Изобретение относится к электромеханическим приводам управления и может быть использовано в качестве резервированного высоконадежного устройства в системах управления летательных аппаратов.
Резервированные электромеханические приводы стали рассматриваться в настоящее время, как альтернативные электрогидравлическим приводам, в том числе приводам аэродинамических поверхностей или шасси, так как переход на электросистемы позволяет снизить общие массовые показатели и упростить обслуживание летательного аппарата.
Основной задачей резервирования приводов является сохранение работоспособности при энергетическом или механическом отказе.
В электрогидравлических резервированных приводах (например, патент RU №2305800 от 21.11.2005) задача обеспечения работоспособности решается путем отключения отказавшего привода и подключением полостей гидроцилиндра отказавшего привода к каналу слива. В результате отказавший привод не создает сопротивления движению объекта регулирования, управляемому вторым исправным приводом.
При подключении всех рабочих полостей гидромотора к каналу высокого давления осуществляется стопорение объекта регулирования, что позволяет удерживать его в определенном положении без потребления энергии.
Соединение всех рабочих полостей между собой («закольцовывание полостей») обеспечивает режим демпфирования.
При этом резервированные приводы могут работать поочередно или одновременно, создавая каждый половину требуемого момента, что повышает ресурс их работы.
Известны резервированные электромеханические приводы, в которых отключение отказавшего привода осуществляется: пиротехническими средствами (патент RU №2442721 от 09.06.2010); устройствами, использующими электродвигатель (патент US 4,637,272 кл. F16H 1/00), и электромагнитными муфтами (патент RU 2526368 кл. F16H 25/22).
Используемые в патенте (RU №2442721 от 09.06.2010) пиротехнические средства, разрушают элементы соединения отказавшего привода с объектом управления при любых видах электрического или механического отказа. Уничтожение крепежных элементов не позволяет осуществлять повторное включение отказавшего привода без его демонтажа и установки нового, что существенно увеличивает время и затраты на его восстановление. Кроме того, использование пиротехнических средств не позволяет проводить контрольные тесты резервированного привода перед его установкой, во время предполетных проверок и в процессе полета.
Известен резервированный электромеханический привод вращательного действия, в котором отключение отказавшего привода осуществляется с помощью электромагнитной муфты (патент RU №2408125 от 27.01.2010).
В этом приводе электромагнитная муфта расположена между ротором электродвигателя и входным звеном набора механических передач. Такое расположение электромагнитной муфты обусловлено желанием использовать небольшой передаваемый момент для уменьшения габаритов и тем, что в качестве механической передачи использована волновая передача с телами качения, имеющая высокий обратный КПД. Однако при таком расположении муфты невозможно обеспечить требуемую надежность, так как при отказе механической передачи она не отключается от объекта регулирования, что может привести, например, к его заклиниванию.
Резервированный электромеханический привод вращательного действия с электромагнитными муфтами обладает наибольшим количеством общих признаков и для предлагаемого изобретения принят за прототип.
Задача настоящего изобретения состоит в том, чтобы обеспечить в резервированных электромеханических приводах: отключение отказавшего и подключение исправного привода за короткое время; возможность работать двум двигателям привода одновременно с половинным моментом, проводить контроль работоспособности каждого привода на всех этапах задействования; повышение надежности привода.
Поставленная задача достигается тем, что резервированный электромеханический силовой минипривод, состоящий из нескольких исполнительных механизмов, каждый из которых содержит бескорпусные электрические двигатели, двухступенчатую волновую передачу с телами качения и электромеханическую муфту, при этом каждый исполнительный механизм дополнен вторым электродвигателем, расположенным тандемно с первым на общем валу, при этом каждый электродвигатель имеет датчики тока и положения ротора, общий вал роторов соединен с входным звеном первой ступени волновой передачи с телами качения, выходное звено второй ступени волновой передачи с телами качения соединено с входным валом электромеханической муфты, а выходной вал этой электромеханической муфты снабжен элементами крепления с нагрузкой, при этом электромеханическая муфта выполнена из двух полумуфт установленных в подшипниках относительно неподвижного корпуса, одна полумуфта является входным валом, а вторая выполнена составной, состоящей из промежуточного звена и выходного вала, внутренняя цилиндрическая поверхность промежуточного звена и наружная поверхность выходного вала снабжены шлицами с шариками, размещенными в сепараторе, так, что промежуточное звено имеет осевое перемещение относительно выходного вала, на торцевых поверхностях входного вала и промежуточного звена электромеханической муфты нарезаны зубья сцепления, на выходном валу, диаметрально, на непересекающихся осях к продольной оси на подшипниках размещены два эксцентрика с цилиндрическими выступами на торцах, оси которых расположены эксцентрично под углом 90 градусов друг к другу - одна горизонтально, другая вертикально, на этих цилиндрических выступах на подшипниках крепятся рычаги якорей электромагнитного включения и отключения, катушки этих электромагнитов закреплены соосно на выходном валу с противоположных сторон эксцентриков, каждая катушка электромагнитов выполнена с резервированной обмоткой, кроме того на одном из концов цилиндрических выступов каждого эксцентрика размещены рычаги фиксаторов с магнитами, на наружной поверхности промежуточного звена выполнена канавка, которая через ролики взаимодействует с движками двух микровыключателей контроля срабатывания электромеханической муфты, корпуса которых закреплены на корпусе электромеханической муфты.
На фиг. 1 показано продольное сечение резервированного электромеханического силового минипривода аэродинамической поверхности.
На фиг. 2 показана электромеханическая муфта без корпуса.
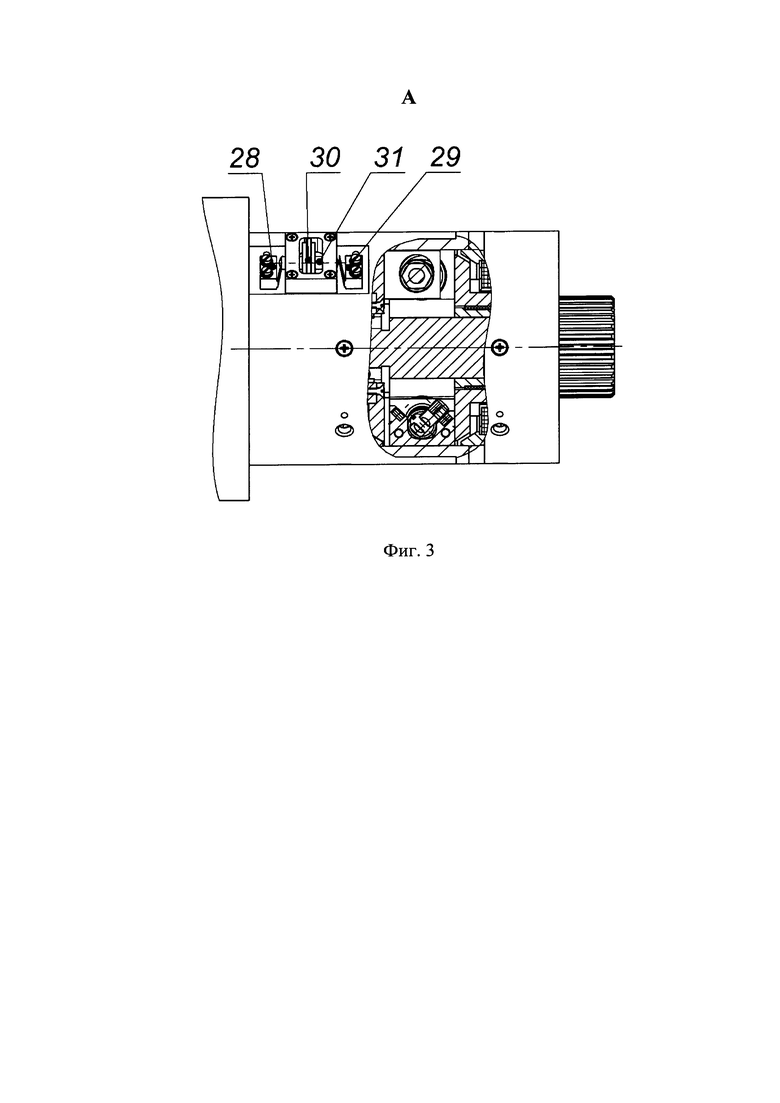
На фиг. 3 показана часть силового электромеханического привода с концевыми датчиками включения и выключения муфты (вид по стрелке А фиг. 2).
Резервированный электромеханический привод состоит из нескольких исполнительных механизмов, каждый из которых состоит из корпуса 1, двух электродвигателей, датчиков тока (на фигурах 1-3 не показаны), двух датчиков положения ротора 2, двухступенчатой волновой передачи и электромеханической муфты, расположенной между выходным звеном волновой передачи с телами качения и объектом управления, и датчика положения выходного звена.
Датчики положения выходного звена установлены на оси объекта управления и на фигурах не показаны.
Каждый электродвигатель содержит статор 3 и ротор 4, жестко закрепленный на общем валу 5 электродвигателей. Первая ступень волновой передачи включает в себя, дисковый волнообразователь, сепаратор 6, имеющий несколько рядов гнезд с размещенными в них телами качения 7, жесткое колесо 8 с внутренней профилированной поверхностью. Дисковый волнообразователь первой ступени волновой передачи с телами качения состоит из эксцентриков 9, неподвижно закрепленных на общем валу 5, подшипников 10 и дисков 11, сепаратор 6 неподвижно связан с корпусом 1, а жесткое колесо 8 является выходным звеном первой ступени.
Вторая ступень волновой передачи с телами качения содержит дисковый волнообразователь, сепаратор 12, имеющий несколько рядов гнезд с размещенными в них телами качения 13, жесткое колесо 14 с внутренней профилированной поверхностью. Дисковый волнообразователь второй ступени волновой передачи с телами качения состоит из эксцентриков 15, неподвижно закрепленных на наружной поверхности жесткого колеса 8 первой ступени, подшипников 16 и дисков 17, жесткое колесо 14 является частью неподвижного корпуса 1, а сепаратор 12 представляет собой выходное звено волновой передачи с телами качения и жестко связан с входным валом 18 электромеханической муфты.
Электромеханическая муфта состоит из двух полумуфт и концевых датчиков включения и отключения. Первая полумуфта является входным валом 18 с зубьями сцепления, а вторая включает в себя выходной вал 19 с эксцентриками 20, промежуточное звено, состоящее из якоря включения 21, катушки включения 22, якоря отключения 23, катушки отключения 24 и подвижной полумуфты 25 с зубьями сцепления. Катушка включения 22 и катушка отключения 24 имеют по две обмотки, или намотаны двумя проводами, каждый из которых имеет свои выводы. Внешняя поверхность выходного вала 19 и внутренняя поверхность подвижной полумуфты 25 снабжены шлицами с шариками 26, размещенными в сепараторе, так что промежуточное звено имеет осевое перемещение относительно выходного вала 19. Концевыми датчиками являются микровыключатели 28 и 29 и колесико 30 (см. фиг. 3), контактирующее с канавкой промежуточного звена. Колесико насажено на ось 31, так что при продольных перемещениях промежуточного звена, колесико 30 вызывает срабатывание микровыключателей 28 включения или 29 отключения.
Выходной вал электромеханической муфты 19, является выходным звеном привода.
Резервированный электромеханический привод работает следующим образом. Для перемещения выходного звена привода, на основании сигналов с датчиков положения ротора 2 осуществляется управление питанием обмоток статоров 3 обоих двигателей или одного из них, так что под действием электромагнитных сил приводятся во вращение роторы 4 электродвигателей, общий вал 5 электродвигателей и закрепленный на нем волнообразователь первой ступени волновой передачи с телами качения, диски 11 которого совершают полный оборот вокруг центральной оси привода за один оборот общего вала 5. Тела качения 7, размещенные в гнездах неподвижного сепаратора 6, могут перемещаться только в радиальном направлении и при движении дисков 7 совершают возвратно-поступательные движения с периодом, равным периоду одного оборота общего вала 5 электродвигателей и амплитудой, равной двойному расстоянию между центральной осью привода и осью дисков 11 волнообразователя первой ступени волновой передачи с телами качения (двойному эксцентриситету). Тела качения 7, взаимодействуя с внутренней профилированной поверхностью жесткого колеса 8, поворачивают его на угол меньший угла поворота общего вала 5 электродвигателей в число раз, равное числу периодов внутренней профилированной поверхности жесткого колеса 8.
Жесткое колесо 8 передает вращение на волнообразователь второй ступени волновой передачи с телами качения, диски 17 которого совершают полный оборот вокруг центральной оси привода за один оборот жесткого колеса 8. Тела качения 13, размещенные в гнездах сепаратора 12, могут перемещаться только в радиальном направлении и при движении дисков 17 совершают сложное движение, являющееся совокупностью вращательного и возвратно-поступательного движения вдоль гнезд сепаратора 12 с амплитудой, равной двойному расстоянию между продольной осью привода и осью дисков 17 волнообразователя второй ступени волновой передачи с телами качения (двойному эксцентриситету). Тела качения 13, взаимодействуя с внутренней профилированной поверхностью неподвижного жесткого колеса 14, поворачивают сепаратор 12 на угол, меньший угла поворота жесткого колеса 8 первой ступени волновой передачи с телами качения в число раз, на единицу меньшее числа периодов внутренней профилированной поверхности жесткого колеса 14 второй ступени. Вращение сепаратора 12 выходной ступени волновой передачи с телами качения передается жестко связанному с ним входному валу 18 электромеханической муфты.
Для соединения электромеханического привода с объектом регулирования на катушку включения 22 подается питание. Под действием электромагнитных сил якорь включения 21 и жестко связанная с ним подвижная полумуфта 25 притягиваются к катушке включения 22, вследствие чего вращение с входного вала 18 через зубчатое зацепление передается на подвижную полумуфту 25 и с нее через шлицевое соединение с шариками 26, размещенными в сепараторе 27, на выходной вал 19 электромеханической муфты. При перемещении подвижной полумуфты, сдвигается колесико 30 с осью 31 (см. фиг. 3), вызывая срабатывание микровыключателя 28, а якорь включения 21 поворачивает эксцентрик 20 на 90 градусов, фиксируя его магнитом в положении, препятствующем продольному перемещению подвижной полумуфты 25, что позволяет передавать момент вращения с входного вала 18 на выходной вал 19 электромеханической муфты без затрат энергии.
Для отсоединения привода от объекта регулирования, подается питание на катушку отключения 24 электромеханической муфты, вследствие чего, якорь отключения 23 притягивается к катушке отключения 24, разъединяя входной вал 18 и подвижную полумуфту 25. При перемещении подвижной полумуфты сдвигается колесико 30 с осью 31 (см. фиг. 3), вызывая отключение микровыключателя 28, а при достижении крайнего правого положения срабатывание микровыключателя 29, а якорь отключения 23 поворачивает эксцентрик 20 на 90 градусов, фиксируя его в положении, препятствующем продольному перемещению подвижной полумуфты 25. В выключенном состоянии электромеханической муфты, привод не препятствует перемещению объекта управления, так как жестко связанными с ним остаются только свободно вращающиеся выходной вал 19 с подвижной полумуфтой 25.
Таким образом, использование поэлементного резервирования электродвигателей и датчиков положения ротора наряду со структурным резервированием исполнительных механизмов в целом, а также расположение электромеханической муфты между выходным звеном двухступенчатой волновой передачи с телами качения и объектом управления обеспечивают: повышение надежности привода; возможность отключения отказавшего и подключения исправного исполнительного механизма привода за короткое время, зависящее от скорости срабатывания электромеханической муфты; возможность работать двум двигателям одновременно с половинным моментом; проводить контроль работоспособности каждого исполнительного механизма привода на всех этапах задействования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Резервированный электромеханический привод | 2020 |
|
RU2736658C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении | 2015 |
|
RU2611471C2 |
| СИЛОВОЙ МИНИ-ПРИВОД ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2408125C1 |
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ САМОЛЕТА | 2010 |
|
RU2442721C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СИЛОВОЙ МИНИ-ПРИВОД УПРАВЛЕНИЯ ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА С ФУНКЦИЕЙ СКЛАДЫВАНИЯ И РАСКРЫТИЯ СЕКЦИИ КРЫЛА | 2014 |
|
RU2565861C1 |
| Электромеханический рулевой привод вращательного действия | 2018 |
|
RU2678385C1 |
| СИЛОВОЙ МИНИПРИВОД (ВАРИАНТЫ) | 2004 |
|
RU2281597C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ПРЕДКРЫЛКА САМОЛЕТА | 2012 |
|
RU2522635C2 |
| Электромеханический привод | 2018 |
|
RU2722890C2 |


Изобретение относится к системам управления летательных аппаратов. Резервированный электромеханический силовой минипривод состоит из нескольких исполнительных механизмов, каждый из которых содержит бескорпусной электрический двигатель, двухступенчатую волновую передачу с телами качения и электромеханическую муфту. Каждый исполнительный механизм дополнен вторым электродвигателем, расположенным тандемно с первым на общем валу (5). Электромеханическая муфта выполнена из двух полумуфт. Одна полумуфта является входным валом (18). Вторая выполнена составной, состоящей из промежуточного звена и выходного вала (19). Внутренняя цилиндрическая поверхность промежуточного звена и наружная поверхность выходного вала (19) снабжены шлицами с шариками (26), размещенными в сепараторе (27), так, что промежуточное звено имеет осевое перемещение относительно выходного вала (19). На выходном валу, диаметрально, на непересекающихся осях к продольной оси на подшипниках размещены два эксцентрика (20) с цилиндрическими выступами на торцах, при этом на цилиндрических выступах на подшипниках крепятся рычаги якорей электромагнитного включения (21) и отключения (23). Достигается повышение надежности привода и увеличение ресурса. 3 ил.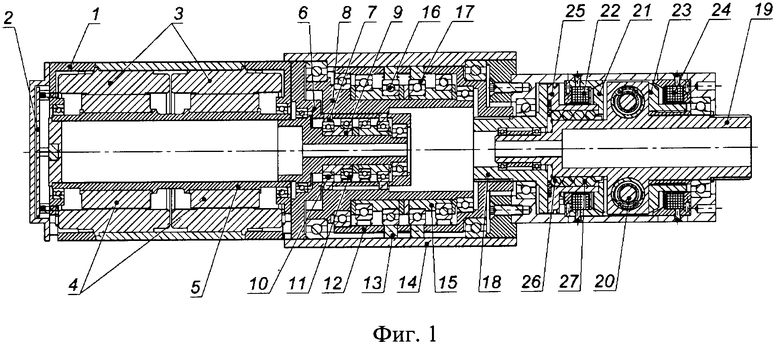
Резервированный электромеханический силовой минипривод, состоящий из нескольких исполнительных механизмов, каждый из которых содержит бескорпусные электрические двигатели, двухступенчатую волновую передачу с телами качения и электромеханическую муфту, отличающийся тем, что каждый исполнительный механизм дополнен вторым электродвигателем, расположенным тандемно с первым на общем валу, при этом каждый электродвигатель имеет датчики тока и положения ротора, общий вал роторов соединен с входным звеном первой ступени волновой передачи с телами качения, выходное звено второй ступени волновой передачи с телами качения соединено с входным валом электромеханической муфты, а выходной вал этой электромеханической муфты снабжен элементами крепления с нагрузкой, при этом электромеханическая муфта выполнена из двух полумуфт установленных в подшипниках относительно неподвижного корпуса, одна полумуфта является входным валом, а вторая выполнена составной, состоящей из промежуточного звена и выходного вала, внутренняя цилиндрическая поверхность промежуточного звена и наружная поверхность выходного вала снабжены шлицами с шариками, размещенными в сепараторе, так, что промежуточное звено имеет осевое перемещение относительно выходного вала, на торцевых поверхностях входного вала и промежуточного звена электромеханической муфты нарезаны зубья сцепления, на выходном валу, диаметрально, на непересекающихся осях к продольной оси на подшипниках размещены два эксцентрика с цилиндрическими выступами на торцах, оси которых расположены эксцентрично под углом 90 градусов друг к другу - одна горизонтально, другая вертикально, на этих цилиндрических выступах на подшипниках крепятся рычаги якорей электромагнитного включения и отключения, катушки этих электромагнитов закреплены соосно на выходном валу с противоположных сторон эксцентриков, каждая катушка электромагнитов выполнена с резервированной обмоткой, кроме того на одном из концов цилиндрических выступов каждого эксцентрика размещены рычаги фиксаторов с магнитами, на наружной поверхности промежуточного звена выполнена канавка, которая через ролики взаимодействует с движками двух микровыключателей контроля срабатывания электромеханической муфты, корпуса которых закреплены на корпусе электромеханической муфты.
| СИЛОВОЙ МИНИ-ПРИВОД ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2408125C1 |
| СИЛОВОЙ МИНИ-ПРИВОД | 2007 |
|
RU2321138C1 |
| ПРИВОД, УЗЕЛ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА, ЛЕТАТЕЛЬНЫЙ АППАРАТ, НАБОР ЧАСТЕЙ ПРИВОДА И СПОСОБ ПЕРЕМЕЩЕНИЯ ДЕТАЛИ | 2007 |
|
RU2440915C2 |
| US 20100213311 A1, 26.08.2010. | |||

