Изобретение относится к области гидроакустики, а именно к гидроакустическим средствам освещения ближней обстановки с высокой разрешающей способностью. Благодаря высокому пространственному разрешению эти средства позволяют воспроизводить акустическое изображение подводных объектов с качеством, достаточным для их распознавания. Необходимым условием для обеспечения высокого пространственного разрешения является увеличение числа элементов антенны до ста и более.
Известно устройство освещения подводной обстановки, содержащие приемную и излучающую антенны, генератор излучаемых сигналов, устройство формирования характеристики направленности излучающей антенны, устройство формирования характеристики направленности приемной антенны и устройство обработки принятых сигналов (Патент РФ №2393503, МПК G01S 15/00, 12.05.2009). Реализация на основе этого устройства станции с высоким разрешением наталкивается на следующие проблемы. Разделение излучающей и приемной антенн в силу большого числа элементов в каждой из них приводит к увеличению размеров и удорожанию системы в целом. Кроме того, формирование характеристики направленности излучения для каждого направления наблюдения и, следовательно, последовательный характер обзора пространства из-за ограниченной скорости распространения звука приводит к существенному увеличению времени обзора всего пространства.
Известна система активной гидролокации гидроакустической станции (ГАС), содержащая излучающую и приемную акустические антенны, генераторное устройство, последовательно соединенные устройство формирования характеристик направленности в приеме и устройство обработки эхосигналов от цели (Справочник по гидроакустике. А.П. Евтютов, А.Е. Колесников и др. 2-е изд. - Л.: Судостроение, 1982, с. 13). При использовании слабонаправленной излучающей антенны обзор заданного сектора обзора может производиться всего за одну посылку зондирующего сигнала. Однако использование разнесенных приемной и излучающей антенн при большом числе элементов увеличивает размеры и стоимость антенного блока и гидролокатора в целом. Известна гидроакустическая станция контроля подводной обстановки, включающая приемно-излучающую антенну, генератор, коммутатор, через который генератор подключен к приемно-излучающей антенне, надводный блок обработки и визуализации и подводный кабель, соединяющий приемно-излучающую антенну с надводным модулем обработки и визуализации. Приемно-излучающая антенна станции имеет форму цилиндра, что обеспечивает круговое освещение подводной обстановки, однако в случае необходимости обеспечения высокого пространственного разрешения лишь в ограниченном секторе углов размещение элементов антенны по всей окружности является избыточным и приводит к существенному увеличению размеров антенны. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. - Санкт-Петербург: Наука, 2004, с. 343).
Наиболее близким по технической сущности и достигаемому результату к изобретению (прототипом) является известная гидроакустическая система освещения ближней обстановки, содержащая размещенные в герметичном корпусе антенный блок, блок генерации излучаемого сигнала, блок обработки принятого сигнала, а также размещенный в герметичном корпусе блок графического отображения акустического изображения, соединенный кабельной линией связи с выходом блока обработки принятого сигнала, при этом антенный блок содержит излучающую и приемную многоэлементные решетки в виде взаимно перпендикулярных линеек, блок генерации излучаемого сигнала содержит последовательно соединенные генератор, многоотводную линию задержки и многоканальный усилитель, выход которого соединен с излучающей многоэлементной решеткой, блок обработки принятого сигнала содержит последовательно соединенные с выходом приемной антенной решетки приемный усилитель, аналого-цифровой преобразователь, формирователь характеристик направленности и блок вычисления корреляционной функции (Патент РФ №2457145, МПК G01S 15/02, 20.01.2011).
Недостатком этого устройства является малая скорость обзора всего сектора из-за последовательного характера его облучения узким лучом и относительно малой скорости распространения звука в воде. Кроме того, наличие разнесенных приемной и излучающей антенн увеличивает размер антенного блока, а неучет кривизны фронта волны на апертуре приемной антенны ограничивает ее размеры и, следовательно, угловую разрешающую способность.
Техническим результатом изобретения является увеличение скорости обзора пространства, увеличение ширины сектора обзора, увеличение разрешающей способности по углу, а также упрощение конструкции антенного блока.
Технический результат достигается за счет того, что в гидроакустической системе освещения ближней обстановки, содержащей подводный модуль в виде герметичного корпуса, в котором размещены антенный блок, блок генерации излучаемого сигнала, содержащий последовательно соединенные генератор, многоотводную линию задержки и многоканальный усилитель, и блок обработки принятого сигнала, включающий последовательно соединенные блок приемных усилителей и блок аналого-цифровых преобразователей, а также блок обработки и графического отображения, соединенный кабельной линией связи с выходом подводного модуля, подводный модуль снабжен многоканальным коммутатором, включенным между антенным блоком, многоканальным усилителем мощности и блоком приемных усилителей, а также блоком управления коммутатором, вход которого соединен с выходом блока аналого-цифровых преобразователей, а выход соединен с входом генератора, и интерфейсом, включенным между блоком управления коммутаторами и кабельной линией связи, причем антенный блок выполнен в виде многоэлементной линейной антенны, блок обработки и графического отображения выполнен в виде надводного модуля, размещенного на плавучей платформе и включающего последовательно соединенные с выходом интерфейса блок распаковки, блок корреляторов, блок секционирования, блок фокусирующих задержек, блок формирователей характеристик направленности, блок формирования акустического изображения с графическим дисплеем и блок управления, при этом подводный модуль закреплен к надводной платформе посредством штанги с сервоприводом с возможностью вращения вокруг оси, а блок управления включен между сервоприводом и блоком формирования акустического изображения.
Сущность изобретения поясняется чертежом, на котором представлена блок-схема предлагаемого устройства.
Гидроакустическая система освещения ближней обстановки содержит подводный модуль в виде герметичного корпуса 1, в котором размещены антенный блок 2, блок генерации излучаемого сигнала, содержащий последовательно соединенные генератор 3, многоотводную линию задержки 4 и многоканальный усилитель 5, и блок обработки принятого сигнала, включающий последовательно соединенные блок приемных усилителей 6 и блок аналого-цифровых преобразователей 7, а также блок обработки и графического отображения 8, соединенный кабельной линией связи 9 с выходом подводного модуля 1, который снабжен многоканальным коммутатором 10, включенным между антенным блоком 2, многоканальным усилителем мощности 5 и блоком приемных усилителей 4, а также блоком управления коммутатором 11, вход которого соединен с выходом блока аналого-цифровых преобразователей 5, а выход соединен с входом генератора 3, и интерфейсом 12, включенным между блоком управления коммутатором 11 и кабельной линией связи 9, причем антенный блок выполнен в виде многоэлементной линейной антенны 2, блок обработки и графического отображения выполнен в виде надводного модуля, размещенного на плавучей платформе (на чертеже не показана) и включающего последовательно соединенные с выходом интерфейса 12 блок распаковки 13, блок корреляторов 14, блок секционирования 15, блок фокусирующих задержек 16, блок формирователей характеристик направленности 17, блок формирования акустического изображения 18 с графическим дисплеем 19 и блок управления 20, при этом подводный модуль 1 закреплен к надводной платформе посредством штанги с сервоприводом 21 с возможностью вращения вокруг оси, а блок управления 20 включен между сервоприводом 20 и блоком формирования акустического изображения 18.
Устройство работает следующим образом. По команде, формируемой надводным модулем обработки и графического отображения 8 и передаваемой через подводный кабель связи 9 и интерфейс 10 на подводный модуль 1, блок управления коммутатором 11 вырабатывает синхроимпульс, который инициирует формирование генератором 3 излучаемого сигнала. Сформированный сигнал подается на вход многоотводной линии задержки 4. Время задержки сигнала возрастает относительно выхода, подключаемого к центральному элементу, причем время задержки между соседними элементами антенны начиная с центрального элемента, возрастает на одну и ту же величину:
где d - шаг между элементами излучающей антенны;
Δφ - требуемая ширина сектора облучения за одну посылку зондирующего сигнала;
с - скорость звука в воде;
m - целое число, определяемое количеством элементов антенны N:
где функция Е() вычисляет целую часть аргумента.
Сигналы с выхода многоотводной линии задержки 4 через многоканальные усилители 5 и многоканальный коммутатор 10 подключаются к элементам антенны 2. Модельные и натурные измерения сформированного таким образом излучения показали равномерность его интенсивности в пределах 3 дБ во всем секторе Δφ, в том числе и в ближнем поле антенны.
Обработка сигналов в надводном модуле включает распаковку принятых с подводного модуля сигналов по элементам антенны в блоке 13, вычисление в блоке 14 модуля корреляционной функции каждого сигнала с излучаемым сигналом, разбиение в блоке 15 каждой корреляционной функции по времени на отдельные секции, соответствующие выбранным фокусным расстояниям, компенсацию для каждой секции в блоке 16 фокусирующих задержек при приеме сигнала от источника с соответствующего фокусного расстояния, формирование для каждой секции веера характеристик направленности в блоке 17. В блоке 18 производится формирование акустического изображения путем вычисления амплитуды сигнала на выходе блока 17, вычисления текущих координат по дистанции и углу с последующим пересчетом в декартовую систему координат. Вычисление координат производится с учетом текущего угла поворота антенны, приводимой в движение с помощью шагового сервопривода 21 по команде блока управления 20. Текущие значения угла поворота антенны, вырабатываемые блоком управления, поступают в блок формирования акустического изображения 18 с графическим дисплеем 19, который одновременно вычисляет амплитуду и координаты текущих точек сканирования пространства.
Дистанция до текущей точки вычисляется по значению положения по времени корреляционной функции ti:
где с - скорость звука в воде.
В неподвижной координатной системе, связанной с местностью, угловая координата текущей точки сканирования в момент времени ti вычисляется по формуле:
Пli=φa(ti)+φl,
где φa(ti) - значение угла поворота антенны в текущий момент времени ti;
φl - направление 1-го луча в координатной системе антенны.
Преобразование полярной системы координат (Di, Пli) в декартовую выполняется известным способом:
Xli=Di·sinПli,
Yli=Di·cosПli.
Полученные оценки уровня сигнала в совокупности всех точек (Xli, Yli) отображаются на графическом дисплее 19.
Применение дополнительных линий задержки в режиме излучения позволяет облучить весь заданный сектор обзора во всем интервале дистанций, включая ближнюю зону антенны, за одну посылку зондирующего сигнала, что существенно сокращает время обзора. Благодаря фокусировке антенны в режиме приема длину антенны и, следовательно, ее разрешающую способность можно увеличивать практически неограниченно, а при фокусировке антенны на несколько дистанций можно практически неограниченно увеличить диапазон дистанций обзора. За счет вращения подводного модуля с антенной сектор обзора также может быть неограниченно увеличен.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2576349C2 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ КОНТРОЛЯ ВНЕШНЕЙ ОБСТАНОВКИ | 2014 |
|
RU2573173C1 |
| УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОЙ ВИЗУАЛИЗАЦИИ | 2014 |
|
RU2568338C1 |
| УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОЙ ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 2011 |
|
RU2457145C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ ТРАЛА | 2010 |
|
RU2447458C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2011 |
|
RU2461845C1 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ КОНТРОЛЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2574169C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2014 |
|
RU2572666C1 |
| Гидроакустическая станция контроля подводной обстановки | 2019 |
|
RU2724145C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
Изобретение относится к области гидроакустики, а именно к гидроакустическим средствам освещения подводной обстановки с высокой разрешающей способностью. Сущность: в гидроакустической системе освещения ближней обстановки, содержащей подводный модуль в виде герметичного корпуса, в котором размещены антенный блок, блок генерации излучаемого сигнала, содержащий последовательно соединенные генератор, многоотводную линию задержки и многоканальный усилитель, и блок обработки принятого сигнала, включающий последовательно соединенные блок приемных усилителей и блок аналого-цифровых преобразователей, а также блок обработки и графического отображения, соединенный кабельной линией связи с выходом подводного модуля, подводный модуль снабжен многоканальным коммутатором, включенным между антенным блоком, многоканальным усилителем мощности и блоком приемных усилителей, а также блоком управления коммутатором, вход которого соединен с выходом блока аналого-цифровых преобразователей, а выход соединен с входом генератора, и интерфейсом, включенным между блоком управления коммутатором и кабельной линией связи, причем антенный блок выполнен в виде многоэлементной линейной антенны, блок обработки и графического отображения выполнен в виде надводного модуля, размещенного на плавучей платформе и включающего последовательно соединенные с выходом интерфейса блок распаковки, блок корреляторов, блок секционирования, блок фокусирующих задержек, блок формирователей характеристик направленности, блок формирования акустического изображения с графическим дисплеем и блок управления, при этом подводный модуль закреплен к надводной платформе посредством штанги с сервоприводом с возможностью вращения вокруг оси, а блок управления включен между сервоприводом и блоком формирования акустического изображения. Технический результат: увеличение скорости обзора пространства, увеличение ширины сектора обзора, увеличение разрешающей способности по углу, а также упрощение конструкции антенного блока. 1 ил.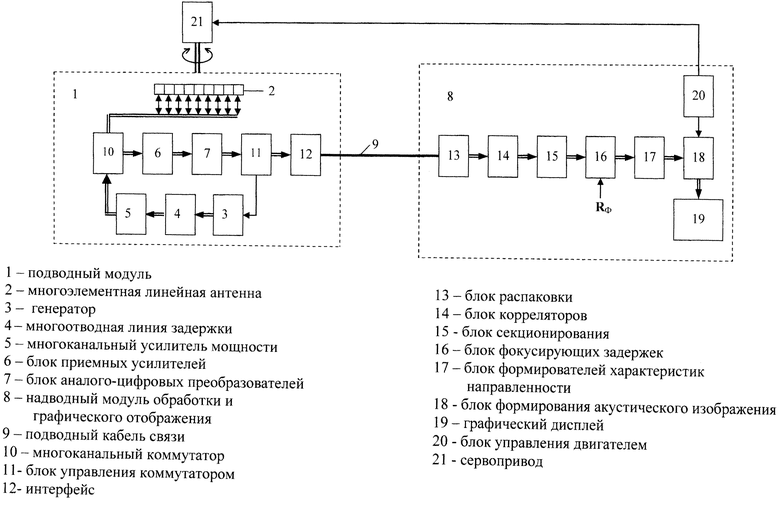
Гидроакустическая система освещения ближней обстановки, содержащая подводный модуль в виде герметичного корпуса, в котором размещены антенный блок, блок генерации излучаемого сигнала, содержащий последовательно соединенные генератор, многоотводную линию задержки и многоканальный усилитель, и блок обработки принятого сигнала, включающий последовательно соединенные блок приемных усилителей и блок аналого-цифровых преобразователей, а также блок обработки и графического отображения, соединенный кабельной линией связи с выходом подводного модуля, отличающаяся тем, что подводный модуль снабжен многоканальным коммутатором, включенным между антенным блоком, многоканальным усилителем мощности и блоком приемных усилителей, а также блоком управления коммутатором, вход которого соединен с выходом блока аналого-цифровых преобразователей, а выход соединен с входом генератора, и интерфейсом, включенным между блоком управления коммутатором и кабельной линией связи, причем антенный блок выполнен в виде многоэлементной линейной антенны, блок обработки и графического отображения выполнен в виде надводного модуля, размещенного на плавучей платформе и включающего последовательно соединенные с выходом интерфейса блок распаковки, блок корреляторов, блок секционирования, блок фокусирующих задержек, блок формирователей характеристик направленности, блок формирования акустического изображения с графическим дисплеем и блок управления, при этом подводный модуль закреплен к надводной платформе посредством штанги с сервоприводом с возможностью вращения вокруг оси, а блок управления включен между сервоприводом и блоком формирования акустического изображения.
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОЙ ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 2011 |
|
RU2457145C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА | 2012 |
|
RU2501038C1 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| Щит для проходки туннелей в средних и крепких горных породах | 1958 |
|
SU117018A1 |
| Устройство для подачи к станку цилиндрических или шаровидных изделий | 1959 |
|
SU127945A1 |
| US2006193206 A1, 31.08.2006. | |||

