Изобретение относится к области машиностроения и может быть применено в приводах автоматических систем управления летательных аппаратов.
Известны петлеобразные механизмы, включающие несколько выходных редукторов, объединенных общим валом. Выходные редукторы содержат механические передачи, размещенные внутри подвижных и неподвижных цилиндрических деталей, снабженных крепежными элементами.
В патенте [1] петлеобразный механизм ЛА содержит винтовую передачу, винты которой объединены общим валом. На наружной поверхности гайки выполнены резьбовые шпоночные канавки, а на внутренних цилиндрических поверхностях выполнены шпонки, вставленные в шпоночные канавки. При вращении общего вала гайка совершает поступательное движение по резьбе вдоль общего вала. Поступательное движение гайки и наличие резьбовых шпоночных канавок вызывают поворот подвижного цилиндра с крепежными элементами, соединенными с объектом управления. Передаточное число этого механизма равно отношению шага резьбовой шпоночной канавки и шага резьбы на общем валу.
Недостатками такого механизма являются большое трение между контактирующими поверхностями и ограниченное передаточное число. С целью уменьшения трения в этом же патенте предложена конструкция, в которой между подвижными звеньями использованы промежуточные тела качения - шарики.
В патенте [2] механическая передача выходного редуктора петлеобразного механизма содержит планетарные передачи. Центральные зубчатые колеса планетарных передач с внутренними зубьями выполнены на внутренней поверхности подвижных и неподвижных цилиндров. Ведущие центральные шестерни с наружными зубьями выполнены на общем валу. На осях сателлитов расположены зубчатые колеса с наружными зубьями, находящиеся в зацеплении с внутренними зубчатыми венцами подвижных или неподвижных цилиндров и ведущих центральных зубчатых колес.
Достоинством такой передачи является возможность создания большего момента и передаточного числа, чем в винтовых петлеобразных механизмах тех же габаритов, за счет многопарного зацепления и параллельного соединения планетарных передач.
Недостатком этого петлеобразного механизма является высокое трение за счет большого количества пар зубчатых колес.
В силовом мини-приводе подвижной аэродинамической поверхности [3] (прототипе) использованы высокоскоростной электродвигатель и двухступенчатая волновая передача с телами качения. Каждая ступень содержит дисковый волнообразователь, сепаратор с телами качения и жесткое колесо. В этих передачах реализуется большое передаточное число в одной ступени (от 6 до 60) при КПД>0,9 в одной ступени с лучшими массогабаритными показателями по сравнению с другими типами механических передач (см. рис.1.72 на стр.126 [4]). В волновых передачах с телами качения выходным звеном может быть как жесткое колесо, так и сепаратор.
Недостатком этого силового мини-привода подвижной аэродинамической поверхности является ограничение развиваемого момента из-за ограниченного объема двухступенчатого редуктора, а также невозможность использования нескольких таких силовых мини-приводов с общим синхронизирующим валом для управления объектами, имеющими элементы крепления к приводам, расположенные на большом расстоянии друг от друга.
Цель изобретения - создание механизмов петлеобразной формы, состоящих из двигателя, промежуточных и выходных ступеней волновой передачи с телами качения, с возможностью объединения нескольких петлеобразных механизмов общим синхронизирующим валом для управления объектами, имеющими элементы крепления к приводам, расположенные на большом расстоянии друг от друга, при этом каждый петлеобразный механизм должен обладать повышенной нагрузочной способностью в заданных габаритах, или, что то же, лучшими массогабаритными показателями, высоким КПД, и повышенной надежностью всей системы за счет общего синхронизирующего вала.
Поставленная цель достигается в силовом мини-приводе петлеобразной формы, состоящем из одного или нескольких выходных редукторов, промежуточных редукторов, электродвигателя и общего вала, при этом выходные редукторы выполнены из неподвижных и подвижных цилиндрических частей с крепежными элементами, внутри цилиндрических частей которых размещены механические передачи, так что выходные звенья этих передач соединены с подвижными цилиндрическими частями, а входные звенья выходных или промежуточных редукторов объединены общим валом. В качестве механической передачи выходных и промежуточных редукторов использован набор параллельно соединенных волновых передач с телами качения, состоящих из дисковых волнообразователей с эксцентриковыми втулками, сепараторов, представляющих собой цилиндры с отверстиями, в которых размещены тела качения, и жестких колес, при этом в выходных редукторах эксцентриковые втулки размещены на общем валу, сепараторы закреплены неподвижно, а жесткие колеса выполнены в виде составных частей подвижных цилиндров, являющихся выходными звеньями выходных редукторов, в промежуточных редукторах эксцентриковые втулки волнообразователей соединены с валом электродвигателя, жесткие колеса являются составными частями неподвижных цилиндров, а выходными звеньями являются сепараторы, соединенные с общим валом. Промежуточные редукторы размещены внутри неподвижной цилиндрической части последовательно с одной или двух сторон от выходного редуктора, при этом входные валы промежуточных редукторов объединены общим валом, соединенным с электродвигателем. Промежуточный редуктор размещен внутри корпуса электродвигателя, при этом общий вал проходит внутри вала электродвигателя. Промежуточный редуктор и электродвигатель размещены внутри неподвижной цилиндрической части одного из нескольких или каждого выходного редуктора.
На фиг.1 показан продольный разрез петлеобразного механизма, состоящего из двух выходных редукторов с общим валом.
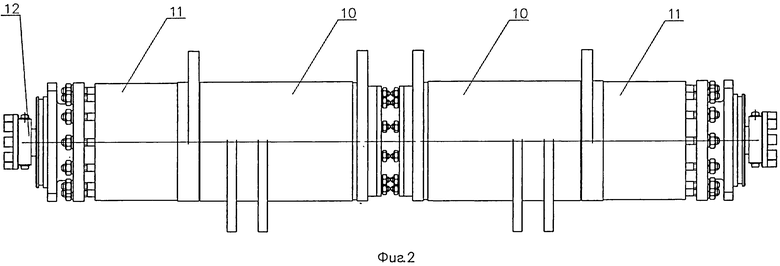
На фиг.2 показан петлеобразный механизм, состоящий из двух выходных редукторов с двумя промежуточными редукторами с общим валом, присоединяемыми к торцам выходных редукторов.
На фиг.3 показан продольный разрез петлеобразного механизма, состоящего из электрического двигателя и промежуточного редуктора с общим валом.
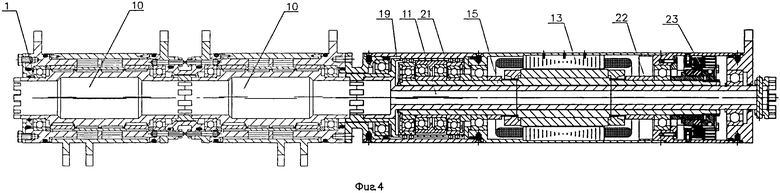
На фиг.4 показан механизм петлеобразной формы, состоящий из электрического двигателя, предварительного редуктора и двух выходных редукторов с общим валом.
Силовой мини-привод петлеобразной формы состоит из нескольких выходных редукторов, двигателя (двигателей) и промежуточного редуктора (редукторов), соединенных общим валом.
Каждый выходной редуктор имеет петлеобразную форму, образованную неподвижными и подвижными цилиндрическими частями с крепежными элементами.
Выходной редуктор выполнен в виде набора параллельно соединенных волновых передач с телами качения, состоящих из дискового волнообразователя, сепаратора, тел качения и жесткого колеса (см. фиг.1). Дисковый волнообразователь состоит из ведущего общего вала 1, на наружной цилиндрической поверхности которого закреплены эксцентриковые втулки 2, опорных роликов 3 и цилиндрических дисков 4, так, что эксцентриковые втулки 2, опорные ролики 3 и цилиндрические диски 4 образуют подшипники, ось которых смещена относительно оси ведущего вала 1 на величину эксцентриситета. Сепаратор 5 имеет несколько рядов равномерно распределенных вдоль цилиндрической поверхности отверстий, в которых расположены тела качения (шарики или ролики) 6. Жесткое колесо 7 имеет внутреннюю профилированную периодическую поверхность, число периодов которой на единицу больше, чем число тел качения 6 в одном ряду.
Сепаратор 5 выполнен составным и является неподвижной цилиндрической частью выходного редуктора, и имеет проушины 8 для крепления к неподвижной части летательного аппарата. Жесткие колеса 7 являются подвижными цилиндрическими частями силового мини-привода, и имеют проушины 9 для крепления объекта управления. Жесткие колеса 7 выходного редуктора опираются на тела качения 6 и выполняют функцию наружной обоймы радиального подшипника. Общий вал 1 проходит сквозь всю конструкцию выходных редукторов и с обоих торцов выходных редукторов имеет элементы крепления к общему валу силового мини-привода.
Силовой мини-привод петлеобразной формы может содержать несколько блоков, каждый из которых состоит из выходных редукторов 10, объединенных с промежуточным редуктором (редукторами) 11, расположенным(-ми) с одной или с двух сторон от выходных редукторов (см. фиг.2). Общий вал 12 промежуточного редуктора с обоих торцов блока имеет элементы крепления к общему валу аналогичных блоков или электродвигателей.
Силовой мини-привод петлеобразной формы может содержать один или несколько блоков, каждый из которых состоит из электродвигателя 13, объединенного с промежуточным редуктором 11 (см. фиг.3 и фиг.4). Двигатель 13 выполнен с полым ротором 15. С обоих торцов блока размещены элементы крепления к валу силового мини-привода, проходящему внутри ротора 15 двигателя 13.
Силовой мини-привод петлеобразной формы может содержать один или несколько блоков, состоящих из выходных редукторов 10, промежуточного редуктора 11 и двигателя 13, соединенных между собой (см. фиг.4). С обоих торцов блока имеются элементы крепления их общего вала к общему валу аналогичных блоков непосредственно или через соединительные участки общего вала.
Промежуточный редуктор 11 выполнен в виде волновых передач с телами качения, состоящих из дискового волнообразователя, сепаратора, тел качения и жесткого колеса (см. фиг.3). Дисковый волнообразователь состоит из установленных на роторе 15 двигателя 13 эксцентриковых втулок 16, подшипников 17 и цилиндрических дисков 18. Сепаратор 19 имеет несколько рядов равномерно распределенных вдоль цилиндрической поверхности отверстий, в которых расположены тела качения (шарики или ролики) 20. Жесткое колесо 21 имеет внутреннюю профилированную периодическую поверхность, число периодов которой на единицу больше, чем число тел качения 20 в одном ряду.
Жесткое колесо 21 промежуточного редуктора выполнено неподвижным и является частью корпуса блока, который может быть выполнен как отдельный блок с элементами крепления к корпусу и валу двигателя, или размещен внутри корпуса двигателя, и при этом общий вал будет проходить внутри вала двигателя. Сепаратор 19 является составной частью выходного вала промежуточного редуктора и снабжен элементами крепления к выходному редуктору непосредственно (см. фиг.4) или через соединительные участки общего вала. Для вывода выходного вала промежуточного редуктора с другой стороны двигателя внутри ротора 15 двигателя 13 пропущен общий вал 22, жестко связанный с сепаратором 19 и имеющий элементы крепления к общему валу, аналогичному блоку или выходному редуктору непосредственно или через соединительные участки общего вала. Двигатель 13 и выходной редуктор при необходимости может быть снабжен датчиком положения 23.
Промежуточный редуктор и двигатель могут быть размещены и внутри неподвижной цилиндрической части одного из нескольких или каждого выходного редуктора.
Силовой мини-привод петлеобразной формы работает следующим образом.
После подачи на электродвигатель 13 напряжения его ротор 15 начинает вращаться (см. фиг 3 и 4). Вместе с ротором начинают вращаться посаженные на него эксцентриковые втулки 16 промежуточного редуктора. Эксцентричное движение передается от втулок 16 через подшипники 17 дискам волнообразователя 18, и через них телам качения 20. Тела качения 20, которые находятся в отверстиях сепаратора 19, начинают обкатываться по профилированной поверхности жесткого колеса 21, передавая движение сепаратору 19. Сепаратор 19 вращает жестко прикрепленные к нему общий вал 22 и общий вал 1 выходных редукторов 10. Эксцентриковые втулки 2 общего вала 1 передают эксцентричное движение через опорные ролики 3 дискам волнообразователя 4 и телам качения 6 (см. фиг.1). Тела качения 6 находятся в отверстиях неподвижного сепаратора 5, и обкатываются по профилированной поверхности жесткого колеса 7, передавая движение подвижному жесткому колесу 7. Жесткое колесо 7 каждого из выходных редукторов 10 передает вращение объекту управления, который крепится к проушинам 9.
Таким образом, построение силового мини-привода из набора выходных редукторов, двигателей и промежуточных редукторов, выполненных в виде механизмов петлеобразной формы, объединенных между собой общим валом, и содержащих волновые передачи с телами качения в выходных и промежуточных редукторах так, что выходной редуктор построен из набора параллельно соединенных волновых передач с выходным жестким колесом, а промежуточный редуктор - с выходным сепаратором, позволило получить силовой механизм петлеобразной формы с большим развиваемым моментом и малыми габаритами, а варианты компоновки электродвигателей, промежуточных и выходных редукторов расширяют возможности использования унифицированных блоков в различных системах.
Ссылки
1. Republique Francaise Brevet d′invention 2164143, 1972.
2. Robert К. Tiedeman, Arnold G. Seipel, William C. Leuze. Rotary hinge actuator / US Patent 4932613, 1990.
3. Оболенский Ю.Г., Самсонович С.Л., Степанов B.C. Силовой мини-привод подвижной аэродинамической поверхности летательного аппарата. Патент РФ № 2408125. Опубл. 27.12.2010 Бюл. №36.
4. Геращенко А.Н., Постников В.А., Самсонович С.Л. Пневматические, гидравлические и электрические приводы летательных аппаратов на основе волновых исполнительных механизмов: Учебник. - 2-е изд., перераб. и доп. - М.: Изд-во МАИ-ПРИНТ, 2010. - 548 с.: ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ МИНИ-ПРИВОД ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2408125C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| ВОЛНОВОЙ РЕДУКТОР С ЭКСЦЕНТРИКОВЫМИ РОЛИКАМИ | 2012 |
|
RU2491455C1 |
| СИЛОВОЙ МИНИ-ПРИВОД | 2007 |
|
RU2321138C1 |
| СИЛОВОЙ МИНИПРИВОД (ВАРИАНТЫ) | 2004 |
|
RU2281597C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО ПРИВОДА | 2004 |
|
RU2265553C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СИЛОВОЙ МИНИ-ПРИВОД УПРАВЛЕНИЯ ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА С ФУНКЦИЕЙ СКЛАДЫВАНИЯ И РАСКРЫТИЯ СЕКЦИИ КРЫЛА | 2014 |
|
RU2565861C1 |
| Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении | 2015 |
|
RU2611471C2 |
| Электромеханический рулевой привод вращательного действия | 2018 |
|
RU2678385C1 |
| МУЛЬТИПЛИКАТОР ВЫСОКОМОЩНОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2015 |
|
RU2588351C1 |

Изобретение относится к машиностроению и может быть применено в приводах автоматических систем управления летательных аппаратов. Силовой мини-привод петлеобразной формы состоит из одного или нескольких выходных редукторов (10), внутри которых размещены механические передачи, входные звенья которых объединены общим валом (1), соединенным с двигателем (13) через промежуточный редуктор (11). В качестве механической передачи выходных редукторов (10) использован набор параллельно соединенных волновых передач с телами качения (6), многорядного волнообразователя, сепараторов (5) и жестких колес (7). Жесткие колеса (7) выполнены в виде составных частей подвижных цилиндров, являющихся выходными звеньями выходных редукторов. Промежуточный редуктор (11) выполнен в виде волновой передачи с телами качения (20), жесткого колеса (21), которое является составной частью неподвижного цилиндра, а выходным звеном является сепаратор (19), соединенный с общим валом (1). Изобретение позволяет улучшить массогабаритные показатели, повысить КПД и надежность всей системы. 3 з.п. ф-лы, 4 ил. 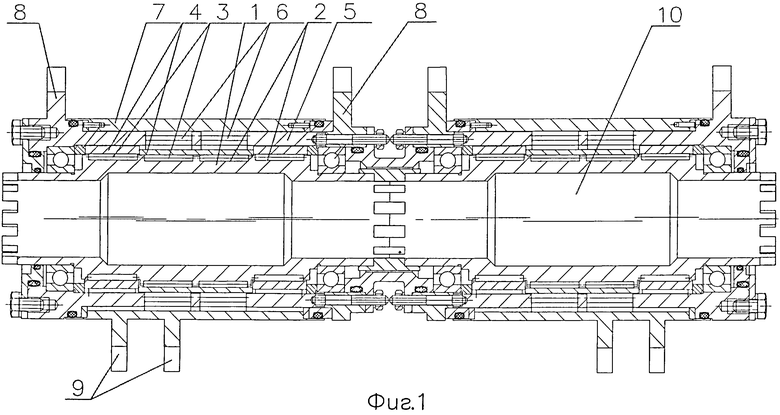
1. Силовой мини-привод петлеобразной формы, состоящий из одного или нескольких выходных редукторов, промежуточных редукторов, электродвигателя и общего вала, при этом выходные редукторы выполнены из неподвижных и подвижных цилиндрических частей с крепежными элементами, внутри цилиндрических частей которых размещены механические передачи так, что выходные звенья этих передач соединены с подвижными цилиндрическими частями, а входные звенья выходных или промежуточных редукторов объединены общим валом, отличающийся тем, что в качестве механической передачи выходных и промежуточных редукторов использован набор параллельно соединенных волновых передач с телами качения, состоящих из дисковых волнообразователей с эксцентриковыми втулками, сепараторов, представляющих собой цилиндры с отверстиями, в которых размещены тела качения, и жестких колес, при этом в выходных редукторах эксцентриковые втулки размещены на общем валу, сепараторы закреплены неподвижно, а жесткие колеса выполнены в виде составных частей подвижных цилиндров, являющихся выходными звеньями выходных редукторов, в промежуточных редукторах эксцентриковые втулки волнообразователей соединены с валом электродвигателя, жесткие колеса являются составными частями неподвижных цилиндров, а выходными звеньями являются сепараторы, соединенные с общим валом.
2. Силовой мини-привод петлеобразной формы по п.1, отличающийся тем, что промежуточные редукторы размещены внутри неподвижной цилиндрической части последовательно с одной или двух сторон от выходного редуктора, при этом входные валы промежуточных редукторов объединены общим валом, соединенным с электродвигателем.
3. Силовой мини-привод петлеобразной формы по п.1, отличающийся тем, что промежуточный редуктор размещен внутри корпуса электродвигателя, при этом общий вал проходит внутри вала электродвигателя.
4. Силовой мини-привод петлеобразной формы по п.3, отличающийся тем, что промежуточный редуктор и электродвигатель размещены внутри неподвижной цилиндрической части одного из нескольких или каждого выходного редуктора.
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ САМОЛЕТА | 2010 |
|
RU2442721C1 |
| СИЛОВОЙ МИНИ-ПРИВОД | 2007 |
|
RU2321138C1 |
| US 4721016 A, 26.01.1988 | |||
| US 4751855 A, 21.06.1988. | |||

