объект работ в процессе движения рабочего органа манипулятора по сформированной траектории учитывают силы сухого трения и иного сопротивления движению этого органа при формировании тяг движителей подводного аппарата.
Признак «…подавая на входы позиционно-силовых систем управления приводами манипулятора соответствующие сигналы, в состав которых входят программные и фактические значения обобщенных координат манипулятора, их скоростей и ускорений, а также программные и фактические значения внешних моментов, обусловленные только силовым взаимодействием рабочего органа манипулятора с поверхностью объекта работ, причем фактические значения указанных внешних моментов определяют с помощью диагностических наблюдателей суммарных значений обобщенных внешних моментов, из которых вычитают составляющие взаимовлияний с реальными значениями масс и моментов инерции звеньев манипулятора, моменты от действия гидростатических сил, моменты вязкого трения, а также моменты, обусловленные наличием уже идентифицированных присоединенных масс и моментов инерции жидкости, …» позволяет обеспечить точное движение рабочего органа манипулятора по сформированной траектории с одновременным созданием точного силового и моментного воздействий на поверхность объекта работ. В отличие от прототипа при формировании обратных связей позиционно-силовых систем управления в новом решение используются идентифицированные фактические значения внешних моментов приводов манипулятора, обусловленных воздействием рабочего органа на объект работ. Без этого просто невозможно реализовать качественное позиционно-силовое управление каждой степенью подвижности манипулятора. Для вычисления этих фактических значений в предлагаемом решении используют определенные с помощью диагностических наблюдателей суммарные значения обобщенных внешних моментов, из которых вычитают составляющие взаимовлияний степеней подвижности манипулятора друг на друга, моменты от действия гидростатических сил, моменты вязкого трения, а также моменты, обусловленные наличием точно идентифицированных текущих значений присоединенных масс и моментов инерции жидкости.
Признак «…во время движения манипулятора по сформированной траектории определяют силовые и моментные воздействия, которые движущийся в водной среде манипулятор оказывает на подводный аппарат в точке его крепления к последнему, эти воздействия рассчитывают с помощью рекуррентного алгоритма, используя идентифицированные величины присоединенных масс и моментов инерции жидкости, моменты вязкого трения, возникающего при перемещениях всех звеньев манипулятора в водной среде, моменты взаимовлияний между всеми степенями подвижности манипулятора, а также силы и моменты, действующие со стороны объекта работ на рабочий орган манипулятора, все указанные воздействия на подводный аппарат синхронно и плавно компенсируют его движителями, при этом ввиду неточностей определения некоторых параметров силовых воздействий дополнительно используют упомянутую систему стабилизации положения и ориентации подводного аппарата в абсолютной системе координат, с помощью которой формируют дополнительные сигналы управления его движителями ...» позволяет обеспечить точную стабилизацию подводного аппарата в процессе выполнения силовых технологических операций. В отличие от использованного в прототипе метода стабилизации подводного аппарата только с помощью его следящих систем, предложенное новое решение за счет специальной идентификации и учета текущих значений присоединенных масс и моментов инерции жидкости, а также точно рассчитываемого вязкого трения и моментов, обусловленных взаимовлияниями между степенями подвижности движущегося в вязкой среде манипулятора, позволяет более точно определить величины силового и моментного воздействий на корпус подводного аппарата со стороны движущегося манипулятора и компенсировать их плавно изменяющимися тягами движителей указанного аппарата, подавая на их входы предельно точно рассчитанные программные сигналы. И только все же появляющиеся, но малые смещения подводного аппарата от его исходного положения компенсируют ранее упомянутыми типовыми системами стабилизации, используя информацию, поступающую с запаздыванием от его систем технического зрения и гироскопических датчиков.
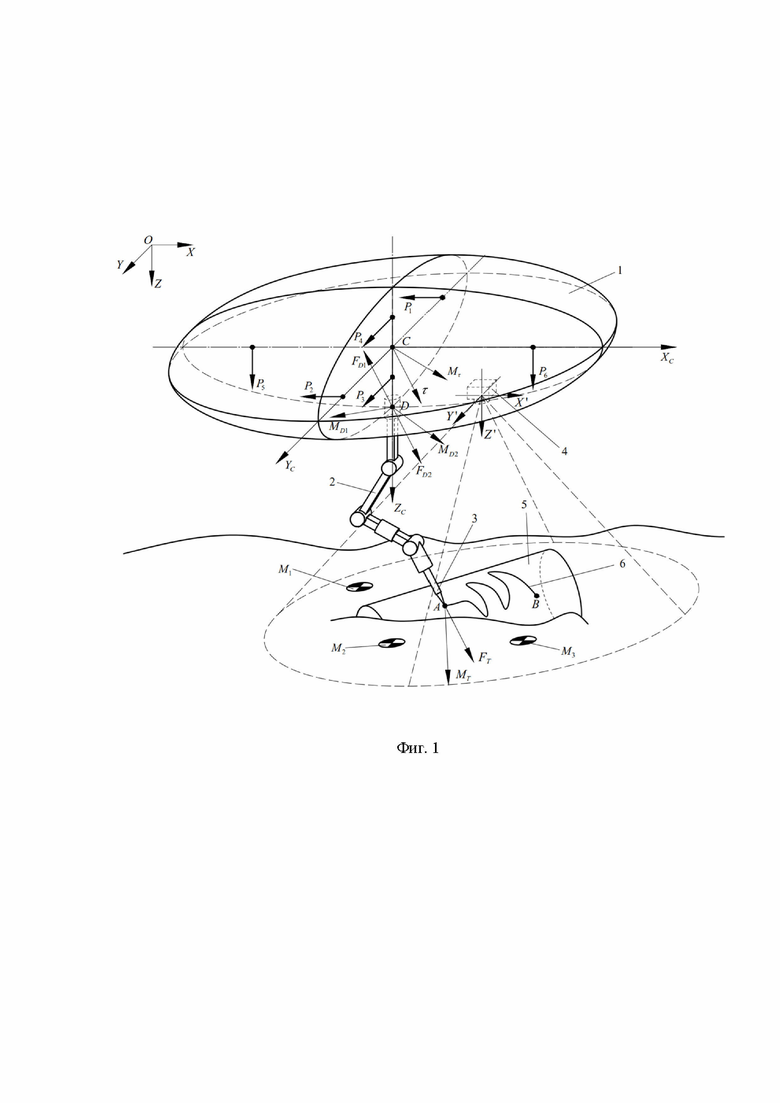
Заявляемое изобретение иллюстрируется чертежом (см. фиг. 1), на котором введены следующие обозначения: 1 – корпус АНПА, управляемый по шести степеням свободы шестью движителями, установленными в его корпусе и имеющими попарно параллельные тяги Pi,  2 – шестистепенной ММ с рабочим органом (РО) 3, закрепленный в нижней части АНПА на его вертикальной центральной оси симметрии; 4 – система технического зрения (СТЗ) с двумя вращательными взаимно перпендикулярными степенями подвижности, закрепленная в нижней части корпуса АНПА в его вертикальной плоскости симметрии; 5 – объект работ (ОР); 6 – очередная траектория движения конца РО, оказывающего силовое воздействие на ОР в процессе этого движения; A, B – начальная и конечная точки траектории 6; M1, M2 и M3 – неподвижные маркеры, находящиеся в поле зрения СТЗ в процессе движения ММ; OXYZ – абсолютная система координат (АСК) (ее ось Z направлена вертикально вниз); C – геометрический центр корпуса АНПА 1; D – точка крепления ММ 2 к корпусу АНПА 1;
2 – шестистепенной ММ с рабочим органом (РО) 3, закрепленный в нижней части АНПА на его вертикальной центральной оси симметрии; 4 – система технического зрения (СТЗ) с двумя вращательными взаимно перпендикулярными степенями подвижности, закрепленная в нижней части корпуса АНПА в его вертикальной плоскости симметрии; 5 – объект работ (ОР); 6 – очередная траектория движения конца РО, оказывающего силовое воздействие на ОР в процессе этого движения; A, B – начальная и конечная точки траектории 6; M1, M2 и M3 – неподвижные маркеры, находящиеся в поле зрения СТЗ в процессе движения ММ; OXYZ – абсолютная система координат (АСК) (ее ось Z направлена вертикально вниз); C – геометрический центр корпуса АНПА 1; D – точка крепления ММ 2 к корпусу АНПА 1;  – система координат (СК), связанная с корпусом АНПА (оси СК совпадают с главными центральными осями симметрии АНПА);
– система координат (СК), связанная с корпусом АНПА (оси СК совпадают с главными центральными осями симметрии АНПА);  – СК, связанная со светочувствительной матрицей СТЗ АНПА (ее ось
– СК, связанная со светочувствительной матрицей СТЗ АНПА (ее ось  направлена вдоль оптической оси СТЗ); τ,
направлена вдоль оптической оси СТЗ); τ,  – соответственно, главный вектор и главный момент тяг, создаваемых всеми движителями, действующие в центре симметрии АНПА;
– соответственно, главный вектор и главный момент тяг, создаваемых всеми движителями, действующие в центре симметрии АНПА;  – соответственно, главный вектор и главный момент сил, действующих на АНПА со стороны ММ в точке
– соответственно, главный вектор и главный момент сил, действующих на АНПА со стороны ММ в точке  – соответственно, главный вектор и главный момент сил, действующих в точке D при формировании движителями АНПА векторов
– соответственно, главный вектор и главный момент сил, действующих в точке D при формировании движителями АНПА векторов  – соответственно, векторы силы и момента, действующие со стороны РО ММ на ОР.
– соответственно, векторы силы и момента, действующие со стороны РО ММ на ОР.
Заявленный способ реализуется следующим образом. Для обеспечения точного выполнения контактных (силовых) операций под водой АНПА 1 имеет компоновку движителей, которая обеспечивает его управление сразу по всем шести степеням его свободы. Эта компоновка показана на фиг. 1, где на каждой оси СК  симметрично располагают по паре движителей, силы тяги которых направлены перпендикулярно соответствующим осям этой СК. Для обеспечения большей устойчивости АНПА точка крепления основания ММ 2 располагается на оси
симметрично располагают по паре движителей, силы тяги которых направлены перпендикулярно соответствующим осям этой СК. Для обеспечения большей устойчивости АНПА точка крепления основания ММ 2 располагается на оси  под центром величины C его корпуса. Внешний корпус АНПА 1 выполняют симметричным относительно его главной вертикальной оси в виде эллипсоида, сплющенного вдоль этой оси, причем проекция этого корпуса на плоскость, проходящую через две другие главные оси симметрии, имеет форму круга. Кинематическая схема ММ 2 также имеет шесть степеней свободы (подвижности), три из которых – переносные и три – ориентирующие, давая возможность его РО 3 обеспечивать любую пространственную ориентацию векторов силового
под центром величины C его корпуса. Внешний корпус АНПА 1 выполняют симметричным относительно его главной вертикальной оси в виде эллипсоида, сплющенного вдоль этой оси, причем проекция этого корпуса на плоскость, проходящую через две другие главные оси симметрии, имеет форму круга. Кинематическая схема ММ 2 также имеет шесть степеней свободы (подвижности), три из которых – переносные и три – ориентирующие, давая возможность его РО 3 обеспечивать любую пространственную ориентацию векторов силового  и моментного
и моментного  воздействий на ОР 5 в его рабочей зоне.
воздействий на ОР 5 в его рабочей зоне.
Перед началом любых контактных (силовых) операций осуществляют идентификацию присоединяемых к движущимся звеньям манипулятора масс и моментов инерции окружающей жидкости, но, поскольку звенья ориентирующих степеней подвижности ММ всегда имеют малые длины, то эти присоединенные массы и моменты инерции жидкости определяют только в его двух главных движущихся звеньях ММ 2. Для этого корпус АНПА 1 неподвижно фиксируют в водной среде, а для его ММ 2 задают движение по тестовым траекториям, причем эти траектории формируют так, чтобы одновременно изменялись все обобщенные координаты переносных степеней подвижности ММ 2. При движении по указанным траекториям на выходные валы электроприводов каждой из трех переносных степеней подвижности ММ 2 действуют обобщенные внешние моменты, обусловленные только эффектами взаимовлияния между двумя основными звеньями ММ, а также гидростатические и гидродинамические силы сопротивления его движению, включая вязкие трения, а также присоединенные массы и моменты инерции окружающей жидкости. То есть в этих обобщенных внешних моментах отсутствуют составляющие, обусловленные силовым взаимодействием РО 3 ММ 2 с ОР 5.
Величины обобщенных внешних моментов, а также скорости и ускорения изменения обобщенных координат ММ 2 определяют в режиме реального времени с помощью диагностических наблюдателей (Жирабок А.Н., Зуев А.В., Филаретов В.Ф., Шумский А.Е. Идентификация дефектов в нелинейных системах на основе скользящих наблюдателей с ослабленными условиями существования // Известия РАН. Теория и системы управления. – 2022. – № 3.– С. 21-30), учитывая динамические особенности исполнительных электроприводов. Из полученных обобщенных моментов вычитают составляющие взаимовлияний переносных степеней подвижности друг на друга с учетом масс и моментов инерции только двух указанных звеньев ММ, рассчитанные аналитически (Шахинпур М. Курс робототехники. - М.: Мир. – 1990. – C. 312-333), а также моменты от действия гидростатических сил (они считаются стандартно) и сил вязкого трения. Для расчета моментов вязкого трения каждое из двух указанных звеньев ММ 2 разбивают на конечное число элементарных частей одинаковой длины и рассчитывают известным методом (Филаретов В.Ф., Коноплин А.Ю. Система автоматической стабилизации подводного аппарата в режиме зависания при работающем многозвенном манипуляторе. Часть 1 // Мехатроника, автоматизация, управление. – 2014. – № 6. – С. 53-56) силу вязкого трения, действующую на каждую из этих частей, с учетом значения числа Рейнольдса для всех движущихся частей звена. Оставшуюся часть обобщенного момента в каждой степени подвижности ММ, обусловленную только наличием неизвестных присоединенных масс и моментов инерции жидкости, представляют в аналитическом виде и преобразуют в линейную регрессионную форму за счет группировки неизвестных параметров относительно известных составляющих. При этом присоединенные массы жидкости задают известным способом (Fossen T.I. Guidance and control of oceanic vehicles. – John Willei and Sons. – 1994. – С. 117-121) в матричном виде, учитывающем изменение величины присоединённой массы звена в зависимости от его ориентации к набегающему потоку жидкости. Далее неизвестные значения присоединенных масс и моментов инерции жидкости точно определяют с использованием фильтра Калмана (Ikonen E. Advanced process identification and control / E. Ikonen, K. Najim. – Marsel Dekker Inc. – 2002. – С. 37-45), используя информацию об изменении обобщенных координат ММ 2 и их производных в каждый момент времени движения его РО 3 по тестовым траекториям.
Затем, используя СТЗ 4, до начала выполнения рабочих операций АНПА 1 автоматически перемещают в водной среде так, чтобы интересующие части ОР 5 находились в рабочей области ММ 2. Взаимное расположение не менее трех произвольных маркеров  (в качестве маркеров можно использовать особенности конструкции ОР или рельефы дна) на ОР 5 или на дне вблизи него позволяет обеспечить с помощью СТЗ 4 привязку АНПА (его точку C) к некоторой исходной точке трехмерного водного пространства над ОР 5.
(в качестве маркеров можно использовать особенности конструкции ОР или рельефы дна) на ОР 5 или на дне вблизи него позволяет обеспечить с помощью СТЗ 4 привязку АНПА (его точку C) к некоторой исходной точке трехмерного водного пространства над ОР 5.
После стабилизации точки C АНПА 1 в подводном пространстве с помощью СТЗ 4 формируют 3D-модель ОР 5, для которой в функции времени строят желаемые траектории движения РО 3, представляемые в памяти управляющего контроллера в виде набора последовательно расположенных точек или в виде аналитического описания сплайнами, с его требуемой ориентацией в АСК, а также с направлением и величиной силового воздействия (или момента) на ОР 5 в каждой точке этих траекторий, которые должны располагаться в рабочей зоне ММ 2 и в поле зрения СТЗ 4 с подвижной оптической осью. Затем для каждой точки траекторий 6 также в функции времени, решая на управляющем контроллере типовые обратные задачи кинематики (ОЗК) (Fu K., Gonzales R. C., Lee C. S. G. Robotics: control, sensing, vision and intelligence // McGraw Hill. – 1987. – P. 53-75) для известной конструкции ММ 2, определяют и запоминают в памяти управляющего контроллера желаемые законы изменения во времени всех обобщенных координат этого ММ 2 для каждой траектории движения его РО 3.
Далее, зная текущее расположение точки C и точки A (с использованием показаний СТЗ 4) в АСК, а также исходное расположение ММ 2 в связанной СК  после решения ОЗК для этого ММ, определяют законы изменения во времени всех его обобщенных координат при переводе РО 3 ММ 2 из его исходного положения в точку A траектории 6 и затем подают уже определенные законы изменения всех обобщенных координат на входы приводов соответствующих степеней подвижности ММ 2 в функции времени, обеспечивая перевод его РО 3 из исходного положения до касания ОР 5 в точке A. Во время этого перевода, непрерывно в реальном масштабе зрения решая обратную задачу динамики (ОЗД) для ММ 2 по известному рекуррентному алгоритму (Филаретов В.Ф., Коноплин А.Ю. Система автоматической стабилизации подводного аппарата в режиме зависания при работающем многозвенном манипуляторе. Часть 1 // Мехатроника, автоматизация, управление. – 2014. – № 6. – С. 53-56) с учетом ранее идентифицированных присоединенных масс и моментов инерции жидкости, определяют плавно изменяющиеся силовое
после решения ОЗК для этого ММ, определяют законы изменения во времени всех его обобщенных координат при переводе РО 3 ММ 2 из его исходного положения в точку A траектории 6 и затем подают уже определенные законы изменения всех обобщенных координат на входы приводов соответствующих степеней подвижности ММ 2 в функции времени, обеспечивая перевод его РО 3 из исходного положения до касания ОР 5 в точке A. Во время этого перевода, непрерывно в реальном масштабе зрения решая обратную задачу динамики (ОЗД) для ММ 2 по известному рекуррентному алгоритму (Филаретов В.Ф., Коноплин А.Ю. Система автоматической стабилизации подводного аппарата в режиме зависания при работающем многозвенном манипуляторе. Часть 1 // Мехатроника, автоматизация, управление. – 2014. – № 6. – С. 53-56) с учетом ранее идентифицированных присоединенных масс и моментов инерции жидкости, определяют плавно изменяющиеся силовое  и моментное
и моментное  воздействия на АНПА 1 со стороны перемещающегося в вязкой среде ММ 2. Эти воздействия автоматически компенсируют плавными изменениями тяг соответствующих движителей
воздействия на АНПА 1 со стороны перемещающегося в вязкой среде ММ 2. Эти воздействия автоматически компенсируют плавными изменениями тяг соответствующих движителей  АНПА 1, которые формируют, подавая соответствующие рассчитываемые сигналы на их входы. Оставшиеся неточности отработки движителями смещений точки C АНПА 1 от ее исходной позиции в пространстве и от горизонтального расположения осей
АНПА 1, которые формируют, подавая соответствующие рассчитываемые сигналы на их входы. Оставшиеся неточности отработки движителями смещений точки C АНПА 1 от ее исходной позиции в пространстве и от горизонтального расположения осей  обусловленных воздействиями
обусловленных воздействиями  со стороны движущегося ММ 2, определяют и дополнительно компенсируют с помощью имеющихся следящих систем стабилизации АНПА 1 при наличии дополнительной информации, получаемой от его бортовой навигационной системы и от СТЗ 4, которая фиксирует смещения точки C АНПА 1 относительно маркеров
со стороны движущегося ММ 2, определяют и дополнительно компенсируют с помощью имеющихся следящих систем стабилизации АНПА 1 при наличии дополнительной информации, получаемой от его бортовой навигационной системы и от СТЗ 4, которая фиксирует смещения точки C АНПА 1 относительно маркеров 
Факт выявления контакта РО 3 с ОР 5 в точке A обеспечивают типовыми тактильными датчиками, устанавливаемым в месте крепления РО 3 к последнему звену ММ 2, или иными известными средствами. После выявления этого контакта и окончательного восстановления исходной позиции точки C АНПА в пространстве над ОР 5 с помощью следящих систем стабилизации АНПА, используя известные рекуррентные соотношения (Филаретов В.Ф., Зуев А.В., Губанков А.С. Управление манипуляторами при выполнении различных технологических операций. – М.: Наука, 2018. – с. 99-102) с учетом текущей конфигурации ММ определяют желаемые значения внешних моментов во всех сочленениях ММ и желаемые тяги движителей АНПА, которые в совокупности создают в точке A исходные желаемые и возможно переменные по величине и направлению силу  и (или) момент
и (или) момент  со стороны РО 3 на ОР 5.
со стороны РО 3 на ОР 5.
Затем на входы соответствующих движителей АНПА скоординировано подают программные сигналы, изменяющиеся плавно и равномерно в заданном временном интервале от нуля до их расчетных величин, которые в точке C формируют  в точке D –
в точке D –  а в точке A при текущей конфигурации ММ 2 – требуемые исходные значения и . Величина указанного временного интервала зависит от величин , и динамических свойств движителей АНПА. Одновременно с подачей сигналов на движители АНПА в том же временном интервале путем типового решения ОЗД на вход каждого следящего привода соответствующей степени подвижности ММ 2 с учетом непрерывно вычисляемых для текущего момента времени , также равномерно во времени подают соответствующие программные сигналы, которые, обеспечивая равномерные нарастания внешних моментных воздействий на выходах всех приводов, создают равномерное реальное нарастание силовых и моментных воздействий , на ОР 5, не позволяя при этом ММ 2 изменять свою исходную (в момент первого контакта его РО 3 с ОР 5) конфигурацию. При этом сам АНПА 1, опирающийся на манипулятор сверху и представляющий собой неустойчивый перевернутый маятник, сохраняет свое устойчивое положение в пространстве (стабильные положение точки C и ориентацию осей
а в точке A при текущей конфигурации ММ 2 – требуемые исходные значения и . Величина указанного временного интервала зависит от величин , и динамических свойств движителей АНПА. Одновременно с подачей сигналов на движители АНПА в том же временном интервале путем типового решения ОЗД на вход каждого следящего привода соответствующей степени подвижности ММ 2 с учетом непрерывно вычисляемых для текущего момента времени , также равномерно во времени подают соответствующие программные сигналы, которые, обеспечивая равномерные нарастания внешних моментных воздействий на выходах всех приводов, создают равномерное реальное нарастание силовых и моментных воздействий , на ОР 5, не позволяя при этом ММ 2 изменять свою исходную (в момент первого контакта его РО 3 с ОР 5) конфигурацию. При этом сам АНПА 1, опирающийся на манипулятор сверху и представляющий собой неустойчивый перевернутый маятник, сохраняет свое устойчивое положение в пространстве (стабильные положение точки C и ориентацию осей  даже при некоторых погрешностях в определении создаваемых силовых и моментных воздействий. Это обеспечивают путем создания незначительных дополнительных тяг движителей АНПА, которые формируют следящими системами его стабилизации, устраняя появление со временем даже малых линейных смещений точки C и ориентаций осей
даже при некоторых погрешностях в определении создаваемых силовых и моментных воздействий. Это обеспечивают путем создания незначительных дополнительных тяг движителей АНПА, которые формируют следящими системами его стабилизации, устраняя появление со временем даже малых линейных смещений точки C и ориентаций осей  от их исходных позиций в АСК. Эти малые смещения также определяют с помощью СТЗ 4 и трех неподвижных маркеров М1-М3.
от их исходных позиций в АСК. Эти малые смещения также определяют с помощью СТЗ 4 и трех неподвижных маркеров М1-М3.
Если РО 3 выполняет, например, только взятие проб донного грунта, то по достижению FT значения, необходимого для ввода РО в грунт, начинают процесс его заглубления с помощью ММ 2, который при неподвижном АНПА 1 обеспечивают системой управления этим ММ. С помощью указанной системы при формировании соответствующих законов управления всеми приводами всех степеней подвижности ММ 2, непрерывно используя решения ОЗК и ОЗД ММ с учетом всех сил взаимовлияния между всеми степенями его подвижности друг на друга, сил вязкого трения, а также присоединенных масс и моментов инерции жидкости, а также текущие показания СТЗ 4, обеспечивают требуемое линейное движение РО 3 ММ 2 вглубь дна под заданным углом к нему, а затем в обратном порядке вынимают пробоотборник из грунта.
Если РО 3 требуется смещать с заданными FT и MT (возможно переменными), по сформированной ранее траектории 6 по поверхности ОР 5 от точки A и до точки B, то к исходному вектору силы FT добавляют еще векторы сил сухого трения и силового воздействия на объект вдоль траектории 6. В результате формируют новые векторы сил и моментов (FT и MT). Эти новые векторы начинают использовать при переводе РО 3 из исходной точки A в очередную точку на траектории 6. При этом для получения новых векторов FT и MT при текущей конфигурации ММ 2 по указанным ранее рекуррентным соотношениям рассчитывают новые векторы FD2 и MD2, а затем и тяги всех шести движителей АНПА 1. При этом также формируют новые значения программных сигналов, подаваемых на все приводы ММ 2 для создания внешних моментов на приводах всех его степеней подвижности, соответствующих величинам полученных новых значений FT, MT.
Перед началом рабочего движения ММ 2 в зависимости от выполняемой программы задают постоянную или переменную скорость перемещения конца его РО 3 по траектории 6 от точки A до точки B с уже определенным (возможно переменным) силовым FT и моментным MT воздействием этого РО 3 на ОР 5. Сформированные для каждой степени подвижности ММ 2 программные значения обобщенных координат, их скоростей и ускорений, а также внешних моментов подают на входы позиционно-силовых систем управления (Филаретов В.Ф., Зуев А.В., Губанков А.С. Управление манипуляторами при выполнении различных технологических операций. – М.: Наука, 2018. – с. 93-99) всеми электроприводами ММ 2, которые обеспечивают одновременную минимизацию ошибок как по положению выходного вала редуктора каждого электропривода ММ 2, так и по развиваемому внешнему моменту. Это обеспечивает точное движение РО 3 по траектории 6 с точным силовым воздействием на ОР 5. Во время этого движения для определения фактических значений внешних моментов приводов ММ, обусловленных воздействием РО 3 на ОР 5 и необходимых для реализации обратных связей указанных позиционно-силовых систем, используют вычисленные с помощью диагностических наблюдателей суммарные значения обобщенных внешних моментов, из которых, как отмечалось ранее, вычитают составляющие взаимовлияний с реальными значениями масс и моментов инерции звеньев ММ, моменты от действия гидростатических сил, моменты вязкого трения, а также моменты, обусловленные наличием идентифицированных присоединенных масс и моментов инерции жидкости.
Во время точного движения ММ 2 по траектории 6 определяют силовые и моментные воздействия FD1, MD1, которые движущийся в водной среде ММ оказывает на АНПА 1 в точке его крепления к последнему. Эти воздействия рассчитывают с помощью ранее указанного рекуррентного алгоритма решения ОЗД, но в этом алгоритме уже используют идентифицированные величины присоединенных масс и моментов инерции жидкости, а также моменты вязкого трения, возникающего при перемещениях всех звеньев ММ 2 в водной среде, моменты, обусловленные взаимовлияниями между всеми звеньями и степенями подвижности ММ, и значения векторов силы - FT и момента - MT, действующих со стороны ОР 5 на РО 3 ММ.
Одновременно с движением РО 3 ММ 2 по траектории 6 обеспечивают не только описанную выше целевую компенсацию FD1, MD1 движителями АНПА 1, которая реально может быть и не совсем точной, но и используют дополнительную стабилизацию положения и ориентации АНПА 1 в АСК с помощью установленных в нем типовых следящих систем управления, которые за счет введения с помощью СТЗ 4 отрицательных обратных связей по всем его степеням свободы позволяет минимизировать все погрешности, а также неточности определения и отработки движителями АНПА реальных FD1, MD1.
Изобретение относится к робототехнике и может быть использовано при создании систем управления автономными необитаемыми подводными аппаратами (АНПА) с многостепенными манипуляторами (ММ). Для позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором в режиме его зависания и предварительной стабилизации перед началом выполнения силовых операций с объектом работ осуществляют в дальнейшем, учитывая линейные смещения подводного аппарата в пространстве, определяемые системой технического зрения, и его угловые смещения, определяемые бортовыми гироскопическими датчиками, задание переменных желаемых величин и направлений силовых воздействий, оказываемых рабочим органом манипулятора, основание которого закреплено под центром величины подводного аппарата. На объект работ в каждой точке траектории движения рабочего органа манипулятора, формируют с помощью 3D-модели этого объекта работ, при этом на входы соответствующих движителей подводного аппарата подают сигналы управления, уменьшающие его отклонения от исходного положения при перемещениях манипулятора в вязкой среде. Достигается неизменно точное автоматическое выполнение манипулятором АНПА различных технологических операций, требующих точного силового взаимодействия рабочего органа (РО) ММ с подводными объектами. 1 ил.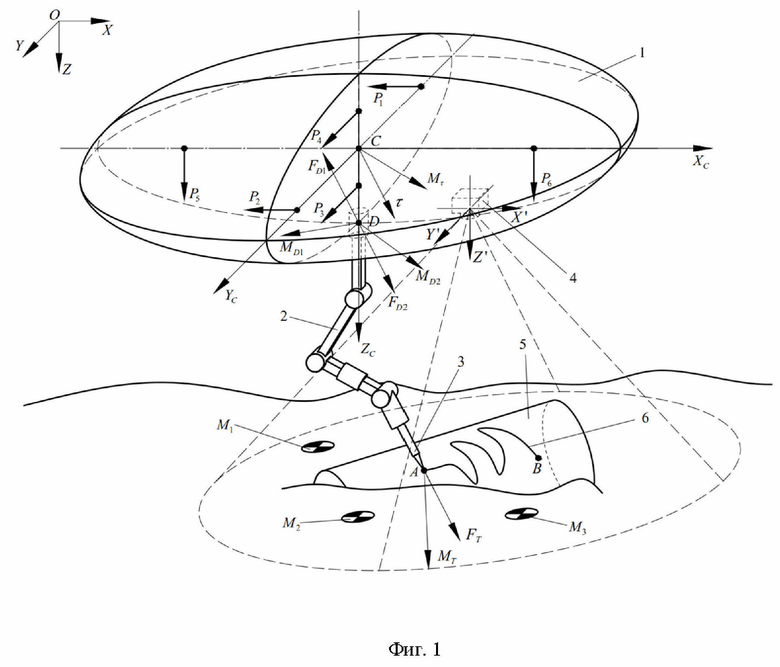
Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором в режиме его зависания и предварительной стабилизации перед началом выполнения силовых операций с объектом работ, которые осуществляют в дальнейшем, учитывая линейные смещения подводного аппарата в пространстве, определяемые системой технического зрения, и его угловые смещения, определяемые бортовыми гироскопическими датчиками, заключающийся в задании переменных желаемых величин и направлений силовых воздействий, оказываемых рабочим органом манипулятора, основание которого закреплено под центром величины подводного аппарата, на объект работ в каждой точке траектории движения его рабочего органа, которую формируют с помощью 3D-модели этого объекта работ, при этом на входы соответствующих движителей подводного аппарата подают сигналы управления, уменьшающие его отклонения от исходного положения при перемещениях манипулятора в вязкой среде, отличающийся тем, что внешний корпус подводного аппарата выполняют симметричным относительно его главной вертикальной оси в виде эллипсоида, сплющенного вдоль этой оси, причем проекция этого корпуса на плоскость, проходящую через две другие главные оси симметрии, имеет форму круга, а шесть движителей подводного аппарата закрепляют попарно на его главных осях симметрии на одинаковом расстоянии относительно его центра величины так, чтобы оси их тяг попарно всегда были перпендикулярны осям тяг остальных пар движителей и обеспечивали подводному аппарату шесть степеней свободы, кинематическая схема манипулятора подводного аппарата также имеет шесть степеней свободы, три из которых – переносные и три – ориентирующие, она дает возможность его рабочему органу обеспечивать любую пространственную ориентацию векторов силового и моментного воздействия на объекты работ, до начала любых рабочих операций во время тестовых движений манипулятора с неподвижно зафиксированным в пространстве корпусом подводного аппарата с помощью фильтра Калмана осуществляют идентификацию масс и моментов инерции окружающей жидкости, присоединяемых к двум главным звеньям переносных степеней подвижности манипулятора, после подхода подводного аппарата и его стабилизации вблизи объекта работ, выявив с помощью системы технического зрения и трех маркеров текущие пространственные расположения подводного аппарата и начальной точки сформированной траектории, а также зная исходное расположение манипулятора, после решения обратной задачи кинематики определяют законы изменения во времени всех его обобщенных координат, после чего переводят рабочий орган манипулятора из исходного положения в начальную точку траектории, синхронно в функции времени подавая сигналы, соответствующие указанным законам изменения обобщенных координат, на входы следящих приводов всех степеней подвижности манипулятора, обеспечивая плавный перевод его рабочего органа из исходного положения до контакта с объектом в начальной точке сформированной траектории, одновременно с этим по известному рекуррентному алгоритму решения обратной задачи динамики с учетом ранее идентифицированных присоединенных масс и моментов инерции жидкости в реальном масштабе времени рассчитывают силовое и моментное воздействия на подводный аппарат со стороны этого движущегося в водной среде манипулятора, которые компенсируют плавным изменением тяг его соответствующих движителей, стабилизируя подводный аппарат в заданной точке пространства, после выявления типовым тактильным датчиком контакта рабочего органа манипулятора с объектом работ, используя рекуррентные соотношения с учетом текущей конфигурации манипулятора, определяют законы изменения во времени желаемых тяг соответствующих движителей подводного аппарата и желаемых внешних моментов во всех сочленениях манипулятора, с помощью которых также в функции времени формируют желаемые значения входных сигналов на соответствующие движители подводного аппарата и приводы манипулятора, синхронная реализация этих сигналов обеспечивает плавное нарастание от нуля и до конечного значения программного силового и моментного воздействий со стороны рабочего органа на объект работ в начале траектории, при этом сохраняют неизменной исходную текущую конфигурацию манипулятора, одновременно обеспечивая более точную стабилизацию положения и ориентации подводного аппарата в абсолютной системе координат за счет компенсации его движителями плавно нарастающих силовых и моментных воздействий со стороны манипулятора, реально возникающие неточности указанной программной компенсации ликвидируют с помощью типовой системы стабилизации, использующей информацию, получаемую от системы технического зрения, и отрицательные обратные связи по всем степеням свободы подводного аппарата, применяя эту систему, создают дополнительные сигналы управления соответствующими движителями, которые удерживают подводный аппарат в его исходной точке пространства с исходной ориентацией, после формирования исходного вектора силового воздействия со стороны рабочего органа манипулятора на объект работ формируют новую величину и направление этого вектора, который уже учитывает дополнительные составляющие сухого трения и сопротивления движению рабочего органа в начале построенной траектории, указанный вектор также формируют с помощью движителей подводного аппарата путем подачи плавно и синхронно изменяющихся входных сигналов на соответствующие движители и приводы манипулятора, после построения упомянутого вектора в зависимости от выполняемой программы задают скорость перемещения рабочего органа манипулятора по ранее сформированной траектории и начинают это перемещение, подавая на входы позиционно-силовых систем управления приводами манипулятора соответствующие сигналы, в состав которых входят программные и фактические значения обобщенных координат манипулятора, их скоростей и ускорений, а также программные и фактические значения внешних моментов, обусловленные только силовым взаимодействием рабочего органа манипулятора с поверхностью объекта работ, причем фактические значения указанных внешних моментов определяют с помощью диагностических наблюдателей суммарных значений обобщенных внешних моментов, из которых вычитают составляющие взаимовлияний с реальными значениями масс и моментов инерции звеньев манипулятора, моменты от действия гидростатических сил, моменты вязкого трения, а также моменты, обусловленные наличием уже идентифицированных присоединенных масс и моментов инерции жидкости, во время движения манипулятора по сформированной траектории определяют силовые и моментные воздействия, которые движущийся в водной среде манипулятор оказывает на подводный аппарат в точке его крепления к последнему, эти воздействия рассчитывают с помощью рекуррентного алгоритма, используя идентифицированные величины присоединенных масс и моментов инерции жидкости, моменты вязкого трения, возникающего при перемещениях всех звеньев манипулятора в водной среде, моменты взаимовлияний между всеми степенями подвижности манипулятора, а также силы и моменты, действующие со стороны объекта работ на рабочий орган манипулятора, все указанные воздействия на подводный аппарат синхронно и плавно компенсируют его движителями, при этом ввиду неточностей определения некоторых параметров силовых воздействий дополнительно используют упомянутую систему стабилизации положения и ориентации подводного аппарата в абсолютной системе координат, с помощью которой формируют дополнительные сигналы управления его движителями.
| Способ позиционно-силового управления подводным аппаратом с многозвенным манипулятором для выполнения контактных манипуляционных операций с подводными объектами | 2022 |
|
RU2789510C1 |
| US 20080275594 A1, 06.11.2008 | |||
| CN 102029611 A, 27.04.2011 | |||
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ МАНИПУЛЯТОРОМ В РЕЖИМЕ ЗАВИСАНИЯ ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2475799C2 |

