Изобретение относится к системам обучения персонала рельсового транспорта и может быть использовано для обучения персонала специальных самоходных подвижных составов (далее - ССПС) работе на самоходных выправочно-подбивочно-рихтовочных машинах непрерывно-циклического действия.
Известен процедурный тренажер для обучения машинистов тягового подвижного состава, содержащий модуль управления обучающей симуляцией, средства управления машиниста, включая органы управления системами торможения и безопасности, средства воспроизведения обучающей симуляции, включая несколько сенсорных мониторов для отображения путевой обстановки [RU 198672 U1, дата публикации: 21.07.2020 г., МПК: G09B 9/02].
Известен тренажер машиниста железнодорожной техники, содержащий макет кабины локомотива, средства воспроизведения обучающей симуляции, включая несколько мониторов для формирования внекабинной обстановки, средства управления машиниста, копирующие панель управления электровоза, модуль управления обучающей симуляцией, включающий множество вариантов моделирования окружающей действительности [RU 148672 U1, дата публикации: 10.12.2014 г., МПК: G09B 9/04; G09B 9/052].
Преимуществом данных технических решения является создание обстановки максимально приближенной к реальному рабочему месту машиниста в кабине тягового подвижного состава, однако к недостаткам данных технических решений можно отнести отсутствие возможностей для обучения управлению рабочим органом специальных самоходных подвижных составов, что приводит к низкой эффективности обучения бригад специальных самоходных подвижных составов.
Известен также тренажер для машинистов подъемно-транспортных механизмов, содержащий средства воспроизведения обучающей симуляции, средства управления машиниста и оператора рабочего органа, включающие джойстики и пульт управления рабочими органами, модуль управления обучающей симуляцией, способный моделировать работу на железной дороге с помощью программного обеспечения [RU 116674 U1, дата публикации: 27.05.2012 г., МПК: G09B 9/00].
Преимуществом этого технического решения является возможность обучения управлению рабочими органами подъемно-транспортных механизмов, однако его недостатком является отсутствие возможности обучения управлению рабочими органами подъемно-транспортных механизмов, в частности органами ССПС, в условиях наиболее близких к реальному рабочему процессу и, как следствие, низкая эффективность обучения бригад специальных самоходных подвижных составов. Это обусловлено тем, что при выполнении работ, связанных с управлением рабочим органом ССПС, часто оператору требуется осуществлять манипуляции, находясь за пределами кабины локомотива, что, соответственно, сопровождается существенным изменением в визуальном восприятии ситуации, а также требует формирования навыков управления рабочим органом, находясь на различных местах относительно рабочего органа. Отсутствие возможности обучения данным навыкам может привести к тому, что после прохождения обучения на тренажере пользователь (а именно оператор) не сможет эффективно выполнять свою работу.
В качестве прототипа выбрана система для обучения персонала специального самоходного подвижного состава [RU 2771893 С1, дата публикации: 13.05.2022 г., МПК: G09B 9/04; G09B 9/04].
Это техническое решение содержит соединенные между собой средства воспроизведения обучающей симуляции и модуль управления обучающей симуляцией, макет кабины, содержащий подключенные к модулю управления обучающей симуляцией средства управления машиниста и средства управления оператора рабочего органа, средство удаленного управления оператора рабочего органа и средство удаленного воспроизведения обучающей симуляции, подключенные к модулю управления обучающей симуляцией, при этом средство удаленного управления оператора рабочего органа выполнено с возможностью направления команд в модуль управления обучающей симуляцией при расположении вне макета кабины, а средство удаленного воспроизведения обучающей симуляции выполнено с возможностью демонстрации обучающей симуляции при расположении вне макета кабины, в то время как модуль управления обучающей симуляцией выполнен с возможностью получения команд от средства удаленного управления оператора рабочего органа и направления команды об изменении демонстрируемой обучающей симуляции на средство удаленного воспроизведения обучающей симуляции в соответствии с полученными командами от средства удаленного управления оператора рабочего органа.
Это техническое решение обеспечивает достижение технического результата, заключающегося в обеспечении возможности обучения персонала навыкам управления ССПС во время перемещения по железным дорогам к месту выполнения работ, которые производятся на стоянке с помощью подъемно-транспортных механизмов, таких как крановое грузоподъемное оборудование или площадка монтажная. Поэтому оно не может быть применено для обучения персонала самоходного подвижного состава, таком как, например, выправочно-подбивочно-рихтовочные машины непрерывно-циклического действия (далее - выправочно-подбивочно-рихтовочные машины). Для этой машины характерна возможность движения в транспортном и рабочем режимах, причем рабочий режим может в свою очередь состоять из измерительного и выправочного режимов.
Однако известное техническое решение предназначено обучения персонала выполнении работ по управлению рабочим органом типа подъемно-транспортных механизмом, для которого характерно только на стоянке после перемещения ССПС к месту производства работ. Поэтому оно не может быть применено для обучения персонала самоходного подвижного состава, таком как, например, выправочно-подбивочно-рихтовочные машины. Для этой машины характерна возможность движения в транспортном и рабочем режимах, причем рабочий режим может в свою очередь состоять из измерительного и выправочного режимов.
Техническая проблема, на решение которой направлено изобретение, заключается в обеспечении возможности обучения персонала выправочно-подбивочно-рихтовочные машины на соответствующем тренажерном комплексе.
Сущность изобретения заключается в следующем.
Система для обучения персонала специального самоходного рельсового подвижного состава содержит соединенные между собой средства воспроизведения обучающей симуляции и модуль управления обучающей симуляцией, макет кабины, содержащий подключенные к модулю управления обучающей симуляцией средства управления машиниста и средства управления оператора рабочего органа. В отличие от прототипа, модуль управления обучающей симуляцией содержит модуль управления обучающей симуляции во время движения в транспортном режиме и модуль управления обучающей симуляции во время движения в рабочем режиме, причем модуль управления обучающей симуляции во время движения в рабочем режиме может содержать модули управления обучающей симуляции во время движения в измерительном и выправочном режимах.
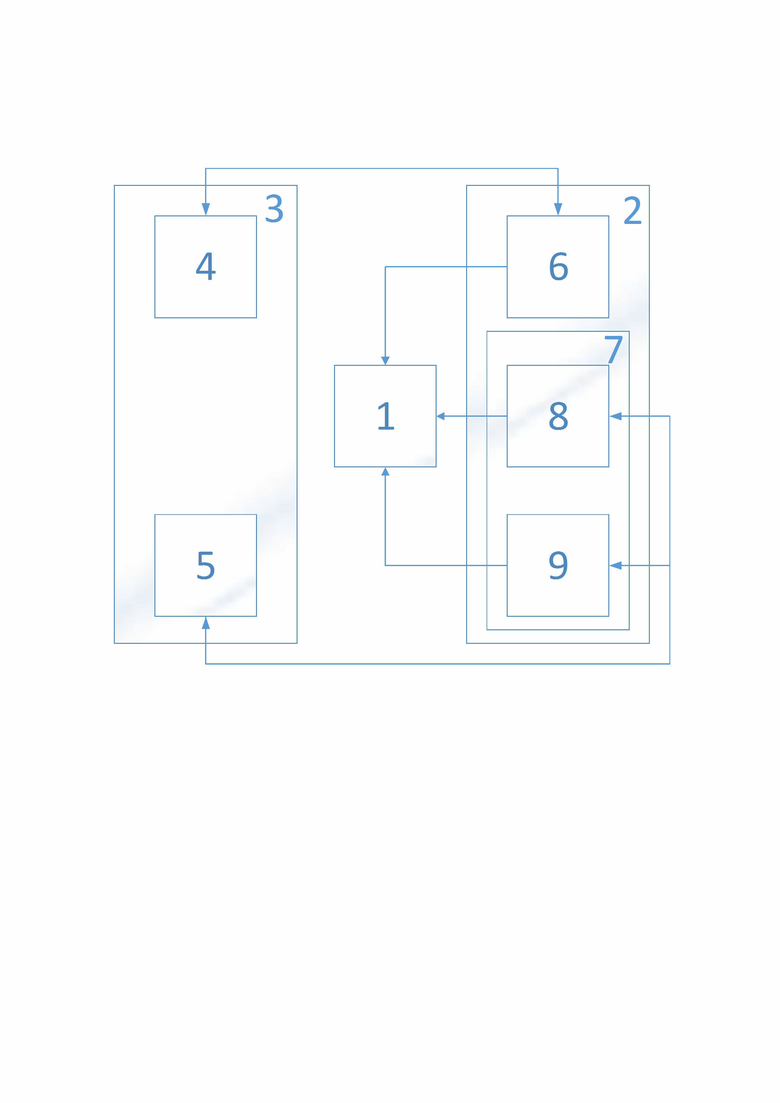
Изобретение поясняется фиг. 1, на которой представлен пример реализации структурной схемы системы для обучения персонала специального рельсового самоходного подвижного состава (ССПС).
Система содержит средства воспроизведения обучающей симуляции 1, подключенные к модулю управления обучающей симуляцией 2, макет кабины 3, содержащий подключенные к модулю управления обучающей симуляцией средства управления машиниста 4 и средства управления оператора рабочего органа 5. В отличие от прототипа, модуль управления обучающей симуляцией 2 содержит модуль управления обучающей симуляции во время движения в транспортном режиме 6, связанный со средствами управления машиниста 4 и модуль управления обучающей симуляции во время движения в рабочем режиме 7, который связан со средствами управления оператора рабочего органа 5, содержащими модули управления обучающей симуляции во время движения в измерительном 8 и выправочном 9 режимах.
Модуль управления обучающей симуляцией 2 может представлять собой компьютер или сервер, который находится в макете кабины или за его пределами и с помощью содержащегося в нем программного обеспечения формирует обучающую симуляцию и ее характеристики. Также модуль управления обучающей симуляцией может содержать базы данных, в которых могут храниться модели различных систем тягового подвижного состава, поезда, модели путевых устройств, модели устройств безопасности, модуль отображения путевой обстановки в виде оцифрованных видеофильмов и видеосцен в 3D-графике с имитируемыми звуковыми сигналами, а также модели рабочих органов специального самоходного подвижного состава.
Формирование обучающей симуляции модулем управления обучающей симуляцией 2 подразумевает обеспечение возможности моделировать модулем управления обучающей симуляцией показатели и характеристики объектов в обучающей симуляции, а также обеспечивать реалистичную обратную связь (посредством передачи команд на средства воспроизведения обучающей симуляции и средство удаленного воспроизведения обучающей симуляции) в ответ на действия пользователя в обучающей симуляции (передача данных в систему за счет взаимодействия пользователя со средствами управления машиниста и средствами управления оператора рабочего органа и/или средством удаленного управления оператора рабочего органа). Модуль управления обучающей симуляцией 2 выполнен с возможностью моделирования тяги, моделирования тормозов, моделирования динамических характеристик и схем ССПС, моделирования путевых устройств, моделирования рабочего органа, моделирования управления машинами, моделирования демонстрируемой обучающей симуляции, моделирования звуковых сигналов, а также моделирования иных процессов в обучающей симуляции, обеспечивающих возможность воссоздания реалистичной рабочей обстановки.
Возможность моделирования тяги и моделирования тормозов модулем управления обучающей симуляции 2 позволяет воссоздать реалистичную симуляцию хода и торможения подвижного состава, работу органов безопасности, а также обеспечивает ответную реакцию системы на действия пользователя через средства управления машиниста 4, что позволяет повысить эффективность обучения при помощи системы для обучения персонала специального самоходного подвижного состава.
Возможность моделирования динамических характеристик и схем позволяет задавать параметры определенной модели ССПС и обеспечивает их соблюдение в обучающей симуляции, в то время как моделирование путевых устройств служит для формирования интерактивного окружения в обучающей симуляции и настройки принципов его взаимодействия с пользователем, что повышает реалистичность обучающей симуляции и, как следствие, позволяет повысить эффективность обучения при помощи системы для обучения персонала специального самоходного подвижного состава.
Возможность моделирования рабочего органа и управления машинами служит для обеспечения восприятия команд пользователя от средств управления оператора рабочего органа, а также для реалистичной симуляции отображения и действий рабочего органа, которые передаются на средства воспроизведения обучающей симуляции. Данная возможность позволяет повысить реалистичность обучения управлению рабочим органом специального самоходного подвижного состава и повысить эффективность обучения.
Возможности моделирования демонстрируемой обучающей симуляции, моделирования путевых устройств и моделирования звуковых сигналов воссоздают реалистичную внекабинную обстановку обучающей симуляции, передаваемую на средства воспроизведения обучающей симуляции, которая может быть представлена видеосъемкой или 3D-графикой, звуковыми сигналами подвижного состава, шумами или другими звуками в обучающей симуляции, что, в свою очередь, повышает реалистичность обучения управлению рабочим органом специального самоходного подвижного состава.
Средства воспроизведения обучающей симуляции представляют собой устройства вывода информации, связанные с модулем управления обучающей симуляцией, расположенные внутри макета кабины так, чтобы демонстрировать внекабинную обстановку в обучающей симуляции пользователю (или пользователям), находящимся внутри макета кабины, реалистично моделировать пространство вокруг пользователя с помощью изображения и звука и выводить информацию о параметрах системы. Средства воспроизведения обучающей симуляции могут быть представлены мониторами, видеопроектором с экраном, акустическими колонками, элементами индикации, например, датчиками, и иными средствами вывода информации. При этом средства воспроизведения обучающей симуляции, выводящие информацию о параметрах системы, подразделяются на элементы индикации подвижного состава и элементы индикации рабочего органа. При взаимодействии пользователя с рабочими органами ССПС изнутри макета кабины, пользователь может наблюдать за движениями рабочего органа через мониторы, расположенные на месте оконных проемов макета кабины, и следить за показаниями параметров рабочего органа на элементах индикации.
Макет кабины представляет собой имитацию кабины специального самоходного подвижного состава, которая может быть выполнена в виде ширмы, сборно-разборного корпуса из любых материалов или иной имитации корпуса реальной кабины и служит для расположения средств управления машиниста, средств управления оператора рабочего органа, а также может служить для расположения средств воспроизведения обучающей симуляции и других элементов обстановки внутри кабины.
Под рабочим органом могут подразумеваться выправочно-подбивочно-рихтовочные машины или другие управляемые механизмы специального назначения для взаимодействия с внешними объектами, предназначенные для эксплуатации на рельсовых транспортных средствах.
Средства управления машиниста находятся внутри макета кабины, связаны с модулем управления обучающей симуляцией и служат для управления подвижным составом в обучающей симуляции. Средства управления машиниста могут быть выполнены в виде реального пульта управления специальным самоходным подвижным составом, а также в виде рычагов, джойстиков, сенсорных панелей и других средств, обеспечивающих возможность взаимодействия пользователя с обучающей симуляцией через модуль управления обучающей симуляцией.
Средства управления оператора рабочего органа находятся внутри макета кабины, связаны с модулем управления обучающей симуляцией и служат для управления рабочим органом специального самоходного подвижного состава. Средства управления оператора рабочего органа могут быть выполнены в виде стационарных пультов управления, сенсорных мониторов, джойстиков и других средств, обеспечивающих возможность контролировать рабочий орган в обучающей симуляции через модуль управления обучающей симуляцией.
Команда может характеризовать любое действие пользователя, требующее получение обратной связи внутри обучающей симуляции, например, управление каким-либо объектом в обучающей симуляции, запрос дополнительной информации или смены ракурса демонстрируемой обучающей симуляции.
Ракурс демонстрируемой обучающей симуляции подразумевает под собой вид демонстрируемой обучающей симуляции с определенной точки внутри обучающей симуляции. Возможность смены ракурса демонстрируемой обучающей симуляции обеспечивает возможность воссоздания реальных условий работы оператора и повышения эффективности обучения бригад специального самоходного рельсового подвижного состава, так как за счет возможности направления команд на смену ракурса демонстрируемой обучающей симуляции обеспечивается возможность повышения эффективности обучения навыкам управления рабочим органом.
Изобретение может быть выполнено из известных материалов с помощью известных средств, что свидетельствует о его соответствии критерию патентоспособности «промышленная применимость».
Изобретение характеризуется ранее неизвестными существенными отличительными признаками:
- модуль управления обучающей симуляцией содержит модуль управления обучающей симуляции во время движения в транспортном режиме и модуль управления обучающей симуляции во время движения в рабочем режиме;
- модуль управления обучающей симуляции во время движения в рабочем режиме может содержать модули управления обучающей симуляции во время движения в измерительном и выправочном режимах.
Совокупность отличительных признаков позволяет пользователю обучаться навыкам управления рабочим органом специального самоходного подвижного состава, контролируемым в обучающей симуляции, в условиях, приближенных к реальному рабочему процессу на железной дороге, когда оператор рабочего органа ССПС должен обучиться управлять его работой в измерительном и выправочном режимах, тем самым повышая эффективность обучения бригад специальных самоходных подвижных составов.
Таким образом, изобретение обладает ранее неизвестной из уровня техники совокупностью существенных признаков, что свидетельствует о соответствии изобретения критерию патентоспособности «новизна».
Из области техники, к которой относится заявляемое техническое решение, не известно применение средств обучающей симуляции для управления рабочим органом выправочно-подбивочно-рихтовочной машины в измерительном и выправочном режимах, не раскрыты признаки, характеризующие взаимодействие указанных средств с модулем управления обучающей симуляцией, а также не известен эффект от применения указанных признаков в отдельности и в совокупности, причем только их совместное использование обеспечивает достижение технического результата и решение технической проблемы, в то время как исключение какого-либо из признаков не приведет к пропорциональному снижению эффективности, а вовсе исключит возможность достижения какого-либо технического результата, что также, помимо неизвестности признаков как таковых, свидетельствует о наличии синергетического эффекта от их совместного применения. Это свидетельствует о соответствии изобретения критерию патентоспособности «изобретательский уровень».
Изобретение работает следующим образом.
В процессе эксплуатации системы для обучения персонала специального самоходного рельсового подвижного состава обучение пользователей навыкам управления движением и управления рабочим органом производится на максимально приближенных к оригинальным рабочим местам в макете кабины 3 с помощью средств управления машиниста 4 и средств управления рабочим органом 5, воздействующих на модули управления обучающей симуляции 6, 7 и 8 в модуле управления обучающей симуляции 2.
При этом путевую обстановку пользователи наблюдают с помощью средств воспроизведения обучающей симуляции 1. Для обучения пользователя технологии работы с рабочим органом первоначально выбирается измерительный режим, в процессе которого продолжается движение выправочно-подбивочно-рихтовочной машины с установленной нормами скоростью. В этом режиме моделируется проведение компьютерной съемки железнодорожного пути, предназначенного для его выправки, а затем моделируется обработка данных компьютерной съемки железнодорожного пути и внесение параметров для выправки, подбивки и рихтовки в компьютер, на котором моделируется работа выправочно-подбивочно-рихтовочной машины.
На следующем этапе обучения моделируется:
- выправка пути (подъем и установка рельсошпальной решетки в проектное положение с регулировкой ее в продольном и поперечном профилях, а также в плане);
- заполнение пустот в подшпальном пространстве и в междушпальных ящиках путем вибрирования виброплит машины (подбивание и уплотнение балластной призмы).
В завершении можно моделировать проверку качества выполненных работ в измерительном режиме работы.
В результате обеспечивается достижение технического результата, заключающегося в обеспечении возможности обучения персонала выправочно-подбивочно-рихтовочные машины во всех режимах работы на соответствующем тренажерном комплексе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для обучения персонала специального самоходного подвижного состава | 2021 |
|
RU2771893C1 |
| Система для обучения персонала самоходного снегоуборочного специального рельсового подвижного состава | 2023 |
|
RU2805578C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТРЕНАЖЕР МАШИНИСТА МАНЕВРОВОГО ТЕПЛОВОЗА | 2020 |
|
RU2807792C2 |
| ПУТЕВАЯ ВЫПРАВОЧНО-ПОДБИВОЧНАЯ МАШИНА | 1993 |
|
RU2111308C1 |
| Тренажерный комплекс подвижного состава | 2024 |
|
RU2835238C1 |
| СИМУЛЯЦИОННЫЙ КОМПЛЕКС ДЛЯ ОБСЛЕДОВАНИЯ БРЮШНОЙ ПОЛОСТИ C ПРИМЕНЕНИЕМ VR-СИМУЛЯЦИИ НА БАЗЕ КОМПЛЕКСНОЙ ТЕХНОЛОГИИ ТАКТИЛЬНОГО ТРЕКИНГА | 2022 |
|
RU2798405C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА | 2000 |
|
RU2194111C2 |
| ТРЕНАЖЕРНО-ОБУЧАЮЩАЯСЯ СИСТЕМА | 2024 |
|
RU2834774C1 |
| Динамический тренежёр краноманипулятора мастерской технического обслуживания и ремонта | 2023 |
|
RU2809961C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА | 2000 |
|
RU2193616C2 |
Изобретение относится к системам обучения персонала рельсового транспорта и может быть использовано для обучения бригад специальных самоходных подвижных составов (ССПС) вождению и управлению рабочим органом. Система для обучения персонала ССПС содержит макет кабины, соединенные между собой средства воспроизведения обучающей симуляции и модуль управления обучающей симуляцией, содержащий средства управления машиниста и средства управления оператора рабочего органа. Причем модуль управления обучающей симуляции во время движения в транспортном режиме связан со средствами управления машиниста, а модуль управления обучающей симуляции во время движения в рабочем режиме связан со средствами управления оператора рабочего органа, содержащими модули управления обучающей симуляции во время движения в измерительном и выправочном режимах. Обеспечивается возможность обучения персонала выправочно-подбивочно-рихтовочных машин во всех режимах работы. 1 ил.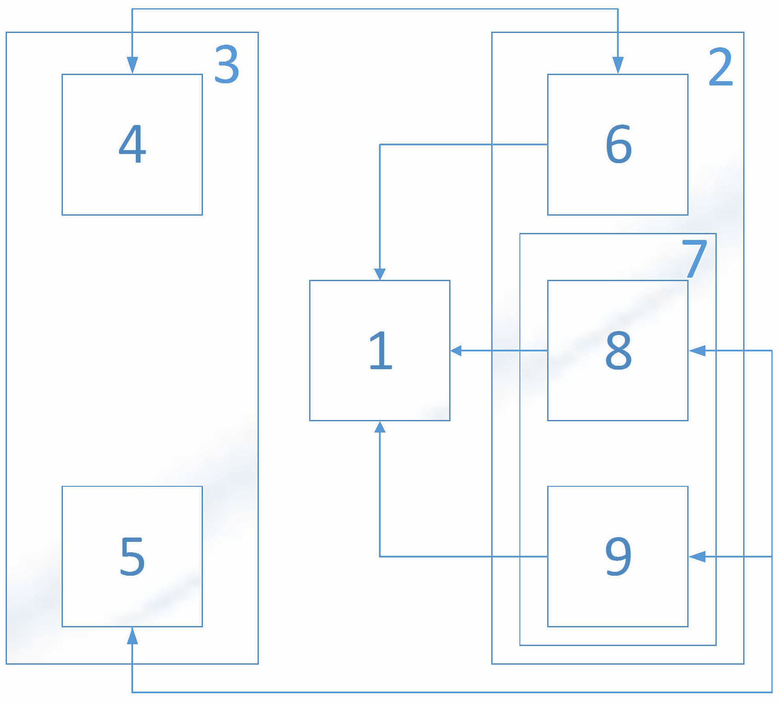
Система обучения персонала специального самоходного рельсового подвижного состава, содержащая средства воспроизведения обучающей симуляции, подключенные к модулю управления обучающей симуляцией, макет кабины, содержащий подключенные к модулю управления обучающей симуляцией средства управления машиниста и средства управления оператора рабочего органа, отличающаяся тем, что модуль управления обучающей симуляцией содержит модуль управления обучающей симуляции во время движения в транспортном режиме, связанный со средствами управления машиниста, и модуль управления обучающей симуляции во время движения в рабочем режиме, который связан со средствами управления оператора рабочего органа, содержащими модули управления обучающей симуляции во время движения в измерительном и выправочном режимах.
| Система для обучения персонала специального самоходного подвижного состава | 2021 |
|
RU2771893C1 |
| CN 108230817 B, 22.09.2020 | |||
| CN 108172060 A, 15.06.2018 | |||
| CN 107274745 A, 20.10.2017. | |||
