Изобретение относится к космической технике, в частности к стыковочным устройствам космических аппаратов, построенных на базе открытой модульной архитектуры, а также аппаратов формата Cubesat, обеспечивая жесткое механическое соединение отдельных модулей космического аппарата как в автоматическом, так и в ручном режиме.
Известно стыковочное устройство для космических аппаратов типа «штырь-конус», использующееся для стыковки кораблей «Союз» и «Прогресс» к международной космической станции (МКС) (B.C. Сыромятников «100 рассказов о стыковке», ч. 1, изд. Москва, Логос, 2003 г.). Недостатком данного устройства является ограниченное позиционирование стыкуемых модулей, определенное типом стыковочного узла. Существует возможность изменения активного стыковочного агрегата в пассивный за счет установки в активный узел со «штырем» крышки с приемным конусом и наоборот (B.C. Сыромятников «100 рассказов о стыковке», ч. 1, изд. Москва, Логос, 2003 г.).
Решение неэффективно для космических аппаратов на базе открытой модульной архитектуры, так как имеет ограниченную андрогинность (один узел не является активным и пассивным одновременно). Это означает, что космический аппарат теряет функциональность в случае внештатных ситуаций при выходе из строя одного из стыковочных замков, так как ремонт, а именно замена одного модуля или части аппарата с ограниченной андрогинностью на орбите, усложняется. Также конструкция стыковочного узла предусматривает стыковку модулей или отдельных аппаратов только в осевом направлении или около осевом, что ограничивает перечень доступных конфигураций в случае сборки или ремонта аппарата на орбите роботизированной автоматической рукой или вручную на МКС, т.е. значительно усложняет сборку и ремонт любой возможной конфигурации аппарата (например, замена модуля в центре аппарата 3 модуля × 3 модуля - «куб из кубов»).
Существует стыковочное устройство для космических аппаратов типа «штырь-конус», решающее проблему ограниченной андрогинности предыдущего устройства (RU №2 584 042) за счет введения в приемную воронку пассивного стыковочного узла дополнительной оболочки реверсивного действия, позволяющей осуществить стыковку с активным или пассивным ответным стыковочным агрегатом, но не позволяющее при этом решить проблему удобной сборки и ремонта любой возможной конфигурации космического аппарата на базе открытой модульной архитектуры.
Известен агрегат стыковочный пассивный (RU №2 349 517), наследующий принцип соединения «штырь-конус». Данный агрегат решает проблему многоразовой стыковки крупногабаритных отсеков МКС, но не позволяет решить проблему ограниченной андрогинности. Проблему удобной сборки и ремонта на орбите любой возможной конфигурации космического аппарата на базе открытой модульной архитектуры конструкция данного агрегата также не решает.
Наиболее близким из аналогов (прототипов) агрегатов, используемых в проектировании космических аппаратов на базе открытой модульной архитектуры, является андрогинный стыковочный агрегат (DE102014104695). Стыковка отдельных модулей происходит за счет механизированного автоматического байонетного соединения. При этом каждый из агрегатов, установленных на аппарате, может выполнять функцию пассивного и активного узла одновременно. Во время стыковки соединительный элемент активного модуля перемещается в осевом направлении и входит в ответную часть пассивного модуля. Далее соединительный элемент проворачивается вокруг оси на 90 градусов и обратным осевым перемещением за счет определенной траектории направляющей упирается в соединительный элемент пассивного узла, тем самым выполняя поджатие одного модуля к другому. Фиксация (стопорение) модулей, а именно защита модулей от проворота, происходит в момент поджатия пассивного модуля активным за счет штифтов, которые выдвигаются в осевом направлении и входят в ответные отверстия противоположного модуля. Это уменьшает осевой момент инерции аппарата и увеличивает жесткость соединения, а также позволяет производить сборку любой возможной конфигурации космического аппарата на базе открытой модульный архитектуры. Но данная конструкция узла является сложной, что позволяет использовать данное устройство только в качестве центрального (имеет ограниченную масштабируемость), что значительно увеличивает вес модуля и уменьшает осевой момент сопротивления стыка.
Техническим результатом предлагаемого стыковочного устройства для космических аппаратов на базе открытой модульной архитектуры является снижение веса устройства, обеспечение удобной сборки-разборки космического аппарата на орбите, увеличение осевого момента сопротивления стыка, а также редуцирование конструкции узла.
Указанный технический результат достигается за счет того, что в андрогинном стыковочном агрегате космического аппарата на базе открытой модульной архитектуры, выполняющим стыковку за счет механизированного автоматического байонетного соединения с помощью выдвигающегося кулачковым механизмом на приводе вращения соединительного элемента активного агрегата, фиксация (защита от проворота) которого происходит штифтами, выдвигающимися в осевом направлении, в ответных отверстиях противоположного модуля в отличие от известного функцию соединительного элемента выполняют раскрывающиеся кулачковым механизмом лепестки-эксцентрики за счет соединения «винт-гайка» втулки с кулачками и привода осевого перемещения, установленного в корпусе привода осевого перемещения, который в свою очередь может совершать перемещение вокруг продольной оси за счет механической связи в редукторе с приводом вращения, позволяющим провести фиксацию и центровку модулей космического аппарата на базе открытой модульной архитектуры, за счет совместного поворота нескольких пар стыковочных агрегатов, установленных на одной панели корпуса модуля космического аппарата.
Данная конструкция стыковочного узла обладает рядом преимуществ и решает проблемы прототипа. В стыковочном узле в качестве захвата ответного устройства используются лепестки-эксцентрики, позволяющие за счет закрепления на приводе осевого перемещения (передача винт-гайка), который в свою очередь связан с приводом вращения, использовать узел как в качестве активного, так и в качестве пассивного агрегата. Упрощенная конструкция устройства позволяет использовать его в качестве углового стыковочного узла, что дает возможность значительно увеличить осевой момент сопротивления стыка модулей за счет использования нескольких пар стыковочных агрегатов в одной плоскости стыка. Возможность поворота узла вокруг оси вращения позволяет производить сборку любой конфигурации модульного космического аппарата, а при использовании устройства в качестве углового, центрировать один модуль относительно другого за счет совместного поворота всех узлов, установленных на одной грани корпуса космического аппарата.
Сущность изобретения поясняется следующими фиг.1-5, на которых изображены:
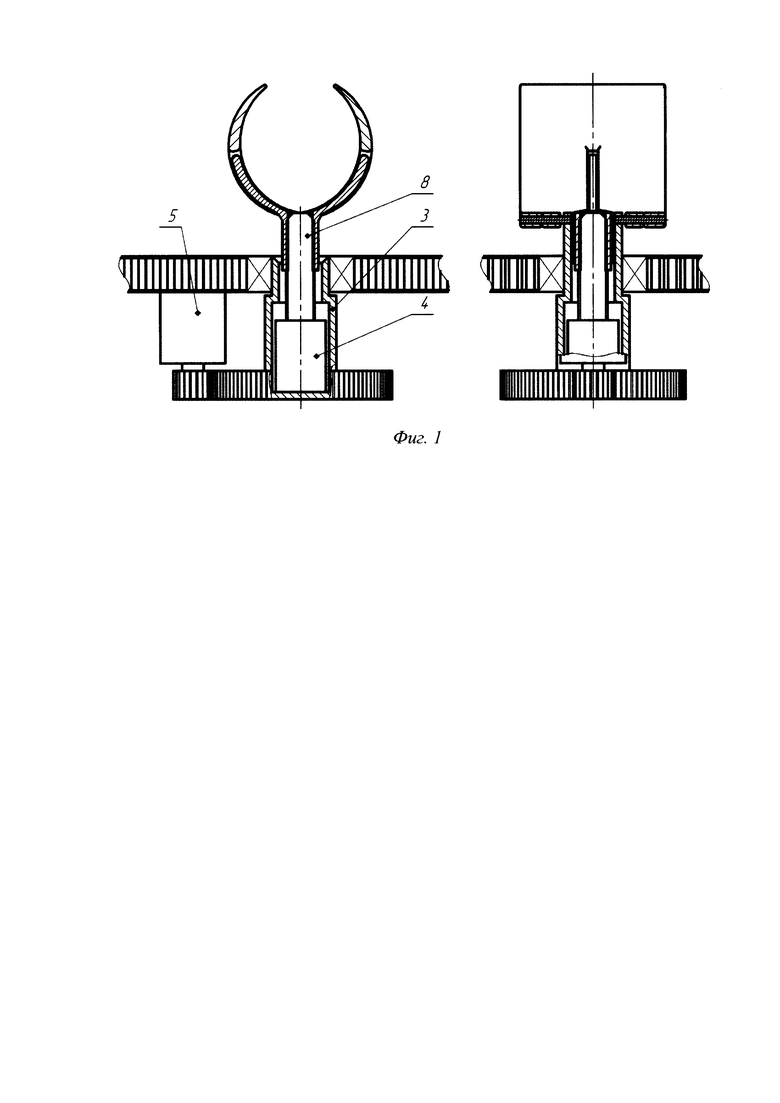
Фиг. 1 - вид в разрезе стыковочного агрегата (часть 1);
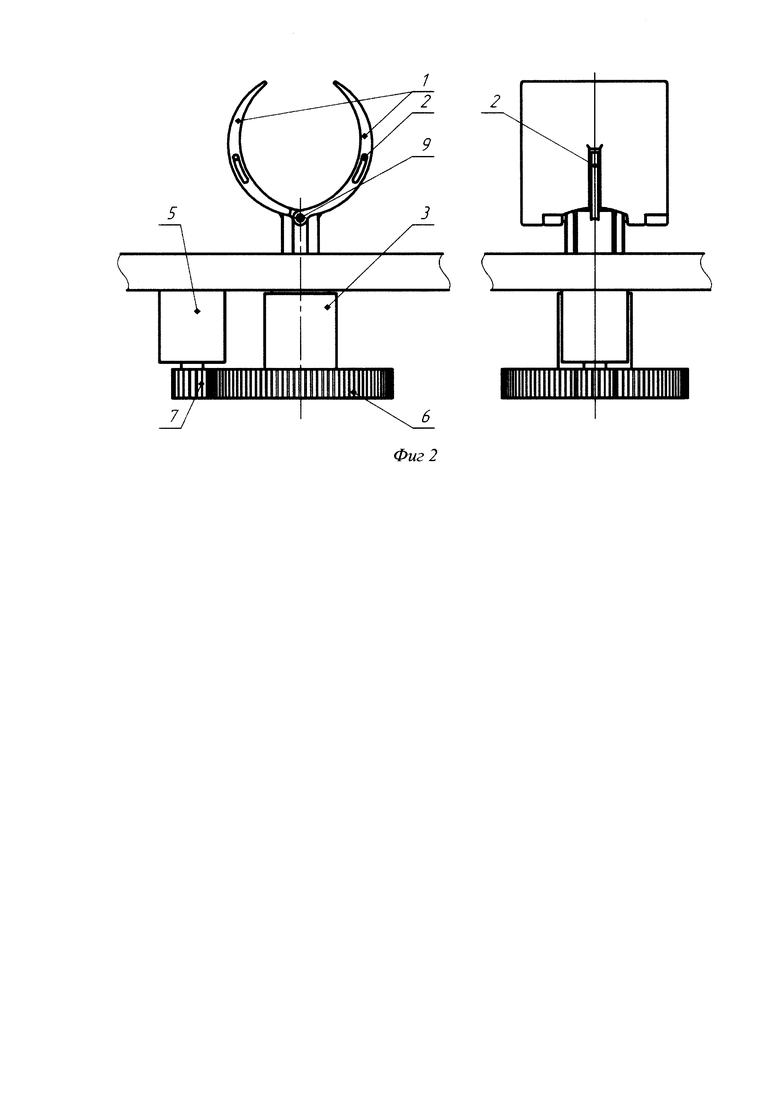
Фиг. 2 - вид в разрезе стыковочного агрегата (часть 2);
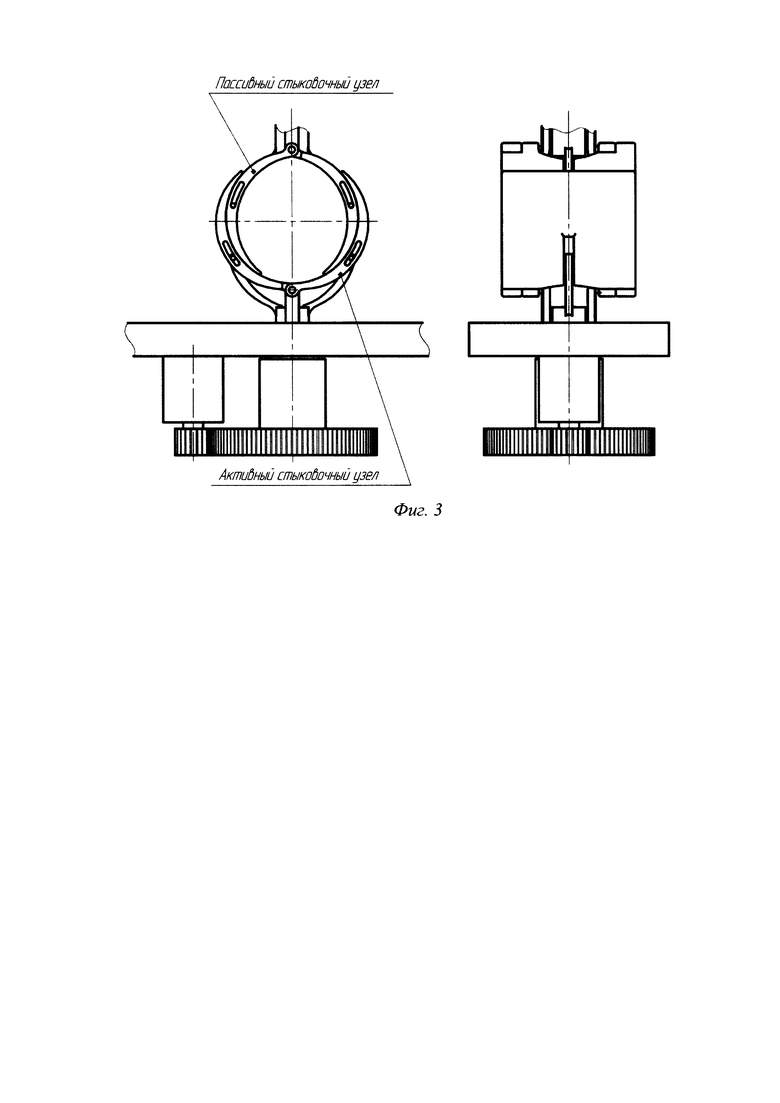
Фиг. 3 - схема раскрытия лепестков-эксцентриков;
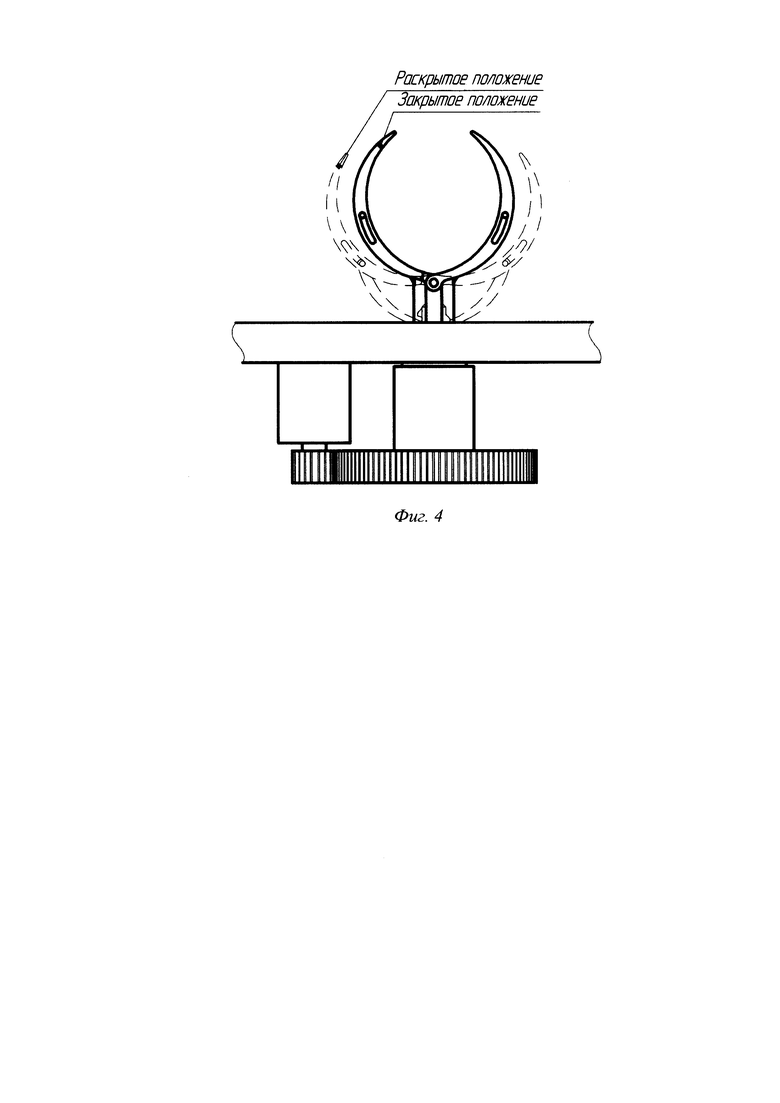
Фиг. 4 - соединение активного и пассивного стыковочных агрегатов;
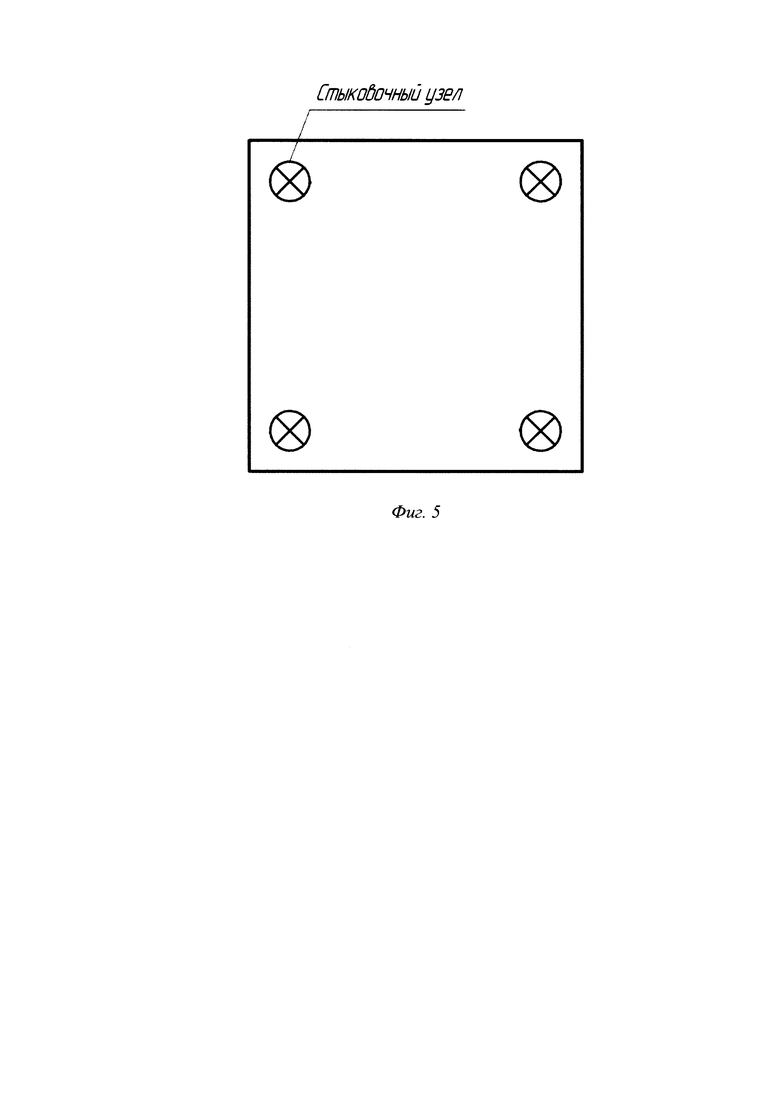
Фиг. 5 - схема (пример) расположения стыковочных устройств на одной панели корпуса космического аппарата.
В состав стыковочного устройства входят:
1 - лепестки-эксцентрики с датчиками, установленные через втулки 9 на корпусе привода осевого перемещения 3.
2 - втулка с кулачками, совершающая перемещение вдоль оси за счет вращения винта 8 электроприводом осевого перемещения 4;
5 - электропривод вращения, передающий вращение с зубчатого колеса 7 на зубчатое колесо 6 корпуса привода осевого перемещения. Для увеличения точности позиционирования может использоваться планетарный редуктор.
Стыковка происходит следующим образом. Модуль космического аппарата на базе открытой модульной архитектуры подводится к ответному модулю при помощи автоматической роботизированной руки на орбите или вручную на МКС. В случае пассивного модуля все стыковочные замки находятся в закрытом положении, в случае активного модуля - в раскрытом (фиг. 3). Расчетное количество пар стыковочных узлов в плоскости стыка 4. Когда лепестки-эксцентрики 1 пассивного стыковочного узла находятся в ответных лепестках 1 активного стыковочного узла, с датчиков лепестков активного устройства подается сигнал в бортовой компьютер модуля, включается электропривод осевого перемещения 3. Вращение винта 8 вызывает осевое перемещение втулки с кулачками 2, переводя лепестки-эксцентрики 1 активного устройства в закрытое положение. Точное позиционирование одного модуля относительно другого обеспечивается в закрытом положении лепестков 1 за счет вращения корпуса привода осевого перемещения 3 через зубчатые колеса 6 и 7 электроприводом вращения 5. Минимальное угловое смещение стыковочных узлов обеспечивает автоматическую центровку одного модуля относительно другого и фиксацию модуля в плоскости стыка. В случае, если перед стыковкой модулей один из стыковочных узлов находится в неправильном угловом положении, происходит выравнивание одного узла относительно другого электроприводом вращения 5. Соединение пассивного и активного стыковочных узлов представлено на фиг. 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2584042C2 |
| АНДРОГИННОЕ СТЫКОВОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКИХ КОРАБЛЕЙ | 2005 |
|
RU2291821C1 |
| АНДРОГИННОЕ СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ МОДУЛЕЙ И СООТВЕТСТВУЮЩИЕ МОДУЛИ | 2015 |
|
RU2662329C2 |
| Способ стыковки космических аппаратов к вращающемуся космическому кораблю и устройство для его реализации | 2020 |
|
RU2788620C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2490183C1 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2706639C2 |
| УСТРОЙСТВО СТЯГИВАНИЯ ПЕРИФЕРИЙНОГО СТЫКОВОЧНОГО МЕХАНИЗМА | 2018 |
|
RU2706741C1 |
| ПЛАНИРУЮЩИЙ КОСМИЧЕСКИЙ АППАРАТ (ВАРИАНТЫ) СО СТВОРЧАТЫМ ГОЛОВНЫМ ОБТЕКАТЕЛЕМ И СПОСОБ УПРАВЛЕНИЯ ЕГО ВОЗВРАЩЕНИЕМ НА АЭРОДРОМ | 2011 |
|
RU2479469C1 |
| АГРЕГАТ СТЫКОВОЧНЫЙ ПАССИВНЫЙ | 2007 |
|
RU2349517C1 |
| УСТРОЙСТВО СТЫКОВКИ КОСМИЧЕСКИХ МОДУЛЕЙ | 2003 |
|
RU2269462C2 |
Изобретение относится к области космической техники, а именно к стыковочным устройствам космических аппаратов. Стыковочный агрегат обеспечивает соединение за счет лепестков, раскрывающихся кулачковым механизмом и приводом осевого перемещения. Привод осевого перемещения может совершать перемещение вокруг продольной оси за счет механической связи в редукторе с приводом вращения. Это позволяет провести фиксацию и центровку модулей космического аппарата за счет совместного углового поворота нескольких пар стыковочных агрегатов, установленных на одной панели корпуса модуля космического аппарата. Достигается снижение веса устройства, обеспечение удобства стыковки космических аппаратов, увеличение прочности соединения. 5 ил.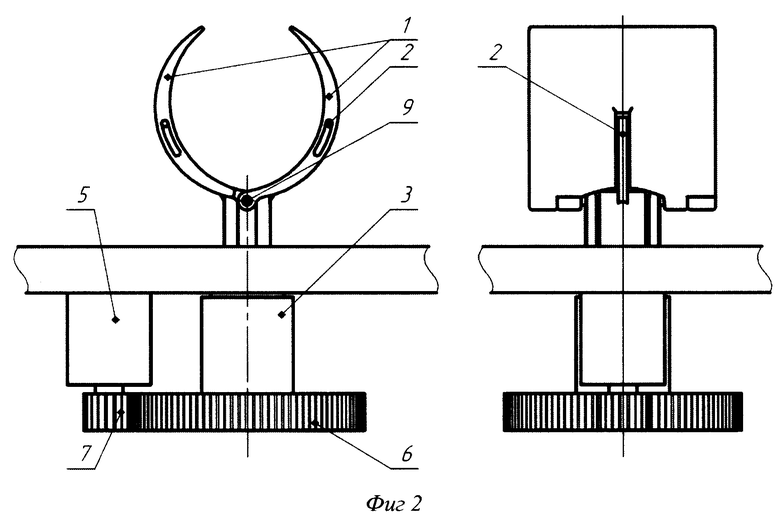
Андрогинный стыковочный агрегат космического аппарата на базе открытой модульной архитектуры, выполняющий стыковку за счет механизированного автоматического байонетного соединения с помощью выдвигающегося кулачковым механизмом на приводе вращения соединительного элемента активного агрегата, фиксация и защита от проворота которого происходит выдвигающихся в осевом направлении штифтами, в ответных отверстиях противоположного модуля, отличающийся тем, что функцию соединительного элемента выполняют раскрывающиеся кулачковым механизмом лепестки-эксцентрики за счет соединения винт-гайка втулки с кулачками и привода осевого перемещения, установленного в корпусе привода осевого перемещения, который в свою очередь может совершать перемещение вокруг продольной оси за счет механической связи в редукторе с приводом вращения, позволяющим провести фиксацию и центровку модулей космического аппарата на базе открытой модульной архитектуры за счет совместного углового поворота нескольких пар стыковочных агрегатов, установленных на одной панели корпуса модуля космического аппарата.
| DE 102014104695 A1, 08.10.2015 | |||
| JP 2964656 B2, 18.10.1999 | |||
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ СУППОЗИТОРИЕВ и ДРУГИХ АНАЛОГИЧНЫХ ЛЕКАРСТВЕННЫХ ФОРМ | 0 |
|
SU181772A1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2584042C2 |
| МАССА ДЛЯ ИЗГОТОВЛЕНИЯ СИЛИКАТНЫХ ИЗДЕЛИЙ | 0 |
|
SU298559A1 |
