Изобретение относится к робототехнике и может быть использовано при создании систем управления автономными необитаемыми подводными аппаратами (АНПА) с многостепенными манипуляторами (ММ).
Известен способ управления движением многостепенного антропоморфного манипулятора АНПА, заключающийся в подаче управляющих воздействий на входы приводов манипулятора для приведения рабочего инструмента (РИ) ММ в заданное положение с заданной скоростью за заданное время, рассчитываемых в форме алгебраических и трансцендентных выражений на основе упрощенных динамических моделей электроприводов и динамической модели ММ, сформулированной на основе кинематической модели манипулятора, построенной с использованием подхода Денавита-Хартенберга, причем динамическую модель ММ для достижения его конечного состояния преобразуют в систему дифференциальных уравнений, определяющих углы поворота звеньев ММ вокруг их продольных и поперечных осей, правые части которой содержат только искомые управления. (Балабанов А.Н., Безуглая А.Е., Шушляпин Е.А. Управление манипулятором подводного робота // Информатика и автоматизация. - 2021. - Т. 20. - №. 6. - С. 1307-1332).
Недостатком этого способа является то, что управляющие воздействия, подаваемые на приводы ММ, формируются на основе динамических моделей ММ и этих приводов, которые не учитывают реально существующие силовые и моментные воздействия на подводный аппарат со стороны объекта работ, передающиеся через звенья и сочленения манипулятора в точку крепления ММ к основанию АНПА. Но эти воздействия возникают сразу же после установления силового контакта рабочего инструмента ММ с поверхностью объекта работ при выполнении любой силовой технологической операции. В результате эти воздействия приводят к неконтролируемому смещению АНПА в пространстве.
Кроме того, в процессе выполнения рабочих операций на АНПА могут действовать значительно переменные по величине и направлению силы, обусловленные произвольной турбулентностью водной среды и переменными по величине и направлению подводными течениями, которые также приведут к смещениям аппарата. В результате этих смещений будет потерян контакт с поверхностью объекта работ, и нарушено выполнение заданных технологических операций.
Известен также способ импедансного управления автономным подводным аппаратом, имеющим шесть степеней подвижности, с многостепенным манипулятором, оснащенным многокомпонентным силомоментным датчиком, который расположен в месте крепления РИ ММ, заключающийся в подаче управляющих сигналов на входы приводов ММ и движителей АНПА, которые формируются на основе аналитического описания динамики манипулятора и аппарата как единой системы, полученного с помощью одной из модификаций метода Лагранжа, обеспечивающих одновременное требуемое движение РИ ММ по заданной траектории и требуемое силовое воздействие на объект работ (Cui Y., Podder Т. K., Sarkar N. Impedance control of underwater vehicle-manipulator systems (UVMS) // Proceedings 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human and Environment Friendly Robots with High Intelligence and Emotional Quotients (Cat. No. 99CH36289). - 1999. - Т. 1. - C. 148-153.).
Недостатком этого способа является то, что для формирования обратных связей по силе и моменту, оказываемых РИ ММ на объект работ, используют многокомпонентный силомоментный датчик, закрепленный перед РИ ММ. Однако наличие такого датчика увеличивает вес манипулятора и, как следствие, приводит к большим взаимовлияниям между всеми его степенями подвижности, что в итоге уменьшает точность перемещения РИ ММ. Кроме того, существует сложность реализации требуемого по величине и направлению вектора усилия на обрабатываемую поверхность с использованием сигнала от многокомпонентного силомоментного датчика. Также, при выполнении контактных операций на корпус АНПА могут воздействовать переменные по величине и направлению силы, вызванные турбулентностью водной среды и переменными подводными течениями, что приведет к значительным неконтролируемым смещениям подводного аппарата, потере контакта с поверхностью обрабатываемого объекта и нарушению технологической операции.
Известен также способ позиционно-силового управления подводным аппаратом (ПА) с многозвенным манипулятором для выполнения контактных манипуляционных операций с подводными объектами, при реализации которого на борту ПА устанавливают гироскопические датчики и навигационную систему, определяющие линейное и угловое смещения этого аппарата от его исходного положения при работающем манипуляторе, а на следящие приводы всех степеней подвижности манипулятора подают дополнительные сигналы управления, пропорциональные смещению этого ПА от его исходного положения, которые обеспечивают дополнительное перемещение рабочего органа манипулятора в пространстве и тем самым продолжение его точного движения по заранее заданной желаемой программной траектории независимо от произвольных смещений ПА, отличающийся тем, что дополнительно вычисляют внешние моменты, действующие на выходные валы приводов во всех степенях подвижности манипулятора в результате силового контакта рабочего инструмента этого манипулятора с поверхностью объекта работ, посредством вычитания из величины результирующего внешнего момента, действующего на выходной вал привода каждой степени подвижности манипулятора и измеряемого датчиком или наблюдателем момента нагрузки соответствующего привода, величины момента, обусловленного эффектами взаимовлияния между всеми степенями подвижности манипулятора, а также гидростатическими и гидродинамическими силами сопротивления его движению, включая силы вязкого трения и силы, вызванные присоединенными массами окружающей жидкости, и вычисляемого с помощью аналитических выражений решения обратной задачи динамики для упомянутого подводного манипулятора, затем для конкретной кинематической схемы манипулятора на основе вычисленных величин внешних моментов, действующих на выходные валы приводов во всех степенях подвижности манипулятора в результате силового контакта рабочего инструмента этого манипулятора с поверхностью объекта работ, рассчитывают величину и направление вектора силы, оказываемой рабочим инструментом манипулятора на объект работ, после чего на приводы всех степеней подвижности манипулятора подают сигналы управления, обеспечивающие перемещение рабочего инструмента упомянутого манипулятора в направлении желаемого вектора силы для достижения желаемой величины силового воздействия рабочего инструмента на поверхность объекта работ, одновременно на входы соответствующих движителей ПА подают сигналы, компенсирующие силовые и моментные воздействия на этот аппарат со стороны манипулятора, перемещающегося в вязкой среде и оказывающего силовое воздействие на объект работ, причем сигналы управления движителями ПА формируются в реальном масштабе времени на основе аналитических выражений, определяющих силу и момент, с которыми этот манипулятор действует на ПА, учитывающих вычисляемые величину и направление вектора силы, оказываемой рабочим инструментом манипулятора на объект работ, эффекты взаимовлияния между всеми степенями подвижности манипулятора, а также гидростатические и гидродинамические силы сопротивления его движению, включая силы вязкого трения и силы, вызванные присоединенными массами окружающей жидкости [Коноплин А.Ю., Красавин Н.А., Юрманов А.П., Пятавин П.А. Способ управления подводным манипулятором в режиме зависания подводного аппарата // патент РФ №2789510, Бюл. №4 от 06.02.2023].
Этот способ является наиболее близким к заявляемому изобретению.
Первым важным недостатком является отсутствие в прототипе возможности создания произвольного позиционно-силового управления ММ, который имеет всего четыре степени подвижности. Для задания любого произвольного пространственного вектора силового воздействия на объект необходимо иметь шесть степеней подвижности.
Второй недостаток обусловлен тем, что прототип будет работоспособен только при малых скоростях подводных течений, которые должен полностью компенсировать АНПА с помощью его движителей при одновременном управлении требуемым движением и силовом воздействии ММ на объект работ. При относительно больших течениях сделать это с учетом ограниченной мощности движителей не удастся.
Главным третьим недостатком этого способа является то, что создание желаемого вектора силы со стороны РИ ММ на объект работ за счет одновременной подачи управляющих воздействий на приводы всех сочленений ММ осуществляют в режиме зависания АНПА в заданной точке подводного пространства над объектом работ. В этом режиме оказание любого (и особенно существенного) силового воздействия РИ ММ на объект работ неизбежно приведет к появлению векторов силы и момента, действующих на АНПА в точке крепления к нему ММ, и этот АНПА неизбежно начнет смещаться в водной среде от исходной точки и изменять свою пространственную ориентацию. Это неминуемо произойдет из-за задержек в получении информации о смещении АНПА и изменении его ориентации, поступающей от навигационной системы и гироскопов, а также большой инерционности (динамического запаздывания) самих движителей АНПА. То есть будет нарушена стабилизация АНПА в заданной точке водной среды с требуемой ориентацией и пропадает контакт ММ с объектом работ и его требуемое силовое воздействие на этот объект. Кроме того, в процессе выполнения работ на АНПА могут действовать значительно переменные по величине и направлению силы, обусловленные произвольной турбулентностью водной среды и переменными по величине и направлению подводными течениями, которые также будут приводить к смещению зависшего над объектом работ аппарата и потере контакта его РИ с поверхностью объекта. Попытки восстановления силового контакта ММ с объектом работ за счет изменения его конфигурации при одновременной работе системы стабилизации АНПА по восстановлению его исходного положения и ориентации неизбежно приведут к периодическим ударам рабочих инструментов по этим объектам.
К третьему недостатку прототипа относится и то, что при движении РИ ММ по конкретной траектории для задания желаемого усилия на объект работ в процессе этого движения на входы приводов ММ подают дополнительные сигналы управления, которые формируют с учетом только этого желаемого усилия. Но часть указанного усилия непременно будет тратиться и на преодоление сухого трения скольжения и сопротивления материала по поверхности объекта при движении. В результате величина и направление вектора этой силы будут значительно отличаться от желаемых или РИ в принципе не будет двигаться по указанной траектории.
Четвертым существенным недостатком прототипа является то, что определение составляющей общего внешнего момента на выходном валу каждого привода ММ, обусловленных только силовыми воздействиями РИ на объект работ, осуществляется путем вычитания из общего момента, определяемого диагностическими наблюдателями, составляющих, обусловленных гидростатическими и гидродинамическими силами сопротивления движению звеньев, а также эффектами взаимовлияния между всеми степенями подвижности ММ, определяемых с помощью аналитического решения обратной задачи динамики для этого ММ. Но способ задания значений присоединенных к звеньям ММ масс и моментов инерции жидкости, используемых в упомянутом аналитическом решении, в прототипе никак не регламентируется. В итоге неизбежное наличие больших погрешностей в задании предполагаемых значений присоединенных масс и моментов инерции жидкости обязательно приведет к большим ошибкам в определении реальных величин и направлений векторов силовых и моментных воздействий на объект работ со стороны РИ и, соответственно, на АНПА со стороны работающего ММ, а также к большим ошибкам стабилизации АНПА в заданной точке пространства. Это также будет неизбежно приводить к постоянным потерям контактов между объектом работ и РИ ММ и периодическим ударам этого инструмента по указанному объекту, которые могут привести к поломкам рабочего инструмента или объекта работ.
Не указано в прототипе и то, каким образом будет обеспечено позиционно-силовое управление каждым приводом ММ (пятый существенный недостаток), поскольку это управление приводом с помощью одного входного воздействия в каждый момент времени требует его специального разделения на две постоянно изменяющиеся по определенным законам части: одна для управления текущим вращением вала привода, а вторая - для задания требуемого текущего внешнего момента.
Задачей заявляемого изобретения является устранение всех указанных выше недостатков, т.е. точное автоматическое выполнение АНПА с ММ требуемых силовых технологических операций по всей поверхности объектов работ в водной среде.
Технический результат изобретения заключается в неизменно точном автоматическом выполнении манипулятором АНПА различных технологических операций, требующих точного силового взаимодействия РИ ММ с подводными объектами во время выполнения этих операций, когда необходимо обеспечить точное перемещение РИ по любым пространственным траекториям в рабочей зоне ММ с одновременным созданием заданного по величине и направлению силового воздействия со стороны РИ на указанные объекты без возможных потерь контактов с этими объектами при любых величинах подводных течений.
В заявке это предложено достичь путем жесткой фиксации АНПА на объекте работ с помощью типовых устройств крепления АНПА к объекту и создания после контакта РИ ММ с поверхностью объекта требуемых по величине и направлению силовых и моментных воздействий на подводный объект при одновременном точном программном движении ММ в пространстве за счет сигналов, подаваемых на входы соответствующих приводов ММ, которые учитывают внешние силовые и моментные воздействия, обусловленные взаимодействием этого ММ с объектами работ и вязкой средой.
Поставленная задача решается тем, что в заявляемом способе позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором, в процессе реализации которого вычисляют внешние моменты, действующие на выходные валы приводов всех степеней подвижности манипулятора при силовых контактах его рабочего инструмента с поверхностью объекта работ, посредством вычитания из величины результирующего внешнего момента, действующего на выходной вал привода каждой степени подвижности манипулятора и измеряемого наблюдателем момента нагрузки соответствующего привода, величины момента, вычисляемого с помощью аналитических выражений для решения обратной задачи динамики упомянутого манипулятора и обусловленного эффектами взаимовлияния между всеми степенями его подвижности, а также гидростатическими и гидродинамическими силами сопротивления его движению, включая силы вязкого трения и силы, обусловленные наличием присоединенных масс окружающей жидкости, кинематическая схема используемого манипулятора имеет шесть степеней свободны, три из которых - переносные и три - ориентирующие, обеспечивающие любую пространственную ориентацию вектора силового и моментного воздействия на объект работ, а подводный аппарат дополнительно оснащают магнитными устройствами крепления или присосками, с помощью которых до начала рабочих операций аппарат жестко фиксируют вблизи обрабатываемого участка, наблюдаемого системой технического зрения, непосредственно на объекте работ или на посадочной платформе, после фиксации аппарата во время тестовых движений манипулятора, с помощью фильтра Калмана определяют значения масс и моментов инерции окружающей жидкости, присоединяемой к двум главным звеньям переносных степеней подвижности манипулятора, затем с помощью систем технического зрения формируют 3D-модель объекта работ, с использованием которой в абсолютной системе координат строят требуемые траектории движения рабочего инструмента манипулятора, в каждой точке которых задают величины и направления его силового воздействия на объект работ в соответствии с выполняемыми технологическими операциями и запоминают все это в памяти управляющего процессора, затем, зная исходные конфигурации манипулятора и положения начальных точек построенных траекторий, а также решая обратные задачи кинематики, определяют законы изменения во времени всех обобщенных координат манипулятора и переводят его рабочий инструмент из исходного положения до контакта с объектом в начальной точке конкретной траектории, подавая соответствующие сигналы управления на входы следящих приводов всех его степеней подвижности, после выявления тактильным датчиком контакта рабочего инструмента с объектом работ, используя рекуррентные соотношения, с учетом текущей конфигурации манипулятора определяют величины внешних моментов во всех его сочленениях, на основе которых формируют входные сигналы на его приводы, обеспечивая создание исходного полного вектора силового воздействия со стороны его рабочего инструмента на объект работ, который учитывает составляющие сухого трения и сопротивления движению рабочего инструмента вдоль построенных траекторий, и в зависимости от выполняемой программы задают скорость перемещения рабочего инструмента манипулятора по ранее сформированной траектории, затем на входы позиционно-силовых систем управления приводами манипулятора подают соответствующие заданным скоростям и векторам силового воздействия сигналы, в состав которых входят программные и реальные значения обобщенных координат манипулятора, их скоростей и ускорений, а также соответствующих внешних моментов.
Сопоставленный анализ признаков заявляемого способа с признаками аналогов и прототипа свидетельствует о соответствии этого способа критерию "новизна".
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак «…кинематическая схема используемого манипулятора имеет шесть степеней свободны, три из которых - переносные и три - ориентирующие, обеспечивающие любую пространственную ориентацию вектора силового и моментного воздействия на объект работ,…» в отличие от используемого в прототипе четырехстепенного манипулятора, позволяет обеспечить любую пространственную ориентацию векторов силового и моментного воздействия рабочего инструмента манипулятора на объект работ в пределах его рабочей зоны за счет использования кинематической схемы с тремя переносными и тремя ориентирующими степенями подвижности.
Признак «…а подводный аппарат дополнительно оснащают магнитными устройствами крепления или присосками, с помощью которых до начала рабочих операций аппарат жестко фиксируют вблизи обрабатываемого участка, наблюдаемого системой технического зрения, непосредственно на объекте работ или на посадочной платформе,…» позволяет исключить смещение корпуса аппарата и основания манипулятора в процессе выполнения рабочих операций. В отличие от прототипа, в котором подводный аппарат стабилизируют вблизи объекта работ, в предложенном решении за счет жесткой фиксации корпуса с помощью специальных устройств крепления или присосок обеспечивают неподвижность основания манипулятора независимо от силового и моментного воздействий, которые движущийся в вязкой среде и выполняющий контактные операции манипулятор оказывает на подводный аппарат, а также от турбулентности водной среды и переменных подводных течений.
Признак «…после фиксации аппарата во время тестовых движений манипулятора, с помощью фильтра Калмана определяют значения масс и моментов инерции окружающей жидкости, присоединяемой к двум главным звеньям переносных степеней подвижности манипулятора,…» позволяет точно определять величины присоединяемых к главным звеньям переносных степеней подвижности манипулятора масс и моментов инерции окружающей жидкости. В отличие от применения в прототипе усредненных значений присоединяемых масс и моментов инерции жидкости в новом решении предложена и использована точная идентификация этих значений непосредственно перед началом рабочих операций. Использование указанных значений позволяет с гораздо меньшей погрешностью формировать величины суммарных моментов в каждой степени подвижности манипулятора, которые необходимы для создания требуемого точного движения рабочего инструмента манипулятора по заданной траектории и одновременно требуемого силового воздействия на объект работ, а также определять реальные величины только тех составляющих суммарных моментов, которые обусловлены созданием текущего силового воздействия на объект работ, и формировать на их основе обратные связи для позиционно-силовых систем управления приводами манипулятора.
Признак «…затем с помощью систем технического зрения формируют 3D-модель объекта работ, с использованием которой в абсолютной системе координат строят требуемые траектории движения рабочего инструмента манипулятора, в каждой точке которых задают величины и направления его силового воздействия на объект работ в соответствии с выполняемыми технологическими операциями и запоминают все это в памяти управляющего процессора,…» позволяет с помощью известных методов получить и запомнить в памяти управляющего контроллера аппарата требуемые траектории движения рабочего инструмента по поверхности объекта работ с учетом его деформации, обрастания, заиливания и других изменений его исходной формы, а также вектора силового и моментного воздействия на объект работ заданной величины и направления в каждой точки этих траекторий. В отличие от применения в прототипе заранее, то есть на этапе подготовки к миссии, заданной траектории движения рабочего инструмента манипулятора с определенным силовым воздействием на протяжении всей этой траектории, в новом решении использованы траектории, которые зависят от текущей формы объекта работ и обеспечивают постоянный контакт с поверхностью объекта в любой их точке, а также для этих точек задаются собственные вектора силового воздействия на объект любых заданных величины и направления, в том числе и переменных.
Признак «…затем, зная исходные конфигурации манипулятора и положения начальных точек построенных траекторий, а также решая обратные задачи кинематики, определяют законы изменения во времени всех обобщенных координат манипулятора и переводят его рабочий инструмент из исходного положения до контакта с объектом в начальной точке конкретной траектории, подавая соответствующие сигналы управления на входы следящих приводов всех его степеней подвижности,…» обеспечивает точный перевод рабочего инструмента манипулятора из его текущего положения в исходное в начале сформированной на поверхности объекта работ траектории до касания рабочего инструмента с этим объектом.
Признак «…после выявления тактильным датчиком контакта рабочего инструмента с объектом работ,…» позволяет выявить факт появления контакта между рабочим инструментом манипулятора и объектом работ при переводе этого инструмента в начальную точку траектории. В результате удается исключить возможный зазор между поверхностью объекта работ и рабочим инструментом манипулятора, а, следовательно, и его возможное соударение с объектом после начала движения манипулятора.
Признак «…используя рекуррентные соотношения, с учетом текущей конфигурации манипулятора определяют величины внешних моментов во всех его сочленениях, на основе которых формируют входные сигналы на его приводы, обеспечивая создание исходного полного вектора силового воздействия со стороны его рабочего инструмента на объект работ, который учитывает составляющие сухого трения и сопротивления движению рабочего инструмента вдоль построенных траекторий, и в зависимости от выполняемой программы задают скорость перемещения рабочего инструмента манипулятора по ранее сформированной траектории,…» позволяет обеспечить движение рабочего инструмента манипулятора по сформированной траектории с заданной скоростью с требуемым в зависимости от технологической операции силовым воздействием на поверхность объекта работ с учетом силы сухого трения и другого сопротивления движению рабочего инструмента по обрабатываемой поверхности. В отличие от использованного в прототипе метода задания желаемого силового воздействия на объект работ в предложенном решении в процессе движения рабочего инструмента манипулятора по сформированной траектории учитывают силы сухого трения и иного сопротивления движению этого инструмента, обеспечивая тем самым создание полного, требуемого технологией выполняемой операции, силового и моментного воздействия на объект работ.
Признак «…затем на входы позиционно-силовых систем управления приводами манипулятора подают соответствующие заданным скоростям и векторам силового воздействия сигналы, в состав которых входят программные и реальные значения обобщенных координат манипулятора, их скоростей и ускорений, а также соответствующих внешних моментов.» позволяет обеспечить точное движение рабочего инструмента манипулятора по сформированной траектории с одновременным созданием точного силового и моментного воздействий на поверхность объекта работ. В отличие от прототипа, в котором описывается только метод создания некоторого силового воздействия в точке и не указывается, как при этом реализуется одновременное движение манипулятора по заданной траектории, в новом решении позиционно-силовое управление приводами манипулятора реализуется за счет подачи на их входы таких сигналов, которые создадут на их выходных валах внешние моменты, обеспечивающие, с одной стороны, требуемое силовое воздействие на объект работ, а с другой стороны, требуемое точное движение по заданным траекториям, при этом контур позиционно-силового управления приводами манипулятора замкнут отрицательными обратными связями по положениям выходных валов приводов и их производным, определяемых наблюдателями, а также по реальным величинам внешних моментов на валах приводов, обусловленных только силовым воздействием на объект и определяемых с использованием точно идентифицированных присоединяемых к звеньям манипулятора масс и моментов инерции жидкости.
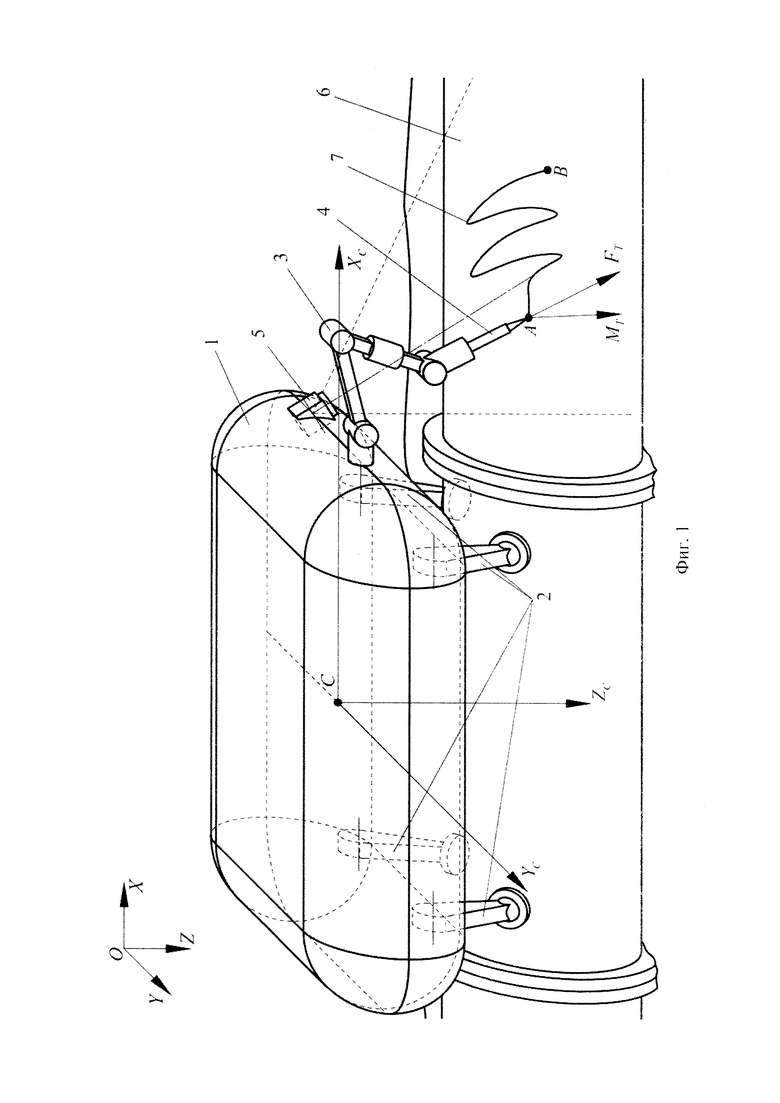
Заявляемое изобретение иллюстрируется чертежом (см. фиг. 1), на котором введены следующие обозначения: 1 - корпус АНПА, управляемый по шести степеням свободы; 2 - устройство крепления (УК) АНПА 1 к объекту работ, реализуемое с помощью присосок или магнитов; 3 - шестистепенной ММ с рабочим инструментом (РИ) 4; 5 - система технического зрения (СТЗ) с двумя вращательными взаимно перпендикулярными степенями подвижности для изменения пространственной ориентации оптической оси; 6 - объект работ (ОР); 7 - очередная траектория движения конца РИ 4, оказывающего силовое воздействие на ОР 6 в процессе этого движения; А, В - начальная и конечная точки траектории 7; OXYZ - абсолютная система координат (АСК) (ее ось Z направлена вертикально вниз); С - геометрический центр АНПА 1; CXCYCZC - система координат (СК), связанная с корпусом АНПА 1; FT, MT - соответственно, векторы силы и момента, действующие со стороны РИ 4 ММ 3 на ОР 6.
Заявленный способ реализуется следующим образом. Для обеспечения точного выполнения контактных силовых операций под водой АНПА 1 оснащают ММ 3, конфигурация которого имеет шесть степеней подвижности, три из которых - переносные, и три - ориентирующие, которые позволяют обеспечить любую пространственную ориентацию векторов силового и моментного воздействия на ОР 6 с помощью РИ 4. Для исключения возможного смещения АНПА 1 вместе с СК CXCYCZC от своего исходного положения в процессе выполнения контактных операций при указанных силовых и моментных воздействиях на ОР 6, а также при наличии любых подводных течений и внешних возмущений АНПА 1 оснащают УК 2 (Design and Control for Vacuum Contact Devices of Mobile Wall Climbing Robot Application in Complex Environment / V. G. Gradetsky, M. M. Knyazkov, E. A. Semenov, A. N. Sukhanov // Studies in Systems, Decision and Control. - 2020. - T. 261. - C. 143-155.) для его жесткой фиксации относительно ОР 6.
Перед началом работ, ориентируясь на информацию, поступающую от СТЗ 5, АНПА 1 перемещают в водной среде так, чтобы интересующие части ОР 6 находились в рабочей области ММ 3 и области видимости СТЗ 5, а АНПА 1 мог жестко зафиксироваться с помощью УК 2 на свободном участке ОР 6 или на предварительно установленной посадочной площадке вблизи него (см фиг. 1).
После жесткой фиксации АНПА 1 на ОР 6 или на посадочной площадке осуществляют идентификацию масс и моментов инерции жидкости, присоединяемой к двум главным движущимся звеньям манипулятора. Для этого задают движение ММ 3 по специальным тестовым траекториям, изменяя все обобщенные координаты переносных степеней подвижности ММ 3. В процессе этого движения на выходные валы приводов переносных степеней подвижности манипулятора действуют внешние моменты, обусловленные взаимовлияниями между двумя главными звеньями ММ 3, наличием присоединенных масс и моментов инерции жидкости, а также вязкими трениями при движениях каждого звена ММ в водной среде. Величины указанных обобщенных моментов, а также скорости и ускорения изменения всех обобщенных координат ММ 3 в конкретные моменты времени определяют в режиме реального времени с помощью диагностических наблюдателей (Жирабок А.Н., Зуев А.В., Филаретов В.Ф., Шумский А.Е. Идентификация дефектов в нелинейных системах на основе скользящих наблюдателей с ослабленными условиями существования // Известия РАН. Теория и системы управления. - 2022. - №3.- С. 21-30), учитывая динамические параметры соответствующих исполнительных электроприводов. Из полученных обобщенных моментов вычитают рассчитанные аналитически составляющие взаимовлияний между двумя указанными звеньями ММ (Шахинпур М. Курс робототехники. - М.: Мир. - 1990. - С. 312-333) и соответствующие моменты вязких трений, которые заранее определяют известным методом (Филаретов В.Ф., Коноплин А.Ю. Система автоматической стабилизации подводного аппарата в режиме зависания при работающем многозвенном манипуляторе. Часть 1 // Мехатроника, автоматизация, управление. - 2014. - №6. - С. 53-56). Оставшуюся часть обобщенных моментов, обусловленную только наличием неизвестных присоединенных масс и моментов инерции жидкости, представляют в аналитическом виде и преобразуют в линейную регрессионную форму за счет группировки неизвестных параметров относительно известных составляющих. При этом присоединенные массы жидкости представляют в матричном виде (Fossen T.I. Guidance and control of oceanic vehicles. - John Willei and Sons. - 1994. - C. 117-121), учитывающем изменение величины присоединенной массы звена в зависимости от его ориентации к набегающему потоку жидкости. Далее неизвестные значения присоединенных масс и моментов инерции жидкости точно определяют с использованием фильтра Калмана (Ikonen Е. Advanced process identification and control / E. Ikonen, K. Najim. - Marsel Dekker Inc. - 2002. - C. 37-45), используя информацию об изменении обобщенных координат ММ 3 и их производных в каждый момент времени движения его РИ 4 по тестовым траекториям.
Затем, с помощью СТЗ 5 формируют 3D-модель ОР 6, для которой в функции времени строят желаемые траектории движения РИ 4 по поверхности ОР 6, представляемые в памяти управляющего контроллера в виде набора последовательно расположенных точек или аналитического описания сплайнами, с требуемой ориентацией РИ 4 в АСК, а также с требуемыми направлением и величиной силового и моментного воздействия на ОР 6 в каждой точке этих траекторий. После этого для указанных траекторий в функции времени, решая на управляющем контроллере обратные задачи кинематики (ОЗК) (Fu K., Gonzales R. С, Lee С.S. G. Robotics: control, sensing, vision and intelligence // McGraw Hill. - 1987. - P. 53-75) для известной конструкции MM 3, определяют и запоминают в его памяти желаемые законы изменения всех обобщенных координат этого ММ.
Далее, зная положение начальной точки А указанных траекторий 7 относительно точки С АНПА 1, а также текущую конфигурацию ММ 3, после решения ОЗК для этого манипулятора формируют законы изменения во времени всех его обобщенных координат для перевода РИ 4 ММ 3 из его исходного положения в точку А и подают соответствующие им управляющие сигналы на входы приводов соответствующих степеней подвижности манипулятора, обеспечивая перевод его РИ 4 из исходного положения до контакта ОР 6 в точке А. Факт выявления контакта РИ 4 с ОР 6 в точке А обеспечивают тактильным датчиком (Воротников С.А. Информационные устройства робототехнических систем: Учеб. пособие. -М.: Изд-во МГТУ им. Н.Э. Баумана, 2005. - С. 363-371), устанавливаемым в месте крепления РИ 4 к последнему звену ММ 3, или иными известными средствами.
После выявления этого контакта, используя известные рекуррентные соотношения (Филаретов В.Ф., Зуев А.В., Губанков А.С. Управление манипуляторами при выполнении различных технологических операций. -М.: Наука, 2018. - с. 99-102) с учетом текущей конфигурации ММ 3 определяют желаемые значения внешних моментов во всех сочленениях ММ 3, которые в совокупности создают в точке А исходные желаемые и возможно переменные по величине и направлению силу FT и (или) момент MT со стороны РИ 4 на ОР 6. Затем, непрерывно решая обратную задачу динамики (ОЗД) для ММ 3 по рекуррентному алгоритму (Филаретов В.Ф., Коноплин А.Ю. Система автоматической стабилизации подводного аппарата в режиме зависания при работающем многозвенном манипуляторе. Часть 1 // Мехатроника, автоматизация, управление. - 2014. - №6. - С. 53-56) с учетом внешних моментов, обусловленных взаимовлияниями между перемещающимися в вязкой среде звеньями ММ 2, а также моментов, определяемых ранее идентифицированными присоединенными массами и моментами инерции жидкости, на входы приводов всех степеней подвижности ММ 3 подаются соответствующие управляющие сигналы, обеспечивающие желаемые силовые и моментные воздействия на ОР 6 в точке А.
Если РИ 4 требуется смещать с заданными FT и MT (возможно переменными) по сформированной ранее траектории 7 по поверхности ОР 6 от точки A и до точки В, то к исходному вектору силы FT добавляют еще векторы сил сухого трения и силового воздействия на объект вдоль траектории 7. В результате формируют новые векторы силы FT и момента MT. Эти векторы используют при переводе РИ 4 из исходной точки А в очередную точку на траектории 7.
Перед началом рабочего движения ММ 3 в зависимости от выполняемой программы задают постоянную или переменную скорость перемещения конца его РИ 4 по траектории 7 от точки А до точки В с уже определенным и возможно переменным силовым FT и моментным MT воздействием этого РИ 4 на ОР 6. Сформированные для каждой степени подвижности ММ 3 программные значения обобщенных координат, их скоростей и ускорений, а также программные значения внешних моментов с учетом соответствующих величин полученных новых значений FT, MT, моментов вязкого трения и моментов, учитывающих присоединенные массы и моменты инерции окружающей жидкости, подают на входы позиционно-силовых систем управления всеми электроприводами ММ 2 (Филаретов В.Ф., Зуев А.В., Губанков А.С. Управление манипуляторами при выполнении различных технологических операций. - М.: Наука, 2018. - с. 93-99). Эти позиционно-силовые системы обеспечивают одновременную минимизацию ошибок как по положению выходного вала редуктора каждого электропривода ММ 2, так и по развиваемому на нем внешнему моменту. В результате обеспечивают точное движение РИ 4 по траектории 7 с точным силовым воздействием на ОР 6.
Во время этого движения для определения фактических значений внешних моментов приводов ММ, обусловленных только воздействием РИ 4 на ОР 6, и реализации обратных связей указанных позиционно-силовых систем, используют вычисленные с помощью диагностических наблюдателей суммарные значения обобщенных внешних моментов, из которых, как отмечалось ранее, вычитают составляющие взаимовлияний между всеми степенями подвижностей ММ с учетом реальных значений масс и моментов инерции звеньев ММ, моменты от действия гидростатических сил и сил вязкого трения, а также моменты, обусловленные наличием идентифицированных присоединенных масс и моментов инерции жидкости.
Изобретение относится к робототехнике и может быть использовано при создании систем управления автономными необитаемыми подводными аппаратами с многостепенными манипуляторами. Изобретение обеспечивает неизменно точное автоматическое выполнение манипулятором подводного аппарата различных технологических операций, требующих точного силового взаимодействия его рабочего инструмента с подводными объектами во время выполнения этих операций, когда необходимо обеспечить точное перемещение этого инструмента по любым пространственным траекториям в рабочей зоне манипулятора с одновременным созданием заданного по величине и направлению силового воздействия со стороны рабочего инструмента на указанные объекты без возможных потерь контактов с этими объектами при любых величинах подводных течений. 1 ил.
Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором, в процессе реализации которого вычисляют внешние моменты, действующие на выходные валы приводов всех степеней подвижности манипулятора при силовых контактах его рабочего инструмента с поверхностью объекта работ, посредством вычитания из величины результирующего внешнего момента, действующего на выходной вал привода каждой степени подвижности манипулятора и измеряемого наблюдателем момента нагрузки соответствующего привода, величины момента, вычисляемого с помощью аналитических выражений для решения обратной задачи динамики упомянутого манипулятора и обусловленного эффектами взаимовлияния между всеми степенями его подвижности, а также гидростатическими и гидродинамическими силами сопротивления его движению, включая силы вязкого трения и силы, обусловленные наличием присоединенных масс окружающей жидкости, отличающийся тем, что кинематическая схема используемого манипулятора имеет шесть степеней свободны, три из которых - переносные и три - ориентирующие, обеспечивающие любую пространственную ориентацию вектора силового и моментного воздействия на объект работ, а подводный аппарат дополнительно оснащают магнитными устройствами крепления или присосками, с помощью которых до начала рабочих операций аппарат жестко фиксируют вблизи обрабатываемого участка, наблюдаемого системой технического зрения, непосредственно на объекте работ или на посадочной платформе, после фиксации аппарата во время тестовых движений манипулятора с помощью фильтра Калмана определяют значения масс и моментов инерции окружающей жидкости, присоединяемой к двум главным звеньям переносных степеней подвижности манипулятора, затем с помощью систем технического зрения формируют 3D-модель объекта работ, с использованием которой в абсолютной системе координат строят требуемые траектории движения рабочего инструмента манипулятора, в каждой точке которых задают величины и направления его силового воздействия на объект работ в соответствии с выполняемыми технологическими операциями и запоминают все это в памяти управляющего процессора, затем, зная исходные конфигурации манипулятора и положения начальных точек построенных траекторий, а также, решая обратные задачи кинематики, определяют законы изменения во времени всех обобщенных координат манипулятора и переводят его рабочий инструмент из исходного положения до контакта с объектом в начальной точке конкретной траектории, подавая соответствующие сигналы управления на входы следящих приводов всех его степеней подвижности, после выявления тактильным датчиком контакта рабочего инструмента с объектом работ, используя рекуррентные соотношения, с учетом текущей конфигурации манипулятора определяют величины внешних моментов во всех его сочленениях, на основе которых формируют входные сигналы на его приводы, обеспечивая создание исходного полного вектора силового воздействия со стороны его рабочего инструмента на объект работ, который учитывает составляющие сухого трения и сопротивления движению рабочего инструмента вдоль построенных траекторий, и в зависимости от выполняемой программы задают скорость перемещения рабочего инструмента манипулятора по ранее сформированной траектории, затем на входы позиционно-силовых систем управления приводами манипулятора подают соответствующие заданным скоростям и векторам силового воздействия сигналы, в состав которых входят программные и реальные значения обобщенных координат манипулятора, их скоростей и ускорений, а также соответствующих внешних моментов.
| Способ позиционно-силового управления подводным аппаратом с многозвенным манипулятором для выполнения контактных манипуляционных операций с подводными объектами | 2022 |
|
RU2789510C1 |
| CN 102029611 А, 27.04.2011 | |||
| US 20210064034 A1, 04.03.2021. | |||

