Область техники
Система относится к области систем обработки информации и испытательной технике и может быть использовано для настройки, калибровки и испытаний цифровых систем обработки информации и управления из состава бортовых радиотехнических систем (БРТС) космических аппаратов (КА) дистанционного зондирования Земли.
Уровень техники
Известна контрольно-проверочная аппаратура (КПА) КА (патент RU 2717293, МПК B64G 5/00, опубл. 19.03.2020), включающая персональный компьютер, коммутатор цифровых потоков, векторный анализатор, приемник, аттенюаторы, цифровой сигнальный процессор, векторный генератор, передатчик, блок связи КПА с системой телеизмерений КА, блок связи КПА с командной матрицей системы управления бортовой аппаратурой КА, измеритель сопротивления и блок контроля сопротивления изоляции бортовых шин питания КА, приемную и передающую антенны и рубидиевый стандарт частоты.
Известна автоматизированная испытательная система для отработки, электрических проверок и подготовки к пуску КА (патент RU 2245825, МПК B64G 5/00, опубл. 10.02.2005), содержащая блок приведения автоматизированной испытательной системы в готовность к испытаниям КА, блок управления, блок ввода и анализа корректности директив автоматической программы испытаний, блок интерпретации директив, блок передачи допусковых значений параметров, блок выбора трактов связи с КА, блок проведения защитных операций, блок выдачи технологических команд управления, блок связи с системой бортовых телеизмерений, блок связи с бортовой вычислительной системой (БВС), блок измерения аналоговых параметров, блок ввода и запоминания состояния дискретных параметров, блок допускового контроля аналоговых параметров, блок допускового контроля дискретных параметров, блок формирования команд общего назначения, блок формирования протокола испытаний, блок отображения, блок регистрации основного протокола испытаний, блок контроля корпуса, блок формирования сигнала наличия корпуса, блок контроля работоспособности аппаратуры, блок трансляции директив, блок допускового контроля поставленных на слежение дискретных параметров, блок допускового контроля поставленных на слежение аналоговых параметров, блок допускового контроля поставленных на слежение параметров БВС.
Недостатком известных технических решений является то, что они позволяют проводить фазовую калибровку только при равных значениях фазы в проверяемых каналах (т.е. только в фазовой плоскости, перпендикулярной плоскости антенн), что не позволяет проводить настройку и проверки БРТС при произвольных значениях фаз в приемных каналах, т.е. не позволяет проводить натурное моделирование работы бортовых систем с источниками радиоизлучения, находящимися под углом к траектории движения КА.
Наиболее близким к заявляемой системе решением является КПА КА, реализующая способ электрических проверок КА (патент RU 2563925, МПК B64G 5/00, опубл. 27.09.2015), которая содержит рабочее место, оборудованное ПЭВМ, блоки контроля сопротивления изоляции бортовых шин питания КА и измерения электрического сопротивления между шинами питания КА, блоки связи КПА КА с системой бортовых телеизмерений КА и связи КПА с командной матрицей системы управления бортовой аппаратурой КА, блок связи КПА с БВС КА, измерители параметров принимаемого радиосигнала, анализатор спектра принимаемого радиосигнала, приемник и приемную антенну КПА КА, адресный коммутатор цифровых потоков, управляемые аттенюатор и аттенюатор-делитель.
Основным техническим недостатком известной системы является отсутствие возможности проводить точную регулировку и настройку фазы в приемных устройствах - определение точных значений разности фаз, введение корректирующих фазовых поправок, динамическое измерение фазы; имеется возможность проводить только ограниченное количество проверок. В результате чего при настройке и испытаниях невозможно проводить имитацию работы обнаружителя в режимах обзора под углами, отличными от нормали к плоскости антенной решетки. Кроме того, это не позволяет формировать динамическую диаграмму направленности для более детального (длительного) наблюдения за источниками радиоизлучения при движении КА по орбите.
Сущность изобретения
Техническая проблема, решаемая заявленным изобретением, заключается в расширении функциональных возможностей приемной бортовой аппаратуры КА на этапах настройки, отладки и испытаний.
Технический результат заключается в осуществлении возможности автоматизированного задания произвольных значений фазы в приемных трактах бортовой аппаратуры КА, обеспечении проверки бортовой аппаратуры за счет обеспечения контроля работоспособности и измерения характеристик приемного тракта командной радиолинии и передающего тракта телеметрической радиолинии КА в части определения параметров радиотехнических сигналов и осуществление возможности их направления на источники радиоизлучения для всех возможных условий, соответствующих параметрам движения КА в процессе эксплуатации.
Технический результат достигается за счет того, что система проверки бортовых радиотехнических систем космических аппаратов, содержащая два рабочих места операторов с персональными электронно-вычислительными машинами (ПЭВМ), модуль имитации бортового комплекса управления космического аппарата, модуль анализа телеметрической, служебной информации и результатов работы контролируемой аппаратуры, подключенных к пульту автоматизированной контрольно-проверочной аппаратуры, который подключен через крейт к блокам бортовой радиотехнической системы, подключенным через коммутатор входных сигналов к приемным антеннам, шкаф подсистемы электропитания, подключенный к блокам бортовой радиотехнической системы и к пульту автоматизированной контрольно-проверочной аппаратуры, генераторную стойку с системой коммутации трактов, включающую векторный генератор и делитель высокочастотного сигнала, согласно предложенному решению, дополнительно содержит третье рабочее место оператора и управляемые персональной электронной-вычислительной машиной фазовращатели, квазиколлиматоры, а делитель высокочастотного сигнала выполнен в виде высокочастотного трансформатора-распределителя, выполненного с возможностью задания, регулировки и настройки фазы сигнала в приемных устройствах, при этом векторный генератор через трансформатор-распределитель подключен к управляемым фазовращателям, соединенным с квазиколлиматорами.
Краткое описание чертежей
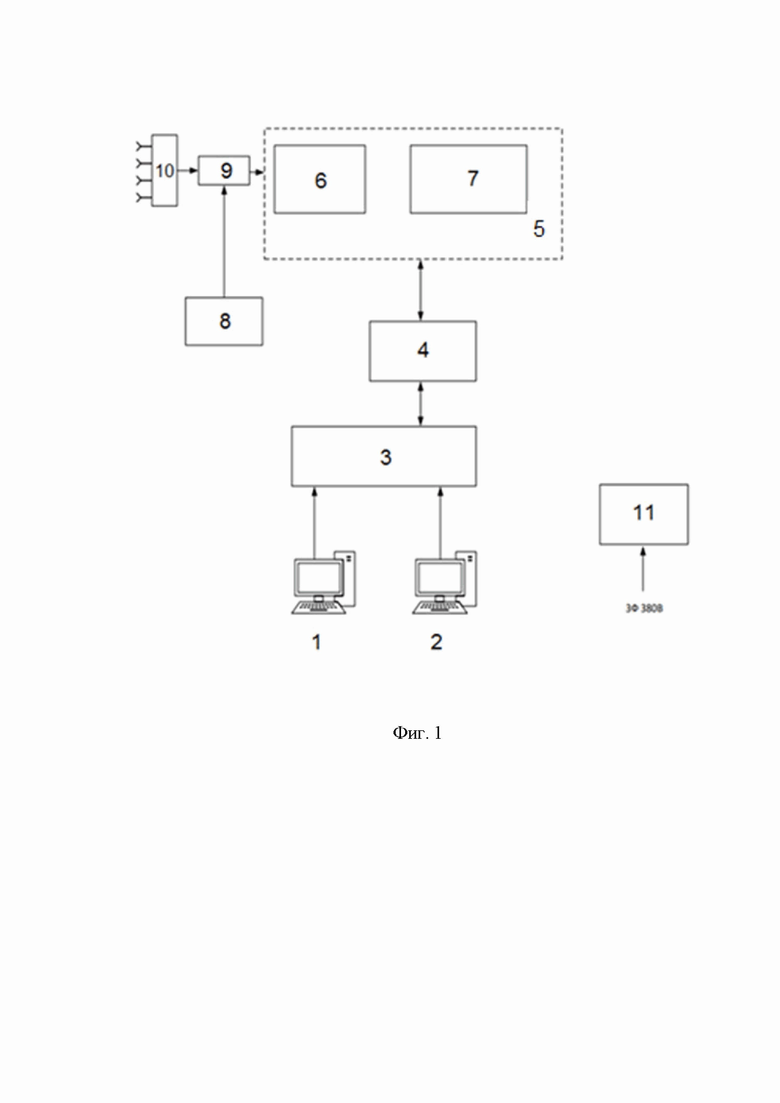
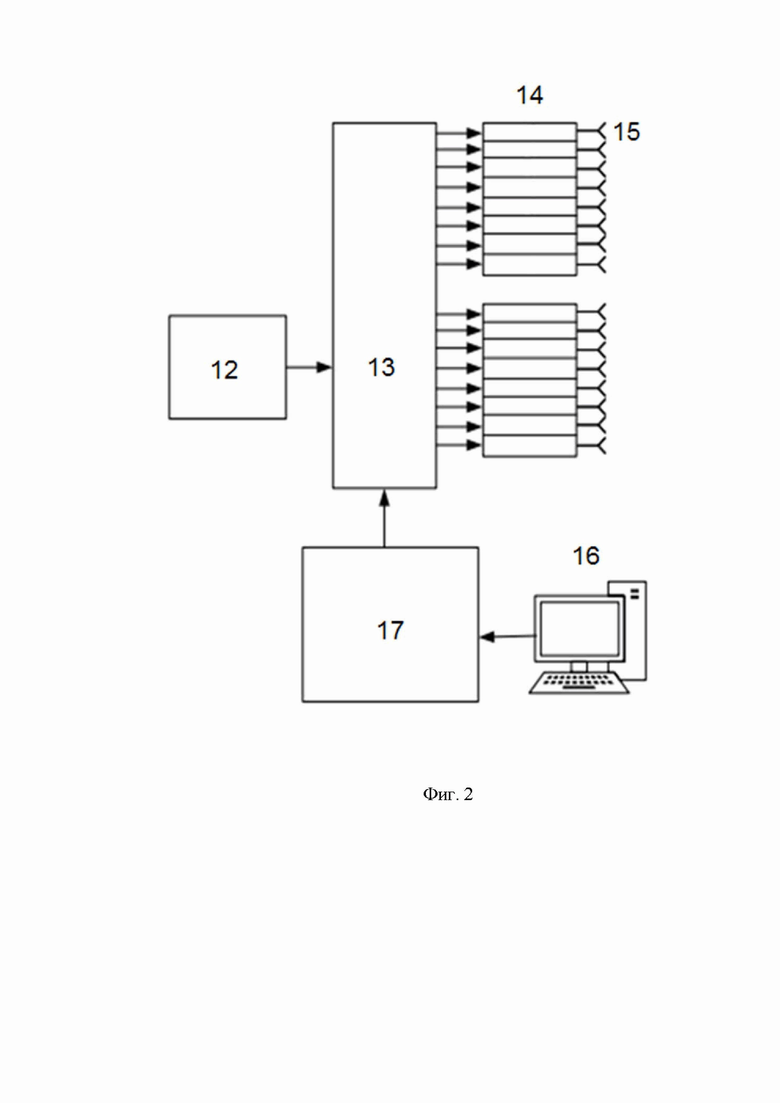
На фиг. 1 и 2 представлены функциональные схемы системы, поясняющие сущность заявляемого изобретения, которые содержат рабочее место оператора 1 с ПЭВМ1; включающей модуль имитации БРТС, рабочее место оператора 2 с ПЭВМ2, включающей модуль анализа телеметрической, служебной информации и результатов работы БРТС, пульт автоматизированной контрольно-проверочной аппаратуры (АКПА) 3, крейт 4, БРТС 5, включающая блоки 6 и 7 цифровой обработки и управления, соответственно, аппаратуру формирования тестового сигнала 8, коммутатор входной цепи 9, приемные антенны 10, шкаф подсистемы электропитания 11, векторный генератор (ВГ) 12, трансформатор-распределитель (ТР) 13, управляемые фазовращатели 14, квазиколлиматоры 15, рабочее место оператора 16 с ПЭВМ3, пульт управления фазовращателями 17.
Осуществление изобретения
Рабочее место оператора 1 с ПЭВМ1, включающей модуль имитации БРТС, предназначено для формирования сеанса (параметров) работы
БРТС 5 - тестового, калибровочного, рабочего; частоты диапазонов наблюдения, задания и получения (считывания) информации объективного контроля (ИОК).
Рабочее место оператора 2 с ПЭВМ2, включающей модуль анализа телеметрической, служебной информации и результатов работы БРТС, предназначено для считывания, обработки и хранения данных наблюдения, данных телеметрического контроля.
Пульт АКПА 3 содержит промышленный компьютер, предназначенный для обработки команд от ПЭВМ1 и выдачи их на блоки 6 и 7 цифровой обработки и управления, соответственно, БРТС 5; хранения, формирования и выдачи файл-шаблонов с параметрами сеансов работы, формирования синхросигнала 1 Гц, а также ручного режима подачи разовых и программных команд управления БРТС 5.
Крейт 4 получает управляющие команды от ПЭВМ 1 через пульт АКПА 3 и передает их на исполнительные устройства (реле) блоков БРТС 5.
Для возможности проведения калибровочного сеанса предусмотрена аппаратура формирования тестового сигнала 8 и коммутатор входных цепей 9, принимающий сигнал с приемных антенн 10.
Шкаф подсистемы питания 11 содержит управляемые источники электропитания БРТС 5 (основной и резервный) и предназначен для контроля параметров бортовой сети 28В БРТС (потребляемой мощности, тока, защиты цепей БРТС от превышения по напряжению и току), и по командам от АКПА - подачи напряжения 28В на БРТС.
Генераторная стойка включает задающий ВГ 12 с диапазоном частот до 40 ГГц и управляемый коммутатор ВЧ сигнала. Генератор 12 и коммутатор получают команды от АКПА по интерфейсу Ethernet, которые содержат директивы параметров перестройки частоты и мощности выходного сигнала. Коммутатор ВЧ сигнала по командам от АКПА подает сигнал от ВГ 12 на один из 5 выходов, соответствующий значению частоты поддиапазона работы БРТС 5.
Делитель ВЧ сигнала представляет собой фазостабильный ТР 13 на шестнадцать выходов. Управляемые фазовращатели 14 выполнены в интегральном исполнении на микросхемах ADL5390 (фирмы Analog Devices) и позволяют изменять фазу входного сигнала путем подачи цифрового кода. Пульт управления 17 фазовращателями получает данные с ПЭВМ3 и преобразует их в формат, необходимый для работы фазовращателей.
Рабочее место оператора 16 предназначено для управления фазовращателями 14, с целью определения режима работы фазовращателей: статического, динамического диапазона значений фаз в каждом канале и длительности перестройки фазы.
Квазиколлиматоры 15 предназначены для подачи сигнала на приемные антенны 10 БРТС 5 при наземной отработке (настройке, регулировке и испытаниях). Высокочастотный ТР 13 подает сигнал от ВГ 12 на каждый коллиматор 15, соответственно количеству антенн 10 диапазона частот.
Заявляемая система работает следующим образом.
При подаче сетевого напряжения на пульт АКПА 3 и шкаф подсистемы питания 11 начинается процедура самотестирования, по результатам которой на пульте загорается индикатор (исправность - ОК или неисправен).
Одновременно происходит загрузка операционных систем ПЭВМ1 - ПЭВМ3 на рабочих местах операторов 1, 2, 16.
Тумблерами на передней панели пульта АКПА 3 включаются:
- ВГ 12;
- узел вентиляции БРТС;
- шкаф подсистемы питания БРТС 11;
Далее происходит подача напряжения со шкафа подсистемы питания 11 на составные части БРТС 5 согласно заданной на ПЭВМ1 циклограмме работ.
После прохождения всех процедур самотестирования, на рабочем месте 1 оператора ПЭВМ1 запускается процесс формирования сеанс наблюдения (ФСН), задаются параметры и режимы работы БРТС 5, длительность работы аппаратуры.
В ФСН задается номер сеанса, загружаются параметры конкретного сеанса: навигационные параметры (задают положение аппарата на орбите), параметры ориентации (положение аппарата по трем осям и относительно точки наблюдения на поверхности Земли), параметры работы БРТС (режим работы - калибровочный или целевой; диапазон частот, скорость и количество проходов по диапазону, начальные условия работы, абсолютное время), длительность сеанса, команды управления подачей бортового электропитания к задействованным в конкретном сеансе блокам БРТС 5, осуществляют общее конфигурирование входных и промежуточных цепей приемного и обрабатывающего тракта.
Далее происходит начальная коммутация блоков БРТС 5: данные из файл-шаблонов поступают на крейт 4, преобразуются в управляющие команды и далее подаются на исполнительные устройства.
После подачи бортового напряжения на все задействованные в текущем сеансе блоки БРТС 5, происходит загрузка массивов данных в блоки 6 и 7 цифровой обработки и управления, соответственно БРТС.
С рабочего места 16 оператора ПЭВМ3 загружаются данные управления частотными и фазовыми параметрами тестового сигнала в ВГ 12 и управляемые фазовращатели 14.
Далее блоками 6 и 7 цифровой обработки и управления, соответственно, из состава тестируемой БРТС осуществляется загрузка и разворачивание циклограммы, при этом ПЭВМ2 из состава КПА выдает синхросигнал частотой 1 Гц и команды управления, тем самым имитируя бортовой комплекс управления КА.
После загрузки и развертывания циклограммы наблюдения тестируемой БРТС 5 начинается сеанс наблюдения, полностью аналогичный штатной работе БРТС в процессе эксплуатации.
При этом по готовности БРТС 5 к приему тестовых сигналов в заданном в исходных данных частотном диапазоне, осуществляется автоматическая перестройка ВГ 12 и фазовращателей 14. С выхода ВГ 12 сигнал подается на ТР 13 и далее, через квазиколлиматоры 15, на антенны приемного тракта 10 БРТС.
В ходе выполнения сеанса наблюдения обработанная телеметрическая, служебная и целевая информация, сформированная блоками и узлами из состава контролируемых блоков БРТС 5, поступает на вход ПЭВМ2, имитирующей функции бортовой аппаратуры передачи информации в части приема данных, управления режимами приема и сохранения полученных данных в бортовое запоминающее устройство.
В ходе сеанса возможна имитация нештатных ситуаций для отработки БРТС на устойчивость и надежность по питанию бортовой сети, нештатному отключению элементов БРТС и БРТС в целом, обрывов информационных линий от бортового комплекса управления аппарата и передачи информации в бортовую аппаратуру в режиме автономной работы контролируемых БРТС.
При штатном завершении сеанса наблюдения осуществляется поэтапное отключение питания блоков и узлов контролируемых БРТС 5, прием служебной информации об окончании сеанса и информации объективного контроля от БРТС, завершение информационных сеансов БРТС с бортовым комплексом управления (ПЭВМ1) и бортовой аппаратурой передачи информации (ПЭВМ2).
После окончания сеанса на ПЭВМ2 осуществляется контроль целостности всех данных, принятых в течение и по завершению работы БРТС, проводится анализ служебной и телеметрической информации, осуществляется проверка информации объективного контроля о состоянии аппаратуры в течение всего сеанса наблюдения.
Независимо проверяется полнота и качество целевой информации, принятой по результатам обработки входного сигнала по частотным, фазовым и временным параметрам путем сравнения с заданными для ВГ и фазовращателей перед началом сеанса параметрами тестового сигнала.
Проводится расчет коэффициента эффективности выполнения задания БРТС на сеансе.
Таким образом, заявляемая система позволяет обеспечить цикличный характер задания, выполнения и анализа результатов сеансов наблюдения по заложенной программе в автоматическом режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЬНО-ПРОВЕРОЧНАЯ АППАРАТУРА КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2563925C1 |
| Контрольно-проверочная аппаратура космического аппарата | 2018 |
|
RU2717293C1 |
| Унифицированный командно-измерительный пункт | 2019 |
|
RU2713679C1 |
| Способ проведения натурных испытаний аппаратуры в космосе и система для его осуществления | 2022 |
|
RU2803218C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К НЕРАВНОМЕРНОСТИ ПОТОКА ДАННЫХ ТЕЛЕИЗМЕРЕНИЙ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480838C2 |
| АВТОМАТИЗИРОВАННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ЭЛЕКТРИЧЕСКИХ ИСПЫТАНИЙ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2552576C1 |
| РАДИОКОМПЛЕКС ДЛЯ СИСТЕМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ, УСТАНАВЛИВАЕМЫХ НА КОСМИЧЕСКИЕ АППАРАТЫ | 2016 |
|
RU2604355C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2518014C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ В ПОЛЕТЕ И НАЗЕМНЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2588178C1 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
Система относится к области систем обработки информации и испытательной технике и может быть использовано для настройки, калибровки и испытаний цифровых систем обработки информации и управления из состава бортовых радиотехнических систем (БРТС) космических аппаратов (КА) дистанционного зондирования Земли. Система проверки БРТС КА содержит три рабочих места операторов, фазовращатели, квазиколлиматоры, модуль имитации бортового комплекса управления КА, модули анализа телеметрической, служебной информации и результатов работы контролируемой аппаратуры, подключенные к пульту автоматизированной контрольно-проверочной аппаратуры, генераторную стойку с системой коммутации трактов. Делитель высокочастотного сигнала выполнен в виде высокочастотного трансформатора-распределителя. При этом третье рабочее место оператора предназначено для управления фазовращателями. Обеспечивается расширение функциональных возможностей приемной бортовой аппаратуры КА на этапах настройки, отладки и испытаний. 2 ил.
Система проверки бортовых радиотехнических систем космических аппаратов, содержащая два рабочих места операторов с персональными электронно-вычислительными машинами, модуль имитации бортового комплекса управления космического аппарата, модуль анализа телеметрической, служебной информации и результатов работы контролируемой аппаратуры, подключенные к пульту автоматизированной контрольно-проверочной аппаратуры, который подключен через крейт к блокам бортовой радиотехнической системы, подключенным через коммутатор входных сигналов к приемным антеннам, шкаф подсистемы электропитания, подключенный к блокам бортовой радиотехнической системы и к пульту автоматизированной контрольно-проверочной аппаратуры, генераторную стойку с системой коммутации трактов, включающую векторный генератор и делитель высокочастотного сигнала, отличающаяся тем, что она дополнительно содержит третье рабочее место оператора, фазовращатели, квазиколлиматоры, а делитель высокочастотного сигнала выполнен в виде высокочастотного трансформатора-распределителя, выполненный с возможностью задания, регулировки и настройки фазы сигнала в приемных устройствах, при этом векторный генератор через трансформатор-распределитель подключен к управляемым фазовращателям, соединенным с квазиколлиматорами, при этом третье рабочее место оператора предназначено для управления фазовращателями.
| КОНТРОЛЬНО-ПРОВЕРОЧНАЯ АППАРАТУРА КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2563925C1 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2526500C1 |
| US 3535683 A1, 20.10.1970 | |||
| CN 105173124 B, 07.07.2017 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |

