Изобретение относится к области машиностроения и может быть применено в приводах автоматических систем управления летательных аппаратов (ЛА), в частности в ЛА со складывающимися секциями крыла до и после полета.
Известны электромеханические приводы подвижных аэродинамических поверхностей вращательного действия, оси которых расположены вдоль или параллельно оси подвижной аэродинамической поверхности ЛА.
Например, патент США №4945779, кл. B64C 13/36 или авторское свидетельство SU 1812745, кл. B64C 13/28. Эти механизмы содержат передачу винт-гайка с большим количеством тел качения, двигающимся по замкнутым дорожкам сложной формы.
.Недостаток такого класса механизмов заключается в сложной многопоточной кинематике, при которой тела качения выходной ступени редуктора находятся в замкнутых дорожках с рециркуляцией шариков, что может привести к их заклиниванию.
Наиболее близким техническим решением (прототипом) предлагаемого устройства является силовой мини-привод подвижной аэродинамической поверхности ЛА (патент РФ №2408125, кл. B64D 31/14), который содержит электрический двигатель, многоступенчатый редуктор с выходной ступенью, построенной на основе многопарной волновой передачи с телами качения, имеющей входное звено, волнообразователь, выходное и промежуточное звенья. В рассматриваемой конструкции выходным звеном является сепаратор с телами качения, а промежуточным - застопоренное жесткое колесо.
Достоинством прототипа являются малые радиальные размеры, позволяющие размещать привод в качестве оси непосредственно внутри аэродинамической поверхности или параллельно ее оси вращения; простота конструкции; отсутствие опасности заклинивания; возможность использования привода в резервированных системах.
Однако такой привод можно использовать только для управления аэродинамической поверхностью, а для складывания секций крыла необходим отдельный привод.
Целью данного изобретения является расширение функциональных возможностей силового мини-привода управления аэродинамической поверхностью ЛА не только в полете, но и придания ему функции привода, обеспечивающего раскрытие и складывание секций крыла по команде системы управления соответственно до и после полета.
Указанная цель достигается тем, что между промежуточной и выходной ступенями редуктора введено электромагнитное стопорное устройство, подключенное так, что при его обесточенном состоянии жесткое колесо выходной ступени редуктора является выходным звеном и снабжено элементами крепления к аэродинамической поверхности непосредственно или через тягу, а сепаратор застопорен на корпус промежуточной ступени; при включенном состоянии электромагнитного стопорного устройства жесткое колесо застопорено на корпус промежуточной ступени, а сепаратор является выходным звеном выходной ступени редуктора, при этом ось сепаратора выходной ступени редуктора снабжена зубчатым коническим колесом, образующим коническую пару с зубчатым коническим колесом, посаженным на ось шарнира секции раскрытия и складывания крыла, закрепленную на неподвижную часть крыла.
Таким образом, введение электромагнитного стопорного устройства позволяет за счет поочередного стопорения жесткого колеса или сепаратора изменять кинематическую схему выходной ступени редуктора привода.
В режиме управления аэродинамической поверхностью ЛА в полете кинематическая схема содержит сепаратор с телами качения, застопоренный на корпус промежуточной ступени, а выходным звеном является жесткое колесо, снабженное элементами крепления с аэродинамической поверхностью непосредственно или через эксцентриковую втулку и тягу.
В режиме складывания или раскрытия секций крыла после или до полета ЛА кинематическая схема содержит жесткое колесо выходной ступени редуктора, застопоренное на корпус промежуточной ступени, а выходным звеном является сепаратор с телами качения, на оси которого установлено коническое колесо, образующее коническую пару с зубчатым коническим колесом, расположенном на оси шарнира складывания и раскрытия секций крыла.
Сущность предложенного технического решения поясняется чертежами, где изображены:
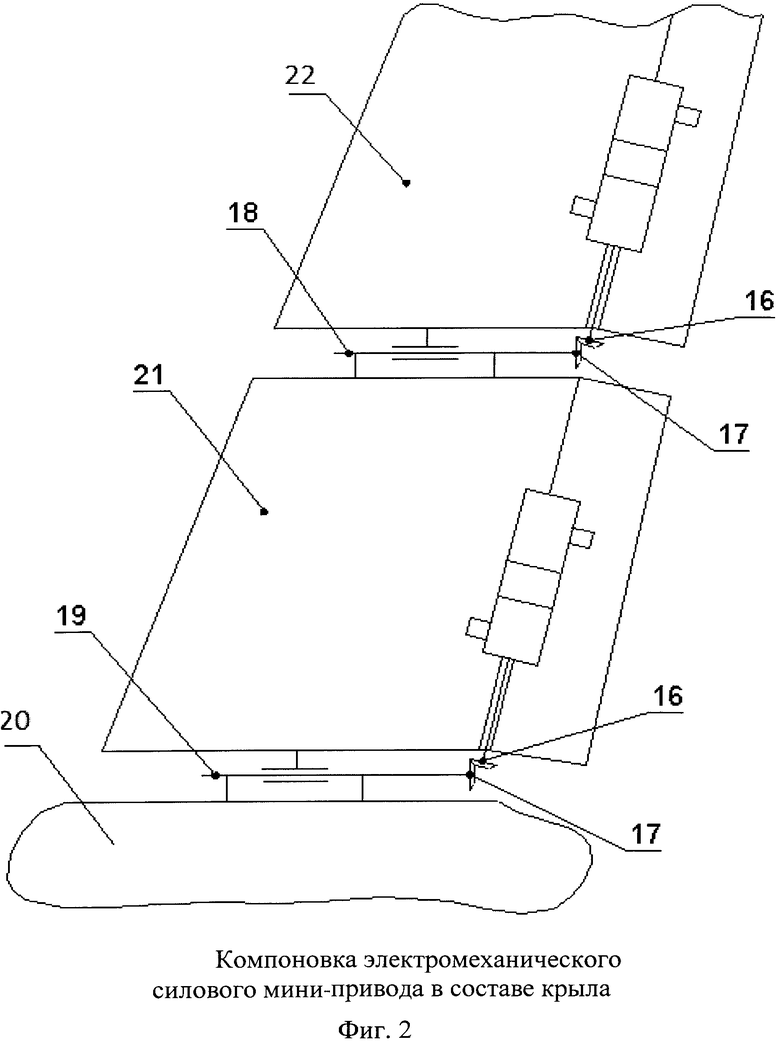
- на фиг. 1 показано продольное сечение выходной ступени редуктора силового мини-привода,
- на фиг. 2 показана компоновочная схема силового мини-привода с подвижной аэродинамической поверхностью ЛА в развернутом состоянии секций крыла.
Электромеханический силовой мини-привод содержит электрический двигатель 1, электромагнитную муфту 2, необходимую для резервирования систем, многоступенчатый редуктор и датчик положения 3 выходного звена привода.
Выходная ступень редуктора построена на основе трехзвенного механизма, состоящего из входного, промежуточного и выходного звеньев. При использовании в качестве такой передачи волновой с телами качения входным звеном является волнообразователь 4, а выходным и промежуточным звеньями могут являться сепаратор 5 с телами качения 6 или жесткое колесо, в зависимости от варианта кинематической схемы. При застопоренном сепараторе 5 выходным звеном является жесткое колесо 7, а при заторможенном жестком колесе 7 выходным звеном является сепаратор 5.
Передаточные числа в обеих кинематических схемах близки по величине, так как отличаются на разность числа впадин профиля жесткого колеса 7 и числа тел качения, находящихся в одном ряду сепаратора 5. Как правило, эта разница равна единице.
Между входной и промежуточной ступенями редуктора в корпусе 8 промежуточной ступени размещено электромагнитное стопорное устройство, состоящее из торообразного электромагнитного устройства 9 и стопорного диска 10 с цилиндрическими направляющими 11.
На торцовых поверхностях по обе стороны стопорного диска 10 нарезаны зубья 12 и 13. Зубья 13 могут образовывать жесткое зацепление с аналогичными зубьями 13, нарезанными в жестком колесе 7, а зубья 12 - с аналогичными зубьями 12, нарезанными на сепараторе 5. Стопорный диск 10 прижимается к жесткому колесу 7 пружиной 14.
Жесткое колесо 7 снабжено элементом крепления 15 к подвижной аэродинамической поверхности непосредственно или через тягу (на фиг. 1 не показана).
На оси сепаратора 5 установлено коническое колесо 16, образующее коническую пару с зубчатым коническим колесом 17 (фиг. 2), расположенным на осях шарниров 18, 19, закрепленных на неподвижных секциях крыла 20, 21, относительно которых осуществляется поворот складываемой и раскрываемой секций крыла соответственно 21, 22.
Электромеханический силовой мини-привод работает следующим образом. При обесточенном электромагните 9 стопорного устройства стопорный диск 10 вводится в зацепление сепаратором 5 пружиной 14, обеспечивая жесткую связь - стопорение сепаратора 5 на корпус 8 промежуточной ступени редуктора, образуя кинематическую схему связи выходной ступени с подвижным выходным жестким колесом 7 и застопоренным сепаратором 5.
При подаче напряжения на электромагнит 9 стопорного устройства стопорный диск 10 освобождается от сепаратора 5 и входит в зацепление с жестким колесом 7, переводя кинематическую схему выходной ступени редуктора в схему с подвижным выходным сепаратором 5 и неподвижным жестким колесом 7. При подаче управляющего сигнала на электродвигатель 1 он начинает поворачивать сепаратор 5 с коническим колесом 16 со скоростью, пропорциональной величине напряжения сигнала управления. При повороте сепаратора 5 с коническим колесом 16 на угол, необходимый для полного раскрытия или складывания секции крыла, который измеряется датчиком положения 3 этого выходного вала, сигнал управления отключается. Дополнительно к сигналу от датчика положения выходного вала могут быть использованы сигналы от концевых выключателей (на фиг.1 и 2 не показаны) положения подвижных секций крыла.
При отключении электромагнита 9 стопорного устройства стопорный диск 10 освобождается пружиной 14 от жесткого колеса 7 и входит в зацепление с сепаратором 5, переводя кинематическую схему выходной ступени редуктора в схему с выходным жестким колесом 7 и застопоренным сепаратором 5.
В процессе полета при подаче управляющего сигнала электродвигатель 1 поворачивает жесткое колесо 7 с аэродинамической поверхностью в заданном системой управления направлении и на заданную величину, которые измеряются датчиком 3 положения выходного вала, обеспечивая управление ЛА в следящем режиме.
Таким образом, предложенный электромеханический силовой мини-привод выполняет двойную функцию: складывания и раскрытия секций крыла после и до управляемого полета и управление подвижной аэродинамической поверхностью ЛА во время полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ МИНИ-ПРИВОД ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2408125C1 |
| Электромеханический рулевой привод вращательного действия | 2018 |
|
RU2678385C1 |
| СИЛОВОЙ МИНИ-ПРИВОД ПЕТЛЕОБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2519612C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ПРЕДКРЫЛКА САМОЛЕТА | 2012 |
|
RU2522635C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЗАКРЫЛКА САМОЛЕТА | 2012 |
|
RU2515014C2 |
| Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении | 2015 |
|
RU2611471C2 |
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ САМОЛЕТА | 2010 |
|
RU2442721C1 |
| Механизм управления аэродинамическими поверхностями | 2021 |
|
RU2776628C1 |
| ПОНИЖАЮЩИЙ ПЛАНЕТАРНЫЙ РЕДУКТОР МОТОР-КОЛЕСА | 1992 |
|
RU2049281C1 |
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
Изобретение относится к авиации и касается приводов автоматических систем управления летательных аппаратов (ЛА) со складывающимися секциями крыла до и после полета. Электромеханический силовой мини-привод подвижной аэродинамической поверхности ЛА с функцией складывания и раскрытия секций крыла состоит из электрического двигателя, многоступенчатого редуктора, выходная ступень которого содержит входное, промежуточное и выходное звенья волновой передачи с телами качения, и датчика положения выходного звена. При этом между промежуточной и выходными ступенями редуктора введено электромагнитное стопорное устройство, подключенное так, что при его обесточенном состоянии жесткое колесо выходной ступени редуктора является выходным звеном и снабжено элементами крепления к аэродинамической поверхности, а сепаратор застопорен на корпус промежуточной ступени. При включенном состоянии электромагнита стопорного устройства жесткое колесо застопорено на корпус промежуточной ступени, а сепаратор является выходным звеном выходной ступени редуктора. Достигается обеспечение складывания и раскрытия секций крыла после и до управляемого полета и управление подвижной аэродинамической поверхностью ЛА во время полета. 2 ил. 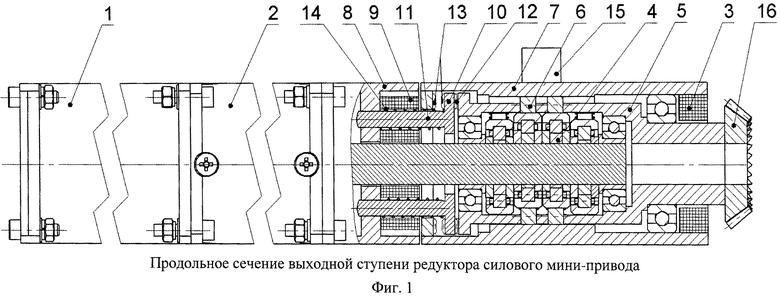
Электромеханический силовой мини-привод подвижной аэродинамической поверхности летательного аппарата с функцией складывания и раскрытия секций крыла, состоящий из электрического двигателя, многоступенчатого редуктора, выходная ступень которого содержит входное, промежуточное и выходное звенья волновой передачи с телами качения, и датчика положения выходного звена, расположенный вдоль - соосно или параллельно оси вращения аэродинамической поверхности, отличающийся тем, что с целью расширения функциональных возможностей между промежуточной и выходными ступенями редуктора введено электромагнитное стопорное устройство, подключенное так, что при его обесточенном состоянии жесткое колесо выходной ступени редуктора является выходным звеном и снабжено элементами крепления к аэродинамической поверхности непосредственно или через тягу, а сепаратор застопорен на корпус промежуточной ступени; при включенном состоянии электромагнита стопорного устройства жесткое колесо застопорено на корпус промежуточной ступени, а сепаратор является выходным звеном выходной ступени редуктора, при этом ось сепаратора выходной ступени редуктора снабжена зубчатым коническим колесом, образующим коническую пару с зубчатым коническим колесом, посаженным на ось шарнира секции раскрытия и складывания крыла, закрепленную на неподвижную часть крыла.
| СИЛОВОЙ МИНИ-ПРИВОД ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2408125C1 |
| US 4945779 A, 07.08.1990 | |||
| СПОСОБ ДИАГНОСТИКИ НЕОПУХОЛЕВЫХ ОБРАЗОВАНИЙ ЯИЧНИКОВ НА ПОЗДНИХ СРОКАХ БЕРЕМЕННОСТИ | 2009 |
|
RU2410695C1 |
| US 3038352 A, 12.06.1962 | |||
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ САМОЛЕТА | 2010 |
|
RU2442721C1 |

