Изобретение относится к области медицины и предназначено для предоперационного планирования и проведения тренировочной хирургической операции, а именно ретроградной интраренальной хирургии камней почек с лазерной литотрипсией, а также для обучения навыкам эндоурологических манипуляций молодых специалистов, с использованием трехмерной модели полостной системы почки и камня пациента сгенерированной по данным компьютерной томографии пациента, при помощи рукоятки-контроллера, с модулем управления, включающим блок датчиков, регистрирующих изменение положения элементов, имитирующих рабочий орган гибкого уретероскопа, и средство преобразования полученных данных от датчиков в угол поворота изображения, полученного от виртуального зонда гибкого уретероскопа.
Мочекаменная болезнь является распространенным заболеванием, затрагивающее более 10% населения Российской Федерации. Несмотря на определение факторов риска и эффетивных мер по профилактике, до сих пор значимая часть таких больных требует оперативного лечения, что подчеркивает важность освоения урологами всех имеющихся хирургических пособий. В настоящее время открытая хирургия камней верхних мочевых путей практически полностью заменилась мини-инвазивными вмешательствами, такими как перкутанная нефролитотрипсия (ПНЛ) и ретроградная интраренальная хирургия (РИРХ), каждое из которых представляет собой совокупность отдельных этапов, опосредующих успех всей операции.
В процессе освоения молодыми специалистами эндоурологических манипуляций существует ряд проблем, такие как значимая кривая обучения и необходимость обеспечения безопасности пациентов.
Из уровня техники известны способы планирования операций с использованием виртуальных трехмерных моделей почек пациентов, например, известно техническое решение из патента US 8500451 (В2), опубликованного 06.08.2013, в котором раскрыты устройство и способ моделирования тренировочной хирургической операции на сосудах (ангиопластики) с использованием 3д модели сгенерированной на основе данных медицинских изображений реального пациента. Способ включает получение с помощью системы ввода 3д модели сосудов конкретного пациента сгенерированных на основе массива данных исследования (КТ) пациента, моделирование тренировочной хирургической операции с использованием полученной 3д модели сосудов пациента, при этом система моделирования принимает и обрабатывает сигналы, полученные от блока отслеживания имитаторов интервенционных инструментов и отправляет сигналы на блок генерации силовой обратной связи.
Изобретение предназначено для предоперационного планирования и репетиции хирургической операции на сосудах, что не позволяет его использовать для планирования и обучения навыкам ретроградной интраренальной хирургической операции для лечения мочекаменной болезни.
Также из патента US 10716626 B2, опубликованного 29.12.2016, известен способ, реализованный на вычислительном устройстве, имеющем по меньшей мере один процессор, хранилище и коммуникационную платформу, способную подключаться к сети для определения одного или нескольких измерений, связанных с почкой, причем способ включает получение трехмерного (3D) изображения почки, визуализацию трехмерного изображения в трехмерном виртуальном пространстве, прием ввода от пользователя, причем ввод соответствует прямому взаимодействию пользователя в трехмерном виртуальном пространстве и указанию местоположения по отношению к представлению почки в визуализируемом трехмерном изображении, рендеринг представления инструмента в виртуальном трехмерном пространстве на основе местоположения, автоматическое выравнивание в трехмерном виртуальном пространстве представления инструмента с воронкообразным путем чашечки в месте расположения относительно почки на основе полученных данных от пользователя, визуализацию графического расширения линии от представления инструмента в виртуальном трехмерном пространстве для визуализации выравнивания представления инструмента; а также определение одного или более измерений, относящихся к почке, на основе местоположения и анатомической структуры почки.
Недостатком данного технического решения является то, что оно предназначено для планирования только чрезкожных вмешательств, отсутствует возможность проведения тренировочной ретроградной интраренальной хирургической операции для лечения мочекаменной болезни.
В уровне техники известны способы обучения или тренировки хирургических навыков, в которых используются настоящие инструменты, например, портативный симуляционный тренажер для развития мануальных навыков в лапароскопической хирургии, известный из патента RU 2768590 C1, опубликованного 24.03.2022, или тренажер для отработки эндоскопических навыков, в том числе, трансуретальной литотрипсии, описанный по ссылке http://medbuy.ru/medicinskij-trenazher-simulyator/simbionix-uroperc-mentor.
Недостатки указанных способов заключаются в том, что они предназначены по большей части для использования шаблонных анатомических реконструкций, представляющих собой стандартизированные анатомические модели и не подходят, например, для планирования операций.
Техническая проблема, решаемая заявленным способом, заключается в расширении арсенала обучающих технических средств для отработки навыков ретроградной интраренальной хирургии с использованием устройства, имитирующего работу настоящего рабочего гибкого уретероскопа, позволяющего подключать его напрямую к ПК и применять его с виртуальными моделями, загруженными в графическую оболочку ПО, установленного на любом персональном компьютере.
Техническим результатом патентуемого изобретения является разработка способа отработки мануальных навыков начинающих хирургов, а также для опытных хирургов при планировании операций с использованием гибкого уретероскопа, без необходимости использования физических моделей за счет возможности использования устройства с виртуальными моделями посредством модуля датчиков положения, регистрирующего величины изменения положения подвижных единиц устройства, и связанного с ним модуля управления, передающего данные от датчиков на ПК.
Заявленный технический результат достигается за счет способа виртуальной симуляции ретроградной интраренальной хирургии для лечения мочекаменной болезни, применяемый при обучении навыкам эндоурологических манипуляций и при планировании операций с использованием гибкого уретероскопа, характеризующегося тем, что получают данные, содержащие информацию об исследовании пациента с применением 3D визуализации, выделяют и определяют из этих данных путем фильтрации массива данных исследования в диапазоне плотностей, соответствующих содержимому полостной системы почки и камня, на основании полученных данных создают 3D модель полостной системы почки пациента и 3D модель камня и сохраняют их в памяти устройства или облачном хранилище в формате, применимом для хранения трехмерных моделей объектов, передают и используют созданную на предыдущем шаге трехмерную модель полостной системы почки и камня пациента для последующего моделирования тренировочной хирургической операции, включающей запуск программы на ПК с графической оболочкой, в которую загружают файл с полостью 3D моделью почки и файл с 3D моделью камня, изменяют отображение участка, имитируя перемещение виртуального гибкого уретероскопа внутри 3D модели начиная с верхней трети мочеточника, при этом имитацию круговых и вращательных движений виртуального зонда гибкого уретероскопа осуществляют посредством контроллера, подключенного к ПК и включающего рукоять с рычагом и блоком датчиков, один из которых регистрирует угол поворота рукояти вокруг продольной оси, а другой регистрирует угол поворота рычага, передают полученные данные в микроконтроллер, который преобразует их в величину угла, на который необходимо отклонить виртуальный зонд в графическом интерфейсе ПО, и далее передаются на ПК, а имитацию поступательных движений осуществляют посредством кнопок многокнопочного устройства, с помощью которого также осуществляют передачу команды ПК на имитацию лазерной литотрипсии и удаления камней виртуальной корзинкой.
В частном случае осуществления изобретения отклонение сдвигаемого рычага вверх до 90(соответствует отклонению изображения с виртуального зонда внутри 3D модели полостной системы почки в графическом интерфейсе ПО на ПК вниз до -270°, а отклонение сдвигаемого рычага вниз до -90(соответствует отклонению изображения вверх до 270°.
В частном случае осуществления изобретения отклонение сдвигаемого рычага определяют посредством магнитного энкодера, установленного напротив поворотной части рычага, на которой закреплен неодимовый магнит.
В частном случае осуществления изобретения вращение рукояти влево до -180(соответствует вращению изображения влево до -180°, а вращение рукояти вправо до 180(соответствует вращению изображения вправо до 180°.
В частном случае осуществления изобретения угол поворота рукояти вокруг своей продольной оси определяют посредством датчика, представляющего собой акселерометр, установленный на модуле управления.
В частном случае осуществления изобретения имитацию перемещения виртуального зонда вперед-назад осуществляют с помощью кнопок «↓» и «↑» на мультикнопочном устройстве.
В частном случае осуществления изобретения с нажатием кнопки “1” на мультикнопочном устройстве на ПК передается команда на отображение в графической оболочке программы кончика лазера, после чего все предыдущие команды от контроллера и мультикнопочного устройства на перемещение, включая круговые, вращательные и поступательные, применяются к кончику лазера, нажатие на мультикнопочном устройстве кнопки “2” дает команду на включение или выключение лазера для дробления, нажатие кнопки “3” на мультикнопочном устройстве дает команду на выбор режима дробления - фрагментация/распыление, нажатие кнопки “4” - на активирование дробления.
В частном случае осуществления изобретения с нажатием кнопки “5” на мультикнопочном устройстве на ПК передается команда на отображение в графической оболочке программы кончика виртуальной эндоурологической корзинки, после чего все предыдущие команды от контроллера и мультикнопочного устройства на перемещение, включая круговые, вращательные и поступательные, применяются к кончику корзинки, нажатие на мультикнопочном устройстве кнопки “6” дает команду на раскрытие корзинки, кнопки “7” - на захват камня, когда он внутри корзинки, для его дальнейшего извлечения.
В частном случае осуществления изобретения мультикнопочное устройство представляет собой запрограммированный контроллер, содержащий кнопки «↓», «↑» и кнопки, соответствующие цифрам от “0” до “9”.
В частном случае осуществления изобретения мультикнопочное устройство представляет собой компьютерную клавиатуру.
Возможность загрузки 3D моделей полостной системы почки конкретного пациента, а также модели камней, основанных на данных томографических исследований, позволяют осуществлять обучение навыкам манипулирования гибким уретероскопом на виртуальных 3D моделях, полученных в результате томографического обследования реальных пациентов, что обеспечивает возможность планирования операции. Кроме того, такой способ обучения позволяет осваивать начинающим хирургам навыки манипуляций при проведении интраренальной литотрипсии и экстракции камней из полостной системы почки без непосредственного влияния на пациента. Несмотря на то, что физические тренажеры обеспечивают тактильную обратную связь, эффект на освоение навыков аналогичен таковому при использовании предлагаемого способа, при этом использование реконструированные 3D модели органов пациентов позволяет в процессе обучения применять различные по анатомии виртуальные модели, загруженные в память ПК, и вызываемые из программы, без необходимости их производства, а использование контроллера с блоком датчиков обеспечивает независимость процесса обучения от использования эндоурологических инструментов, подверженных поломке на начальных этапах освоения специалистами тех или иных манипуляций. В совокупности использование контроллера и мультикнопочного устройства с установленной связью манипуляций, производимых с ними, и командами, передаваемыми ПК на изменение изображений 3D моделей органов, камней, отображение кончиков инструментов и их изменение позволяет отработать четкую последовательность действий, совершаемых во время реальных операций для проведения безошибочных манипуляций с настоящими пациентами.
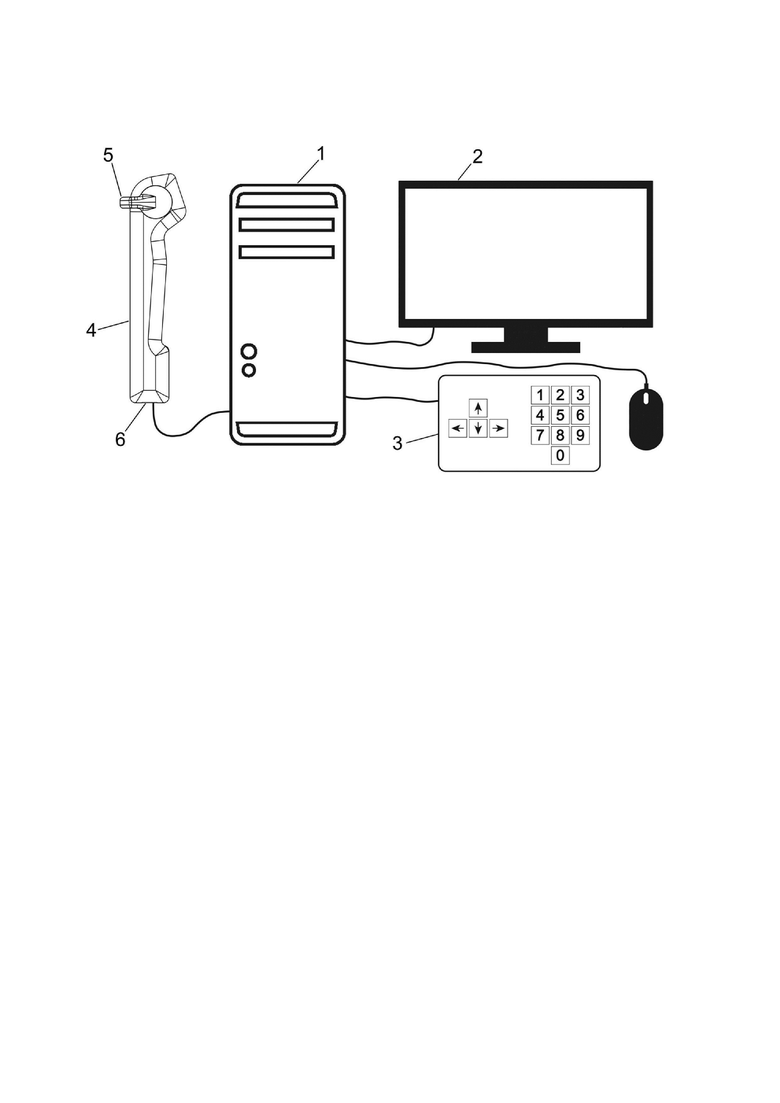
Далее решение поясняется ссылками на фигуру, на которой приведен общий вид системы, используемой в способе.
Заявленный способ реализуется посредством машиночитаемого носителя с записанными инструкциями, выполняемыми устройством обработки команд системы 1, выполнение которых визуально отображается на средстве вывода информации 2 в графической оболочке программы, загруженной в систему.
Под системой подразумевается компьютерная система, ЭВМ (электронно-вычислительная машина), ЧПУ (числовое программное управление), ПЛК (программируемый логический контроллер), компьютеризированные системы управления и любые другие устройства, способные выполнять заданную, четко определенную последовательность операций (действий, инструкций).
Под устройством обработки команд подразумевается электронный блок либо интегральная схема (микропроцессор), исполняющая машинные инструкции (программы).
Устройство обработки команд считывает и выполняет машинные инструкции (программы) с одного или более машиночитаемого носителя. В роли устройства хранения данных могут выступать, но, не ограничиваясь, жесткие диски (HDD), флеш-память, ПЗУ (постоянное запоминающее устройство), твердотельные накопители (SSD), оптические накопители информации (CD, DVD, Blue-Ray диски).
Программа - последовательность инструкций, предназначенных для исполнения устройством управления вычислительной машины или устройством обработки команд.
Команды на устройство обработки передаются с мультикнопочного устройства 3, а также с контроллера 4 для виртуальной симуляции ретроградной интраренальной хирургии, содержащего корпус, выполненного удлиненной формы с продольным углублением в центральной части с образованием выступов на обоих концах корпуса и включающий средство 6 для подключения контроллера к компьютеру, на боковой поверхности одного из выступов установлен жесткий рычаг 5, включающий поворотную часть, которая в нерабочем положении расположена перпендикулярно продольной оси корпуса и повернута в сторону, противоположную выступу, и внутреннюю часть, обращенную во внутреннюю область корпуса, внутренняя часть рычага и внутренняя поверхность корпуса содержат отверстия, к которым крепится с двух сторон пружина, внутри корпуса установлен модуль управления, включающий микроконтроллер, соединенный с акселерометром, выполненным с возможностью измерения угла поворота инструмента вокруг продольной оси, и магнитным энкодером, напротив которого на внутренней части рычага установлен неодимовый магнит.
Мультикнопочное устройство представляет собой запрограммированный контроллер, содержащий кнопки «↓», «↑» и кнопки, соответствующие цифрам от “0” до “9”. Также может использоваться стандартная компьютерная клавиатура
Ретроградная интраренальная хирургия (РИРХ) - это самый современный малоинвазивный оперативный метод лечения камней почек, применяемый при камнях почек до 2 см. Технический прогресс, разработка более миниатюрных гибких инструментов, а также бурное развитие лазерных технологий в последние годы послужили основой для внедрения новых методов удаления камней. Операция выполняется путем проведения тонкого гибкого инструмента (уретерореноскоп) через естественные мочевые пути и дробления камней при помощи лазерного излучения. Применение современного гибкого эндоскопического инструментария, а также различных устройств для разрушения и удаления фрагментов камня позволило в течение 1-1,5 часов удалять даже весьма плотные камни почек, в том числе расположенные в различных чашечках.
Компьютерная томография - метод неразрушающего послойного исследования внутреннего строения предмета. Метод основан на измерении и сложной компьютерной обработке разности ослабления рентгеновского излучения различными по плотности тканями. В настоящее время рентгеновская компьютерная томография является основным томографическим методом исследования внутренних органов человека с использованием рентгеновского излучения.
Воксел (в разговорной речи воксель, англ. Voxel - образовано из слов: объемный (англ. volumetric) и пиксель (англ. pixel)) - элемент объемного изображения, содержащий значение элемента растра в трехмерном пространстве. Вокселы являются аналогами двумерных пикселей для трехмерного пространства. Воксельные модели часто используются для визуализации и анализа медицинской и научной информации.
Данное техническое решение обеспечивает возможность планирования и репетиции ретроградной интраренальной хирургической операции за счет создания трехмерной модели полостной системы почки и камня конкретного пациента.
Согласно предлагаемому техническому решению, способ предоперационного моделирования хирургической процедуры включает следующие шаги.
Получают данные, содержащие информацию об исследовании пациента. Подробную информацию о пациенте можно получить из данных исследования, например, компьютерной томографии (КТ), магнитно-резонансной томографии (МРТ) и др.
Современные томографы сохраняют данные об исследовании пациента в специальном формате DICOM. DICOM-файл содержит информацию об интенсивности или плотности тканей в конкретном срезе, в каждой точке среза. Срезы могут производиться в трех плоскостях: сагиттальной, фронтальной, горизонтальной. DICOM файлы объединяются в серию и представляют набор последовательных срезов органа или участка тела. Назовем данные в серии, все точки (вокселы) каждого среза в серии, массив данных исследования, который представляет собой 3х мерный массив, где каждый элемент массива хранит координаты точки и плотность ткани. Загрузка, обработка, использование информации хранящейся в DICOM-файлах не представляет технической сложности исходя их текущего уровня техники.
Компьютерная томография сохраняет в файлах рентгеновскую плотность, которая зависит от физической плотности тканей. Для количественной оценки рентгеновской плотности используется шкала Хаунсфилда, диапазон плотностей тканей составляет -1024 до+3071 HU. Средние показатели по шкале Хаунсфилда: воздух -1000 HU, жир -120 HU, вода 0 HU, мягкие ткани+40 HU, кости+400 HU и выше.
Выделяют и определяют из этих данных путем фильтрации массива данных исследования в диапазоне плотностей, соответствующих содержимому полостной системы почки, на основании полученных данных создают 3D модель полостной системы почки и сохраняют в формате для аддитивных технологий, а именно, в формате стереолитографии (STL). Аналогично, выделяют и определяют путем фильтрации массива данных КТ-исследования в диапазоне плотностей, соответствующих камню полостной системы почки и сохраняют в формате STL.
Полученные STL-файлы, содержащие 3D модели полостной системы почки и камня, загружают в машиночитаемый носитель, которые после запуска программы в системе 1 можно визуализировать на средстве вывода информации 2 в графической оболочке программы. После загрузки модели полостной системы почки и модели камня, их позиционируют относительно друг другу в соответствии с реальным положением, определенным по КТ-снимкам.
Далее посредством мультикнопочного устройства 3 и контроллера 4 изменяют отображение участка, имитируя перемещение виртуального зонда гибкого уретероскопа внутри 3D модели начиная с верхней трети мочеточника.
Имитацию круговых и вращательных движений виртуального зонда осуществляют посредством контроллера, подключенного к ПК и включающего рукоять с рычагом и блоком датчиков, один из которых регистрирует угол поворота рукояти вокруг продольной оси, а другой регистрирует угол поворота рычага, передают полученные данные в микроконтроллер, который преобразует их в величину угла, на который необходимо отклонить виртуальный зонд в графическом интерфейсе ПО, и далее передаются на ПК. Отклонение сдвигаемого рычага 5 вверх до 90(соответствует отклонению изображения с виртуального зонда внутри 3D модели полостной системы почки в графическом интерфейсе ПО на ПК вниз до -270°, а отклонение сдвигаемого рычага вниз до -90(соответствует отклонению изображения вверх до 270°. Отклонение сдвигаемого рычага определяют посредством магнитного энкодера, установленного напротив поворотной части рычага, на которой закреплен неодимовый магнит.
Вращение рукояти влево до -180(соответствует вращению изображения влево до -180°, а вращение рукояти вправо до 180(соответствует вращению изображения вправо до 180°. Угол поворота рукояти вокруг своей продольной оси определяют посредством датчика, представляющего собой акселерометр, установленный на модуле управления.
Имитацию поступательных движений осуществляют посредством кнопок многокнопочного устройства 3, в частности имитацию перемещения виртуального зонда вперед-назад осуществляют с помощью кнопок «↓» и «↑» на мультикнопочном устройстве.
Также с помощью мультикнопочного устройства осуществляют передачу команды ПК на имитацию лазерной литотрипсии.
Так, с нажатием кнопки “1” на мультикнопочном устройстве на ПК передается команда на отображение в графической оболочке программы кончика лазера, после чего все предыдущие команды от контроллера и мультикнопочного устройства на перемещение, включая круговые, вращательные и поступательные, применяются к кончику лазера, нажатие на мультикнопочном устройстве кнопки “2” дает команду на включение или выключение лазера для дробления, нажатие кнопки “3” на мультикнопочном устройстве дает команду на выбор режима дробления - фрагментация/распыление, нажатие кнопки “4” - на активирование дробления.
Также с помощью мультикнопочного устройства осуществляют передачу команды ПК на имитацию удаления камней виртуальной корзинкой. Для этого с нажатием кнопки “5” на мультикнопочном устройстве на ПК передается команда на отображение в графической оболочке программы кончика корзинки, после чего все предыдущие команды от контроллера и мультикнопочного устройства на перемещение, включая круговые, вращательные и поступательные, применяются к кончику корзинки, нажатие на мультикнопочном устройстве кнопки “6” дает команду на раскрытие корзинки, кнопки “7” - на захват камня, когда он внутри корзинки, для его дальнейшего извлечения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ чрескожной нефролитотрипсии без применения рентгеновского излучения | 2024 |
|
RU2832584C1 |
| Способ лазерной ретроградной интраренальной литотрипсии | 2022 |
|
RU2781345C1 |
| Способ эндоскопического лечения больных нефролитиазом с применением альфа-адреноблокаторов | 2021 |
|
RU2779496C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО МАЛОИНВАЗИВНОГО ЛЕЧЕНИЯ НЕФРОЛИТИАЗА У ВЗРОСЛЫХ | 2018 |
|
RU2689853C2 |
| СПОСОБ ЛЕЧЕНИЯ БОЛЬНЫХ НЕФРОЛИТИАЗОМ С ПЛОТНЫМИ КАМНЯМИ | 2018 |
|
RU2687593C1 |
| Способ чрескожного пункционного доступа в полостную систему почки при перкутанной нефролитолапаксии | 2021 |
|
RU2755226C1 |
| ТРЕНАЖЕР ОПЕРАТИВНОГО И ЭКСПЛУАТАЦИОННОГО ПЕРСОНАЛА НА ОСНОВЕ МОДЕЛЕЙ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ ТРАНСФОРМАТОРНОЙ ПОДСТАНЦИИ | 2016 |
|
RU2617972C1 |
| Тренажер для отработки навыков ретроградной интраренальной хирургии | 2024 |
|
RU2830062C1 |
| СПОСОБ ПРОФИЛАКТИКИ МИГРАЦИИ КОНКРЕМЕНТА В ПОЧКУ ПРИ КОНТАКТНОЙ УРЕТЕРОЛИТОТРИПСИИ | 2013 |
|
RU2526269C1 |
| Способ ирригации при эндоскопических вмешательствах, основанный на непрерывной системе с использованием манжеты регулируемого давления | 2023 |
|
RU2819735C1 |
Изобретение относится к области медицины и предназначено для планирования и обучения ретроградной интраренальной хирургической операции по удалению камней почек с лазерной литотрипсией с использованием виртуальной симуляции. Предложен способ, характеризующийся тем, что получают данные, содержащие информацию об исследовании пациента с применением 3D визуализации, выделяют и определяют из этих данных путем фильтрации массива данных исследования в диапазоне плотностей, соответствующих содержимому полостной системы почки и камня, на основании полученных данных создают 3D модель полостной системы почки пациента и 3D модель камня и сохраняют их в памяти устройства или облачном хранилище в формате, применимом для хранения трехмерных моделей объектов, передают и используют созданную на предыдущем шаге трехмерную модель полостной системы почки и камня пациента для последующего моделирования тренировочной хирургической операции, включающей запуск программы на ПК с графической оболочкой, в которую загружают файл с полостной 3D моделью почки и файл с 3D моделью камня, изменяют отображение участка, имитируя перемещение виртуального гибкого уретероскопа внутри 3D модели, начиная с верхней трети мочеточника, при этом имитацию круговых и вращательных движений виртуального зонда гибкого уретероскопа осуществляют посредством контроллера, подключенного к ПК и включающего рукоять с рычагом и блоком датчиков, один из которых регистрирует угол поворота рукояти вокруг продольной оси, а другой регистрирует угол поворота рычага, передают полученные данные в микроконтроллер, который преобразует их в величину угла, на который необходимо отклонить виртуальный зонд в графическом интерфейсе ПО, и далее передаю на ПК, а имитацию поступательных движений осуществляют посредством кнопок многокнопочного устройства, с помощью которого также осуществляют передачу команды ПК на имитацию лазерной литотрипсии и удаления камней виртуальной корзинкой. Изобретение обеспечивает способ отработки мануальных навыков начинающих хирургов, а также опытных хирургов при планировании операций с использованием гибкого уретероскопа, без необходимости использования физических моделей за счет возможности использования устройства с виртуальными моделями посредством модуля датчиков положения, регистрирующего величины изменения положения подвижных единиц устройства, и связанного с ним модуля управления, передающего данные от датчиков на ПК. 9 з.п. ф-лы, 1 ил.
1. Способ планирования и обучения ретроградной интраренальной хирургической операции по удалению камней почек с лазерной литотрипсией с использованием виртуальной симуляции, характеризующийся тем, что получают данные, содержащие информацию об исследовании пациента с применением 3D визуализации, выделяют и определяют из этих данных путем фильтрации массива данных исследования в диапазоне плотностей, соответствующих содержимому полостной системы почки и камня, на основании полученных данных создают виртуальную 3D модель полостной системы почки пациента и виртуальную 3D модель камня и сохраняют их в памяти устройства или облачном хранилище в формате, применимом для хранения трехмерных моделей объектов, передают и используют созданную на предыдущем шаге трехмерную модель полостной системы почки и камня пациента для последующего моделирования тренировочной хирургической операции, включающей запуск программы на ПК с графической оболочкой, в которую загружают файл с полостной виртуальной 3D моделью почки и файл с виртуальной 3D моделью камня, изменяют отображение участка, имитируя перемещение виртуального гибкого уретероскопа внутри виртуальной 3D модели, начиная с верхней трети мочеточника, при этом имитацию круговых и вращательных движений виртуального зонда гибкого уретероскопа осуществляют посредством контроллера, подключенного к ПК и включающего рукоять, рычаг и блок датчиков, один из которых регистрирует угол поворота рукояти вокруг продольной оси, а другой регистрирует угол поворота рычага, передают полученные данные в микроконтроллер, который преобразует их в величину угла, на который необходимо отклонить виртуальный зонд в графическом интерфейсе ПО, и далее передают на ПК, а имитацию поступательных движений осуществляют посредством кнопок многокнопочного устройства, с помощью которого также осуществляют передачу команды ПК на имитацию лазерной литотрипсии и удаления камней виртуальной корзинкой.
2. Способ виртуальной симуляции ретроградной интраренальной хирургии для лечения мочекаменной болезни по п.1, отличающийся тем, что отклонение сдвигаемого рычага вверх до 90° соответствует отклонению изображения с виртуального зонда внутри 3D модели полостной системы почки в графическом интерфейсе ПО на ПК вниз до -270°, а отклонение сдвигаемого рычага вниз до -90° соответствует отклонению изображения вверх до 270°.
3. Способ виртуальной симуляции ретроградной интраренальной хирургии для лечения мочекаменной болезни по п.1, отличающийся тем, что отклонение сдвигаемого рычага определяют посредством магнитного энкодера, установленного напротив поворотной части рычага, на которой закреплен неодимовый магнит.
4. Способ виртуальной симуляции ретроградной интраренальной хирургии для лечения мочекаменной болезни по п.1, отличающийся тем, что вращение рукояти влево до -180° соответствует вращению изображения влево до -180°, а вращение рукояти вправо до 180° соответствует вращению изображения вправо до 180°.
5. Способ виртуальной симуляции ретроградной интраренальной хирургии для лечения мочекаменной болезни по п.1, отличающийся тем, что угол поворота рукояти вокруг своей продольной оси определяют посредством датчика, представляющего собой акселерометр, установленный на модуле управления.
6. Способ виртуальной симуляции ретроградной интраренальной хирургии для лечения мочекаменной болезни по п.1, отличающийся тем, что имитацию перемещения виртуального зонда вперед-назад осуществляют с помощью кнопок «↓» и «↑» на мультикнопочном устройстве.
7. Способ виртуальной симуляции ретроградной интраренальной хирургии для лечения мочекаменной болезни по п.1, отличающийся тем, что с нажатием кнопки “1” на мультикнопочном устройстве на ПК передается команда на отображение в графической оболочке программы кончика лазера, после чего все предыдущие команды от контроллера и мультикнопочного устройства на перемещение, включая круговые, вращательные и поступательные, применяются к кончику лазера, нажатие на мультикнопочном устройстве кнопки “2” дает команду на включение или выключение лазера для дробления, нажатие кнопки “3” на мультикнопочном устройстве дает команду на выбор режима дробления - фрагментация/распыление, нажатие кнопки “4” - на активирование дробления.
8. Способ виртуальной симуляции ретроградной интраренальной хирургии для лечения мочекаменной болезни по п.1, отличающийся тем, что с нажатием кнопки “5” на мультикнопочном устройстве на ПК передается команда на отображение в графической оболочке программы кончика виртуальной эндоурологической корзинки, после чего все предыдущие команды от контроллера и мультикнопочного устройства на перемещение, включая круговые, вращательные и поступательные, применяются к кончику корзинки, нажатие на мультикнопочном устройстве кнопки “6” дает команду на раскрытие корзинки, кнопки “7” - на захват камня, когда он внутри корзинки, для его дальнейшего извлечения.
9. Способ виртуальной симуляции ретроградной интраренальной хирургии для лечения мочекаменной болезни по п.1, отличающийся тем, что мультикнопочное устройство представляет собой запрограммированный контроллер, содержащий кнопки «↓», «↑» и кнопки, соответствующие цифрам от “0” до “9”.
10. Способ виртуальной симуляции ретроградной интраренальной хирургии для лечения мочекаменной болезни по п.1, отличающийся тем, что мультикнопочное устройство представляет собой компьютерную клавиатуру.
| US 2004076940 A1, 22.04.2004 | |||
| US 2019361589 A1, 28.11.2019 | |||
| US 8500451 B2, 06.08.2013 | |||
| US 10716626 B2, 21.07.2020. |
