Изобретение относится к области машиностроения, в частности к техническим средствам обучения работе на погрузочно-разгрузочных средствах, используемым на подвижных мастерских технического обслуживания и ремонта вооружения и военной техники (ВВТ).
Известно погрузочно-разгрузочное устройство в виде краноманипулятора предназначенного для производства погрузо-разгрузочных, строительно-монтажных работ, а также перемещения людей в предусмотренной для этих целей рабочей платформе (люльке), (см. Руководство по эксплуатации «Краноманипуляторная установка с гибкой (канатной) подвеской грузозахватного органа. Кран-манипулятор». АО «ИНМАН» Россия, Республика Башкортостан, г. Ишимбай, ул. Первооткрывателей башкирской нефти, дом 2. Открытое издание. Ссылка доступа: https://rusavtogid.ru/d/1005501/d/re_kmu_inman_tros_062018.pdf).
Данный краноманипулятор используется в составе мастерской технического обслуживания и ремонта ВВТ мотострелкового (лайкового) батальона (МТО-1УБ), и позволяет производить грузоподъемные работы грузов массой до 2,4 т.(см. Описание Мастерская технического обслуживания и ремонта МТО-1УБ» Открытое издание. Ссылка доступа: Ссылка доступа: https://pr-t.ru/catalog/masterskie-tekhnicheskogo-obsluzhivaniya/masterskaya-tekhnicheskogo-obsluzhivaniya-i-remonta-vvt-motostrelkovogo-tankovogo-batalona-mto-ub1/).
Обучение работе специалистов по ремонту и обслуживанию ВВТ на краноманипуляторе производится в учебных частях Вооруженных Сил Российской Федерации (ВС РФ) непосредственно на самом краноманипуляторе, что сопряжено с определенными сложностями. Сложности выражаются в совершении множества ошибок, в связи с отсутствием у обучаемых первичных навыков управления этим достаточно сложным оборудованием и высокой вероятностью нарушения требований безопасности, а также порчи имущества.
В связи с отсутствием в материально-технической базе ВС РФ тренажерных средств обучения навыкам работы операторов на краноманипуляторе входящего в состав МТО-1УБ, необходима разработка технического средства обучения управлению крановыми операциями на данной машине.
Из уровня техники известен тренажер для обучения оператора грузоподъемного крана, содержащего: рабочее место с акустической системой и с аналоговыми и дискретными органами управления, механически связанными соответственно с аналоговыми и дискретными датчиками их положения, модуль имитации шума двигателя, группа выходов которого соединена с группой входов формирователя звуковых сигналов, группа выходов которого соединена с группой входов акустической системы, блок имитации визуальной обстановки, первая группа входов которого соединена с первой группой выходов модуля моделирования грузоподъемного крана, вторая группа выходов которого соединена с группой входов модуля имитатора шума двигателя, а первая группа выходов блока имитации визуальной обстановки соединена с группой входов устройства отображения визуальной информации, первая, вторая и третья группы выходов модуля управления программой соответственно соединены с первой группой входов модуля калибровки, со второй группой входов блока имитации визуальной обстановки и первой группой модуля моделирования грузоподъемного крана, вторая и третья группы входов которого соответственно соединена с первым выходом модуля калибровки и с первой группой выходов устройства согласования, вторая группа выходов последнего соединена со второй группой входов модуля калибровки, вторая группа выходов которого соединена с третьей группой входов блока имитации визуальной обстановки, вторая группа выходов которого соединена с четвертой группой входов модуля моделирования грузоподъемного крана, четвертая группа выходов последнего соединена с четвертой группой входов блока имитации визуальной обстановки, выходы аналоговых датчиков положения органов управления соединены с аналоговыми входами устройства согласования, дискретные входы последнего соединены с соответствующими выходами органов управления с переключающими элементами и датчиков дискретных органов управления, имитатор прибора безопасности и модуль моделирования прибора безопасности, первая группа выходов которого соединена с третьей группой входов устройства согласования, третья группа выходов последнего соединена с первой группой входов модуля моделирования прибора безопасности, вторые группы входов и выходов которого соответственно соединены с третьей группой выходов и пятой группой входов модуля моделирования грузоподъемного крана, четвертая группа выходов устройства согласования соединена с группой входов имитатора прибора безопасности, а его группа выходов соединена с группой дискретных входов устройства согласования, (см. «Тренажер для обучения оператора грузоподъемного крана». Описание к патенту РФ на полезную модель №137146 от 07.11.2012 г. Опубликовано: 27.01.2014 г. Бюл. №3. Авторы и патентообладатели: Погосян К.Р., Погосян Э.Р. Открытое издание).
Известное устройство позволяет осуществлять качественное обучение оператора (крановщика) грузоподъемного крана на данном тренажере.
Кроме того, известно устройство в виде симулятора подъемного крана, строительной машины или вилочного погрузчика, содержащего: средства ввода команд управления, графический модуль симуляции для расчета виртуального отображения окружающей строительную машину среды и/или видимых из кабины управления машинных компонентов, а также с устройством индикации рассчитанного виртуального отображения. Модуль симуляции движения предназначен для определения движений и/или деформации машинных компонентов, например стрелы крана или грузового крюка, в зависимости от введенных команд управления, а графический модуль симуляции выполнен для расчета виртуального отображения в зависимости от определенных движений и/или деформации. Модуль симуляции движений включает устройство эмуляции данных для эмуляции данных движения симулированной техники. Устройство эмуляции данных включает компонент сервопривода для выполнения установочного движения привода в зависимости от введенной в кабине управления команды управления. Графическое устройство симуляции выполнено для генерирования виртуального отображения с учетом выполненного установочного движения привода. Предложены также применение симулятора в качестве устройства дистанционного управления подъемным краном, строительной машиной или вилочным погрузчиком, а также система, содержащая симулятор, а также подъемный кран, строительную машину или вилочный погрузчик, (см. «Симулятор подъемного крана, строительной машины или вилочного погрузчика». Описание к патенту РФ на изобретение №2730697 от 10.01.2017 г. Опубликовано: 25.08.2020 г. Бюл. №4. Авторы: Палберг М, Реш Ю., Брандт С., Штайб Т. Патентообладатель: ЛИБХЕРР-КОМПОНЕНТС БИБЕРАХ ГМБХ (DE). Открытое издание. Прототип).
Данное устройство обеспечивает реалистичную симуляцию работы подъемного крана или техники, повышая эффективность процесса тренировки и обеспечивающее лучшее понимание, и возможность более легкого обучения реальной работе подъемного крана или техники.
Общим недостатком вышеуказанных устройств, как аналога, так и прототипа является то, что все они по конструкции существенно отличаются от краноманипулятора МТО-1УБ, и подготовка на них специалистов именно для эксплуатации краноманипулятора МТО-1УБ не даст высоких результатов обучения.
Задачей настоящего изобретения является разработка динамического тренажерного устройства, позволяющего привить навыки в работе на краноманипуляторе МТО-1УБ, обеспечив эффективность и реалистичность обучения.
Техническим решением предложенного изобретения является использование в составе устройства: корпуса с размещенными в нем пультом управления, исполнительных элементов в виде привода поворотного механизма, поворотного механизма, понижающего редуктора, подъемного механизма троса, подъемного механизма краноманипулятора, краноманипулятора, роликов, троса с крюком, источника питания, пульта управления, домкратных механизмов и электропроводов.
Техническим результатом предложенного изобретения является возможность в обеспечении обучаемым привития навыков в управлении краноманипуляторной установки мастерской технического обслуживания и ремонта вооружения и военной техники, снижение случаев травматизма личного состава, и порчи имущества при выполнении погрузочно-разгрузочных работ.
При этом сущность работы динамического тренажера краноманипулятора мастерской технического обслуживания и ремонта заключается в том, что машина, обучаемый навыкам управления оператор располагается непосредственно около органов управления, при помощи которых управляет сигналами, поступающими от источника питания на исполнительные элементы, приводящие в действие краноманипулятор с тросом и крюком.
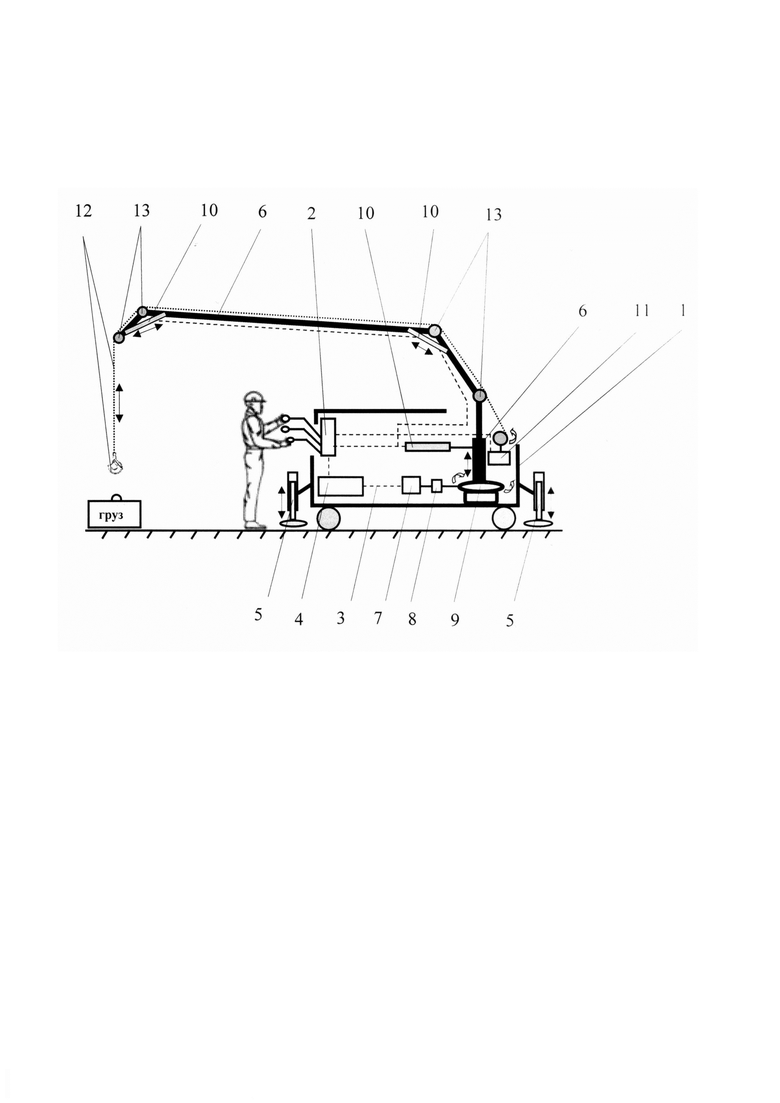
Изобретенеи поясняется фигурой на которой показан динамический тренажер краноманипулятора мастерской технического обслуживания и ремонта, где: 1 - корпус; 2 - пульт управления; 3 - электропровода; 4 - источник питания; 5 - домкратные механизмы; 6 - краноманипулятор; 7 привод поворотного механизма; 8 - понижающий редуктор; 9 - поворотный механизм; 10 - подъемный механизм краноманипулятора; 11 - подъемный механизм троса; 12 - трос с крюком; 13 - ролики.
Для формирования у оператора навыков в управлении краноманипулятора мастерской технического обслуживания используется динамический тренажер, включающий в своем составе корпус, предназначенный для размещения в нем составных элементов краноманипулятора. Корпус может быть выполнен на колесном шасси с возможностью транспортирования методом буксирования. В корпусе размещается поворотный механизм, представляющий собой сварную конструкцию в виде двух металлических дисков, расположенных один над другим, между которыми имеются подшипники качения, один диск (нижний) неподвижно прикреплен к корпусу, а второй (верхний) свободно вращается относительно нижнего и имеет внешний зубчатый сектор. Сверху, к верхнему диску крепится краноманипулятор, представляющий собой сварную конструкцию в виде нескольких подвижных друг относительно друга металлических балок, соединенных подъемными механизмами краноманипулятора. Балки имеют свободно вращающиеся на осях ролики, по которым обкатывается трос. К одному концу троса крепится крюк для крепления грузов, а другой конец соединен с маховиком подъемного механизма.
Привод подъемного механизма краноманипулятора (электромеханического типа) предназначен для преобразования электрического сигнала, поступающего на него по электропроводам от источника питания в поступательное движение его штока, механически воздействующего на металлические балки краноманипулятора, изменяя его вертикальное положение (поднимая и опуская).
Подъемный механизм троса представляет собой электродвигатель с маховиком, на который наматывается трос с крюком, проходящий по роликам.
Привод поворотного механизма также представляет собой электродвигатель, приводящий в движение через понижающий редуктор поворотный механизм, в частности его верхний диск посредством обкатки по его зубчатому сектору шестерни понижающего редуктора.
Все потребители электроэнергии по электропроводам запитываются от источника питания, представляющего собой аккумуляторные батареи, размещаемые в корпусе.
При помощи пульта управления, имеющего органы управления в виде рычагов, регулируются электрические сигналы, передаваемые по электропроводам от источника питания на все потребители электроэнергии (исполнительные элементы).
Домкратные механизмы (электромеханического типа) предназначены для придания корпусу горизонтального и устойчивого положения в пространстве, для исключения случаев опрокидывания краноманипулятора. Он также управляется оператором при помощи пульта управления.
Пример работы устройства. Оператор, располагаясь рядом с корпусом 1 тренажера, посредством пульта управления 2 управляет сигналами, передающимися по электропроводам 3 от источника питания 4 на домкратные механизмы 5, для придания краноманипулятору 6 устойчивого положения в пространстве. Также посредством привода поворотного механизма 7 через понижающий редуктор 8 воздействует на поворотный механизм 9 для вращения краноманипулятора 6. При помощи пульта управления 2 управляет передачей сигналов передающихся по электропроводам 3 на подъемный механизм краноманипулятора 10, регулируя углы наклона краноманипулятора 6. При подаче сигнала по электропроводам 3 от источника питания 4 на подъемный механизм троса 11 опускает, или поднимает трос с крюком 12, который обкатывается по роликам 13 краноманипулятора 6.
Таким образом, устройство позволяет вырабатывать оператору навыки в управлении краноманипулятором мастерской технического обслуживания, сохранив при этом ресурс самой мастерской технического обслуживания и ремонта вооружения и военной техники, в составе которой имеется краноманипулятор.
Литература:
1. Руководство по эксплуатации «Краноманипуляторная установка с гибкой (канатной) подвеской грузозахватного органа. Кран-манипулятор». АО «ИНМАН» Россия, Республика Башкортостан, г. Ишимбай, ул. Первооткрывателей башкирской нефти, дом 2. Ссылка доступа: https://rusavtogid.ru/d/1005501/d/re_kmu_inman_tros_06201 8.pdf. Открытое издание.
2. Описание Мастерская технического обслуживания и ремонта МТО-1УБ» Открытое издание. Ссылка доступа: Ссылка доступа: https://pr-t.ru/catalog/masterskie-tekhnicheskogo-obsluzhivaniya/masterskaya-tekhnicheskogo-obsluzhivaniya-i-remonta-vvt-motostrelkovogo-tankovogo-batalona-mto-ub1/
3. «Тренажер для обучения оператора грузоподъемного крана». Описание к патенту РФ на полезную модель №137146 от 07.11.2012 г. Опубликовано: 27.01.2014 г. Бюл. №3. Авторы и патентообладатели: Погосян К.Р., Погосян Э.Р. Открытое издание.
4. «Симулятор подъемного крана, строительной машины или вилочного погрузчика». Описание к патенту РФ на изобретение №2730697 от 10.01.2017 г. Опубликовано: 25.08.2020 г. Бюл. №4. Авторы: Палберг М, Реш Ю., Брандт С., Штайб Т. Патентообладатель: ЛИБХЕРР-КОМПОНЕНТС БИБЕРАХ ГМБХ (DE). Открытое издание.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИМУЛЯТОР ПОДЪЕМНОГО КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ ИЛИ ВИЛОЧНОГО ПОГРУЗЧИКА | 2017 |
|
RU2730697C2 |
| Система для обучения персонала специального самоходного подвижного состава | 2021 |
|
RU2771893C1 |
| Система для обучения персонала самоходного снегоуборочного специального рельсового подвижного состава | 2023 |
|
RU2805578C1 |
| Система обучения персонала специального самоходного рельсового подвижного состава | 2023 |
|
RU2801838C1 |
| МОБИЛЬНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ХРАНЕНИЯ ВООРУЖЕНИЯ И ВОЕННОЙ ТЕХНИКИ, ВОЕННОГО ИМУЩЕСТВА И ЗАПАСНЫХ ЧАСТЕЙ В ЗАЩИТНОЙ СРЕДЕ | 2007 |
|
RU2360207C2 |
| Подвижный подъемник для автомобилей | 1989 |
|
SU1721000A1 |
| СПОСОБ ОБУЧЕНИЯ ИЛИ ПОВЫШЕНИЯ КВАЛИФИКАЦИИ ЛЕТНОГО И/ИЛИ ДИСПЕТЧЕРСКОГО СОСТАВА ВЕДЕНИЮ РАДИОПЕРЕГОВОРОВ НА АНГЛИЙСКОМ ЯЗЫКЕ | 1999 |
|
RU2175783C2 |
| Трансформируемая образовательная платформа симуляционного экзамена и тренинга (ТОПСЭТ) | 2021 |
|
RU2761714C1 |
| Комплект учебных стендов-тренажеров для изучения конструкции агрегатов и узлов электромобиля | 2024 |
|
RU2838715C1 |
| ТРЕНАЖЕР ПОКИДАНИЯ ТОНУЩЕГО ВЕРТОЛЕТА | 2017 |
|
RU2655570C1 |
Изобретение относится к области машиностроения, в частности к техническим средствам обучения работе на погрузочно-разгрузочных средствах, используемым на подвижных мастерских технического обслуживания и ремонта вооружения и военной техники. Динамический тренажер краноманипулятора мастерской технического обслуживания и ремонта, характеризующийся тем, что в корпусе содержит краноманипулятор, имеющий возможность вращения вокруг своей оси за счет размещенного в корпусе и прикрепленного к его нижней части поворотного механизма, который соединен через понижающий редуктор с приводом поворотного механизма, связанного с источником питания через пульт управления электропроводами. Краноманипулятор имеет возможность изменять углы наклона в вертикальном направлении за счет связанного электропроводами подъемного механизма краноманипулятора с источником питания и с краноманипулятором через пульт управления. Опускание и поднимание троса с крюком, проходящего через ролики, размещаемые на краноманипуляторе, производится посредством прикрепленного к краноманипулятору подъемного механизма троса, связанного так же, как и прикрепленных к корпусу домкратных механизмов, через электропровода с источником питания и пультом управления. Повышается уровень подготовки обучаемых. 1 ил.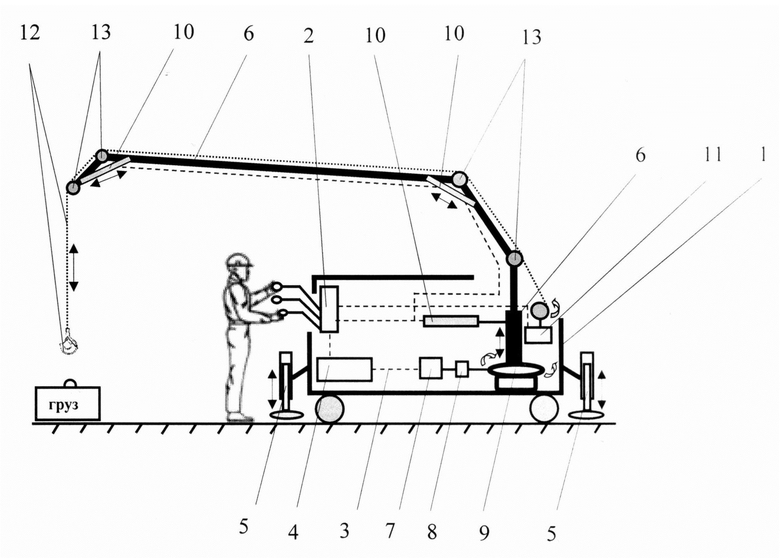
Динамический тренажер краноманипулятора мастерской технического обслуживания и ремонта, характеризующийся тем, что в корпусе содержит краноманипулятор, имеющий возможность вращения вокруг своей оси за счет размещенного в корпусе и прикрепленного к его нижней части поворотного механизма, который соединен через понижающий редуктор с приводом поворотного механизма, связанного с источником питания через пульт управления электропроводами, кроме того краноманипулятор имеет возможность изменять углы наклона в вертикальном направлении за счет связанного электропроводами подъемного механизма краноманипулятора с источником питания и с краноманипулятором через пульт управления, при этом опускание и поднимание троса с крюком, проходящего через ролики, размещаемые на краноманипуляторе, производится посредством прикрепленного к краноманипулятору подъемного механизма троса, связанного так же, как и прикрепленных к корпусу домкратных механизмов, через электропровода с источником питания и пультом управления.
| СИМУЛЯТОР ПОДЪЕМНОГО КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ ИЛИ ВИЛОЧНОГО ПОГРУЗЧИКА | 2017 |
|
RU2730697C2 |
| Способ изготовления пластин свинцового аккумулятора | 1960 |
|
SU137146A1 |
| CN 104616558 A, 13.05.2015 | |||
| Кран-манипулятор | 1969 |
|
SU484172A1 |
