Изобретение относится к области авиационной техники, в частности к системам управления тягой маршевого двигателя летательного аппарата (ЛА). Устройство предназначено для ручного и автоматического управления тягой двигателя ЛА.
Известны устройства управления тягой маршевого двигателя (патент РФ 1776001, патент РФ 2031814), содержащие рычаг управления двигателем (РУД) и механические устройства, позволяющие устанавливать РУД в различных положениях. Одним из существенных недостатков этого устройства является отсутствие возможности автоматического перемещения РУД.
Наиболее близким к предлагаемому изобретению, по совокупности признаков, является устройство (Патент US 3,363,480), содержащее ручной и автоматический каналы управления. В которых РУД связан с выходным звеном электромеханического привода на основе планетарной зубчатой передачи, а рычаг загрузки связан с механизмом загрузки РУД, выполненном на основе фрикционного барабанного тормоза.
Данное устройство обладает следующими недостатками:
Регулирование усилия загрузки РУД обеспечивается поджатием фрикционного барабанного тормоза как в ручном, так и в автоматическом режимах под действием постоянно действующей нагрузки, создаваемой фрикционным барабанным тормозом, что приводит к увеличению потребляемой мощности электромеханического привода и уменьшению ресурса механизма в целом.
Кроме того, в конструкции не предусмотрены арретирующие устройства, необходимые для установки РУД в фиксированных положениях, таких как «малый газ», «малый форсаж» и т.д., что свидетельствует о низких эргономических показателях устройства и приводит к снижению безопасности пилотирования.
Цель предлагаемого изобретения заключается в упрощении конструкции, уменьшении массагабаритных параметров, увеличении ресурса, надежности и эргономичности.
Заявленный технический результат достигается тем, устройство для управления тягой маршевого двигателя ЛА, состоит из ручного и автоматического каналов управления и механизма загрузки, при этом автоматический канал выполнен на основе электромеханического привода, состоящего из электродвигателя и многоступенчатой механической передачи, так, в качестве выходной ступени механической передачи использована волновая передача с промежуточными телами качения, состоящая из дискового волнообразователя, сепаратора с несколькими рядами тел качений и жесткого колеса, а механизм загрузки состоит из косой шайбы с рычагом загрузки, размещенных так, что оси дискового волнообразователя и ручки управления соосны с осью вращения косой шайбы установленной на радиально-упорных подшипниках, а боковые поверхности косой шайбы взаимодействует с одной стороны с торцевой поверхностью рычага управления двигателем через шарики и установленный между ними пакет тарельчатых пружин арретирующего механизма, а с противоположной стороны - с фрикционным диском, поджатым к косой шайбе упругими элементами, при этом дисковый волнообразователь кинематически соединен с валом электродвигателя с помощью цилиндрической зубчатой передачи, а рычаг управления двигателем и рычаг загрузки кинематически соединены с кулачковыми микропереключателями и датчиками углового положения с помощью разрезных люфтовыбирающих зубчатых колес.
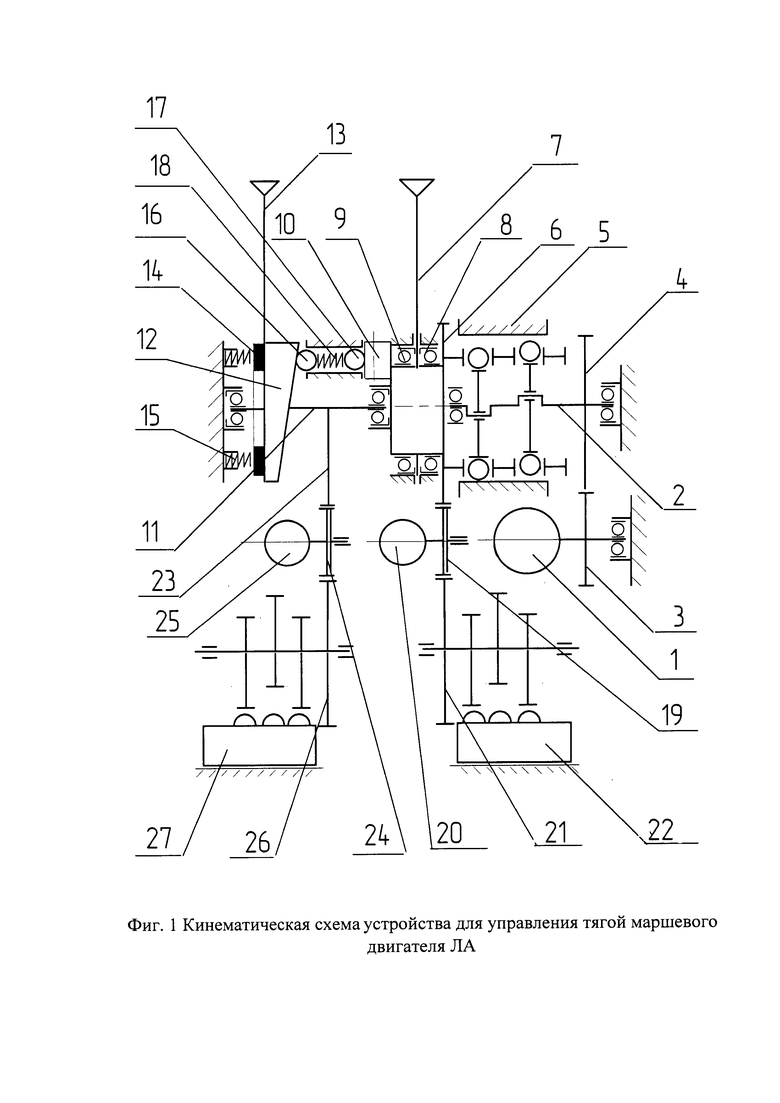
Техническая сущность и принцип действия устройства для управления тягой маршевого двигателя ЛА поясняется на фиг. 1, на которой изображена кинематическая схема устройства для управления тягой маршевого двигателя ЛА.
Устройство для управления тягой маршевого двигателя ЛА состоит из электродвигателя 1, ротор которого соединен с дисковым волнообразователем 2 через цилиндрическую зубчатую передачу, образованную зубчатыми колесами 3, 4, неподвижного жесткого колеса 5, сепаратора 6, жестко соединенного с РУД 7, установленным на радиально-упорных подшипниках 8, 9.
На торцевой поверхности РУД 7 с противоположной от сепаратора стороны расположен торцевой зуб 10.
Соосно с осью вращения РУД расположена ось 11 вращения механизма загрузки, содержащего кроме оси И, косую шайбу 12, имеющую наклонную и плоскую поверхности, рычаг загрузки 13 и фрикционный диск 14. Косая шайба 12 с плоской стороны контактирует с фрикционным диском 14, на который действуют упругие элементы 15, например тарельчатые пружины.
Между наклонной поверхностью косой шайбы 12 и торцевым зубом 10 расположен арретирующий механизм, состоящий их шариков 16, 17 и пакета тарельчатых пружин 18.
Сепаратор 6 снабжен зубчатым венцом для кинематической связи с датчиком углового положения РУД 7 с помощью разрезного люфтовыбирающего зубчатого колеса 19, установленного на валу датчика 20, и с блоком кулачковых концевых микропереключателей 21 через зубчатое колесо 22.
На оси 11 установлен зубчатый сектор 23 для кинематической связи с датчиком углового положения рычага загрузки 13 с помощью разрезного люфтовыбирающего зубчатого колеса 24, установленного на валу датчика 25, и с блоком кулачковых концевых микропереключателей 26 через зубчатое колесо 27.
Устройство для управления тягой маршевого двигателя ЛА работает следующим образом.
При работе ручного канала управления летчик перемещает РУД 7, преодолевая постоянный момент нагрузки, являющийся суммой момента трения в волновой передаче с промежуточными телами качения и момента сопротивления электродвигателя 1, работающего в тормозном режиме. При этом в движение приводятся все элементы кинематической цепи между электродвигателем 1 и РУД 7 в том числе и сепаратор 6, кинематически связанный с валами датчика 20 и блока концевых микропереключателей 21, поворот которых приводит к формированию информационных электрических сигналов о положении РУД 7.
При работе автоматического канала подается напряжение на обмотки электродвигателя 1, что приводит к возникновению крутящего момента, приводящего в движение все элементы кинематической цепи между электродвигателем 1 и РУД 7, в том числе и сепаратор 6, кинематически связанный с валами датчика 20 и блока концевых микропереключателей 21, положение которых приводит к формированию информационных электрических сигналов о положении РУД 7.
Максимальный момент, развиваемый электродвигателем 1 при работе дистанционного канала, определяется положением рычага загрузки 13. При перемещении рычага загрузки 13 летчик приводит во вращение ось 11 с установленным на ней зубчатым сектором 23 и кинематический связанные с ним валы датчика 25 и кулачки блока концевых микропереключателей 27, положение которых приводит к формированию информационных электрических сигналов о положении рычага загрузки 13. При этом самопроизвольное перемещение рычага 13 загрузки исключено за счет поджатая косой шайбы 12, на которой установлен рычаг загрузки, фрикционным диском 14 с помощью упругих элементов 15.
Кроме того вращение рычага загрузки 13 приводит к повороту косой шайбы 12, ведущего к поджатию шариков 16, 17 на величину пропорциональную повороту косой шайбы, за счет сжатия пакета тарельчатых пружин 18. Таким образом, при перемещении РУД 7 через определенные положения, например «Малый форсаж», размещенный на его боковой поверхности торцевой зуб 10 пересиливает поджатый шарик 17, что позволяет оператору тактильно определять положение РУД 7 и повышает эргономические показатели устройства и безопасность пилотирования при работе ручного канала.
Устройство для управления тягой маршевого двигателя ЛА с соосным расположением механизма загрузки и механической передачи с использованием волновой передачи с промежуточными телами качения имеет простую и компактную конструкцию с небольшими массогабаритными параметрами, в которой отсутствие кинематической связи между механизмом загрузки и механической передачей обеспечивает высокий ресурс и энергетические показатели устройства.
Наличие арретирующего устройства фиксации РУД в виде поджатого шарика и торцевого зуба повышает эргономические показатели устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновая передача с выбором люфта | 2020 |
|
RU2747227C1 |
| Шарнир манипулятора | 1988 |
|
SU1535717A1 |
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2018 |
|
RU2678397C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СИЛОВОЙ МИНИ-ПРИВОД УПРАВЛЕНИЯ ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА С ФУНКЦИЕЙ СКЛАДЫВАНИЯ И РАСКРЫТИЯ СЕКЦИИ КРЫЛА | 2014 |
|
RU2565861C1 |
| ПЛАНЕТАРНЫЙ ЭЛЕКТРОМОТОР-РЕДУКТОР С ИЗМЕНЯЮЩИМСЯ ЭКСЦЕНТРИСИТЕТОМ ВРАЩЕНИЯ САТЕЛЛИТ-ЯКОРЯ | 2007 |
|
RU2352047C2 |
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2018 |
|
RU2789364C1 |
| СИЛОВОЙ МИНИ-ПРИВОД ПЕТЛЕОБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2519612C2 |
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2014 |
|
RU2547669C1 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
Изобретение относится к области авиастроения. Устройство для управления тягой маршевого двигателя ЛА состоит из ручного и автоматического каналов управления и механизма загрузки, при этом автоматический канал выполнен на основе электромеханического привода, состоящего из электродвигателя и многоступенчатой механической передачи, в качестве выходной ступени которой использована волновая передача с промежуточными телами качения с выходным сепаратором, а механизм загрузки состоит из косой шайбы с рычагом загрузки, размещенных так, что оси дискового волнообразователя и ручки управления соосны с осью вращения косой шайбы, установленной на радиально-упорных подшипниках, а боковые поверхности косой шайбы взаимодействуют с одной стороны с торцевой поверхностью рычага управления двигателем через шарики и установленный между ними пакет тарельчатых пружин арретирующего механизма, а с противоположной стороны - с фрикционным диском, поджатым к косой шайбе упругими элементами. Дисковый волнообразователь кинематически соединен с валом электродвигателя с помощью цилиндрической зубчатой передачи, а рычаг управления двигателем и рычаг загрузки кинематически соединены с кулачковыми микропереключателями и датчиками углового положения с помощью разрезных люфтовыбирающих зубчатых колес. Обеспечивается упрощение конструкции, уменьшение массагабаритных параметров, а также повышение надежности. 1 ил.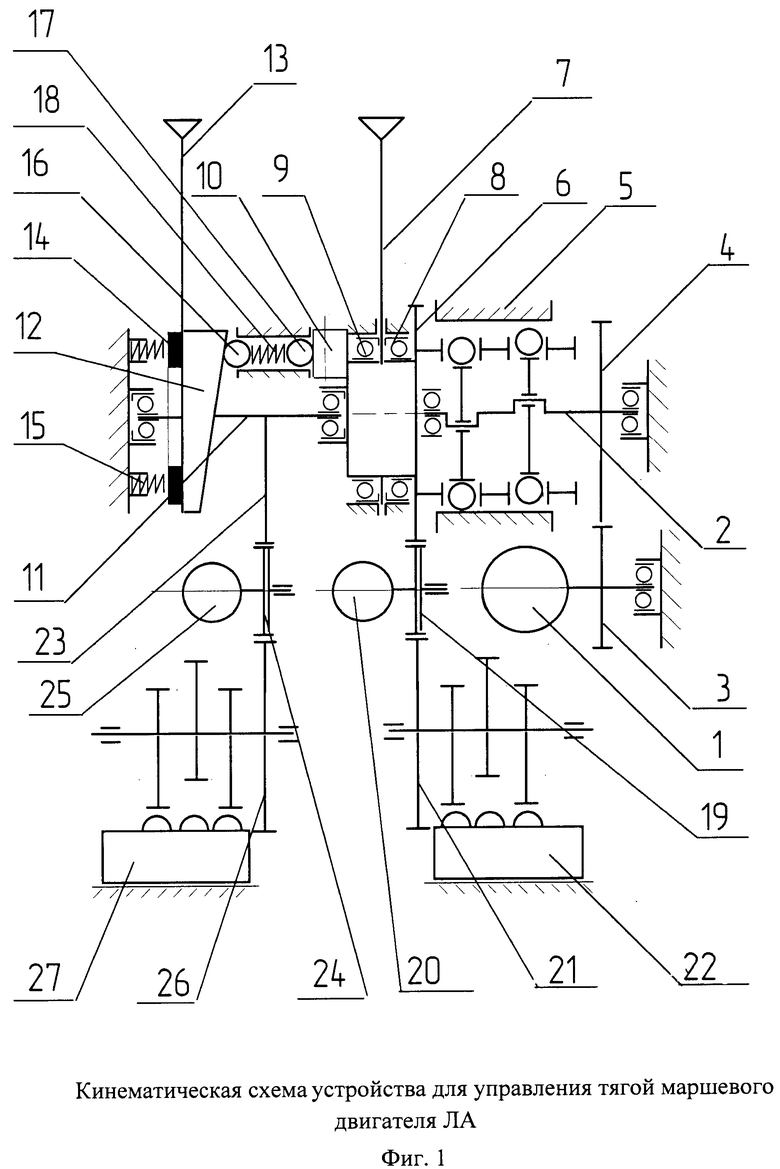
Устройство для управления тягой маршевого двигателя ЛА, состоящее из ручного и автоматического каналов управления и механизма загрузки, при этом автоматический канал выполнен на основе электромеханического привода, состоящего из электродвигателя и многоступенчатой механической передачи, отличающегося тем, что в качестве выходной ступени механической передачи использована волновая передача с промежуточными телами качения, состоящая из дискового волнообразователя, сепаратора с несколькими рядами тел качений и жесткого колеса, а механизм загрузки состоит из косой шайбы с рычагом загрузки, размещенных так, что оси дискового волнообразователя и ручки управления соосны с осью вращения косой шайбы, установленной на радиально-упорных подшипниках, а боковые поверхности косой шайбы взаимодействуют с одной стороны с торцевой поверхностью рычага управления двигателем через шарики и установленный между ними пакет тарельчатых пружин арретирующего механизма, а с противоположной стороны - с фрикционным диском, поджатым к косой шайбе упругими элементами, при этом дисковый волнообразователь кинематически соединен с валом электродвигателя с помощью цилиндрической зубчатой передачи, а рычаг управления двигателем и рычаг загрузки кинематически соединены с кулачковыми микропереключателями и датчиками углового положения с помощью разрезных люфтовыбирающих зубчатых колес.
| US 3363480 A1, 16.01.1968 | |||
| СИСТЕМА И СПОСОБ ДЛЯ ФОРСИРОВАНИЯ ГЛАВНОЙ СИЛОВОЙ УСТАНОВКИ | 2017 |
|
RU2743603C2 |
| CN 204173161 U, 25.02.2015. | |||
