Способ использования оптической медицинской навигационной системы для визуализации и количественной оценки качества репозиции отломков при переломе кости таза относится к способам планирования и контроля выполнения хирургических операций и может быть использован при проведении хирургических операций в травматологии для обеспечения количественного контроля и визуализации в режиме реального времени совмещения отломков кости таза и движения хирургических инструментов в операционном поле на основе 3D рентгеновских компьютерных томографических изображений, полученных при предварительных обследованиях пациента.
Известен способ: «Three - Dimensional Fluoroscopy - Navigated Percutaneous Screw Fixation of Acetabular» Fractures. // Philipp Schwabe, Burak Altintas, Klaus-Dieter Schaser, Claudia Druschel, Christian Kleber, Norbert P. Haas, Sven Maerdian. Journal of Orthopaedic Trauma, 2014, - Volume 28, - Number 12, - p. 700-706.
Этот способ включает контроль во время операции положения неподвижной части кости таза, подвижной части кости таза и области перелома по 3D рентгеновскому изображению, установку референтного позиционера с пассивными маркерами на неподвижной части кости таза, определение по 3D рентгеновскому изображению, через какие области неподвижной части кости таза и подвижной части кости таза во время операции будет осуществляться фиксация подвижной части кости таза к неподвижной части кости таза винтом, установку первого позиционера с пассивными маркерами на направляющую спицы, контроль направления спицы с помощью оптической медицинской навигационной системы по схематическому изображению на экране монитора первого позиционера с пассивными маркерами, установленного на направляющей спицы, засверливание дрелью спицы в неподвижную часть кости таза и подвижную часть кости таза. Контроль глубины засверливания спицы осуществляется по постоянно регистрируемому 3D рентгеновскому изображению конца спицы относительно неподвижной части кости таза и подвижной части кости таза. После засверливания спицы проводят удаление направляющей спицы, установку скрепляющего подвижную часть кости таза и неподвижную часть кости таза винта, удаление спицы и зашивание раны. Этот способ выбран в качестве прототипа предложенного решения.
Недостаток этого способа заключается в том, что во время операции многократно используется регистрация 3D рентгеновского изображения области перелома кости таза, отломков и хирургических инструментов. В результате этого происходит многократное рентгеновское облучение пациента и медицинского персонала, что является вредным и нежелательным. К тому же 3D рентгеновское изображение не является изображением высокого качества, контраста, четкости и разрешающей способности и не позволяет видеть мелкие детали костей. Кроме того, данный способ не дает количественной оценки сближения неподвижной и подвижной частей кости таза, а только визуализируемое на экране рентгеновского прибора расположение костей относительно друг друга. Это снижает функциональные возможности, безопасность и точность репозиции отломков известного способа.
Технический результат изобретения заключается в том, что во время операции получают количественную оценку, характеризующую точность совмещения неподвижной части кости таза и подвижной части кости таза в области перелома, что приводит к расширению функциональных возможностей предложенного способа за счет повышения точности репозиции неподвижной и подвижной частей кости таза. Предложенный способ позволяет значительно снизить лучевую нагрузку на пациента, так как пациент подвергается только предварительному обследованию на рентгеновском компьютерном томографе. Медицинский персонал во время выполнения операции вообще не подвергается рентгеновскому облучению.
Указанный технический результат достигается тем, что в способе использования оптической медицинской навигационной системы для визуализации и количественной оценки качества репозиции отломков при переломе кости таза используется обследование пациента на рентгеновском компьютерном томографе с установленными на неподвижной и подвижной частях кости таза пациента позиционеров с пассивными маркерами, построение 3D сегментированного изображения неподвижной части кости таза и подвижной части кости таза и установленных на них позиционерах с пассивными маркерами. Осуществляется пространственная геометрическая привязка изображений позиционеров, установленных на неподвижной части кости таза и подвижной части кости, а также направляющих спицы и засверливающей ее дрели, видимых стереовидеокамерами, и 3D сегментированных изображений, что обеспечивает слежение в реальном масштабе времени за геометрическим расстоянием между указанными хирургом в области перелома точками соответствия на неподвижной и подвижной частях кости таза, которые во время хирургической операции необходимо максимально сблизить, чтобы ликвидировать щель в области перелома
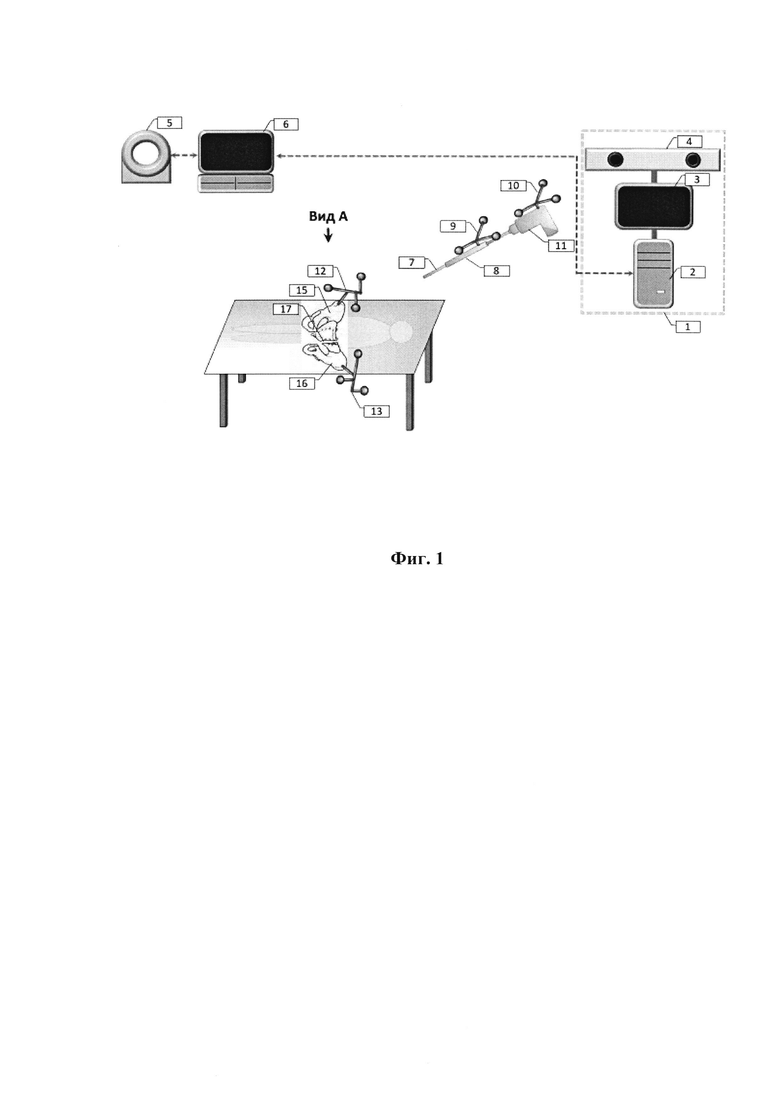
На фиг. 1 изображена схема приборного комплекса оптической медицинской навигационной системы для реализации предложенного способа.
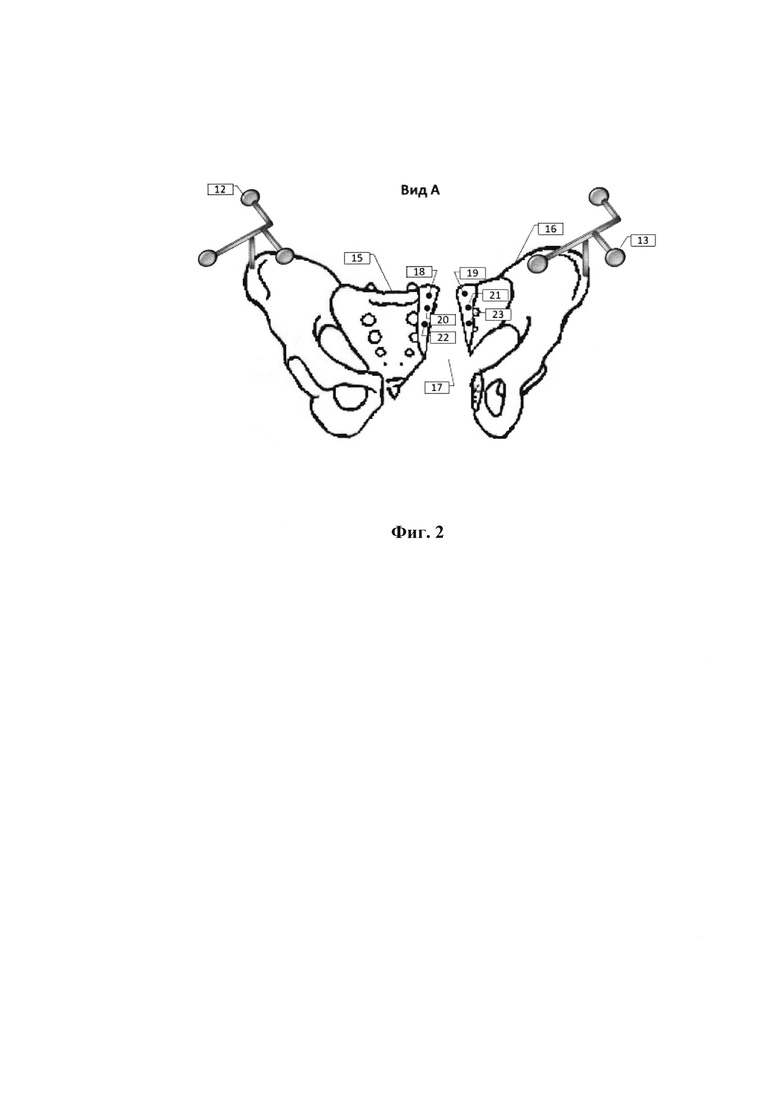
На фиг. 2 изображено 3D сегментированное изображение неподвижной и подвижной частей кости таза с установленными на них позиционерами с пассивными маркерами. В области перелома указаны точки соответствия.
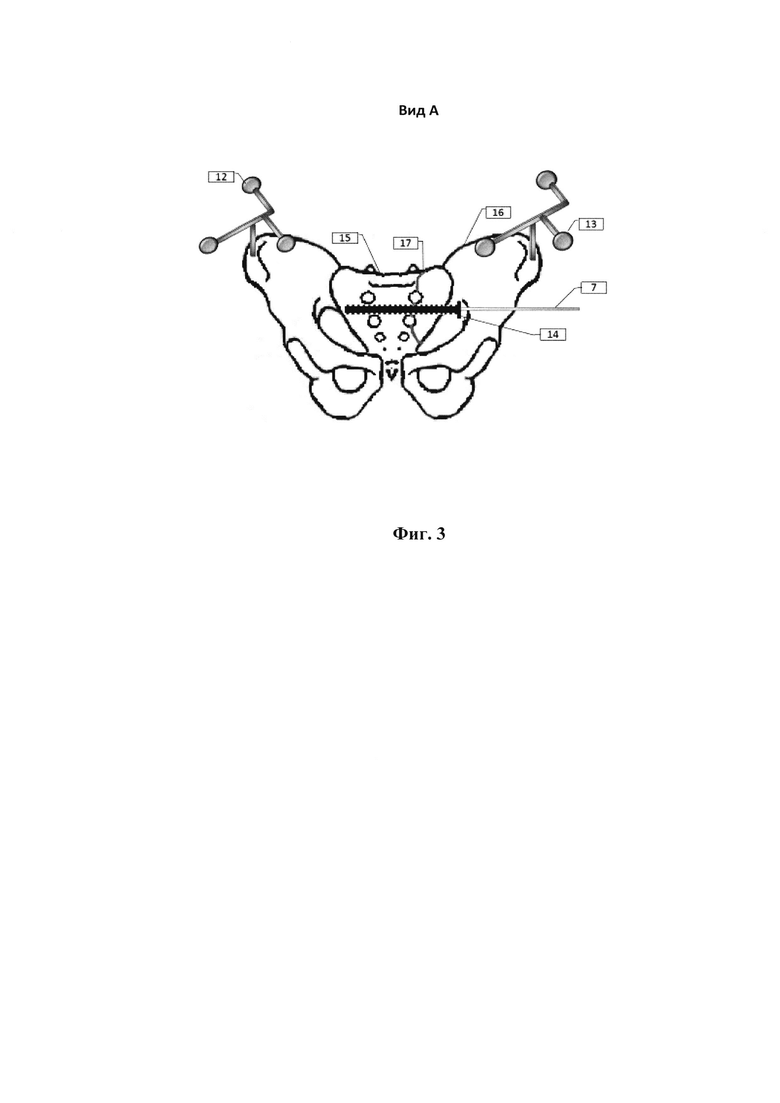
На фиг. 3 изображено 3D сегментированное изображение кости таза с позиционерами с пассивными маркерами после фиксации отломков винтом.
Приборный комплекс (оптическая медицинская навигационная система) для реализации предложенного способа включает оптическую медицинскую навигационную систему 1 (фиг. 1), содержащую компьютер 2, монитор 3 и стереовидеокамеры 4. Также в состав приборного комплекса входят первый позиционер с пассивными маркерами 9, устанавливаемый на направляющую спицы 7, второй позиционер с пассивными маркерами 10, устанавливаемый на дрель 11, референтный позиционер с пассивными маркерами 12 и третий позиционер с пассивными маркерами 13. Приборный комплекс использует зарегистрированные на рентгеновском компьютерном томографе 5 и обработанные на входящей в его состав рабочей станции 6 изображения.
Стереовидеокамеры 4 способны обеспечивать захват стереоизображения операционного поля на расстоянии 1,5 м и объемом не менее 1 м. Для увеличения контраста изображения пассивных маркеров и более качественного выделения пассивных маркеров на получаемом видеоизображении используется инфракрасная подсветка, выполненная светодиодами (не показаны), которые располагаются вокруг обоих объективов стереовидеокамер 4. Для уменьшения негативного влияния осветительных хирургических ламп диапазон пропускания видеокамер 4 установлен от 950 нм, максимальное разрешение видеокамер 2048⋅2048 пикселей. Для одномоментной регистрации изображений с двух видеокамер введена их синхронизация.
В качестве пассивных маркеров используют светоотражающие маркеры, имеющие форму шариков диаметром не менее 9 мм. Программное обеспечение оптической медицинской навигационной системы 1 работает на компьютере 2. Программное обеспечение выполняет геометрическую привязку координат, видимых стереовидеокамерами 4 на теле пациента референтного позиционера с пассивными маркерами 12, установленного на неподвижной части кости таза и третьего позиционера с пассивными маркерами 13, установленного на подвижную часть кости таза 16, с пространственными координатами сегментированных 3D изображений референтного позиционера с пассивными маркерами 12 и соответствующего ему сегментированного изображения неподвижной части кости таза 15 и третьего позиционера с пассивными маркерами 13 и соответствующего ему сегментированного изображения подвижной части кости таза 16. Также программное обеспечение оптической медицинской навигационной системы 1, работающее на компьютере 2, выполняет геометрическую привязку координат, видимых стереовидеокамерами 4, направляющей спицы 8 по установленному на ней первому позиционеру с пассивными маркерами 9 и координат дрели по установленному на ней второму позиционеру с пассивными маркерами 10, с пространственными координатами 3D сегментированного изображения неподвижной части кости таза 15 и подвижной части кости таза 16.
В качестве компьютера 2 может быть использован персональный компьютер с характеристиками не хуже: Intel Core i7-5960X 3.0GHz 8 Cores 20MB.
Ввод данных в приборный комплекс во время операции осуществляется с помощью сенсорного монитора 3 с размером диагонали не менее 60 см.
Предложенный способ реализуется следующим образом.
Хирург выполняет установку референтного позиционера с пассивными маркерами 12 (фиг. 1) на неподвижной части кости таза 15. На подвижной части кости таза 16 устанавливают третий позиционер с пассивными маркерами 13. Позиционеры устанавливают на соответствующие кости таза при местном обезболивании. Затем на рентгеновском компьютерном томографе 5 проводят регистрацию 3D изображения неподвижной части кости таза 15 с установленным на ней референтным позиционером с пассивными маркерами 12 и подвижной части кости таза 16 с установленным на ней третьим позиционером с пассивными маркерами 13. Далее на рабочей станции 6 рентгеновского компьютерного томографа 5 проводят обработку изображений и строят 3D сегментированное изображение (Фиг. 2) неподвижной части кости таза 15 с установленным на ней референтным позиционером с пассивными маркерами 12 и 3D сегментированное изображение подвижной части кости таза 16 с установленным на ней третьим позиционером с пассивными маркерами 13. Результаты обработки по вычислительной сети передаются в компьютер 2 оптической медицинской навигационной системы 1 и отображаются на экране монитора 3 хирургу для планирования операции по выбору направления и глубины засверливания спицы 7 и последующей установки по ней скрепляющего винта 14.
На 3D сегментированном изображении (Фиг. 2) неподвижной части 15 и подвижной части 16 кости таза хирургом в области перелома 17 указываются точки соответствия. Для этого на экране монитора 3 на 3D сегментированном изображении неподвижной части кости таза 15 хирург указывает точки 18, 20, 22 и т.д., на подвижной части кости таза 16 хирург указывает точки 19, 21, 23 и т.д. Для установки точек выбираются характерные анатомические ориентиры на костях в области перелома. Эти точки во время операции для устранения щели в области перелома 17 должны быть максимально совмещены друг с другом следующим образом: точка 18 с точкой 19, точка 20 с точкой 21, точка 22 с точкой 23 и т.д. Для достижения хорошей точности соответствия репозиции отломков достаточно использовать 6-7 пар точек.
Во время операции видеоизображение со стереовидеокамер 4 по USB-интерфейсу передается в компьютер 2, где подвергается математической обработке для вычисления пространственных координат референтного позиционера с пассивными маркерами 12 на неподвижной части кости таза, третьего позиционера с пассивными маркерами 13, первого позиционера с пассивными маркерами 9, установленного на направляющую спицы 8, и третьего позиционера с пассивными маркерами 10, установленного на дрель 11. Далее программное обеспечение оптической стереоскопической навигационной системы 1 производит геометрическую привязку пространственных координат референтного позиционера с пассивными маркерами 12 и третьего позиционера с пассивными маркерами 13, видимых на теле пациенте стереовидеокамерами 4 и схематически отображаемых на экране монитора 3 в процессе их движения в реальном масштабе времени с 3D сегментированными изображениями референтного позиционера с пассивными маркерами 12, соединенного в единое целое с неподвижной частью кости таза 15, и третьего позиционера с пассивными маркерами 13, соединенного в единое целое с подвижной частью кости таза 16.
Хирург во время операции старается сблизить неподвижную часть кости таза 15 и подвижную часть кости таза 16 в области перелома 17 и установить их в оптимальном положении для последующей фиксации винтом 14. При этом программное обеспечение, работающее на компьютере 3 оптической медицинской навигационной системы 1, обеспечивает слежение за перемещением неподвижной части кости таза 15 и подвижной части кости таза 16 как их 3D сегментированных изображений и отображает их перемещения относительно друг друга на экране монитора 3. Также на монитор 3 выводится дополнительная информация о расстояниях в миллиметрах между парами точек соответствия на неподвижной части кости таза 15 и подвижной части кости таза 16 (18-20, 20-22, 21-23 и т.д.), которые необходимо максимально сблизить для обеспечения совмещения неподвижной 15 и подвижной 16 частей таза в области перелома 17.
Далее хирург определяет, через какие области неподвижной части кости таза 15 и подвижной части кости таза 16 во время операции будет осуществляться их фиксация винтом 14.
Затем хирург выполняет установку первого позиционера с пассивными маркерами 9 на направляющую спицы 8 и устанавливает второй позиционер с пассивными маркерами 10 на дрель 11.
Во время операции стереовидеокамеры 4 системы оптической медицинской навигационной системы 1 регистрируют видеоизображение первого позиционера с пассивными маркерами 9 направляющей спицы 7 и второго позиционера с пассивными маркерами 10 дрели 11. Программное обеспечение, работающее на компьютере 3, обеспечивает перерасчет их пространственных координат в координаты 3D сегментированного изображения неподвижной 15 и подвижной 16 частей костей таза и обеспечивает схематическую визуализацию направления и глубины засверливания спицы 7 на мониторе 3.
Хирург задает направление засверливания спицы 7 по схематическому изображению на экране монитора 3 пассивных маркеров первого позиционера с пассивными маркерами 9, расположенного на направляющей спицы 8 относительно 3D сегментированного изображения неподвижной части кости таза 15 и подвижной части кости таза 16, отображаемых на экране монитора 3 оптической медицинской навигационной системы 1. Хирург начинает засверливание спицы 7, контролируя глубину засверливания, наблюдая на экране монитора 3 схематическое изображение конца спицы 7 по второму позиционеру с пассивными маркерами 10, установленного на дрели 11, относительно 3D изображения неподвижной части кости таза 15 и подвижной части кости таза 16. Затем хирург удаляет направляющую спицы 8 и по спице 7 устанавливает скрепляющий подвижную часть кости таза 16 и неподвижную часть кости таза 15 винт 14 (Фиг. 3), удаляет спицу 7 и проводит зашивание раны.
Применение в предложенном способе координируемых в пространстве видимых стереовидеокамерами 4 оптической медицинской навигационной системы 1 референтного позиционера 12, установленного на неподвижную часть кости таза 15, третьего позиционера с пассивными маркерами 13, установленного на подвижную часть кости таза 16, направляющей спицы 8 по установленному на нее позиционеру с пассивными маркерами 9 и дрели 11 по установленному на нее второму позиционеру с пассивными маркерами 10, с построенным 3D сегментированным изображением референтного позиционера 12 и третьего позиционера с пассивными маркерами 13, однозначно связанных с соответствующими неподвижной 15 и подвижной 16 частями костей таза, приводит к возможности контролировать в реальном масштабе времени по изображению на экране монитора 3 направление и глубину засверливания спицы 7, получать количественную оценку, характеризующую точность совмещения неподвижной части кости таза 15 и подвижной части кости таза 16 в области перелома 17, что обеспечивает расширение функциональных возможностей предложенного способа. Предложенный способ позволяет значительно снизить лучевую нагрузку на пациента, так как пациент подвергается только предварительному обследованию на рентгеновском компьютерном томографе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дистального блокирования интрамедуллярных блокируемых стержней | 2019 |
|
RU2749839C2 |
| Способ блокирования интрамедуллярного блокируемого стержня | 2022 |
|
RU2814371C2 |
| Способ подготовки и выполнения хирургической операции с использованием дополненной реальности и комплекс оборудования для её осуществления | 2019 |
|
RU2707369C1 |
| Способ восстановления полного разрыва дистального сухожилия двуглавой мышцы плеча | 2022 |
|
RU2785858C1 |
| АННОТАТОР СОСУДОВ | 2012 |
|
RU2595805C2 |
| СПОСОБ ЛЕЧЕНИЯ ПЕРЕЛОМОВ ТРУБЧАТОЙ КОСТИ У МЕЛКИХ ДОМАШНИХ ЖИВОТНЫХ | 2020 |
|
RU2760214C1 |
| СПОСОБ ВВЕДЕНИЯ ВИНТОВ В КРЕСТЕЦ | 2015 |
|
RU2584557C1 |
| Способ лечения перелома дна вертлужной впадины, осложненных центральным вывихом бедренной кости | 1989 |
|
SU1729497A1 |
| КОМПЛЕКТ ДЛЯ РЕПОЗИЦИИ И НАРУЖНОЙ ФИКСАЦИИ ОТЛОМКОВ КОСТЕЙ КОНЕЧНОСТЕЙ И/ИЛИ ТАЗА | 2015 |
|
RU2606269C2 |
| СПОСОБ МАЛОИНВАЗИВНОГО УДАЛЕНИЯ ИНОРОДНЫХ ТЕЛ ИЗ ВЕЩЕСТВА ГОЛОВНОГО МОЗГА С ИСПОЛЬЗОВАНИЕМ НЕЙРОНАВИГАЦИИ И НАПРАВИТЕЛЯ | 2023 |
|
RU2814763C1 |
Изобретение относится к травматологии и ортопедии и может быть применимо для использования оптической медицинской навигационной системы для визуализации и количественной оценки качества репозиции отломков при переломе кости таза. На подвижной части кости таза устанавливают третий позиционер с пассивными маркерами. На рентгеновском компьютерном томографе проводят регистрацию изображений неподвижной части кости таза с установленным на ней референтным позиционером с пассивными маркерами и подвижной части кости таза с установленным на ней третьим позиционером с пассивными маркерами. На рабочей станции рентгеновского компьютерного томографа проводят обработку изображений и строят 3D сегментированное изображение неподвижной части кости таза с установленным на ней референтным позиционером с пассивными маркерами и подвижной части кости таза с установленным на ней третьим позиционером с пассивными маркерами, а также области перелома. Результаты обработки по вычислительной сети передают в компьютер оптической медицинской навигационной системы и отображают на экране монитора хирургу для планирования и последующего управления хирургическими инструментами в ходе операции. На экране монитора на 3D сегментированном изображении неподвижной части кости таза и подвижной части кости таза хирургом в области перелома указываются точки соответствия, которые при совмещении подвижной части кости таза и неподвижной части кости таза во время операции необходимо максимально сблизить. Во время операции с использованием оптической медицинской навигационной системы производят геометрическую привязку референтного позиционера с пассивными маркерами и третьего позиционера с пассивными маркерами, установленных на пациенте и видимых стереовидеокамерами оптической медицинской навигационной системы к сегментированным 3D изображениям референтного позиционера с пассивными маркерами и третьего позиционера с пассивными маркерами и соответствующим им сегментированным неподвижной части кости таза и подвижной части кости таза. Во время операции «ручными» действиями сближают подвижную часть кости таза с неподвижной частью кости таза и устанавливают их в положение для последующей фиксации винтом. На монитор в реальном масштабе времени выводят 3D сегментированное изображение неподвижной части кости таза и подвижной части кости таза и информацию о расстояниях между точками соответствия в области перелома, которые необходимо максимально сблизить для обеспечения совмещения неподвижной части кости таза и подвижной части кости таза. Устанавливают второй позиционер с пассивными маркерами на дрель. Для прохождения спицы через желаемые области в неподвижной части кости таза и подвижной части кости таза задают направление засверливания спицы по схематическому изображению пассивных маркеров первого позиционера с пассивными маркерами, расположенных на направляющей спицы, и глубину засверливания спицы по схематическому изображению пассивных маркеров второго позиционера с пассивными маркерами относительно 3D изображения неподвижной части кости таз и подвижной части кости таза, отображаемых на экране монитора оптической медицинской навигационной системой. Далее засверливают дрелью спицу в неподвижную часть кости таза и подвижную часть кости таза. Удаляют направляющую спицу. По спице устанавливают скрепляющий подвижную часть кости таза и неподвижную часть кости таза винт. Удаляют спицу и проводит зашивание раны. Изобретение позволяет уменьшить лучевую нагрузку на пациента, увеличить функциональные возможности способа. 1 з.п. ф-лы, 3 ил.
1. Способ использования оптической медицинской навигационной системы для визуализации и количественной оценки качества репозиции отломков при переломе кости таза, включающий контроль во время операции положения неподвижной части кости таза (15), подвижной части кости таза (16) и области перелома (17), установку референтного позиционера с пассивными маркерами (12) на неподвижной части кости таза (15), определение - через какие области неподвижной части кости таза (15) и подвижной части кости таза (16) во время операции будет осуществляться фиксация подвижной части кости таза (16) к неподвижной части кости таза (15) винтом (14), установку первого позиционера с пассивными маркерами (9) на направляющую спицы (8), засверливание дрелью (11) спицы (7) в неподвижную часть кости таза (15) и подвижную часть кости таза (16), контроль направления спицы (7) с помощью оптической медицинской навигационной системы (1) по схематическому изображению на экране монитора (3) первого позиционера с пассивными маркерами (9), установленного на направляющей спицы (8), после засверливания спицы (7) проводят удаление направляющей спицы (8), установку скрепляющего подвижную часть кости таза (16) и неподвижную часть кости таза (15) винта (14), удаление спицы (7) и зашивание раны, отличающийся тем, что на подвижной части кости таза (16) устанавливают третий позиционер с пассивными маркерами (13), на рентгеновском компьютерном томографе (5) проводят регистрацию изображений неподвижной части кости таза (15) с установленным на ней референтным позиционером с пассивными маркерами (12) и подвижной части кости таза (16) с установленным на ней третьим позиционером с пассивными маркерами (13), на рабочей станции (6) рентгеновского компьютерного томографа (5) проводят обработку изображений и строят 3D сегментированное изображение неподвижной части кости таза (15) с установленным на ней референтным позиционером с пассивными маркерами (12) и подвижной части кости таза (16) с установленным на ней третьим позиционером с пассивными маркерами (13), а также области перелома (17), результаты обработки по вычислительной сети передают в компьютер (2) оптической медицинской навигационной системы (1) и отображают на экране-мониторе (3) хирургу для планирования и последующего управления хирургическими инструментами в ходе операции, на экране монитора (3) на 3D сегментированном изображении неподвижной части кости таза (15) и подвижной части кости таза (16) хирургом в области перелома (17) указываются точки соответствия, которые при совмещении подвижной части кости таза (16) и неподвижной части кости таза (15) во время операции необходимо максимально сблизить, во время операции с использованием оптической медицинской навигационной системы (1) производят геометрическую привязку референтного позиционера с пассивными маркерами (12) и третьего позиционера с пассивными маркерами (13) установленных на пациенте и видимых стереовидеокамерами (4) оптической медицинской навигационной системы (1) к сегментированным 3D изображениям референтного позиционера с пассивными маркерами (12) и третьего позиционера с пассивными маркерами (13) и соответствующим им сегментированным неподвижной части кости таза (15) и подвижной части кости таза (16), во время операции «ручными» действиями хирург сближает подвижную часть кости таза (16) с неподвижной частью кости таза (15) и устанавливает их в положение для последующей фиксации винтом (14), при этом на монитор (3) в реальном масштабе времени выводится 3D сегментированное изображение неподвижной части кости таза (15) и подвижной части кости таза (16) и информация о расстояниях между точками соответствия в области перелома (17), которые необходимо максимально сблизить для обеспечения совмещения неподвижной части кости таза (15) и подвижной части кости таза (16), далее хирург устанавливает второй позиционер с пассивными маркерами (10) на дрель (11), для прохождения спицы (7) через желаемые области в неподвижной части кости таза (15) и подвижной части кости таза (16) хирург задает направление засверливания спицы (7) по схематическому изображению пассивных маркеров первого позиционера с пассивными маркерами (9), расположенных на направляющей спицы (8), и глубину засверливания спицы (7) по схематическому изображению пассивных маркеров второго позиционера с пассивными маркерами (10) относительно 3D изображения неподвижной части кости таз (15) и подвижной части кости таза (16), отображаемых на экране монитора (3) оптической медицинской навигационной системой (1), далее хирург засверливает дрелью (11) спицу (7) в неподвижную часть кости таза (15) и подвижную часть кости таза (16), затем удаляет направляющую спицы (8), по спице (7) устанавливает скрепляющий подвижную часть кости таза (16) и неподвижную часть кости таза (15) винт (14), удаляет спицу (7) и проводит зашивание раны.
2. Способ по п. 1, отличающийся тем, что во время операции получают количественную оценку, характеризующую точность совмещения неподвижной части кости таза (15) и подвижной части кости таза (16).
| PHILIPP SCHWABE et al | |||
| Three-Dimensional Fluoroscopy-Navigated Percutaneous Screw Fixation of Acetabular Fracture | |||
| J Orthop Trauma, 2014, vol | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| МОБИЛЬНЫЙ МАЛОГАБАРИТНЫЙ РЕНТГЕНОВСКИЙ АППАРАТ | 2006 |
|
RU2334465C1 |
| US 0005527310 A1, 18.06.1996 | |||
| АНКИН Л.Н | |||
| и др | |||
| Практическая травматология | |||
| М.: Книга плюс, 2002, с | |||
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |

