Изобретение относится к системам обмена данными и может быть использовано для реализации информационного обмена через наземные комплексы (НК) между источниками (получателями) информации, расположенными на воздушных подвижных объектах (ПО), и получателями (источниками) информации, расположенными на Земле.
В системе радиосвязи с подвижными объектами [1] во время движения подвижные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом связи с помощью всенаправленного излучения бортовой антенной радиосигналов передатчика. Принимаемые наземным комплексом связи из канала «Воздух-Земля» сообщения через аппаратуру передачи данных (АПД) поступают в вычислитель автоматизированного рабочего места (АРМ) оператора, где в соответствии с принятым в системе протоколом обмена, производится идентификация принятого в сообщении адреса с адресами подвижных объектов, хранящимися в его памяти. При совпадении адреса подвижного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ПО и состоянии его датчиков выводится на экран монитора наземного АРМ. В вычислителе АРМ на базе ПЭВМ решается задача обеспечения непрерывной радиосвязи со всеми N ПО. При выходе за пределы радиогоризонта хотя бы одного из ПО или приближении к границе зоны устойчивой радиосвязи определяют программно один из ПО, который назначается ретранслятором сообщений. По результатам анализа местоположения и параметров движения остальных ПО определяют оптимальные пути доставки сообщений к удаленному от НК за радиогоризонт ПО. Сообщение от НК через последовательную цепочку, состоящую из (N-1) ПО, может быть доставлено N-му ПО. Для этого на НК в формирователе типа ретранслируемых сообщений в заранее определенные разряды (заголовок) передаваемой кодограммы закладывают номер ПО, назначенного ретранслятором, и адреса воздушных объектов, обеспечивающих заданный трафик сообщения. Принятые с помощью всенаправленной бортовой антенны на подвижном объекте сообщения анализируют в блоке анализа типа сообщений. После анализа решают вопрос о направлении данных по двунаправленной шине в систему управления подвижного объекта или ретрансляции их на соседний ПО.
В обычном режиме, когда не требуется ретрансляция сигналов с НК, осуществляют адресный опрос ПО путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) сообщение отображают на мониторе АРМ. На ПО после прохождения через антенну, радиостанцию, аппаратуру передачи данных сигнал подают в бортовой вычислитель, где производят идентификацию принятого в сообщении адреса с собственным адресом подвижного объекта. Далее сообщение передают в блок анализа типа ретранслируемого сообщения, где производят дешифрацию полученного заголовка (служебной части) сообщения и определяют, в каком режиме должна работать аппаратура ПО. Информационную часть сообщения записывают в память бортового вычислителя и при необходимости выводят на экран блока регистрации данных.
Формирователи типа ретранслируемых сообщений позволяют обеспечить обмен цифровыми данными по каналу «оператор-пилот» (CPDLC) взамен существующей речевой информации. Они предназначены для выбора элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляют на блоке регистрации данных ПО и мониторе АРМ НК соответственно.
Сообщения с выходов приемников сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS записывают в память наземного и бортового вычислителей с привязкой к глобальному времени и используют для расчета навигационных характеристик и параметров движения каждого ПО. Принятые на НК навигационные сообщения от всех ПО обрабатывают в вычислителе и выводят на экран монитора АРМ.
Однако указанной выше системе присущи недостатки, связанные с круговой формой диаграммы направленности по азимуту бортовой антенны, вследствие чего резко снижается помехозащищенность и уменьшается дальность устойчивой связи.
Кроме того, оборудование системы состоит из аппаратных блоков с низкой аппаратурной надежностью, которое во время полета может выходить из строя и влиять на безопасность полетов.
Известна система радиосвязи с подвижными объектами [2]. Она отличается от упомянутой выше системы тем, что в ней дополнительно введены резервные наземные и бортовые средства связи, в том числе радиостанции ДКМВ дальней связи. Система радиосвязи с подвижными объектами [2] имеет в своем составе N подвижных объектов (ПО), связанных каналами MB радиосвязи «Воздух-Воздух» между собой, связанных каналами MB радиосвязи «Воздух-Земля» и каналами ДКМВ радиосвязи «Воздух-Земля» с М территориально разнесенными наземными комплексами, которые соединены между собой и с соответствующими диспетчерскими пунктами управления воздушным движением и авиалиниями через наземную сеть передачи данных.
В состав наземного комплекса связи входят наземные антенны MB и ДКМВ диапазонов, связанные соответственно с радиостанциями MB и ДКМВ диапазонов, подключенными двухсторонними связями через аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места, второй вход/выход которого подключен в управляющему входу радиостанции ДКМВ, третий вход/выход подключен к входу/выходу наземной системы связи, первый вход подключен к приемнику сигналов навигационных спутниковых систем (ГЛОНАСС/GPS), второй вход подключен к пульту управления АРМ, третий вход - к формирователю типа ретранслируемых сообщений, а выход - к монитору АРМ.
Подвижный объект оснащен бортовым комплексом связи, в состав которого входят всенаправленные бортовые антенны MB и ДКМВ диапазонов, подключенные к радиостанциям MB и ДКМВ диапазонов, соответственно, которые соединены двухсторонними связями через бортовую аппаратуру передачи данных с первым входом/выходом бортового вычислителя, второй вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом, третий вход/выход - к анализатору типа принимаемых сообщений, четвертый вход/выход - к управляющему входу/выходу радиостанции ДКМВ диапазона, входы - к бортовым датчикам, формирователю типа ретранслируемых сообщений, приемнику сигналов навигационных спутниковых систем, выход - к блоку регистрации данных.
Недостатки аналога также связаны с круговой формой диаграммы направленности по азимуту бортовых антенн, вследствие чего резко снижается помехозащищенность и уменьшается дальность устойчивой связи.
Кроме того, малый жизненный цикл бортовых радиостанций в условиях непрерывного повышения требований со стороны ИКАО к наращиванию функциональных возможностей систем связи, включенных в интегрированную систему связи, навигации, наблюдения для организации воздушного движения (CNS/ATM), обусловлен аппаратурным исполнением основных функций, включая частоты настройки радиосредств, полосы, спектральные маски фильтрации сигналов, физические уровни режимов передачи данных. Всякое новое требование к изменению функций или незначительная коррекция параметров вызывают необходимость аппаратурной и конструктивной переработки радиостанции, что дорого обходится как для разработчиков авионики, так и для ее эксплуатантов.
Наиболее близкой по назначению и большинству существенных признаков является система радиосвязи с подвижными объектами [3], которая принята за прототип. В системе радиосвязи с подвижными объектами, имеющей в своем составе М территориально разнесенных наземных комплексов и N подвижных объектов, связанных между собой каналами связи «Воздух-Воздух» MB диапазона, а с помощью каналов радиосвязи «Воздух-Земля» MB и ДКМВ диапазонов - с М наземными комплексами, НК связаны между собой через наземную сеть передачи данных, через которую обеспечивается непрерывный обмен данными. Каждый подвижный объект содержит бортовой вычислитель, первый вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом. В наземном комплексе содержатся наземные антенны MB и ДКМВ диапазонов, связанные соответственно с наземными радиостанциями MB и ДКМВ диапазонов, которые подключены двухсторонними связями через наземную аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места. Второй вход/выход АРМ подключен к входу/выходу НК для наземной сети передачи данных, третий вход/выход - к формирователю типа ретранслируемых сообщений, первый вход подключен к приемнику сигналов навигационных спутниковых систем (ГЛОНАСС/GPS), второй вход - к пульту управления АРМ, а выход - к монитору АРМ. На каждом подвижном объекте имеются b пар соединенных между собой бортовых всенаправленных широкодиапазонных антенно-фидерных устройств и широкодиапазонных радиочастотных модулей, входы/выходы которых в соответствии с эталонной моделью взаимодействия открытых систем двусторонними связями подключены к модулю физического уровня (МФУ). Входы/выходы МФУ подключены к вычислительному модулю связи, состоящему из последовательно соединенных двунаправленными связями модуля канального уровня, модуля маршрутизатора (ММ) и модуля интерфейса (МИ). Входы МИ подключены к бортовым датчикам, приемнику навигационной спутниковой системы, выход - к блоку регистрации данных, а первый вход/выход - к бортовому анализатору типа принимаемых сообщений, второй вход/выход - к бортовому формирователю типа ретранслируемых сообщений, третий вход/выход - к бортовому вычислителю. Кроме того, в каждом наземном комплексе четвертый вход/выход вычислителя автоматизированного рабочего места подключен к первому управляющему входу наземной радиостанции ДКМВ диапазона, а пятый вход/выход вычислителя автоматизированного рабочего места подключен к первому управляющему входу наземной радиостанции MB диапазона, где b - необходимое для получения заданных показателей надежности число пар соединенных между собой бортовых всенаправленных широкодиапазонных антенно-фидерных устройств и широкодиапазонных радиочастотных модулей.
Недостатки прототипа также связаны с круговой формой диаграммы направленности по азимуту бортовых широкодиапазонных антенно-фидерных устройств, вследствие чего резко снижается помехозащищенность и уменьшается дальность устойчивой связи по сравнению с прямой (оптической) видимостью.
Технической задачей, на решение которой направлено заявляемое изобретение, является повышение помехозащищенности системы и увеличение дальности устойчивой связи, а именно создание бортовой радиотехнической системы, определяющей направление на источник помех и корректирующей в соответствии с этим форму диаграммы приемной антенны в направлениях на помехоноситель и вызываемого абонента.
Указанный технический результат достигается тем, что в известной системе радиосвязи с подвижными объектами, состоящей из М территориально разнесенных наземных комплексов связи и N подвижных объектов, связанных между собой каналами связи «Воздух-Воздух» MB диапазона, а каналами радиосвязи «Воздух-Земля» MB и ДКМВ диапазонов - с М наземными комплексами, которые соединены между собой и с внешними абонентами через наземную сеть передачи данных, каждый подвижный объект содержит n бортовых широкодиапазонных антенн, соединенных непосредственно с n бортовыми широкодиапазонными радиочастотными приемо-передающими модулями, модуль физического уровня подключен двухсторонними связями через последовательно соединенные модуль канального уровня, модуль маршрутизатора и модуль интерфейсов к бортовому вычислителю, имеющему двунаправленный интерфейс бортовой системы управления подвижным объектом, входы модуля интерфейсов подключены к бортовым датчикам, приемнику сигналов навигационной спутниковой системы, выход модуля интерфейсов подключен к блоку регистрации данных, второй вход/выход модуля интерфейсов подключен к бортовому анализатору типа принимаемых сообщений, третий вход/выход - к бортовому формирователю типа ретранслируемых сообщений, а каждый наземный комплекс содержит наземные антенны MB и ДКМВ диапазонов, связанные соответственно с наземными радиостанциями MB и ДКМВ диапазонов, подключенными двухсторонними связями через наземную аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), второй вход/выход которого подключен к входу/выходу НК для наземной сети передачи данных, третий вход/выход - к формирователю типа ретранслируемых сообщений, четвертый и пятый входы/выходы - к вторым входам/выходам наземных радиостанций MB и ДКМВ диапазонов соответственно, первый вход вычислителя АРМ подключен к наземному приемнику сигналов навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ, на каждом ПО введены n фазовращателей, подключенных двухсторонними связями как к соответствующим входам/выходам n бортовых широкодиапазонных радиочастотных приемо-передающих модулей, так и к n входам/выходам модуля физического уровня, управляющие входы/выходы n фазовращателей подключены двухсторонними связями к соответствующим n входам/выходам бортового вычислителя.
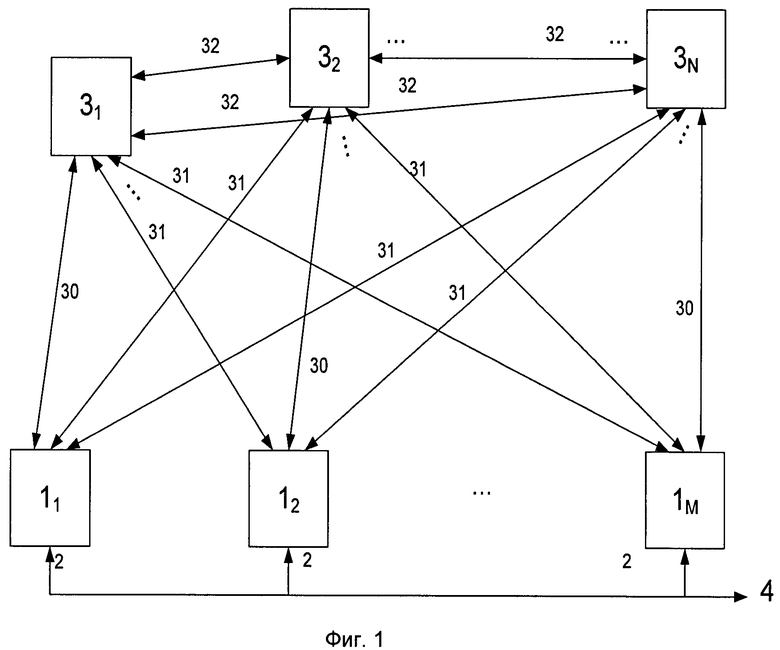
Структурная схема заявляемой системы радиосвязи с подвижными объектами представлена на фиг.1, где введены обозначения:
1 - наземный комплекс связи (НК);
2 - вход/выход НК 1 для наземной сети передачи данных;
3 - подвижный объект (ПО), оснащенный новым бортовым комплексом связи, структурная схема которого приведена на фиг.2;
4 - вход/выход наземной сети передачи данных, которая условно показана на фиг.1 в виде линии.
Система радиосвязи с ПО содержит М территориально разнесенных наземных комплексов 1, структурная схема которых приведена на фиг.3, и N подвижных (воздушных) объектов 3, оснащенных бортовыми комплексами связи, структурная схема которых представлена на фиг.2, связанных между собой каналами 32 связи «Воздух-Воздух» MB диапазона, а с помощью каналов 30 радиосвязи «Воздух-Земля» MB диапазона и каналов 31 ДКМВ диапазона - с М наземными комплексами 1, которые объединены между собой и наземными пользователями, не указанными на фиг.1, с помощью своих входов/выходов 2 НК и входов/выходов 4 наземной сети передачи данных.
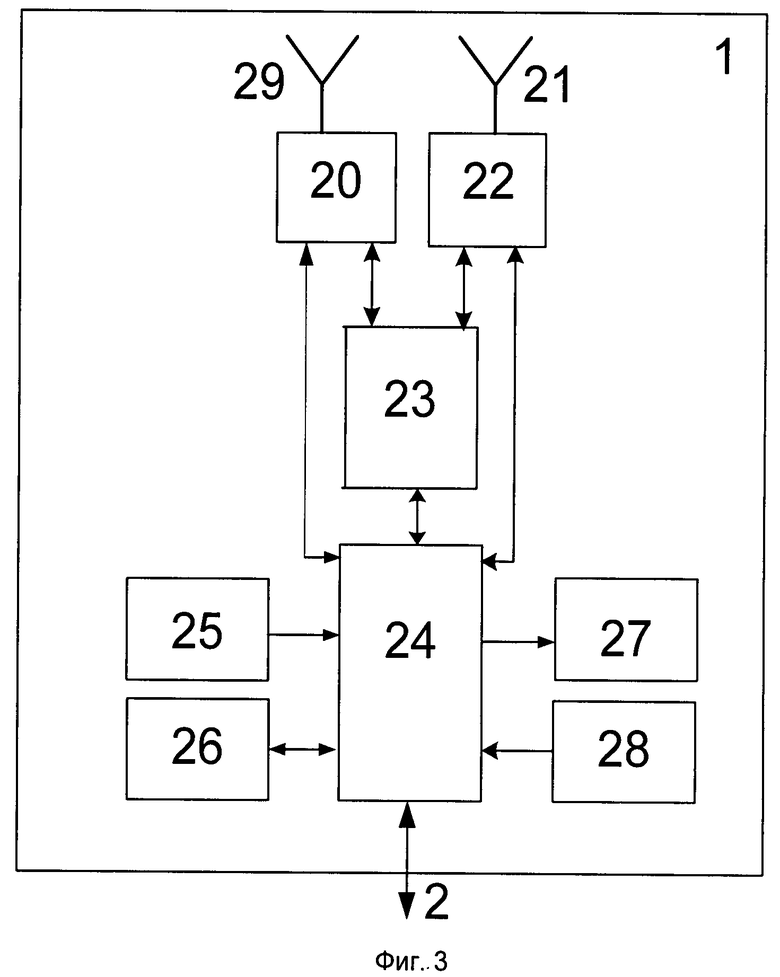
Структурная схема бортового оборудования подвижного объекта 3 заявляемой системы радиосвязи с подвижными объектами, приведена на фиг.2, где введены обозначения:
5 - бортовой вычислитель;
6 - бортовые датчики;
7 - бортовой приемник сигналов глобальной навигационной спутниковой системы ГЛОНАСС/GPS с антенной;
8 - блок регистрации данных;
9 - бортовой анализатор типа принимаемых сообщений;
10 - бортовой формирователь типа ретранслируемых сообщений;
11 - вычислительный модуль связи (ВМС);
12 - модуль интерфейсов с бортовым оборудованием (МИ);
13 - модуль маршрутизации (MM);
14 - модуль канального уровня (МКУ);
15 - модуль физического уровня (МФУ) (цифровой обработки сигналов);
16 - n бортовых широкодиапазонных радиочастотных приемопередающих модулей (ШД РППМ);
17 - n бортовых широкодиапазонных антенн (ШД А);
18 - двунаправленная шина системы управления подвижным объектом;
19 - n фазовращателей.
На фиг.2 приведены для примера 3 из n связанных между собой узлов 16, 17 и 19.
Причем, n ШДА 17 подключены непосредственно (без антенно-фидерного тракта) к n ШД РППМ 16, которые через n фазовращателей связаны с соответствующими входами/выходами модуля 15 физического уровня. МФУ 15 имеет двухсторонний цифровой интерфейс с модулем 14 канального уровня, связанным двухсторонним цифровым интерфейсом с модулем 13 маршрутизации, подключенным двухсторонним цифровым интерфейсом к модулю 12 интерфейсов, входы которого подключены к бортовым датчикам 6, приемнику 7 сигналов навигационной спутниковой системы. Выход МИ 12 подключен к блоку 8 регистрации данных, второй вход/выход его подключен к бортовому анализатору 9 типа принимаемых сообщений, третий вход/выход к бортовому формирователю 10 типа ретранслируемых сообщений, четвертый вход/выход к бортовому вычислителю 5, связанному с помощью двунаправленного интерфейса 18 с бортовой системой управления ПО 3, не показанной на фиг.2.
Структурная схема наземного комплекса 1 заявляемой системы радиосвязи с подвижными объектами представлена на фиг.3, где обозначено:
20 - наземная радиостанция MB диапазона;
21 - наземная антенна ДКМВ диапазона;
22 - наземная радиостанция ДКМВ диапазона;
23 - наземная аппаратура передачи данных (АПД);
24 - вычислитель автоматизированного рабочего места (АРМ);
25 - наземный приемник сигналов глобальных навигационных спутниковых систем с антенной;
26 - формирователь типа ретранслируемых сообщений;
27 - монитор АРМ;
28 - пульт управления АРМ;
29 - наземная антенна MB диапазона;
2 - вход/выход НК 1 для наземной сети передачи данных.
В НК 1 наземные антенны 29 MB и 21 ДКМВ диапазонов связаны соответственно с радиостанциями 20 MB и 22 ДКМВ диапазонов, подключенными двухсторонними связями через аппаратуру передачи данных 23 к первому входу/выходу вычислителя 24 автоматизированного рабочего места, второй вход/выход которого подключен к входу/выходу 2 НК 1 для наземной сети передачи данных, третий вход/выход - к формирователю 26 типа ретранслируемых сообщений, четвертый вход/выход - к радиостанции 22 ДКМВ диапазона, пятый вход/выход - к радиостанции 20 MB диапазона, первый вход вычислителя АРМ подключен к приемнику 25 сигналов навигационных спутниковых систем, например ГЛОНАСС/GPS, второй вход - к пульту 28 управления АРМ, а выход - к монитору 27 АРМ.
Система радиосвязи с подвижными объектами работает следующим образом. Передачу данных в MB диапазоне с НК 1 осуществляют по цепочке последовательно соединенных первого ПО 3, второго ПО 3 и далее до N-го ПО 3, а передачу данных с N-го ПО 3 на НК 1 осуществляют в обратном порядке. Передачу данных в ДКМВ диапазоне с ПО 3 осуществляют на тот наземный комплекс 1, качество приема маркера которого является наилучшим или приемлемым для данного подвижного объекта 3. Наземную сеть передачи данных подключают двухсторонними интерфейсами 2 к каждому из М разнесенных территориально НК 1. Таким образом, наземной сетью передачи данных по информационному взаимодействию объединяют между собой все НК 1 и обеспечивают соединение каждого НК 1 с наземными пользователями системы радиосвязи.
При отсутствии помех алгоритм обмена данными в заявляемой системе радиосвязи с ПО заключается в том, что в ней проводят следующие операции:
- назначают каждому НК 1 на временной интервал длительностью 1-2 часа активную ДКМВ частоту из набора разрешенных частот ДКМВ связи из общего списка частот, оптимальную по условиям распространения радиоволн и электромагнитной совместимости для данного временного интервала, отличающуюся от активных частот всех других НК 1 системы связи. Доводят номер активной частоты вместе с интервалом времени ее активизации до каждого НК 1 через наземную сеть передачи данных, реализуя, таким образом, протокол множественного доступа с частотным разделением (FDMA);
- определяют каждой разрешенной ДКМВ частоте свой временной сдвиг первого кадра протокола множественного доступа к каналу с временным разделением (TDMA) относительно ведущего кадра, привязанного, например, к 00 час: 00 мин: 00 сек универсального координированного времени UTC для того, чтобы сигналы маркеров на разных частотах излучались НК 1 в разнесенных временных слотах для уменьшения времени анализа качества маркеров, проводимого каждым подвижным объектом 3;
- разрабатывают системную таблицу ДКМВ связи, в которой указывают список М наземных комплексов связи 1 с их адресами, координатами, поддерживаемыми ими режимами работы и набором разрешенных частот с указанными сдвигами первого кадра каждой частоты;
- доводят системную таблицу ДКМВ связи до всех НК 1 и всех ПО 3 по наземной сети передачи данных и радиоканалам связи;
- разрабатывают для обеспечения передачи данных по MB каналу список частотной поддержки MB связи, в котором указывают список М наземных комплексов связи 1 с их адресами, координатами, поддерживаемыми ими режимами работы в MB канале связи, наборами разрешенных для каждого НК 1 частот MB связи, доводят список частотной поддержки до каждого ПО 3 через систему наземной связи и радиоканалам связи;
- осуществляют на каждом НК 1 обмен пакетными данными через наземную сеть передачи данных с пользователями системы, а также с другими (М-1) НК1;
- реализуют в наземной аппаратуре передачи данных 23 протоколы обмена данными в ДКМВ и MB каналах физического уровня (модемов-кодеков), канального и сетевого уровня, например, в соответствии с ARINC 618, 631, 635, 750, DO-224, ED-108 в режимах HFDL, VDL-1 (ACARS), VDL-2, VDL-4;
- разбивают для обеспечения ДКМВ связи время использования каждого ДКМВ частотного канала на временные кадры для реализации протокола множественного доступа к каналу с временным разделением (TDMA). В первом слоте каждого кадра излучают сигнал маркера, содержащий, например, квитанции на все сообщения, принятые НК 1 от разных ПО 3 в предыдущих двух кадрах, активные частоты двух соседних НК 1, версию базы данных (системной таблицы), назначения использования слотов с 4-го по 13-тый текущего кадра и слотов 2-го и 3-го следующего кадра, а также флаг занятости канала. В конце каждого кадра для каждого слота следующего кадра производят, например, назначение его использования для передачи с НК 1 или для передачи с конкретного борта (ПО 3) по его предварительному запросу слота доступа, или для передачи с любого борта ПО 3 в режиме случайного доступа;
- осуществляют обмен пакетными данными «Воздух-Земля» на каждом активном ДКМВ канале с множественным доступом подвижных объектов 3 при заданной интенсивности потока сообщений;
- производят излучение сигналов маркеров с заданным периодом для обеспечения MB связи на каждом НК 1 на каждой разрешенной MB частоте. Сигналы маркеров разносят во времени, чтобы на ПО 3 можно было раздельно оценить качество сигналов разных НК 1 и выбрать НК 1 для связи;
- выбирают лучшую частоту связи и регистрируют ПО 3 на выбранных частотах MB и ДКМВ каналов на каждом ПО 3 по результатам оценки качества принятых сигналов маркеров разных НК 1 для каждого диапазона волн;
- осуществляют в MB диапазоне обмен пакетными данными «Воздух-Земля» на активном MB канале, например, в режиме множественного доступа к каналу с прослушиванием несущей (CSMA) или на активном канале «Воздух-Воздух» и «Воздух-Земля» в режиме множественного доступа к каналу с временным разделением и с самоорганизацией (STDMA);
- инициируют в ДКМВ диапазоне на каждом подвижном объекте процедуру поиска частоты при включении оборудования или после разъединения линии, если ПО 3 не может больше обнаружить маркеры от наземного комплекса 1 на текущей частоте. После автовыбора частоты и регистрации на новом канале производят обмен пакетными данными в режиме TDMA с НК 1, на котором ПО 3 зарегистрирован, до тех пор пока качество ДКМВ радиоканала «Воздух-Земля» превышает допустимый уровень. При ухудшении качества ДКМВ радиоканала ниже допустимого уровня выбирают новый ДКМВ радиоканал и соответствующий ему НК 1, независимо от местоположения НК 1 и регистрируют ПО 3 на новом ДКМВ радиоканале;
- инициируют в MB диапазоне на каждом подвижном объекте процедуру поиска частоты при включении оборудования или после разъединения линии, если ПО 3 не может больше обнаружить пакеты сообщений от наземного комплекса 1 на текущей частоте или если подуровень управления протоколом доступа к каналу (MAC) индицирует, что текущая частота перегружена. При этом настраивают ШД РППМ на альтернативную (резервную) частоту, используя данные из списка частотной поддержки, и если качество сигналов маркеров на новой частоте удовлетворительно, регистрируют ПО 3 на новой частоте;
- реализуют в ПО 3 и НК 1 следующие процедуры управления связностью линии передачи данных MB диапазона:
- идентификацию НК 1;
- начальную установку линии;
- модификацию параметров линии;
- «хэндофф», инициируемый ПО 3;
- «хэндофф», инициируемый НК 1 по запросу ПО 3;
- «хэндофф», инициируемый НК 1;
- «хэндофф», инициируемый ПО 3 по запросу НК 1;
- широковещательный «хэндофф» по запросу НК 1;
- автонастройку;
- формируют в бортовых конечных системах ПО 3 (5, 18) пакетное сообщение, содержащее адрес получателя и адрес отправителя (адрес ПО 3), и передают через модуль 12 интерфейса в бортовой модуль 13 маршрутизатора, где его упаковывают в виде пакета ISO 8208 и затем передают в модуль 14 канального уровня, где его преобразуют в пакет канального уровня сети передачи данных, содержащий проверочные последовательности, вычисленные с помощью избыточного циклического кода (CRC). Полученные сообщения передаются в модуль 15 физического уровня, где осуществляют, например, операции:
- сверточное кодирование данных для прямой коррекции ошибок;
- перемежение данных для борьбы с пакетированием ошибок из-за замираний;
- преобразование последовательности из трех или двух или одного бита (в зависимости от скорости передачи данных и вида модуляции, например 2-ФМн, 4-ФМн или 8-ФМн, соответственно) в значения фазы сигнала поднесущей выбранной частоты;
- скремблирование данных для выравнивания спектра передаваемого сигнала;
- формирование ключевой синхронизирующей последовательности и преамбулы, содержащей известную последовательность для обучения адаптивного демодулятора, и информацию о скорости передачи данных и глубине перемежения;
- формирование коротких обучающих последовательностей, которые вставляют в поток передаваемых данных пользователя, для реализации адаптивных методов приема сообщения;
- формирование заданной формы огибающей каждого символа для обеспечения заданной спектральной маски излучаемого сигнала;
- формирование ДКМВ сигнала, например, с верхней боковой полосой с подавленной несущей с классом излучения 2K80J2DEN.
Сформированный для передачи ДКМВ сигнал, например, многопозиционной фазовой манипуляции (M-PSK, М=2, 4 или 8) с выхода модуля 15 физического уровня с требуемой фазой, заданной соответствующим узлом 19, подают на входы n ШД РППМ 16, где его усиливают до требуемого уровня мощности, затем на n широкодиапазонных антенн 17 и по ДКМВ радиоканалу 31 передают на наземный комплекс 1, на котором зарегистрирован ПО 3. При наличии помехи проводятся следующие процедуры:
- определяется направление на источник помех путем сканирования пространства с помощью управляющих сигналов бортового вычислителя, узлов 19, 16 и 17 в интервалах времени, когда отсутствует обмен данными;
- определяются координаты и параметры движения источника помех с помощью известных в радиолокации методов [4] и передаются соответствующие сообщения на НК (через него и наземную сеть передачи данных на другие НК и подвижные объекты);
- если позволяет ситуация, то осуществляется перевод узлов 15 на другую резервную рабочую частоту или включается режим формирования псевдослучайной рабочей частоты;
- одновременно с помощью управляющих сигналов бортового вычислителя 5 корректируется форма диаграммы направленности антенной решетки с обеспечением минимального усиления в направлении на источник помех;
- для повышения достоверности передачи данных с помощью узлов 5, 11, 16, 17 и 19 формируется луч узконаправленной (игольчатой) формы в направлении абонента, с которым проводится или предстоит провести сеанс связи.
На НК 1 ДКМВ сигнал от ДКМВ антенны 21 подают на наземную радиостанцию 22 ДКМВ диапазона, работающую, например, в симплексном режиме в соответствии с указанным протоколом TDMA. С выхода радиостанции 22 сообщение подают на вход аппаратуры 23 передачи данных, где его демодулируют, дескремблируют, деперемежают, декодируют с прямой коррекцией ошибок, проверяют на наличие не исправленных декодером ошибок. В случае отсутствия ошибок сообщение упаковывают в пакет, например, в соответствии с ISO 8208 и выдают на вход вычислителя АРМ 24, где его упаковывают в пакет, предназначенный для передачи, например, по протоколу Х.25 по наземной сети передачи данных потребителям информации.
При передаче пакета по протоколу Х.25 по наземной сети передачи данных в обратном направлении (от потребителя информации) через НК 1 к ПО 3 вначале его обрабатывают в вычислителе АРМ 24 наземного комплекса 1, где из него формируют пакет, например, по ISO 8208, необходимый для передачи в линии передачи данных «Воздух-Земля». С выхода вычислителя АРМ 24 сообщение передают в аппаратуру передачи данных 23, где его упаковывают в пакет канального уровня, содержащий проверочные последовательности, вычисленные с помощью избыточного циклического кода (CRC), и осуществляют кодирование, перемежение данных, модуляцию, скремблирование данных, формирование ключевой синхронизирующей последовательности и преамбулы, содержащей известную последовательность для обучения адаптивного демодулятора, и информацию о скорости передачи данных и глубине перемежения, а также формирование коротких обучающих последовательностей, которые вставляют в поток передаваемых данных пользователя для реализации адаптивных методов приема сообщения, формирование заданной формы огибающей каждого символа типа приподнятого косинуса для обеспечения заданной спектральной маски излучаемого сигнала.
Сформированный в АПД 23 сигнал подают на вход ДКМВ радиостанции 22, где его используют для формирования ДКМВ радиосигнала, усиливают до требуемого уровня мощности, затем через ДКМВ антенну 21 передают по ДКМВ радиоканалу 31 на ПО 3.
На ПО 3 ДКМВ радиосигнал через ШД А 17 поступает на ШД РППМ 16. Затем через фазовращатель 19 сообщение подают на соответствующий вход МФУ 15, где его демодулируют, дескремблируют, деперемежают, декодируют с прямой коррекцией ошибок и выдают в МКУ 14, где его проверяют на наличие не исправленных декодером ошибок и в случае отсутствия ошибок упаковывают, например, в пакет ISO 8208 и выдают на вход ММ 13 для преобразования в пакет, предназначенный для передачи через МИ 12 к бортовым пользователям (блокам 5, 8, 9 или на шину 18).
В процессе обмена пакетными данными в MB диапазоне с наземными пользователями на каждом ПО 3 пакетное сообщение формируют в бортовой конечной системе (18, 5). Сообщение, содержащее адрес получателя и адрес отправителя (адрес ПО 3), передают от бортового вычислителя 5 через модуль 12 интерфейса в модуль 13 маршрутизатора, где его упаковывают, например, в пакет ISO 8208 сетевого (пакетного) уровня. Затем сообщение передают в модуль 14 канального уровня, где его упаковывают в пакет канального уровня, содержащий проверочные последовательности, вычисленные с помощью избыточного циклического кода (CRC), и передают в модуль 15 физического уровня, где осуществляют известные операции:
- кодирование данных, например кодом Рида-Соломона для прямой коррекции ошибок;
- перемежение данных для борьбы с пакетированием ошибок из-за замираний и импульсных помех;
- преобразование последовательности, например, трех бит данных в значение фазы символа сигнала, относительное кодирование фазы соседних символов для реализации относительной 8-ми позиционной фазовой манипуляции (D8PSK);
- скремблирование данных для выравнивания спектра передаваемого сигнала;
- формирование ключевой синхронизирующей последовательности и преамбулы, содержащей известную последовательность для обучения адаптивного демодулятора;
- формирование заданной формы огибающей каждого символа, например, типа приподнятого косинуса с α=0,6 для обеспечения заданной спектральной маски излучаемого сигнала;
- формирование MB сигнала, наример, с классом излучения 14KOG1DE - с полосой, занимаемой сигналом 14 кГц, фазовой модуляцией (G) несущей одного цифрового канала без поднесущей, передачей данных (D) и многоусловным кодированием (Е).
Сформированный для передачи радиосигнал, например, 8-ми позиционной относительной фазовой манипуляции (D8PSK) с выхода модуля 15 через n фазовращателей 19 подают на входы n широкодиапазонных радиочастотных приемо-передающих модулей 16, где его усиливают до требуемого уровня мощности и через n широкодиапазонных антенн 17 и MB радиоканал 30 передают на наземный комплекс 1, на котором зарегистрирован ПОЗ.
На каждом НК 1 MB радиосигнал от MB антенны 29 подают на наземную радиостанцию 20 MB диапазона, затем сообщение подают на вход аппаратуры 23 передачи данных, где демодулируют, дескремблируют, деперемежают, декодируют с прямой коррекцией ошибок, проверяют на наличие не исправленных декодером ошибок. В случае отсутствия ошибок из него формируют, например, пакет ISO 8208 и выдают на вход вычислителя 24 АРМ, где его упаковывают в пакет, предназначенный для передачи по наземной сети передачи данных потребителям, например по протоколу Х.25.
При передаче пакета в обратном направлении (от потребителей к ПО 3) сообщение по входу/выходу 2 НК 1 передают в вычислитель 24 АРМ НК 1, где формируют пакет, например, в соответствии с ISO 8208, который передают в аппаратуру передачи данных 23, где его упаковывают в пакет канального уровня, содержащий проверочные последовательности, вычисленные с помощью избыточного циклического кода (CRC), и осуществляют стандартные рассмотренные в МФУ 15 процедуры.
Сформированный для передачи, например, сигнал 8-ми позиционной относительной фазовой манипуляции (D8PSK) с выхода АПД 23 подают на вход радиостанции 20, где его усиливают до требуемого уровня мощности и через антенну 29 передают по радиоканалу в направлении на выбранного абонента с помощью сформированной узлами 5, 11, 16, 17 и 19 диаграммы направленности.
На ПО 3 MB сигнал от ШД А 17 поступает на ШД РППМ 16, с выхода которого сообщение через фазовращатель 19 подают на вход МФУ 15, где его демодулируют, дескремблируют, деперемежают, декодируют с прямой коррекцией ошибок, и затем выдают в МКУ 14, где его проверяют на наличие не исправленных декодером ошибок. В случае отсутствия ошибок сообщение упаковывают в пакет, например, в соответствии с ISO 8208 и выдают на вход ММ 13, где его формируют для передачи через МИ 12 бортовым пользователям (блокам 5, 8, 9 или на шину 18).
В системе разрабатывают системную таблицу связи, содержащую координаты НК 1, их адреса, режимы передачи данных, которые они поддерживают в MB и ДКМВ диапазонах, разрешенные частоты связи для разных режимов обмена данными MB и ДКМВ диапазонов, временное расписание излучения сигналов маркеров на каждой частоте и доводят до каждого НК 1 и ПО 3 (во время предполетной подготовки) по наземной сети передачи данных.
Частоты связи MB диапазона, заданные в списке частотной поддержки, являются активными. На каждом НК 1 на активной частоте связи излучают сигналы маркеров в с заданным интервалом, согласно протоколу работы линии передачи данных. В сигналы маркеров ДКМВ вводят информацию о версии системной таблицы (версии базы данных), об активных частотах двух соседних НК 1, назначения слотов для нового кадра, квитанции на все сообщения от ПО 3, принятые в предыдущем кадре, флаг занятости канала. Первый слот отводят под излучение маркера с НК 1.
На ПО 3 начинают анализировать сигналы маркеров MB и ДКМВ диапазонов, находясь на стоянке в зоне аэропорта после включения питания и проведения автоматического встроенного контроля технической исправности. Независимо от функционирования канала связи MB диапазона ПО 3 постоянно поддерживает канал связи ДКМВ диапазона с тем НК 1, качество канала с которым является наилучшим или приемлемым.
Во время полета на каждом ПО 3 обеспечивают автоматический выбор рабочей частоты из списка разрешенных частот, регистрацию на НК 1 на выбранном канале, случайный и резервированный доступ к каналу связи в режиме множественного доступа с временным разделением, обмен данными с территориально разнесенными наземными комплексами 1, объединенными с помощью наземной сети передачи данных в единую систему.
В системе радиосвязи ведут обмен навигационными и другими данными по радиолинии связи MB диапазона между наземным комплексом 1 и подвижными объектами 3, находящимися в пределах радиогоризонта НК 1. Принимаемые наземной радиостанцией 22 из канала «Воздух-Земля» сообщения через аппаратуру 23 передачи данных подают в наземный вычислитель 24 АРМ, который может быть выполнен на базе серийной ПЭВМ. В нем в соответствии с принятым в системе протоколом обмена проводят идентификацию (сравнение) принятого в сообщении адреса ПО 3 с адресами подвижных объектов, хранящимися в памяти вычислителя 24 АРМ. При совпадении адреса подвижного объекта 3 с хранящимся в списке адресом информацию о местоположении, параметрах движения ПО 3 и состоянии его датчиков запоминают в вычислителе 24 АРМ. По запросу с ПО 3 с НК 1 могут быть на него переданы сведения о местоположении, параметрах движения выбранного для связи подвижного объекта 3. При отсутствии обмена данными с помощью управляющих сигналов бортового вычислителя 5 и узлов 16, 17 и 19 обеспечивается сканирование в рабочем диапазоне частот лучами диаграммы направленности антенной решетки, созданной из узлов 17, для определения направления на источники сигналов и помех. При обнаружении помехи с помощью управляющих сигналов бортового вычислителя 5 и узлов 16, 17 и 19 автоматически в этом направлении формируется минимум коэффициента усиления антенной решетки. В режиме симплексной связи в узле 16 приемное устройство на время передачи блокируется, а в режиме дуплексной связи работа системы осуществляется на разных частотах. В наземном вычислителе 24 АРМ решают задачи обеспечения постоянной устойчивой радиосвязи со всеми N ПО 3, и на основе информации о точном местонахождении всех ПО 3 и параметрах их движения осуществляют операции запоминания сообщений в наземном вычислителе 24 АРМ и вывод необходимых данных на экран монитора 27 АРМ НК 1 в виде, удобном для восприятия оператором (диспетчером).
При выходе за пределы радиогоризонта НК 1 хотя бы одного из ПО 3 или приближении к границе зоны устойчивой радиосвязи наземный комплекс 1 определяет программно один из ПО 3, которого назначает первым ретранслятором сообщений. При постоянном изменении дальности между ПО 3 и НК 1 в качестве ретранслятора в течение определенного времени может быть назначен любой из N ПО 3, местоположение которого известно и оптимально по отношению к НК 1 и всем остальным ПО 3. По анализу местоположения и параметров движения остальных ПО 3 определяют оптимальные пути доставки сообщений к удаленному от НК 1 за радиогоризонт подвижному объекту 3 - получателю сообщения с использованием узкой формы диаграммы направленности антенной решетки. Сообщение от НК 1 через последовательную цепочку, состоящую при необходимости из нескольких (от 1 до (N-1)) ПО 3, может быть доставлено к требуемому ПО 3 - получателю. Для этого на НК 1 в формирователе 26 типа ретранслируемых сообщений в заранее определенные разряды передаваемой кодограммы закладывают адрес ПО 3, назначенного первым ретранслятором, при необходимости адреса других подвижных объектов 3 - ретрансляторов, обеспечивающих заданный трафик сообщения, и адрес ПО 3 - получателя. Принятые и обработанные на ПО 3 в устройствах 17, 16, 19, 15, 14, 13, 12 сообщения передают в блок 9 анализа типа сообщений. Если сообщение предназначено для данного ПО 3, то после анализа решается вопрос о направлении данных по двунаправленной шине 18 на систему управления ПО 3 или о передаче сообщения в режиме ретрансляции к соседнему ПО 3 путем формирования в пространстве соответствующей формы диаграммы направленности. Для исключения коллизий минимизируют число разрядов в передаваемом сообщении и осуществляют ретрансляцию данных последовательно во времени.
Для каждого ПО 3 траектории движения соседних ПО 3 при необходимости отображают на экране бортового блока 8 регистрации данных, а на экране монитора 27 АРМ - траектории всех ПО 3 в районе действия НК 1 с помощью характеризующих предыдущее местоположение ПО 3 отметок, формируемых вычислителями 5 и 24. По мере движения ПО 3 устаревшие отметки стираются. Во время предполетной подготовки каждого подвижного объекта 3 с помощью интерфейса 18 осуществляют загрузку в память бортового вычислителя 5 необходимых данных в виде системной таблицы, содержащей списки адресов, координат наземных комплексов и назначенных им частот связи. В НК 1 системные таблицы загружаются с помощью входа/выхода 2 НК 1 для наземной сети передачи данных.
Принимаемую на ПО 3 информацию отображают на экране блока 8 регистрации данных в виде буквенно-цифровых символов или в виде точек и векторов. Сообщения в соответствии с протоколом обмена ставят в очередь соответствующей категории срочности. В вычислителях 5 и 24 определяют время «старения» информации, и если сообщение в течение промежутка времени, равного времени «старения», не было передано в канал связи, то его «стирают» и посылают запрос на передачу нового сообщения.
Для того чтобы минимизировать вероятность коллизий случайного доступа, не создавать помех текущей передаче сообщения, применяют процедуры, например, как в режиме VDL-2, а именно реализуют протокол множественного доступа к каналу с прослушиванием несущей (CSMA). Для этого в АПД 23, вычислителе 24 НК 1 и модулях 15 физического уровня и 14 канального уровня ПО 3 перед передачей каждого сообщения осуществляют прослушивание канала (контроль занятости несущей) на предмет обнаружения преамбулы, заголовка или полезной части сообщений. Подготовленное сообщение с ПО 3 передают только в том случае, когда радиоканал свободен. Для того чтобы разнести во времени моменты выхода на связь разных подвижных объектов 3 и НК 1, когда после занятости канала все корреспонденты обнаружили, что радиоканал свободен, в вычислителе 24 НК 1 и в модуле 14 канального уровня ПО 3 формируют псевдослучайные задержки передачи сообщений от подвижных объектов 3 (для каждого ПО 3 своя) и от НК 1. На каждом из ПО 3 время окончания сигнала несущей частоты в радиоканале и импульсы синхронизации используют для инициализации расчета в модуле 14 канального уровня интервала времени собственной передачи и внутри этого интервала с помощью модуля 15 физического уровня, узлов 19, 16 и 17 ПО 3 осуществляют передачу собственного пакета данных.
Часть слотов кадра отводят для случайного доступа. Если передают пакет с ПО 3 в слоте случайного доступа и в маркере следующего кадра не обнаруживают положительной квитанции на эту передачу, то принимают решение о том, что произошла коллизия случайного доступа и инициируют на ПО 3 алгоритм выхода из коллизии, при котором вводят псевдослучайную задержку повторной передачи пакета с борта, выраженную в слотах. Это приводит к уменьшению вероятности повторной коллизии.
Сообщения о местоположении ПО 3 и параметрах его движения с выходов приемников 7 и 25 сигналов навигационных спутниковых систем, например ГЛОНАСС/GPS, записывают в память вычислителей 5 и 24 с привязкой к глобальному времени [3, 5, 6]. Точная синхронизация слотов, используемых для обмена данными между абонентами системы, и их запланированное использование для передачи известно каждому пользователю по отношению к окружающим пользователям с известными координатами. Управление протоколом доступа к каналу на каждом подвижном объекте 3 осуществляют в модуле 14 канального уровня, а на НК 1 - в аппаратуре передачи данных 23 и вычислителе АРМ 24.
Время вхождения в связь каждого ПО 3 можно сократить, если предусмотреть передачу специальных сообщений от НК 1, содержащих информацию о свободных слотах доступа в зоне его обслуживания. Поскольку НК 1 постоянно наблюдает за каналом, он имеет полную информацию о динамике протокола доступа к каналу. Назначение слотов для ПО 3 наземным комплексом 1 позволит полностью избежать коллизий случайного доступа, а также уменьшить временные и вычислительные затраты ПО 3 на выбор слотов доступа к каналу. Если НК 1 зарезервирует несколько слотов в начале каждого кадра для передачи на ПО 3 информации о свободных слотах, то при заданном интервале слежения за ПО 3 НК 1 может обслуживать без взаимных помех большее число подвижных объектов.
В вычислителях 5 и 24 данные о местоположении ПО 3 используют для расчета навигационных характеристик и параметров движения выбранного для связи ПО 3. В зависимости от заданного интервала времени выдачи на НК 1 сообщений о местоположении ПО 3 в вычислителе 5 формируют соответствующее сообщение с привязкой к глобальному времени проведения измерения координат ПО 3. Это время используют в вычислителе 24 НК 1 для известной операции построения экстраполяционных отметок от ПО 3 [4]. Благодаря наземной сети передачи данных с входами/выходами 4, которая объединяет между собой все М НК 1, информация от удаленного на большие расстояния (до 4-6 тысяч км и более) ПО 3, оборудованного устройствами 14, 15, 16, 17 и 19 с функцией управления ДКМВ радиолинией, даже в сложной помеховой обстановке доводится до всех НК 1 системы радиосвязи, хотя удаленный ПО 3 держит связь только с одним НК 1, качество маркеров которого является наилучшим для ПО 3 на данный момент времени.
В модулях 14 и 15 ПО 3 и бортовом вычислителе 5 (через модули 13, 12 вычислительного модуля 11 связи) ПО 3 автоматически анализируются принимаемые сигналы маркеров от всех наземных комплексов 1 на всех частотах и выбирают лучшую частоту, например, по критерию максимума измеряемого демодулятором при приеме всего пакета отношения сигнал/помеха. По измеренному на выбранной частоте в модуле 15 отношению сигнал/помеха в модуле 14 вычислительного модуля 11 связи ПО 3 выбирают максимально допустимую скорость передачи данных, а также вид модуляции и кодирования. Оценка отношения сигнал/помеха осуществляется всеми НК 1 и ПО 3 системы каждый раз при приеме любого пакета сообщения. Величина выбранной максимальной допустимой скорости передачи данных сообщается на противоположную сторону в виде рекомендуемой скорости передачи данных. В наземной аппаратуре 23 передачи данных при работе на радиостанцию 22 ДКМВ диапазона и в бортовых модулях 15, 14 ПО 3 могут быть использованы известные алгоритмы высокоскоростных адаптивных модемов, рассчитанных на работу в каналах с многолучевостью, например алгоритм демодуляции с использованием эквалайзера с решающей обратной связью, субоптимальный алгоритм Витерби приема в целом с поэлементным принятием решения в условиях многолучевости, алгоритм максимального правдоподобия с идентификацией текущих параметров канала (импульсной характеристики канала) на основе методов стохастической аппроксимации и другие. Все используемые алгоритмы приема по помехоустойчивости должны удовлетворять требованиям, указанным, например, в ARINC 635.
Таким образом, каждый из ПО 3 может выходить на связь на нескольких рабочих частотах, известных всем участникам движения. Списки выделенных частот меняются в зависимости от времени года, а рабочая частота для каждого НК 1 из списка выделенных частот активизируется на каждый час или два часа времени суток. При движении ПО 3 выходит на связь, выбирая для связи тот НК 1, условия распространения радиоволн для связи с которым в данный момент времени являются оптимальными. При этом совсем не обязательно, чтобы выбранный НК 1 был ближайшим. Составленный таким образом канал связи между ПО 3 и наземным потребителем (источником) информации, как правило, будет включать бортовую сеть передачи данных и наземную сеть передачи данных, связанные между собой радиолиниями. Как только качество канала 31 связи деградирует ниже допустимого уровня, на борту с помощью узлов 5, 14 и 15 ПО 3 выбирают новую оптимальную рабочую частоту на основании анализа условий распространения радиоволн и новый, соответствующий ей НК 1. Таким образом, обеспечивают высокую (порядка 0,999) надежность связи при обмене данными с ПО 3, находящимися от НК 1 на расстояниях от нескольких сотен до 4-6 тысяч километров.
Синхронизация работы системы осуществляется на основе использования всеми участниками движения единого глобального всемирного координированного времени (UTC), получаемого от существующих объектов глобальной навигационной спутниковой системы с помощью приемников 7 и 25.
Для взаимодействия наземных комплексов 1, оконечных пользователей и ПО 3 используется наземная сеть передачи данных с входами/выходами 4 для НК 1. Она может быть реализована известными способами, например, при межсетевой работе НК 1 через центры коммутации пакетов в соответствии с протоколом Х.25 [5]. Соединения между НК 1 и центрами коммутации пакетов Х.25 (маршрутизаторами) могут обеспечиваться через специально выделенные или арендуемые каналы связи. Они позволят транслировать сообщение, адресованное наземным пользователем определенному ПО 3 на тот наземный комплекс 1, на котором данный ПО 3 «зарегистрирован» и где в данный момент времени обеспечиваются оптимальные условия ДКМВ приема. Система радиосвязи с ПО 3 работает в автоматическом режиме без вмешательства оператора на выбранных частотах из списка частот, назначенного при планировании связи. При передаче данных по ДКМВ линии каждый частотный канал используется, например, по протоколу множественного доступа с временным разделением. Время доступа к частотному каналу разбито на кадры, каждый их которых в свою очередь поделен на интервалы (слоты). Используются короткие пакеты сообщений длительностью менее длительности слота. Передача НК 1 широковещательного маркера на каждой активной частоте имеет свое смещение относительно начала ведущего кадра, указанное в системной таблице.
Основное преимущество использования введенного на ПО 3 устройства 19, совместно с устройствами 16, 15, 14, 13, 12, 5, основанными на принципах интегрированной модульной авионики, представленных, например, в [7, 8, 9] и методе «радио, задаваемого программой», состоит в высшем уровне конфигурируемости и гибкости защиты от помех, предоставляемом архитектурой. Высший уровень конфигурируемости, реализуемый в предлагаемом оборудовании ПО 3 - это полностью гибкие виды модуляции, протоколы уровня линии, сети, алгоритмы определения направления на источник помех и управления диаграммами направленности антенной решетки и пользовательские функции, возможность изменения вида модуляции, ширины полосы сигнала и центральной частоты по программе в широких пределах [7]. Благодаря заявленной системе появляется возможность создания (с помощью бортового вычислителя 5 и соответствующих модулей 15, 14 с широкодиапазонным радиочастотным приемо-передающим модулем 16) широкодиапазонного программируемого адаптивного комплекса связи нового типа, работающего совместно с широкодиапазонными антеннами 17, образующими антенную решетку как в MB, так и в ДКМВ диапазонах. Модуль 15 физического уровня ПО 3 содержит высокоскоростные с большим динамическим диапазоном АЦП и ЦАП и базируется на высокопроизводительных сигнальных процессорах, которые в цифровом виде реализуют большинство функций физического уровня, например, операции частотного преобразования, фильтрации, синтеза частот, приема радиосигналов. Он предназначен для формирования и обработки радиосигналов на физическом уровне (кодирования/декодирования, перемежения/деперемежения, скремблирования/дескремблирования данных, модуляции/демодуляции, реализации адаптивных методов передачи и приема сигналов, полосовой фильтрации, преобразования частоты и т.п.). Модуль 14 канального уровня обеспечивает протоколы выбора частот связи, составления линии связи, обмена данными уровня линии и доступа к подсети «Воздух-Земля», обмена с модулем 13 маршрутизации ПО 3, обеспечения отказоустойчивого режима работы и другие процедуры. Модуль 13 маршрутизации обеспечивает распределение сообщений «Воздух-Земля», принятых по MB и ДКМВ каналам, например, в виде пакетов ISO 8208, конечным потребителям на борту и в обратном направлении. Модуль 12 интерфейсов обеспечивает все необходимые интерфейсы с бортовым оборудованием, например, по протоколам ARINC 429, ARINC 664, ARINC 646 и другим.
При работе в помеховой обстановке с помощью фазовращателей 19, управляемых бортовым вычислителем 5, формируются нескольких отдельных лучей узконаправленной (игольчатой) формы и используется одновременно нескольких частот в каждом луче в направлении абонентов: соответствующего НК 1 или подвижного объекта, с которыми предстоит провести сеанс связи. Далее в зависимости от местоположения абонента (наземного комплекса с известными координатами или полученной по радиоканалам «Земля-Воздух» или «Воздух-Воздух» информации о местоположении и параметрах соответствующего ПО 3) данный луч за счет подачи сигналов управления от бортового вычислителя 5 в различные части антенной решетки, образуемой разнесенными по поверхности подвижного объекта 3 n бортовыми широкодиапазонными антеннами 17, направляется в сторону абонента. Число n выбирается с учетом формирования требуемой формы диаграммы направленности в заданном секторе или с возможностью переброски лучей вкруговую. Благодаря этому, появляются новые возможности системы радиосвязи и достигается сразу несколько преимуществ:
1. Появляется возможность использовать одновременно несколько частот в каждом луче, что многократно увеличивает производительность вычислительных средств ПО 3, как источника сообщений, и повышает скорость передачи данных.
2. Существенно уменьшается излучаемая мощность от подвижного объекта. Это связано с тем, что за счет повышения коэффициента усиления антенной решетки в направлении выбранного абонента требуется гораздо меньшая энергия на формирование и излучение радиосигналов в одном луче, так как обычная всенаправленная антенна излучает энергию в широком секторе.
3. Улучшаются характеристики качества предоставляемых системой услуг QoS, так как созданная с помощью управляющих сигналов бортового вычислителя 5 и узлов 16, 17 и 19 антенная решетка может адаптироваться к каждой конкретной ситуации, защититься от помех и передавать данные к соответствующему отдельному абоненту индивидуально. Таким образом, где бы абонент ни находился, в его сторону будет передан сигнал с достаточной мощностью, чтобы обеспечить необходимый уровень достоверности.
4. Повышается аппаратурная надежность бортового оборудования за счет снижения мощности передающих устройств узла 16 по сравнению с аналогичными узлами прототипа для получения одинакового уровня достоверности принимаемой информации, автоматического резервирования и реконфигурации узлов 16, 17 и 19.
5. Повышается дальность связи, эффективность использования частотного спектра за счет формирования нескольких отдельных лучей узконаправленной (игольчатой) формы и использования одновременно нескольких частот в каждом луче.
Узлы, каналы и шины 1-18, 20-32 одинаковые с прототипом. ШД А 17 и модули 16, 19, 15, 14 совместно с бортовым вычислителем 5 интегрируют функции адаптивных радиостанций MB и ДКМВ диапазонов, аппаратуры передачи данных (кодека, модема) с программной реализацией режимов работы аппаратуры (видов модуляции, кодирования) с возможностью введения новых режимов работы модулей программным, способом через шину 18, бортовой вычислитель 5 и соответствующие последовательно соединенные модули 12 и 13, входящие в вычислительный модуль 11 связи. Вычислительный модуль связи 11, входящий в состав ПО 3 (может быть выполнен, например, на микросхеме ADSP-21060), обеспечивает функциональное взаимодействие с бортовыми устройствами 5, 7, 8, 9, 10 и 15 и датчиками 6 событий.
Модуль 14 канального уровня предназначен для управления выбором частотных каналов, установлением линий связи и регистрацией на НК 1 для упаковки, распаковки сообщений, управления доступом к каналу, дополнительного кодирования/декодирования, например избыточным циклическим кодом CRC для обнаружения ошибок, не исправленных на физическом уровне, автоматического запроса повторения, криптозащиты на канальном уровне, управления изоляцией неисправностей и восстановлением работоспособности за счет реконфигурации бортовой части системы и т.п. Он реализуется, например, на плате процессорной 5066-586-133MHz-1 MB, 2 MB Flash CPU Card фирмы Octagon Systems.
Модуль 13 маршрутизатора взаимодействует с модулем 14 канального уровня на уровне доступа к подсети, например, по протоколу ISO 8208 (в среде ATN) в соответствии с заданными режимами передачи данных и может быть реализован на универсальном вычислителе типа платы процессорной 5066-586-133MHz-1 MB, 2 MB Flash CPU Card фирмы Octagon Systems.
Модуль 12 интерфейса обеспечивает взаимодействие вычислительного модуля 11 связи с бортовой авионикой (устройствами 5, 6, 7, 8, 9, 10) по разным стыкам, например, дискретный сигнал в соответствии с ARINC 429, ARINC 664, ARINC 646, разовая команда и через бортовой вычислитель 5, двунаправленную шину 18 с системой управления подвижным объектом 3. Он может быть выполнен, например, на коммутаторе AFDX [10].
Модуль 15 физического уровня обеспечивает параллельную обработку в реальном масштабе времени сигналов всех n широкодиапазонных радиочастотных приемо-передающих модулей 16, необходимых совместно с узлами 19 и 17 для организации радиолиний передачи данных в ДКМВ и MB диапазонах. Причем при неисправности одного из модулей 16 программно бортовым вычислителем корректируются с помощью фазовращателей 19 фазы передаваемых (и принимаемых) с узлов 17 радиосигналов для восстановления прежней формы диаграммы направленности. В этом случае все функции реконфигурации, обработки и формирования сигнала соответствующего радиоканала связи, обработки данных и закрытия информации (при необходимости) будут выполнены программным способом. Взаимодействие существующих в прототипе и новых программных модулей будет осуществляться по заранее определенным правилам взаимодействия (протоколам и процедурам взаимодействия, входным и выходным данным), что обеспечит при необходимости их оперативное изменение (замена программного кода) в процессе полета. Это обеспечивает возможность формирования и обработки любого сигнала и данных, закрытие информации, интерфейс с внешним оборудованием по различным алгоритмам и стандартам даже в том случае, когда ПО 3 находится на границах двух зон ответственности автоматизированных систем управления воздушным движением, в которых для обмена данными между НК 1 и ПО 3 используются различные режимы линии передачи данных, например, VDL-2 и VDL-4. Таким образом, на уровне каналов связи (физический, канальный уровни, включая криптозащиту канала, доступа к сети) модуль 16, соединенный с бортовой ШД А 17, совместно с соответствующим фазовращателем 19, модулем 15 физического уровня и модулем 14 канального уровня обеспечивают совместимость с различными типами линий передачи данных «Воздух-Земля». Кроме этого, модуль 15 осуществляет установку частоты передачи, ширину полосы и т.д. Модуль 15 строится на быстродействующих сигнальных процессорах, которые включает в себя:
- интерфейсы и шлюзы (ввода-вывода и преобразования данных) на базе, например, матрицы шлюзов, программируемых полями FPGA (Field Programmable Gate Array) no технологии PCI (VME);
- сигнальные процессоры, например, типа ADSP-21060 (фирмы Analog Devices), программируемых логических интегральных схем EPF10K50 (фирмы Altera), контроллеров AVR ATmega16 (фирмы Atmel) для контроля и управления процессом обработки (для модемов-кодеков, фильтров);
- универсальный вычислительный процессор, например, типа СРС 10502, реализующий протоколы обмена данными «Воздух-Земля», процедуры обнаружения и изоляции неисправностей и реконфигурацию модуля 15.
Вводимый узел 19 может быть выполнен на серийных фазовращателях MB и ДКМВ диапазонов.
Антенная решетка может быть выполнена, например, на комбинации полуволновых вибраторов MB и ДКМВ диапазонов, разнесенных по поверхности подвижного объекта таким образом, чтобы обеспечить заданный сектор связи. Например, при любом расположении абонентов в пространстве узлы 17 должны быть расположены по периметру поверхности подвижного объекта с необходимым количеством строк для формирования диаграммы направленности в угломестной плоскости.
Достоинства предложенной системы очевидны:
- увеличивается срок службы - жизненный цикл оборудования в условиях непрерывного совершенствования протоколов обмена данными «Воздух-Земля»;
- сокращается число и номенклатура запасного имущества и принадлежностей из-за использования однотипных узлов в бортовом оборудовании;
- исключаются потери мощности радиосигналов в антенно-фидерном тракте из-за непосредственного размещения модулей 16 на широкодиапазонной антенне 17;
- упрощается процесс эксплуатации - замена функций неисправного модуля в полете осуществляется программно;
- уменьшается стоимость модернизации оборудования, которая проводится только за счет коррекции программного обеспечения.
На момент подачи заявки разработаны алгоритмы функционирования и фрагменты программного обеспечения заявляемой системы радиосвязи.
Литература
1. Патент РФ №44907 U1, кл. Н04В 7/00, 2005.
2. Патент РФ №52290 U1, кл. Н04В 7/26.
3. Патент РФ №68211 U1, кл. Н04В 7/26 (прототип).
4. Д.С.Конторов, Ю.С.Голубев-Новожилов. Введение в радиолокационную системотехнику. - М.: Сов. Радио, 1971, 367 с.
5. Б.И.Кузьмин «Сети и системы цифровой электросвязи», часть 1 «Концепция» ИКАО CNS/ATM, Москва Санкт-Петербург: ОАО «НИИЭР», 1999, 206 с.
6. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, 76 с.
7. RTCA/DO-297. Руководство по разработке ИМА и рассмотрение ее сертификации, 2005.
8. ARINC 651. Руководство по разработке интегрированной модульной авионики. 1991.
9. ARINC 653-1. Стандартные интерфейсы программного обеспечения приложений авионики. 2003.
10. ARINC 664. Бортовая сеть передачи данных. В 7-ми частях. 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2014 |
|
RU2557801C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516868C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793106C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ С ПРИМЕНЕНИЕМ РАДИОФОТОННЫХ ЭЛЕМЕНТОВ | 2018 |
|
RU2686456C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516686C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2572521C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2688199C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516704C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2505929C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2427078C1 |
Изобретение относится к радиотехнике и может использоваться в системах обмена данными между подвижными объектами, наземными комплексами и другими абонентами системы. Технический результат состоит в повышении помехозащищенности системы и увеличении дальности устойчивой связи. Для этого бортовая радиотехническая система определяет направление на источник помех и корректирует в соответствии с этим форму диаграммы приемной антенны. В бортовой радиотехнической системе введены n фазовращателей, подключенных двухсторонними связями как к соответствующим входам/выходам n бортовых широкодиапазонных радиочастотных приемо-передающих модулей, так и к n входам/выходам модуля канального уровня, управляющие входы/выходы n фазовращателей подключены двухсторонними связями к соответствующим n входам/выходам бортового вычислителя. 3ил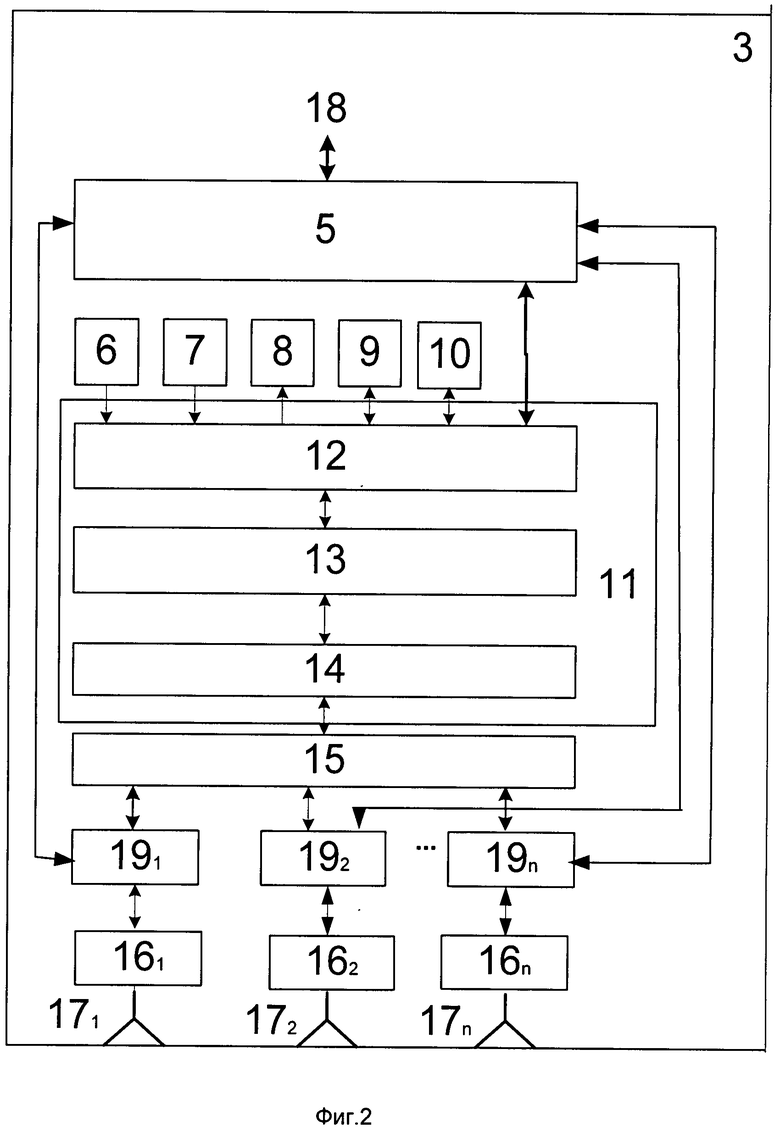
Система радиосвязи с подвижными объектами, состоящая из М территориально разнесенных наземных комплексов связи и N подвижных объектов, связанных между собой каналами связи «Воздух-Воздух» MB диапазона, а каналами радиосвязи «Воздух-Земля» MB и ДКМВ диапазонов с М наземными комплексами, которые соединены между собой и с внешними абонентами через наземную сеть передачи данных, каждый подвижный объект содержит n бортовых широкодиапазонных антенн, соединенных непосредственно с n бортовыми широкодиапазонными радиочастотными приемо-передающими модулями, модуль физического уровня подключен двухсторонними связями через последовательно соединенные модуль канального уровня, модуль маршрутизатора и модуль интерфейсов - к бортовому вычислителю, имеющему двунаправленный интерфейс бортовой системы управления подвижным объектом, входы модуля интерфейсов подключены к бортовым датчикам, приемнику сигналов навигационной спутниковой системы, выход модуля интерфейсов подключен к блоку регистрации данных, второй вход/выход модуля интерфейсов подключен к бортовому анализатору типа принимаемых сообщений, третий вход/выход - к бортовому формирователю типа ретранслируемых сообщений, а каждый наземный комплекс содержит наземные антенны MB и ДКМВ диапазонов, связанные соответственно с наземными радиостанциями MB и ДКМВ диапазонов, подключенными двухсторонними связями через наземную аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), второй вход/выход которого подключен к входу/выходу НК для наземной сети передачи данных, третий вход/выход - к формирователю типа ретранслируемых сообщений, четвертый и пятый входы/выходы - к вторым входам/выходам наземных радиостанций MB и ДКМВ диапазонов соответственно, первый вход вычислителя АРМ подключен к наземному приемнику сигналов навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ, отличающаяся тем, что на каждом ПО введены n фазовращателей, подключенных двухсторонними связями как к соответствующим входам/выходам n бортовых широкодиапазонных радиочастотных приемо-передающих модулей, так и к n входам/выходам модуля физического уровня, управляющие входы/выходы n фазовращателей подключены двухсторонними связями к соответствующим n входам/выходам бортового вычислителя.
| Тихоходный электродвигатель | 1944 |
|
SU68211A1 |
| Электроконтактное приспособление к абразивно-доводочным станкам для автоматического контроля отверстий в процессе обработки | 1951 |
|
SU94101A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| Щетка | 1934 |
|
SU44907A1 |
| US5669052 A, 16.09.1997 | |||
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Щетка | 1934 |
|
SU44907A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Тихоходный электродвигатель | 1944 |
|
SU68211A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US5669052 A, (Motorola), 16.09.1997 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| . | |||

