Изобретение относится к медицинской технике, а именно к хирургическим системам стереовидения для проведения нейрохирургических операций, в частности, в нейрохирургии.
Известно, что на смену стандартному оборудованию, используемому в хирургии (бинокулярным микроскопам) пришли стереосистемы, позволяющие преобразовывать оптическое изображение от операционного поля в цифровое.
Стандартное оборудование для увеличения можно описать схематично так: оператор смотрит через оптический блок на операционное поле, при этом оператор не контролирует ситуацию вне операционного поля, а соответственно отсутствует возможность использования дополнительного оборудования без вспомогательного персонала. При этом оптический блок является оборудованием приема и вывода информации, что увеличивает его габариты и уменьшает полезный объем над операционным полем, дополнительные отводы изображения снижают светочувствительность, а также создают трудности при командной работе и обучении.
В схеме с цифровой стереосистемой оператор использует средства вывода, которые не «закрывают» остальное пространство от оператора и при этом оптический блок является только средством приема информации и поэтому появляется возможность установки его в любой точке, которая не мешает проведению операционных действий. Средством вывода может являться монитор и различные гарнитуры (VR гарнитура, AR гарнитура).
Также преимуществом стереосистем является возможность отображения информации, которую не воспринимает человеческий глаз (информация с тепловизионной и инфракрасной камеры, данных с ультразвукового приемника и т.д.), а также обработка полученной информации (наложение разнородных изображений, яркостная и цветовая коррекция, обнаружение и распознавание объектов в операционном поле).
Из существующего уровня техники известна операционная система (микроскоп) для нейрохирургии ZEISS KINEVO 900 (https://zeiss-solutions.ru/press/news/zeiss-kinevo-900-polucheno-registratsionnoe-udostoverenie/), сочетающая в себе оптические и цифровые методы визуализации. Она дает хирургу возможность наблюдать в окулярах или на мониторе изображения субмиллиметровых размеров с четкой детализацией. Также система оснащена роботизированной системой управления, которая обеспечивает точное позиционирование и помогает сократить число манипуляций, выполняемых хирургом вручную.
Известен цифровой хирургический микроскоп AESCULAP AEOS (https://www.bbraun.ru/ru/products-and-therapies/neurosurgery/aeos.htm который обеспечивает более эффективный рабочий процесс благодаря роботизированным функциям и высокому качеству изображения.
Основным минусом данных систем является то, что оптический блок - приемник находится в зоне видимости оператора, то есть закрывает или рабочую область, или средство вывода.
Наиболее близкой по существенным признакам к заявляемому устройству является хирургическая система стереовидения (Патент RU №2757645, 19.10.2021).
Данная система включает монитор, оптический модуль с двумя каналами получения изображения, монитор и оптический модуль установлены на напольной конструкции -штативе; оптический модуль снабжен устройством электронного управления моторизированным перемещением с помощью двигателей по осям OX, OY, OZ с фиксированным расстоянием 600±10 мм до операционного поля. Преимущества:
Фиксированное расстояние в 600 мм от оптического модуля до операционного поля значительно улучшает эргономичность рабочего места, давая больше свободы рукам хирурга. Также такое расположение позволяет получить большую глубину резкости, недостижимую в традиционных микроскопах.
Монитор, регулируемый по высоте и наклону, закреплен на стойке штатива на уровне глаз хирурга. Выдержанное расстояние от глаз хирурга до экрана монитора обеспечивает улучшенную 3D визуализацию, а также позволяет достичь преимуществ в эргономике, удобства в работе и пониженной утомляемости хирурга.
Недостатком данной системы является недостаточность степеней свободы для проведения нейрохирургических операционных вмешательств, т.е. оптический блок не имеет наклонов для визуализации оперируемой области, которая находится не перпендикулярно оптическому модулю.
Задачей предлагаемого устройства является создание хирургической системы стереовидения, свободной от указанных недостатков.
Техническим результатом предлагаемого изобретения является улучшение эргономических и технико-эксплуатационных характеристик.
Технический результат достигается за счет того, что в предлагаемом устройстве, содержащем монитор, оптический модуль с каналами получения изображения, устройство электронного управления моторизированным перемещением оптического модуля по осям ОХ, OY, OZ и штатив; монитор располагается вблизи операционного стола на подкатной стойке, оптический модуль снабжен 2 дополнительными каналами получения изображения, каждый из которых оснащен индивидуальным модулем подсветки и размещен за головой оператора, штатив выполнен в форме двух разновеликих перекрещивающихся дуговых платформ, снабженных дополнительными электромоторами для обеспечения возможности поворотов оптического модуля относительно осей OX, OY.
Существенность конструктивных отличий предлагаемой системы для достижения заявленного технического результата обоснована следующим:
Специфика нейрохирургических операций отличается тем, что не только расстояние от оптического модуля до операционного поля может значительно меняться, но и угол, под которым необходимо направлять камеры, что требует дополнительных технических усовершенствований устройства.
По сравнению с прототипом в предлагаемом устройстве увеличено количество каналов получения изображения. Для передачи стереоизображения их должно быть минимум два, но в предлагаемом устройстве предусмотрено их увеличение до четырех: два оптических канала - для формирования стереоизображения и дополнительные каналы - для расширения принимаемых диапазонов (ультрафиолетовый, инфракрасный, тепловой, ультразвук и т.д.).
Каждый канал оснащен индивидуальным модулем подсветки, т.к. для каждого типа приемника необходим свой тип подсветки. Также предусмотрено управление увеличением и фокусировкой каждого из каналов для оперативной подстройки изображения.
Оптический модуль установлен на штатив, который имеет две дуговые платформы для перемещения и поворота вокруг оси. Это позволяет быстро менять ракурс обзора при сохранении фокусного расстояния до объекта, что позволяет оперативно изменять положение оптического блока при перекрытии обзора препятствием (оборудованием или оператором). Перемещение оптического модуля по 5 степеням свободы (оси OX, OY, OZ и повороты относительно осей OX, OY) осуществляется с помощью электромоторов, расположенных на штативе и оптическом блоке. Расположение оптического модуля вне рабочей зоны оператора, а именно за его головой, позволяет достичь преимуществ в эргономике, удобства в работе и пониженной утомляемости оператора.
Монитор, регулируемый по высоте и наклону, закреплен на подкатной стойке и расположен на уровне глаз оператора Такое расположение монитора обеспечивает улучшенную 3D визуализацию, а также позволяет достичь преимуществ в эргономике, удобства в работе и пониженной утомляемости оператора (Фиг. 1).
Управление микроскопом осуществляется с помощью беспроводного пульта управления, педали и тактильной панели, а именно: управление фокусировкой, сведением оптических осей, увеличением, подсветкой, а также режимами отображения. Средством вывода данной системы является монитор с возможностью стереовывода, гарнитуры дополненной и виртуальной реальности.
На Фиг. 2. представлена структурно - функциональная схема предлагаемой хирургической системы стереовидения, со следующими обозначениями:
1 - штатив, снабженный средством управления системой, позволяющей изменять положение оптического модуля по 5 координатам, настраивать изображение, изменяя настройки освещения, увеличения, цветокоррекции, а также переводить устройства в различные предустановленные режимы;
2 - дугообразные платформы;
3 - оптический модуль;
4 - монитор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Хирургическая система стереовидения | 2021 |
|
RU2757645C1 |
| Система визуализации операционного поля для проведения нейрохирургических операций | 2024 |
|
RU2835618C1 |
| ЦИФРОВОЙ СТЕРЕОМИКРОСКОП | 2018 |
|
RU2687800C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ЛИНЕЙЧАТЫХ СТРУКТУР | 2016 |
|
RU2629735C1 |
| УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ ИНТЕРФЕЙСА С ОБЪЕКТОМ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2011 |
|
RU2486608C2 |
| УСТРОЙСТВО ДЛЯ ФЛУОРЕСЦЕНТНОЙ НАВИГАЦИИ В НЕЙРОХИРУРГИИ | 2017 |
|
RU2661029C1 |
| СПОСОБ ИНТРАОПЕРАЦИОННОГО ВЫЯВЛЕНИЯ НАЛИЧИЯ И ЛОКАЛИЗАЦИИ ГЛИАЛЬНЫХ НОВООБРАЗОВАНИЙ ГОЛОВНОГО МОЗГА | 2014 |
|
RU2561030C1 |
| Способ коррекции роговичного астигматизма посредством лимбальных послабляющих разрезов при факоэмульсификации и имплантации асферических ИОЛ с использованием системы VERION-LenSx | 2017 |
|
RU2665460C1 |
| Способ использования оптической медицинской навигационной системы для визуализации и количественной оценки качества репозиции отломков при переломе кости таза | 2016 |
|
RU2635451C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМ ОПЕРАЦИОННЫМ ЭКЗОСКОПОМ | 2020 |
|
RU2757991C2 |

Изобретение относится к медицинской технике, а именно к хирургическим системам стереовидения для проведения микрохирургических операций, в частности в нейрохирургии. Заявленная хирургическая система стереовидения содержит монитор, оптический модуль с каналами получения изображения, устройство электронного управления моторизированным перемещением оптического модуля по осям OX, OY, OZ и штатив. Монитор располагается вблизи операционного стола на подкатной стойке, оптический модуль снабжен 2 дополнительными каналами получения изображения, каждый из которых оснащен индивидуальным модулем подсветки и размещен за головой оператора, штатив выполнен в форме двух разновеликих перекрещивающихся дуговых платформ, снабженных дополнительными электромоторами для обеспечения возможности поворотов оптического модуля относительно осей OX, OY. Технический результат заключается в улучшении эргономических и технико-эксплуатационных характеристик. 2 ил.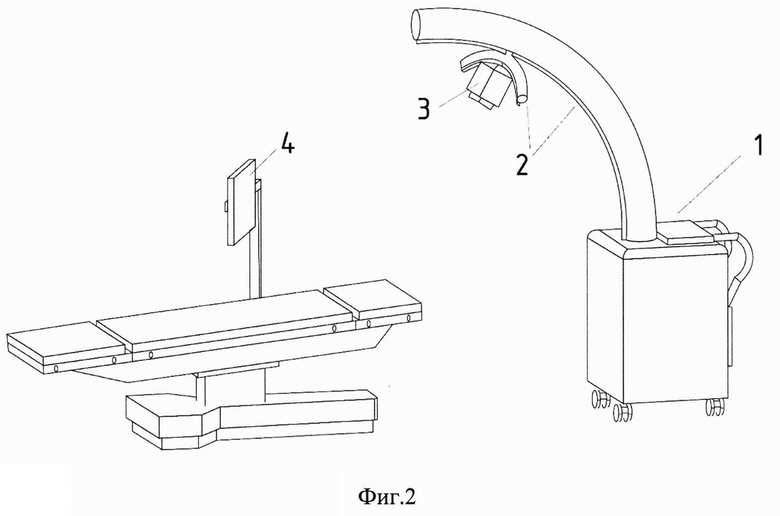
Хирургическая система стереовидения, содержащая монитор, оптический модуль с каналами получения изображения, устройство электронного управления моторизированным перемещением оптического модуля по осям OX, OY, OZ и штатив, отличающаяся тем, что монитор располагается вблизи операционного стола на подкатной стойке, оптический модуль снабжен 2 дополнительными каналами получения изображения, каждый из которых оснащен индивидуальным модулем подсветки и размещен за головой оператора, штатив выполнен в форме двух разновеликих перекрещивающихся дуговых платформ, снабженных дополнительными электромоторами для обеспечения возможности поворотов оптического модуля относительно осей OX, OY.
| Хирургическая система стереовидения | 2021 |
|
RU2757645C1 |
| EP 3879328 A1, 15.09.2021 | |||
| US 11147443 B2, 19.10.2021 | |||
| US 20210169606 A1, 10.06.2021 | |||
| US 10028651 B2, 24.07.2018 | |||
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
