ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] Настоящая заявка представляет собой переведенную на национальную фазу международную заявку PCT/CN2020/093515, поданную 29 мая 2020 г., содержание которой включено в настоящее описание посредством ссылки.
Область техники, к которой относится изобретение
[0002] Изобретение относится к области технологий связи и, в частности, к способу и устройству для перевыбора соты, а также к носителю данных.
Предпосылки создания изобретения
[0003] В предшествующем уровне техники терминал перевыбирает соту для наземной сети на основе критерия S и критерия R.
[0004] С развитием сетей пятого поколения (5G, 5-th Generation) были введены "неназемные" сети (NTN, Non-Terrestrial Network). Для сети NTN радиус соты больше, а разница мощностей принимаемых опорных сигналов (RSRP, Reference Signal Received Power) или значений качества принимаемых опорных сигналов (RSRQ, Reference Signal Received Quality) при нахождении терминала в центре или на краю соты мала; поскольку радиус соты больше, область перекрытия сот относительно велика.
Сущность изобретения
[0005] Для решения проблем предшествующего уровня техники, изобретение предлагает способ и устройство для перевыбора соты, а также носитель данных.
[0006] В соответствии с первым аспектом вариантов осуществления настоящего изобретения, предлагается способ перевыбора соты, включающий: получение эталонного порогового значения расстояния соты и определение фактического расстояния между терминалом и центром соты; и выполнение перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния.
[0007] В возможной реализации сота является обслуживающей сотой терминала, и, в ответ на то, что значение уровня приема при выборе соты больше, чем пороговое значение мощности принимаемого опорного сигнала для внутричастотных измерений, значение качества при выборе соты больше, чем пороговое значение качества принимаемого опорного сигнала для внутричастотных измерений, и эталонное пороговое значение расстояния обслуживающей соты больше, чем фактическое расстояние между терминалом и центром обслуживающей соты, не выполняют измерение для внутричастотных соседних сот.
[0008] В другой возможной реализации целевая сота, полученная путем выполнения перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния, удовлетворяет следующим условиям: значение уровня приема при выборе соты для целевой соты больше 0, значение качества при выборе соты для целевой соты больше 0, и эталонное пороговое значение расстояния целевой соты больше, чем фактическое расстояние между терминалом и центром целевой соты.
[0009] В еще одной возможной реализации выполнение перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния включает: определение значений R множества сот на основе критерия R для перевыбора соты, при этом множество сот включает соседние соты и обслуживающую соту; в ответ на наличие соседних сот со значениями R выше, чем значение R обслуживающей соты, и удовлетворяющих критерию S для перевыбора соты, выбор соседней соты с эталонным пороговым значением расстояния, большим или равным фактическому расстоянию, из соседних сот со значениями R выше, чем значение R обслуживающей соты; в ответ на наличие соседних сот с эталонными пороговыми значениями расстояния, большими или равными фактическим расстояниям, среди соседних сот со значениями R выше, чем значение R обслуживающей соты, выбор соседней соты с наибольшим значением R среди соседних сот с эталонными пороговыми значениями расстояния, большими или равными фактическим расстояниям, в качестве перевыбранной соты; и, в ответ на отсутствие соседней соты с эталонным пороговым значением расстояния, большим или равным фактическому расстоянию, среди соседних сот со значениями R выше, чем значение R обслуживающей соты, выполнение перевыбора соты на основе эталонного порогового значения расстояния обслуживающей соты и фактического расстояния между терминалом и центром обслуживающей соты.
[0010] В еще одной возможной реализации выполнение перевыбора соты на основе эталонного порогового значения расстояния обслуживающей соты и фактического расстояния между терминалом и центром обслуживающей соты включает: в ответ на то, что эталонное пороговое значение расстояния обслуживающей соты больше или равно фактическому расстоянию между терминалом и центром обслуживающей соты, нахождение в обслуживающей соте; и, в ответ на то, что эталонное пороговое значение расстояния обслуживающей соты меньше фактического расстояния между терминалом и центром обслуживающей соты, выбор соседней соты с наибольшим значением R среди соседних сот со значениями R выше, чем значение R обслуживающей соты, в качестве перевыбранной соты.
[0011] В еще одной возможной реализации выполнение перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния включает: выбор сот, которые удовлетворяют следующим условиям: значения уровня приема при выборе соты больше 0, значения качества при выборе соты больше 0, и эталонные пороговые значения расстояния превышают фактические расстояния; определение значений R множества сот из выбранных сот на основе критерия R для перевыбора сот; и, в ответ на наличие соседних сот с определенными значениями R, превышающими значение R обслуживающей соты, выбор соседней соты с наибольшим значением R среди соседних сот с определенными значениями R, превышающими значение R обслуживающей соты, в качестве перевыбранной соты.
[0012] В еще одной возможной реализации определение фактического расстояния между терминалом и центром соты включает: определение информации о местоположении терминала и получение эталонной информации о местоположении соты, предоставляемой сетевым устройством; и определение фактического расстояния между терминалом и центром соты на основе информации о местоположении терминала и эталонной информации о местоположении соты.
[0013] В еще одной возможной реализации определение фактического расстояния между терминалом и центром соты включает: определение информации о местоположении терминала и передачу информации о местоположении на сетевое устройство; и получение фактического расстояния между терминалом и центром соты, определенного сетевым устройством на основе эталонной информации о местоположении терминала и информации о местоположении соты.
[0014] В еще одной возможной реализации получение эталонного порогового значения расстояния соты включает получение эталонного порогового значения расстояния соты на основе системного широковещательного сообщения обслуживающей соты и/или соседней соты.
[0015] В соответствии со вторым аспектом вариантов осуществления изобретения, предлагается способ перевыбора соты, который включает: передачу эталонного порогового значения расстояния соты, при этом эталонное пороговое значение расстояния сконфигурировано для выполнения терминалом перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния между терминалом и центром соты.
[0016] В варианте реализации способ также включает: передачу эталонной информации о местоположении соты, при этом эталонная информация о местоположении соты сконфигурирована для определения терминалом фактического расстояния.
[0017] В другой возможной реализации способ также включает: получение информации о местоположении терминала; определение фактического расстояния между терминалом и центром соты на основе информации о местоположении терминала и эталонной информации о местоположении соты; и передачу фактического расстояния на терминал.
[0018] В еще одной возможной реализации целевая сота, полученная путем выполнения терминалом перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния, удовлетворяет следующим условиям: значение уровня приема при выборе соты для целевой соты больше 0, значение качества при выборе соты для целевой соты больше 0, и эталонное пороговое значение расстояния целевой соты больше фактического расстояния между терминалом и центром целевой соты.
[0019] В соответствии с третьим аспектом вариантов осуществления изобретения, предлагается устройство для перевыбора соты, которое содержит: блок получения, сконфигурированный для получения эталонного порогового значения расстояния соты и определения фактического расстояния между терминалом и центром соты; и блок обработки, сконфигурированный для выполнения перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния.
[0020] В варианте реализации сота является обслуживающей сотой терминала, и блок обработки также сконфигурирован так, чтобы: в ответ на то, что значение уровня приема при выборе соты больше, чем пороговое значение мощности принимаемого опорного сигнала для внутричастотных измерений, значение качества при выборе соты больше, чем пороговое значение качества принимаемого опорного сигнала для внутричастотных измерений, и эталонное пороговое значение расстояния обслуживающей соты больше, чем фактическое расстояние между терминалом и центром обслуживающей соты, не выполнять измерение для внутричастотных соседних сот.
[0021] В другой возможной реализации целевая сота, полученная путем выполнения перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния, удовлетворяет следующим условиям: значение уровня приема при выборе соты для целевой соты больше 0, значение качества при выборе соты для целевой соты больше 0, и эталонное пороговое значение расстояния целевой соты больше, чем фактическое расстояние между терминалом и центром целевой соты.
[0022] В еще одной возможной реализации блок обработки сконфигурирован для выполнения перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния посредством: определения значений R множества сот на основе критерия R для перевыбора соты, при этом множество сот включает соседние соты и обслуживающую соту; в ответ на наличие соседних сот со значениями R выше, чем значение R обслуживающей соты, и удовлетворяющих критерию S для перевыбора соты, выбор соседней соты с эталонным пороговым значением расстояния, большим или равным фактическому расстоянию, из соседних сот со значениями R выше, чем значение R обслуживающей соты; в ответ на наличие соседних сот с эталонными пороговыми значениями расстояния, большими или равными фактическим расстояниям, среди соседних сот со значениями R выше, чем значение R обслуживающей соты, выбор соседней соты с наибольшим значением R среди соседних сот с эталонными пороговыми значениями расстояния, большими или равными фактическим расстояниям, в качестве перевыбранной соты; и, в ответ на отсутствие соседней соты с эталонным пороговым значением расстояния, большим или равным фактическому расстоянию, среди соседних сот со значениями R выше, чем значение R обслуживающей соты, выполнение перевыбора соты на основе эталонного порогового значения расстояния обслуживающей соты и фактического расстояние между терминалом и центром обслуживающей соты.
[0023] В еще одной возможной реализации блок обработки сконфигурирован для выполнения перевыбора соты на основе эталонного порогового значения расстояния обслуживающей соты и фактического расстояния между терминалом и центром обслуживающей соты посредством следующего: в ответ на то, что эталонное пороговое значение расстояния обслуживающей соты больше или равно фактическому расстоянию между терминалом и центром обслуживающей соты, нахождение в обслуживающей соте; и, в ответ на то, что эталонное пороговое значение расстояния обслуживающей соты меньше фактического расстояния между терминалом и центром обслуживающей соты, выбор соседней соты с наибольшим значением R среди соседних сот со значениями R выше, чем значение R обслуживающей соты, в качестве перевыбранной соты.
[0024] В еще одной возможной реализации блок обработки сконфигурирован для выполнения перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния посредством: выбора сот, которые удовлетворяют следующим условиям: значения уровня приема при выборе соты больше 0, значения качества при выборе соты больше 0, и эталонные пороговые значения расстояния превышают фактические расстояния; определения значений R множества сот из выбранных сот на основе критерия R для перевыбора сот; и, в ответ на наличие соседних сот с определенными значениями R, превышающими значение R обслуживающей соты, выбора соседней соты с наибольшим значением R среди соседних сот с определенными значениями R, превышающими значение R обслуживающей соты, в качестве перевыбранной соты.
[0025] В еще одной возможной реализации блок получения сконфигурирован для определения фактического расстояния между терминалом и центром соты посредством: определения информации о местоположении терминала и получения эталонной информации о местоположении соты, предоставляемой сетевым устройством; и определения фактического расстояния между терминалом и центром соты на основе информации о местоположении терминала и эталонной информации о местоположении соты.
[0026] В еще одной возможной реализации блок получения сконфигурирован для определения фактического расстояния между терминалом и центром соты посредством: определения информации о местоположении терминала и передачи информации о местоположении на сетевое устройство; и получения фактического расстояния между терминалом и центром соты, определенного сетевым устройством на основе информации о местоположении терминала и эталонной информации о местоположении соты.
[0027] В еще одной возможной реализации блок получения сконфигурирован для получения эталонного порогового значения расстояния соты посредством: получения эталонного порогового значения расстояния соты на основе системного широковещательного сообщения обслуживающей соты и/или соседней соты.
[0028] В соответствии с четвертым аспектом вариантов осуществления изобретения, предлагается устройство для перевыбора соты, содержащее: блок передачи, сконфигурированный для передачи эталонного порогового значения расстояния соты, при этом эталонное пороговое значение расстояния сконфигурировано для выполнения терминалом перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния между терминалом и центром соты.
[0029] В варианте реализации блок передачи также сконфигурирован для передачи эталонной информации о местоположении соты, при этом эталонная информация о местоположении соты сконфигурирована для определения терминалом фактического расстояния.
[0030] В другой возможной реализации устройство также содержит: блок получения, сконфигурированный для получения информации о местоположении терминала; и блок обработки, сконфигурированный для определения фактического расстояния между терминалом и центром соты на основе информации о местоположении терминала и эталонной информации о местоположении соты, при этом блок передачи также сконфигурирован для передачи фактического расстояния на терминал.
[0031] В еще одной возможной реализации целевая сота, полученная путем выполнения терминалом перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния, удовлетворяет следующим условиям: значение уровня приема при выборе соты для целевой соты больше 0, значение качества при выборе соты для целевой соты больше 0, и эталонное пороговое значение расстояния целевой соты больше, чем фактическое расстояние между терминалом и центром целевой соты.
[0032] Согласно пятому аспекту вариантов осуществления изобретения, предлагается устройство для перевыбора соты, содержащее: процессор и память для хранения команд, исполняемых процессором, при этом процессор сконфигурирован для выполнения способа, описанного в первом аспекте или любой из возможных реализаций первого аспекта.
[0033] В соответствии с шестым аспектом вариантов осуществления изобретения, предлагается устройство для перевыбора соты, которое содержит: процессор и память для хранения команд, исполняемых процессором, при этом процессор сконфигурирован для выполнения способа, описанного во втором аспекте или любой из возможных реализаций второго аспекта.
[0034] В соответствии с седьмым аспектом вариантов осуществления изобретения, предлагается машиночитаемый носитель для хранения данных. Когда команды на носителе данных выполняются процессором мобильного терминала, мобильный терминал выполняет способ, описанный в первом аспекте или любой из возможных реализаций первого аспекта.
[0035] В соответствии с восьмым аспектом вариантов осуществления изобретения, предлагается машиночитаемый носитель для хранения данных. Когда команды на носителе данных выполняются процессором сетевого устройства, сетевое устройство выполняет способ, описанный во втором аспекте или любой из возможных реализаций второго аспекта.
[0036] Технические решения, предлагаемые в вариантах осуществления изобретения, могут обеспечивать следующие преимущества. Терминал выполняет перевыбор соты на основе эталонного порогового значения расстояния соты и фактического расстояния между терминалом и центром соты, так что перевыбор соты выполняется в сочетании с условиями расстояния между терминалом и сотой и, кроме того, применим к сети NTN с большим радиусом соты.
[0037] Следует понимать, что как вышеприведенное общее описание, так и последующее подробное описание являются только иллюстративными и пояснительными и не ограничивают изобретение.
Краткое описание чертежей
[0038] Прилагаемые чертежи, которые включены в настоящее описание и составляют его часть, иллюстрируют варианты осуществления, соответствующие изобретению, и вместе с описанием поясняют принципы изобретения.
[0039] Фиг. 1 представляет собой схему архитектуры системы связи согласно некоторым вариантам осуществления.
[0040] Фиг. 2 представляет собой блок-схему, показывающую способ перевыбора соты согласно некоторым вариантам осуществления.
[0041] Фиг. 3 представляет собой блок-схему, показывающую способ перевыбора соты согласно некоторым вариантам осуществления.
[0042] Фиг. 4 представляет собой блок-схему, показывающую способ перевыбора соты на основе эталонного порогового значения расстояния соты и фактического расстояния между терминалом и центром соты, согласно некоторым вариантам осуществления.
[0043] Фиг. 5 представляет собой блок-схему, показывающую способ перевыбора соты на основе эталонного порогового значения расстояния соты и фактического расстояния между терминалом и центром соты, согласно некоторым вариантам осуществления.
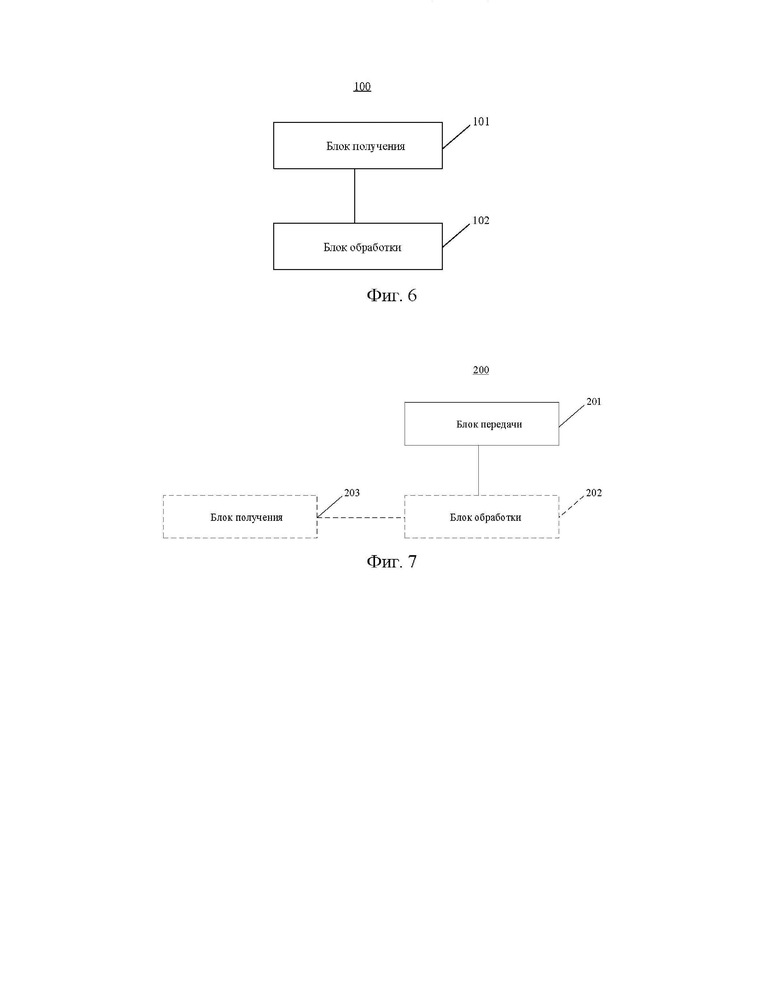
[0044] Фиг. 6 представляет собой структурную схему, показывающую устройство для перевыбора соты согласно некоторым вариантам осуществления.
[0045] Фиг. 7 представляет собой структурную схему, показывающую устройство для перевыбора соты согласно некоторым вариантам осуществления.
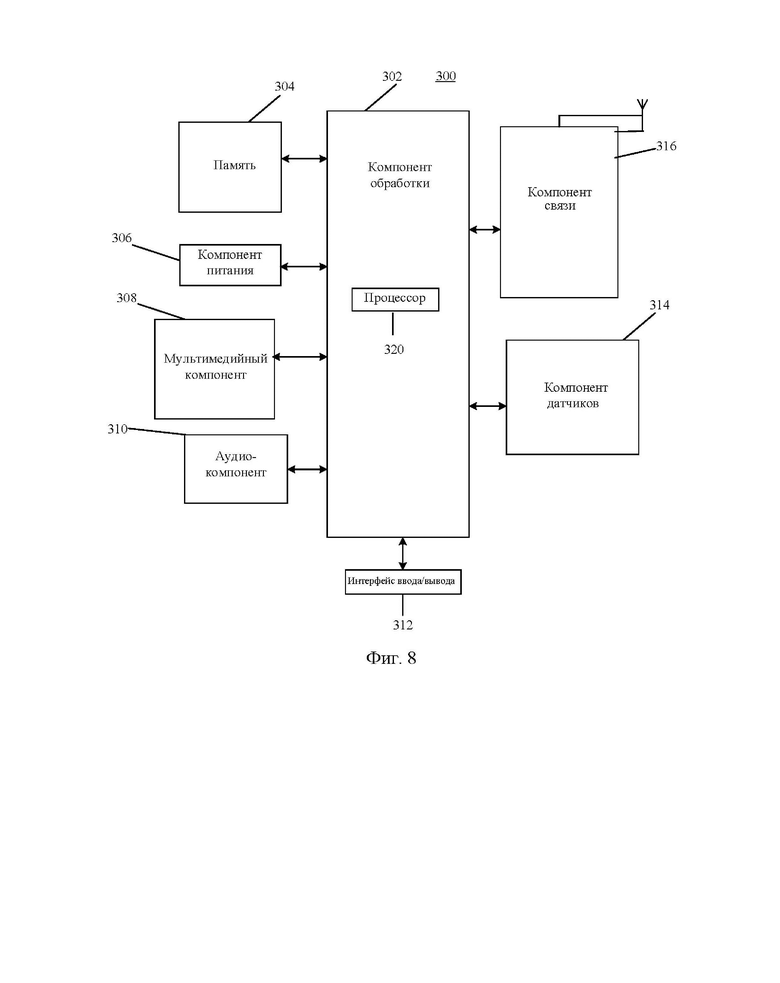
[0046] Фиг. 8 представляет собой структурную схему, показывающую устройство для перевыбора соты согласно некоторым вариантам осуществления.
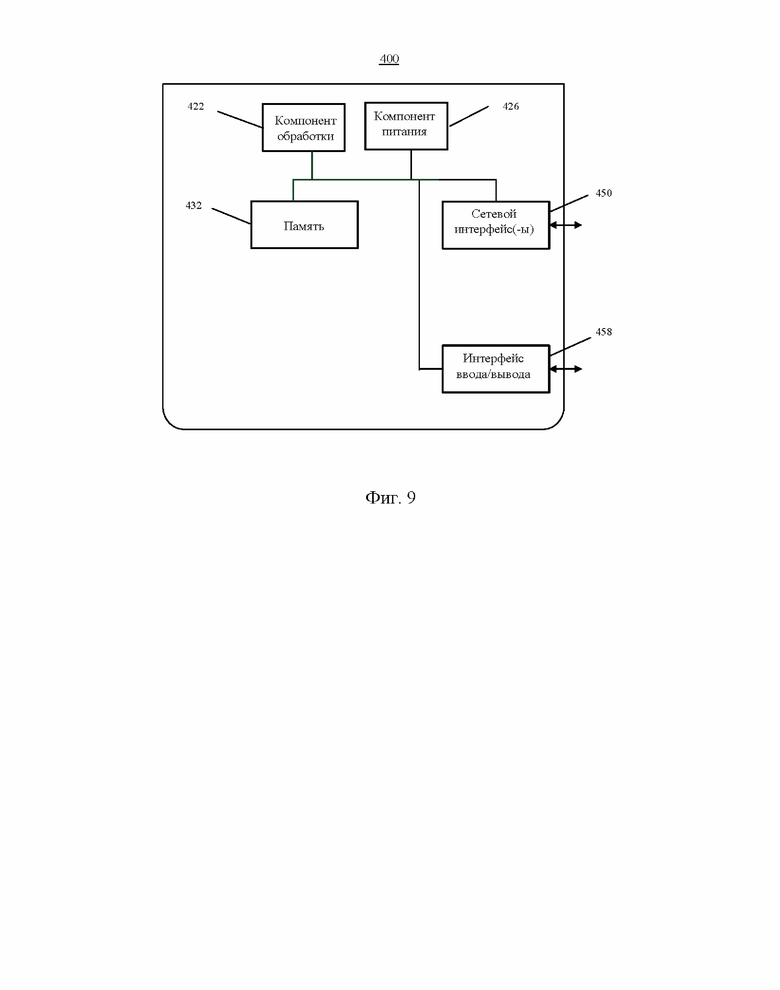
[0047] Фиг. 9 представляет собой структурную схему, показывающую устройство для перевыбора соты согласно некоторым вариантам осуществления.
Подробное описание изобретения
[0048] Далее будут подробно описаны варианты осуществления, примеры которых проиллюстрированы на прилагаемых чертежах. Последующее описание относится к прилагаемым чертежам, причем одни и те же номера позиций на разных чертежах представляют одинаковые или подобные элементы, если не указано иное. Реализации, изложенные в последующем описании вариантов осуществления, не представляют всех реализаций, соответствующих данному изобретению. Напротив, они являются лишь примерами устройств и способов, соответствующих аспектам настоящего изобретения, изложенным в прилагаемой формуле изобретения.
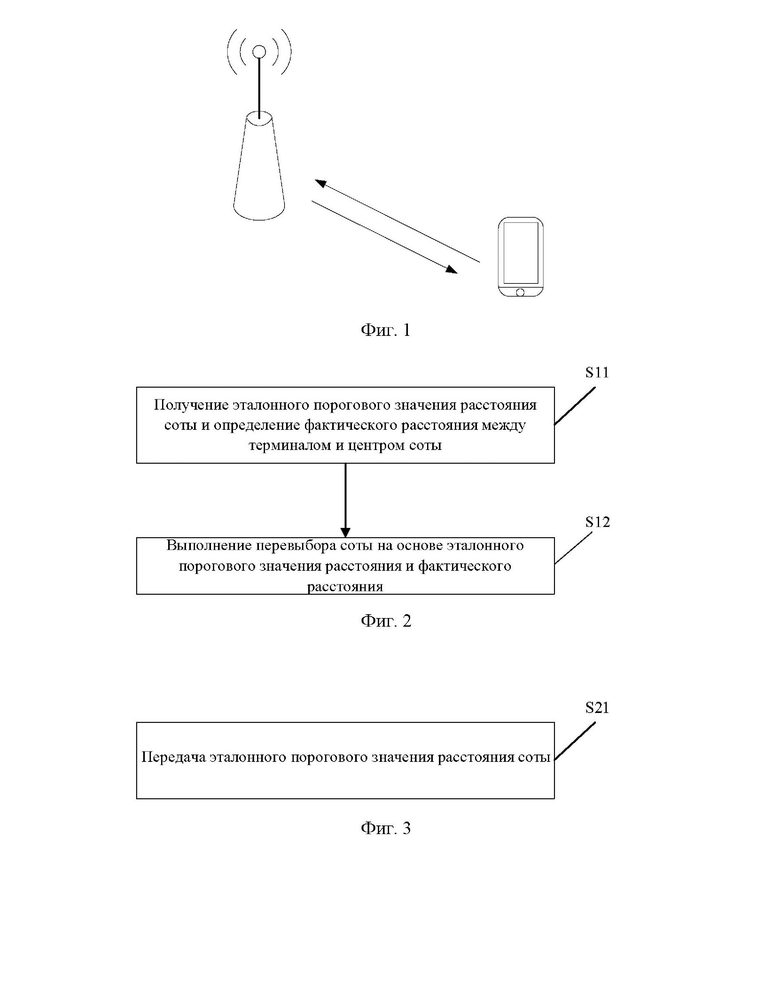
[0049] Способ передачи информации, предусмотренный в вариантах осуществления изобретения, может применяться в системе беспроводной связи, показанной на фиг. 1. Как показано на фиг. 1, система беспроводной связи включает терминал 10 и сетевое устройство 20. Информация передается и принимается между терминалом 10 и сетевым устройством 20 посредством беспроводных ресурсов.
[0050] Понятно, что система беспроводной связи на фиг. 1 представлена только для схематической иллюстрации. Система беспроводной связи может содержать также другие сетевые устройства, такие как устройство базовой сети, беспроводное ретрансляционное устройство и беспроводное устройство транспортной сети, которые не показаны на фиг. 1. Варианты осуществления изобретения не ограничивают количество сетевых устройств и количество терминалов, включенных в систему беспроводной связи.
[0051] Кроме того, понятно, что система беспроводной связи в вариантах осуществления изобретения представляет собой сеть, которая обеспечивает функции беспроводной связи. В системе беспроводной связи могут использоваться различные технологии связи, такие как множественный доступ с кодовым разделением каналов (CDMA, Code Division Multiple Access), широкополосный множественный доступ с кодовым разделением каналов (WCDMA, Wideband Code Division Multiple Access), множественный доступ с временным разделением каналов (TDMA, Time Division Multiple Access), множественный доступ с частотным разделением каналов (FDMA, Frequency Division Multiple Access), множественный доступ с ортогональным частотным разделением каналов (OFDMA, Orthogonal Frequency-Division Multiple Access), FDMA с одной несущей (SC-FDMA, Single Carrier FDMA) или множественный доступ с контролем несущей и предотвращением коллизий. В зависимости от пропускной способности сети, скоростей, задержек и других факторов сеть можно отнести к сети второго поколения (2G, 2-th Generation), сети третьего поколения (3G, 3-rd Generation), сети четвертого поколения (G4, 4-th Generation) или сети будущего развития, например сети 5G. Сеть 5G также может называться "новое радио" (NR, New Radio). Для удобства описания сеть беспроводной связи иногда для краткости упоминается в этом описании как сеть.
[0052] Кроме того, сетевое устройство, задействованное в описании, также может упоминаться как сетевое устройство беспроводного доступа. Сетевое устройство беспроводного доступа может быть базовой станцией, усовершенствованной базовой станцией (evolved node В), домашней базовой станцией, точкой доступа (АР, Access Point) в системе Wi-Fi, беспроводным ретрансляционным узлом, беспроводным узлом транспортной сети, точкой передачи (TP, Transmission Point), точкой передачи и приема (TRP, Transmission and Reception Point), базовой станцией следующего поколения (gNB, Next Generation Node В) в системе NR или компонентом или частью устройства, составляющего базовую станцию. Когда речь идет о системе связи транспортного средства со всеми объектами (V2X, Vehicle-to-Everything), сетевое устройство также может быть устройством, установленным на транспортном средстве. В вариантах осуществления изобретения конкретная технология и конкретная форма устройства, используемые сетевым устройством, не ограничены.
[0053] Кроме того, терминал, задействованный в описании, может также упоминаться как оконечное устройство, пользовательское оборудование (UE, User Equipment), мобильная станция (MS, Mobile Station), мобильный терминал (МТ, Mobile Terminal) и т.п., и представляет собой устройство, обеспечивающее связь для передачи голоса и/или данных для пользователя. Например, терминал может быть переносным устройством, устройством, установленным на транспортном средстве, и т.п.с функцией беспроводного соединения. В настоящее время некоторыми примерами терминалов являются смартфоны, карманные персональные компьютеры (РРС, Pocket Personal Computer), портативные компьютеры, персональные цифровые помощники (PDA, Personal Digital Assistant), ноутбуки, планшетные компьютеры, носимые устройства, устройства, установленные на транспортном средстве, и т.п. Кроме того, когда речь идет о системе связи транспортного средства с транспортным средством (V2X), оконечное устройство также может быть устройством, установленным на транспортном средстве. Варианты осуществления изобретения не ограничивают конкретную технологию и конкретную форму устройства, используемую терминалом.
[0054] Выбор или перевыбор соты выполняется во время осуществления связи между терминалом и сетевым устройством. Варианты осуществления изобретения применимы к процессу выбора или перевыбора соты. В данной области техники критерий S и критерий R используются для выбора или перевыбора соты.
[0055] Критерий S относится к Srxlev>0 и Squal>0, где Srxlev представляет собой значение уровня приема (Rx) при выборе соты, a Squal представляет собой значение качества при выборе соты. Сота, выбранная или перевыбранная терминалом, должна удовлетворять критерию S.
[0056] Кроме того, для внутричастотных измерений терминала, если обслуживающая сота удовлетворяет условиям Srxlev>SIntraSearchP и Squal>SIntraSearchQ, терминал может решить не выполнять измерения во внутричастотных соседних сотах. ShitraSearchP пороговое значение мощности принимаемого опорного сигнала (RSRP, reference signal received power) для внутричастотных измерений (также известное как пороговое значение уровня приема при выборе соты для внутричастотных измерений), a SmtraSearchQ - пороговое значение качества принимаемого опорного сигнала (RSRQ, reference signal received quality) для внутричастотных измерений (также известное как пороговое значение качества при выборе соты для внутричастотных измерений).
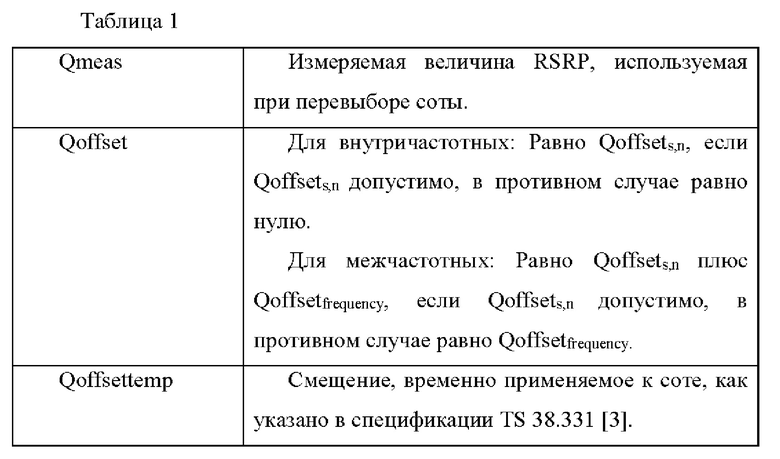
[0057] Критерий R относится к следующему: Rs=Qmeas,s + Qhyst-Qoffsettemp, Rn=Qmeas,n - Qoffset - Qoffsettemp, где Rs - значение R обслуживающей соты, Rn -значение R соседней соты, Qmeas,s значение измерения RSRP обслуживающей соты, Qmeas,n значение измерения RSRP соседней соты, Qhyst значение гистерезиса перевыбора соты, Qoffsettemp - значение временного смещения, a Qoffset - значение смещения. Соглашение в отношении Qmeas, Qoffset и Qoffsettemp показано в Таблице 1 ниже.
[0058] Описанный выше способ перевыбора соты на основе критерия S и критерия R применим в наземной сети. С развитием технологий связи внедряется сеть NTN. Сетевой характеристикой сети NTN является больший радиус соты. Для сети NTN с большим радиусом соты разница в RSRP или RSRQ при нахождении терминала в центре или на краю соты невелика, а поскольку радиус соты больше, область перекрытия сот относительно велика. Следовательно, при перемещении терминала и затухании канала (например, из-за препятствия) перевыбор соты на основе критерия S и критерия R может привести к тому, что терминал будет выполнять перевыбор соты между двумя сотами «туда-обратно», и, если перевыбор соты выполняется на основе критерия S и критерия R, сложно сконфигурировать разумные параметры перевыбора соты.
[0059] Следовательно, для сети NTN из-за ее сетевой характеристики способ перевыбора соты на основе критерия S и критерия R не может хорошо решить проблемы, с которыми сталкивается терминал во время выбора/перевыбора соты в сети NTN.
[0060] Ввиду этого, варианты осуществления изобретения предлагают способ перевыбора соты. Сетевое устройство предоставляет терминалу эталонную информацию о местоположении соты, сконфигурированную для определения эталонного порогового значения расстояния соты. Эталонное пороговое значение расстояния указывает расстояние, на котором сота может предоставлять хорошие сетевые услуги. Когда фактическое расстояние между терминалом и центром соты меньше эталонного порогового значения расстояния, сота может предоставлять терминалу хорошие сетевые услуги. Под хорошими сетевыми услугами, предоставляемыми сотой, может пониматься качество сигнала соты выше заданного порогового значения качества сигнала. Эталонное пороговое значение расстояния, предоставляемое сетью, обычно меньше фактического расстояния покрытия соты, при этом фактическое расстояние покрытия соты характеризуется радиусом соты. Когда терминал выполняет перевыбор соты, он выполняет перевыбор соты на основе эталонного порогового значения расстояния соты и фактического расстояния между терминалом и центром соты. Он может использовать в сочетании условия расстояния между терминалом и сотой для выполнения перевыбора соты, применимого к перевыбору соты в сети NTN с большим радиусом соты.
[0061] Фиг. 2 представляет собой блок-схему, иллюстрирующую способ перевыбора соты согласно некоторым вариантам осуществления. Как показано на фиг. 2, включены следующие этапы. Способ перевыбора соты, показанный на фиг. 2, может применяться в терминале. Конечно, он также может применяться в других устройствах, которые могут выполнять следующие соответствующие способы.
[0062] На этапе S11 получают эталонное пороговое значение расстояния соты и определяют фактическое расстояние между терминалом и центром соты.
[0063] В некоторых вариантах осуществления изобретения сота, соответствующая эталонному пороговому значению расстояния и фактическому расстоянию, может быть обслуживающей сотой терминала или соседней сотой терминала, которая также может пониматься как сота-кандидат, включенная в список кандидатов для перевыбора соты.
[0064] Эталонное пороговое значение расстояния может быть определено на основе эталонной информации о местоположении соты, предоставленной сетью NTN терминалу. Эталонная информация о местоположении соты может быть определена сетевым устройством посредством системного широковещательного сообщения. В некоторых вариантах осуществления изобретения эталонная информация о местоположении соты в основном используется для определения эталонного порогового значения расстояния соты. Эталонная информация о местоположении соты и эталонное пороговое значение расстояния соты иногда используются взаимозаменяемо, но специалисты в данной области техники должны понимать их смысл.
[0065] На этапе S12 выполняют перевыбор соты на основе эталонного порогового значения расстояния и фактического расстояния.
[0066] В некоторых вариантах осуществления изобретения терминал выполняет перевыбор соты на основе эталонного порогового значения расстояния соты и фактического расстояния между терминалом и центром соты, чтобы использовать в сочетании условия расстояния между терминалом и сотой для выполнения перевыбора соты, который подходит для перевыбора соты в сети NTN с большим радиусом соты.
[0067] Фиг. 3 представляет собой блок-схему способа перевыбора соты согласно некоторым вариантам осуществления. Как показано на фиг. 3, способ включает следующие этапы. Способ перевыбора соты на фиг. 3 может быть применяться в сетевом устройстве. Конечно, он также может быть применяться в других устройствах, которые могут выполнять следующие соответствующие способы.
[0068] На этапе S21 передают эталонное пороговое значение расстояния соты, при этом эталонное пороговое значение расстояния сконфигурировано для выполнения терминалом перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния между терминалом и центром соты.
[0069] Например, сетевое устройство предоставляет эталонное пороговое значение расстояния соты посредством системного широковещательного сообщения. Терминал получает эталонное пороговое значение расстояния соты на основе системного широковещательного сообщения обслуживающей соты и/или соседней соты.
[0070] В другом примере фактическое расстояние между терминалом и центром соты может быть определено терминалом на основе фактического местоположения терминала и фактической информации о местоположении соты или может быть определено сетевым устройством на основе фактического местоположения терминала и фактической информации о местоположении соты.
[0071] Когда терминал принимает решение на основе фактического местоположения терминала и фактической информации о местоположении соты, определяют информацию о местоположении терминала и получают эталонную информацию о местоположении соты, предоставляемой сетевым устройством. Эталонная информация о местоположении соты, предоставляемая сетевым устройством, может быть определена посредством эфемеридной информации (информации о местоположении сети соты), включенной в системное широковещательное сообщение. Сетевое устройство передает эталонную информацию о местоположении соты на терминал. Терминал получает эталонную информацию о местоположении соты и определяет фактическое расстояние между терминалом и центром соты на основе информации о местоположении терминала и эталонной информации о местоположении соты.
[0072] Когда сетевое устройство принимает решение на основе фактического местоположения терминала и фактической информации о местоположении соты, терминал определяет информацию о местоположении терминала и передает информацию о местоположении терминала на сетевое устройство. Информация о местоположении терминала, передаваемая терминалом сетевому устройству, может сообщаться на основе измерения терминала, такого как значение измерения, связанное с местоположением, сообщаемым терминалом. Сетевое устройство получает информацию о местоположении терминала и определяет фактическое расстояние между терминалом и центром соты на основе информации о местоположении терминала и эталонной информации о местоположении соты (эфемеридной информации). Когда сетевое устройство получает информацию о местоположении терминала, информация о местоположении терминала может быть определена на основе отчета об измерениях терминала. Например, сетевое устройство вычисляет информацию о местоположении терминала на основе значения измерения, связанного с местоположением и сообщенного терминалом. После определения фактического расстояния между терминалом и центром соты сетевое устройство передает определенное фактическое расстояние между терминалом и центром соты на терминал. Терминал получает фактическое расстояние между терминалом и центром соты, определенное сетевым устройством на основе информации о местоположении терминала и эталонной информации о местоположении соты, чтобы определить фактическое расстояние между терминалом и центром соты.
[0073] Используемый в некоторых вариантах осуществления изобретения способ перевыбора соты будет описан ниже в сочетании с практическими применениями.
[0074] Для удобства описания в некоторых вариантах осуществления изобретения Dref используется для представления эталонного порогового значения расстояния соты, a Dmeasure используется для представления фактического расстояния между терминалом и центром соты.
[0075] В некоторых вариантах осуществления изобретения, когда перевыбор соты выполняют на основе двух параметров Dref и Dmeasure, условие измерения, при котором терминал не начинает измерения во внутричастотных соседних сотах, может быть определено на основе Dref и Dmeasure. Например, после определения Dref обслуживающей соты и Dmeasure между терминалом и центром обслуживающей соты терминал может решить не измерять внутричастотные соседние соты, когда Srxlev>ShitraSearchP, Squal>SIntraSearchQ и Dref>Dmeasure. То есть в ответ на то, что обслуживающая сота терминала удовлетворяет условиям Srxlev>ShitraSearchP, Squal>SIntraSearchQ и Dref>Dmeasure, терминал может решить не измерять внутричастотные соседние соты.
[0076] В некоторых вариантах осуществления изобретения, когда перевыбор соты выполняют на основе двух параметров Dref и Dmeasure, условия, которым должна удовлетворять сота, полученная путем выполнения перевыбора соты, могут быть определены на основе Dref и Dmeasure. В примере сота, полученная путем выполнения перевыбора соты на основе Dref и Dmeasure, удовлетворяет условию Dref>Dmeasure. Кроме того, в некоторых вариантах осуществления изобретения сота, полученная путем выполнения перевыбора соты, должна удовлетворять критерию S. То есть сота, полученная путем выполнения перевыбора соты на основе Dref и Dmeasure, должна удовлетворять условиям Srxlev>0, Squal>0 и Dref>Dmeasure.
[0077] В некоторых вариантах осуществления настоящего изобретения сота для перевыбора соты на основе Dref и Dmeasure может пониматься как сота-кандидат в списке кандидатов для перевыбора соты на основе критерия S. Сота-кандидат может представлять собой обслуживающую соту терминала или соседнюю соту терминала. Целевую соту, полученную путем выполнения перевыбора соты на основе Dref и Dmeasure, можно понимать как одну из сот, удовлетворяющих критерию S.
[0078] Кроме того, понятно, что в некоторых вариантах осуществления изобретения критерий, используемый при перевыборе соты, которая удовлетворяет условиям Srxlev>0, Squal>0 и Dref>Dmeasure, может быть вновь определенным критерием S. Вновь определенный критерий S может быть следующим: Srxlev>0, Squal>0 и D>0, где D=Dref-Dmeasure. Dmeasure это расстояние между терминалом и центром целевой соты, Dref эталонное пороговое значение расстояния целевой соты, Srxlex - значение уровня приема при выборе соты для целевой соты, a Squal - значение качества при выборе соты для целевой соты. Следует понимать, что сота, полученная путем выполнения перевыбора соты на основе Dref и Dmeasure, в некоторых вариантах осуществления изобретения должна удовлетворять вышеуказанному вновь определенному критерию S.
[0079] Кроме того, можно понять, что сота, полученная путем выполнения перевыбора соты на основе Dref и Dmeasure в некоторых вариантах осуществления изобретения, может быть обслуживающей сотой до того, как терминал выполнит перевыбор соты, или может быть соседней сотой терминала.
[0080] В варианте реализации, в некоторых вариантах осуществления изобретения, Dref и Dmeasure могут использоваться в сочетании для выполнения перевыбора соты после выполнения перевыбора соты на основе существующих критериев S и R.
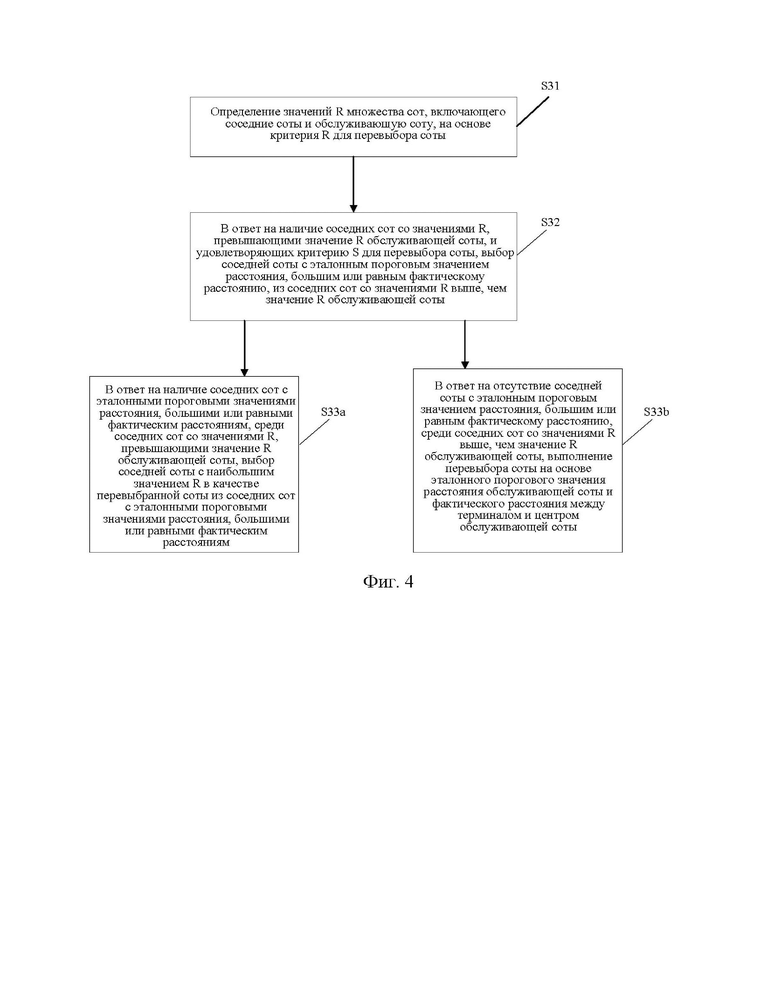
[0081] На фиг. 4 показана блок-схема способа перевыбора соты на основе эталонного порогового значения расстояния соты и фактического расстояния между терминалом и центром соты, согласно некоторым вариантам осуществления настоящего изобретения. Как показано на фиг. 4, включены следующие этапы.
[0082] На этапе S31 терминал определяет значения R множества сот, включающего соседние соты и обслуживающую соту, на основе критерия R для перевыбора соты.
[0083] На этапе S32, в ответ на наличие соседних сот со значениями R, превышающими значение R обслуживающей соты, и удовлетворяющих критерию S для перевыбора соты, соседнюю соту, для которой Dref≥Dmeasure, выбирают из соседних сот со значениями R выше, чем значение R обслуживающей соты.
[0084] Когда имеются соседние соты со значениями R выше, чем значение R обслуживающей соты, то есть определенное значение R соседней соты выше, чем значение R обслуживающей соты, и эти соседние соты удовлетворяют критерию S для перевыбора соты, терминалу необходимо использовать в сочетании Dref и Dmeasure, чтобы определить, следует ли перевыбирать соседнюю соту. Например, терминал выбирает соседнюю соту с Dref≥Dmeasure из соседних сот со значениями R выше, чем значение R обслуживающей соты.
[0085] Когда терминал выбирает соседнюю соту с Dref≥Dmeasure из соседних сот со значениями R выше, чем значение R обслуживающей соты, он может определить, следует ли выбирать соседнюю соту в качестве перевыбранной соты, на основе того, имеется ли соседняя сота с Dref≥Dmeasure среди соседних сот со значениями R выше, чем значение R обслуживающей соты.
[0086] На этапе S33a, в ответ на наличие соседних сот с Dref≥Dmeasure среди соседних сот со значениями R выше, чем значение R обслуживающей соты, выбирают соседнюю соту с наибольшим значением R среди соседних сот с Dref≥Dmeasure в качестве перевыбранной соты.
[0087] На этапе S33b, в ответ на отсутствие соседней соты с Dref≥Dmeasure среди соседних сот со значениями R выше, чем значение R обслуживающей соты, выполняют перевыбор соты на основе эталонного порогового значения расстояния обслуживающей соты и фактического расстояния между терминалом и центром обслуживающей соты.
[0088] В примере, при выполнении перевыбора соты на основе Dref и Dmeasure обслуживающей соты, в ответ на то, что Dref≥Dmeasure для обслуживающей соты, терминал остается в обслуживающей соте. В ответ на то, что Dref≤Dmeasure для обслуживающей соты, выбирают соседнюю соту с наибольшим значением R среди соседних сот со значением R выше, чем значение R обслуживающей соты, в качестве перевыбранной соты.
[0089] В некоторых вариантах осуществления терминал сортирует значения R множества сот на основе критерия R. Если значения R для N соседних сот выше, чем значение R обслуживающей соты, из N соседних сот выбирают Р сот, удовлетворяющих условию Dref≥Dmeasure. Затем из Р сот выбирают соту с наибольшим значением R. Если Р>0, терминал перевыбирает выбранную соту с наибольшим значением R. Если Р=0 (то есть ни одна соседняя сота не удовлетворяет условию Dref>≥Dmeasure в этом случае), и, если обслуживающая сота удовлетворяет условию Dref≥Dmeasure, терминал продолжает находиться в обслуживающей соте и не выполняет перевыбор соты. Если обслуживающая сота не удовлетворяет условию Dref≥Dmeasure (Dref<Dmeasure), терминал перевыбирает соту с наибольшим значением R среди N сот.
[0090] В некоторых вариантах осуществления изобретения описанный выше способ перевыбора соты может использоваться для перевыбора соседней соты, когда значение R соседней соты больше, чем значение R обслуживающей соты, и эталонное пороговое значение расстояния соседней соты больше или равно фактическому расстоянию. Кроме того, в ответ на отсутствие соседней соты, удовлетворяющей условию расстояния между Dref и Dmeasure, если обслуживающая сота удовлетворяет условию расстояния, терминал остается в обслуживающей соте. В ответ на отсутствие соседних сот, которые удовлетворяют условиям расстояния между Dref и Dmeasure, и обслуживающая сота не удовлетворяет условиям расстояния, он находится в соседней соте с более высоким значением R.
[0091] В другой возможной реализации терминал может выполнять перевыбор соты в соответствии с вновь определенным критерием S.
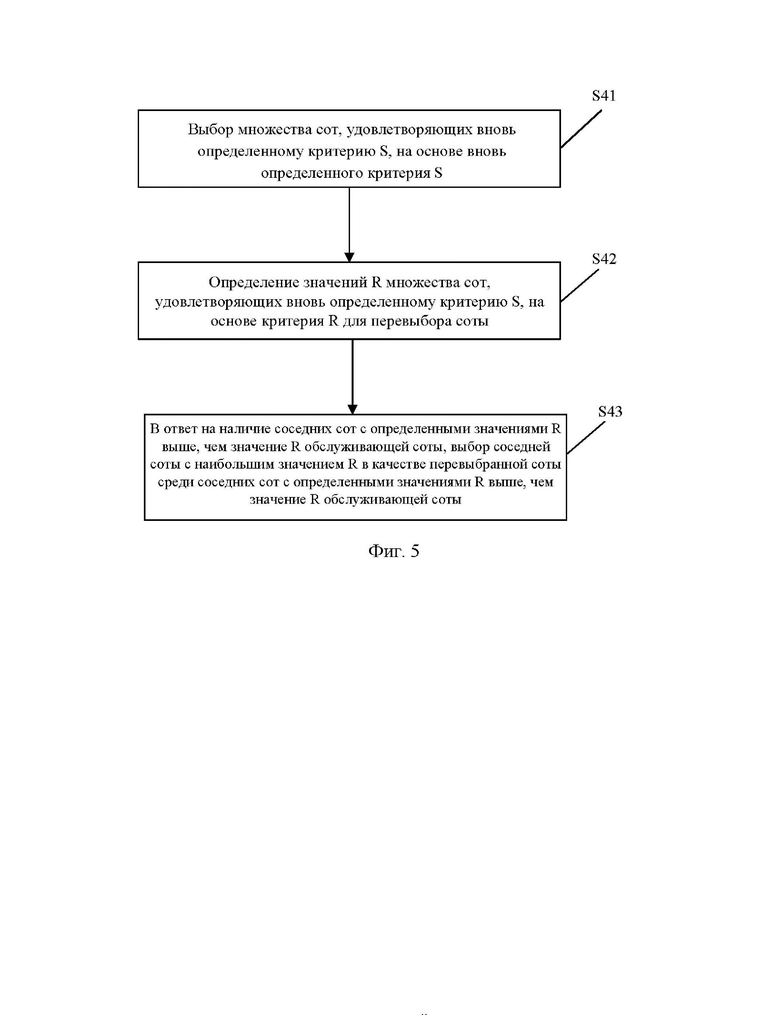
[0092] На фиг. 5 показана блок-схема способа перевыбора соты на основе эталонного порогового значения расстояния соты и фактического расстояния между терминалом и центром соты, согласно некоторым вариантам осуществления настоящего изобретения. Как показано на фиг. 5, включены следующие этапы.
[0093] На этапе S41 терминал выбирает множество сот, удовлетворяющих вновь определенному критерию S, на основе вновь определенного критерия S (Srxlev>0 и Squal>0 и D>0).
[0094] На этапе S42 значения R множества сот, удовлетворяющих вновь определенному критерию S, определяют на основе критерия R для перевыбора соты.
[0095] На этапе S43, в ответ на наличие соседних сот с определенными значениями R выше, чем значение R обслуживающей соты, соседнюю соту с наибольшим значением R выбирают в качестве перевыбранной соты среди соседних сот с определенными значениями R выше, чем значение R обслуживающей соты.
[0096] В некоторых вариантах осуществления настоящего изобретения, когда терминал выполняет перевыбор соты на основе Dref и Dmeasure, Dref и Dmeasure применяют к измерениям соседних сот, критерию S и критерию R. Это может быть применимо для перевыбора соты в сети NTN с большим радиусом соты. Выбор соты, удовлетворяющей условию Dref>Dmeasure, может предотвратить выполнение терминалом перевыбора соты между двумя сотами «туда-обратно».
[0097] Способ перевыбора соты, предусмотренный в некоторых вариантах осуществления настоящего изобретения, также применим к процессу взаимодействия между терминалом и сетевым устройством. В примере сетевое устройство определяет Dref посредством системного широковещательного сообщения. Терминал получает Dref каждой соты из системных широковещательных сообщений обслуживающей соты и/или соседней соты и получает эфемеридную информацию (эталонную информацию о местоположении соты) из системных широковещательных сообщений. Терминал определяет свое местоположение, например, определяет свое собственное местоположение на основе данных глобальной системы определения местоположения (GPS, Global Positioning System), и определяет Dmeasure между ним и центром соты в сочетании с эфемеридной информацией, полученной от сетевого устройства. Когда терминал выполняет выбор или перевыбор соты, он выбирает множество сот, которые удовлетворяют вновь определенному критерию S, используемому в приведенной выше схеме, и применяет критерий R к выбранным сотам. Терминал перевыбирает соту с наибольшим значением R. Если сота с наибольшим значением R является текущей обслуживающей сотой, терминал не выполняет перевыбор соты и продолжает оставаться в текущей соте. Альтернативно, когда терминал выполняет выбор или перевыбор соты, он выбирает множество сот, удовлетворяющих существующему критерию S, применяет критерий R к выбранным сотам, а затем использует в сочетании Dref и Dmeasure для выполнения перевыбора соты.
[0098] В некоторых вариантах осуществления изобретения для процесса взаимодействия между терминалом и сетевым устройством для реализации поискового вызова в нелицензированной полосе частот или в лицензированной полосе частот может быть сделана ссылка на соответствующее описание предшествующих вариантов осуществления, и подробности здесь снова не описываются.
[0099] Основываясь на той же концепции, некоторые варианты осуществления изобретения предлагают также устройство для перевыбора соты.
[00100] Понятно, что для реализации описанных выше функций устройство для перевыбора соты, предлагаемое в некоторых вариантах осуществления изобретения, содержит аппаратные структуры и/или программные модули для реализации различных функций. В сочетании с блоками и этапами алгоритма примеров, раскрытых в вариантах осуществления изобретения, варианты осуществления изобретения могут быть реализованы в виде аппаратных средств или комбинации аппаратных средств и компьютерного программного обеспечения. Выполняется ли определенная функция аппаратными средствами или аппаратными средствами, управляемыми компьютерным программным обеспечением, зависит от конкретного применения и условий проектных ограничений технического решения. Специалисты в данной области техники могут использовать разные способы для каждого конкретного применения для реализации описанных функций, и такую реализацию не следует рассматривать как выходящую за рамки технических решений вариантов осуществления изобретения.
[00101] Фиг. 6 представляет собой структурную схему устройства для перевыбора соты согласно некоторым вариантам осуществления. Как показано на фиг. 6, устройство 100 для перевыбора соты содержит блок 101 получения и блок 102 обработки. Блок 101 получения сконфигурирован для получения эталонного порогового значения расстояния соты и определения фактического расстояния между терминалом и центром соты. Блок 102 обработки сконфигурирован для выполнения перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния.
[00102] В реализации сота является обслуживающей сотой терминала, и блок 102 обработки также сконфигурирован так, чтобы: в ответ на то, что уровень приема при выборе соты превышает пороговое значение уровня приема при выборе соты для внутричастотных измерений, значение качества при выборе соты выше, чем пороговое значение качества при выборе соты для внутричастотных измерений, а эталонное пороговое значение расстояния обслуживающей соты больше, чем фактическое расстояние между терминалом и центром обслуживающей соты, не выполнять измерение для соседних внутричастотных сот. Это представлено условиями Srxlev>SmtraSearchP и Squal>SIntraSearchQ, где Srxlev - значение уровня приема при выборе соты, SIntraSearchP - пороговое значение уровня приема при выборе соты для внутричастотных измерений, Squal значение качества при выборе соты, а SIntraSearchQ пороговое значение качества при выборе соты для внутричастотных измерений.
[00103] В другом способе реализации целевая сота, полученная путем выполнения перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния, удовлетворяет следующим условиям: значение уровня приема при выборе соты для целевой соты больше 0, значение качества при выборе соты для целевой соты больше 0, и эталонное пороговое значение расстояния целевой соты больше, чем фактическое расстояние между терминалом и центром целевой соты.
[00104] В еще одном способе реализации блок 102 обработки сконфигурирован для выполнения перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния посредством: определения значений R множества сот на основе критерия R для перевыбора соты, при этом множество сот включает соседние соты и обслуживающую соту; в ответ на наличие соседних сот со значениями R выше, чем значение R обслуживающей соты, и удовлетворяющих критерию S для перевыбора соты, выбора соседней соты с эталонным пороговым значением расстояния, большим или равным фактическому расстоянию, из соседних сот со значениями R выше, чем значение R обслуживающей соты; в ответ на наличие соседних сот с эталонными пороговыми значениями расстояния, большими или равными фактическим расстояниям, среди соседних сот со значениями R выше, чем значение R обслуживающей соты, выбора соседней соты с наибольшим значением R среди соседних сот с эталонными пороговыми значениями расстояния, большими или равными фактическим расстояниям, в качестве перевыбранной соты; и, в ответ на отсутствие соседней соты с эталонным пороговым значением расстояния, большим или равным фактическому расстоянию, среди соседних сот со значениями R выше, чем значение R обслуживающей соты, выполнения перевыбора соты на основе эталонного порогового значения расстояния обслуживающей соты и фактического расстояния между терминалом и центром обслуживающей соты.
[00105] В другом способе реализации блок 102 обработки сконфигурирован для выполнения перевыбора соты на основе эталонного порогового значения расстояния обслуживающей соты и фактического расстояния между терминалом и центром обслуживающей соты посредством следующего: в ответ на то, что эталонное пороговое значение расстояния обслуживающей соты больше или равно фактическому расстоянию между терминалом и центром обслуживающей соты, нахождение в обслуживающей соте; и, в ответ на то, что эталонное пороговое значение расстояния обслуживающей соты меньше фактического расстояния между терминалом и центром обслуживающей соты, выбор соседней соты с наибольшим значением R среди соседних сот со значениями R выше, чем значение R обслуживающей соты, в качестве перевыбранной соты.
[00106] В другом способе реализации блок 102 обработки сконфигурирован для выполнения перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния посредством: выбора сот, которые удовлетворяют следующим условиям: значения уровня приема при выборе соты больше 0, значения качества при выборе соты больше 0, и эталонные пороговые значения расстояния больше фактических расстояний; определения значений R множества сот из выбранных сот на основе критерия R для перевыбора соты; и, в ответ на наличие соседних сот с определенными значениями R, превышающими значение R обслуживающей соты, выбора соседней соты с наибольшим значением R среди соседних сот с определенными значениями R, превышающими значение R обслуживающей соты, в качестве перевыбранной соты.
[00107] В еще одном способе реализации блок 101 получения сконфигурирован для определения фактического расстояния между терминалом и центром соты посредством: определения информации о местоположении терминала и получения эталонной информации о местоположении соты, предоставляемой сетевым устройством; и определения фактического расстояния между терминалом и центром соты на основе информации о местоположении терминала и эталонной информации о местоположении соты.
[00108] В еще одном способе реализации блок 101 получения сконфигурирован для определения фактического расстояния между терминалом и центром соты посредством: определения информации о местоположении терминала и передачи информации о местоположении на сетевое устройство; и получения фактического расстояния между терминалом и центром соты, определенного сетевым устройством на основе информации о местоположении терминала и эталонной информации о местоположении соты.
[00109] В еще одном способе реализации блок 101 получения сконфигурирован для получения эталонного порогового значения расстояния соты посредством получения эталонного порогового значения расстояния соты на основе системного широковещательного сообщения обслуживающей соты и/или соседней соты.
[00110] Фиг. 7 представляет собой структурную схему устройства для перевыбора соты согласно некоторым вариантам осуществления. Как показано на фиг. 7, устройство 200 для перевыбора соты содержит блок 201 передачи.
[00111] Блок 201 передачи сконфигурирован для передачи эталонного порогового значения расстояния соты, при этом эталонное пороговое значение расстояние сконфигурировано для выполнения терминалом перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния между терминалом и центром соты.
[00112] В возможной реализации блок 201 передачи также сконфигурирован для передачи эталонной информации о местоположении соты, при этом эталонная информация о местоположении соты сконфигурирована для определения терминалом фактического расстояния.
[00113] В другой возможной реализации устройство 200 также содержит: блок 203 получения, сконфигурированный для получения информации о местоположении терминала; и блок 202 обработки, сконфигурированный для определения фактического расстояния между терминалом и центром соты на основе информации о местоположении терминала и эталонной информации о местоположении соты, при этом блок передачи также сконфигурирован для передачи фактического расстояния на терминал.
[00114] В еще одной возможной реализации целевая сота, полученная путем выполнения терминалом перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния, удовлетворяет следующим условиям: значение уровня приема при выборе соты для целевой соты больше 0, значение качества при выборе соты для целевой соты больше 0, и эталонное пороговое значение расстояние целевой соты больше фактического расстояния между терминалом и центром целевой соты.
[00115] Что касается устройств в предыдущих вариантах осуществления, то конкретные способы выполнения операций для отдельных модулей в них были подробно описаны в вариантах осуществления, касающихся способов, и здесь подробно описываться не будут.
[00116] Фиг. 8 представляет собой структурную схему устройства 300 для перевыбора соты согласно некоторым вариантам осуществления. Например, устройство 300 может быть мобильным телефоном, компьютером, терминалом цифрового вещания, устройством обмена сообщениями, игровой консолью, планшетом, медицинским устройством, тренажером, персональным цифровым помощником и т.п.
[00117] Как показано на фиг. 8, устройство 300 может содержать один или более из следующих компонентов: компонент 302 обработки, память 304, компонент 306 питания, мультимедийный компонент 308, аудиокомпонент 310, интерфейс 312 ввода/вывода (I/O, Input/Output), компонент 314 датчиков и компонент 316 связи.
[00118] Компонент 302 обработки, как правило, управляет общими операциями устройства 300, такими как операции, связанные с отображением, телефонными вызовами, передачей данных, работой с камерой и операциями записи. Компонент 302 обработки может содержать один или более процессоров 320 для выполнения команд для осуществления всех или части этапов в вышеописанных способах. Кроме того, компонент 302 обработки может содержать один или более модулей, которые обеспечивают взаимодействие между компонентом 302 обработки и другими компонентами. Например, компонент 302 обработки может содержать мультимедийный модуль, обеспечивающий взаимодействие между мультимедийным компонентом 308 и компонентом 302 обработки.
[00119] Память 304 сконфигурирована для хранения различных типов данных для поддержки работы устройства 300. Примеры таких данных включают команды для любых приложений или способов, работающих на устройстве 300, контактные данные, данные телефонной книги, сообщения, изображения, видеоданные, и т.п. Память 304 может быть реализована с использованием любого типа энергозависимых или энергонезависимых запоминающих устройств любого типа или их комбинации, таких как статическая оперативная память (SRAM, Static Random Access Memory), электрически стираемая программируемая постоянная память (EEPROM, Electrically Erasable Programmable Read-Only Memory), стираемая программируемая постоянная память (EPROM, Erasable Programmable Read-Only Memory), программируемая постоянная память (PROM, Programmable Read-Only Memory), постоянная память (ROM, Read-Only Memory), магнитная память, флэш-память, магнитный или оптический диск.
[00120] Компонент 306 питания обеспечивает питание различных компонентов устройства 300. Компонент 306 питания может содержать систему управления питанием, один или более источников питания и любые другие компоненты, связанные с производством, управлением и распределением электрической энергии в устройстве 300.
[00121] Мультимедийный компонент 308 включает экран, обеспечивающий выходной интерфейс между устройством 300 и пользователем. В некоторых вариантах осуществления экран может представлять собой жидкокристаллический дисплей (LCD, Liquid Crystal Display) и сенсорную панель (TP, Touch Panel). Если экран включает сенсорную панель, экран может быть реализован как сенсорный экран для приема входных сигналов от пользователя. Сенсорная панель содержит один или более тактильных датчиков для распознавания прикосновений, скольжений и жестов на сенсорной панели. Тактильные датчики могут не только определять область прикосновения или скольжения, но также определять продолжительность и давление, связанные с операциями прикосновения или скольжения. В некоторых вариантах осуществления мультимедийный компонент 308 содержит фронтальную камеру и/или тыловую камеру. Фронтальная камера и/или тыловая камера могут принимать внешние мультимедийные данные при нахождении устройства 300 в рабочем режиме, таком как режим фотографирования или режим видеосъемки. Каждая из фронтальной и тыловой камер может оснащаться фиксированной системой оптических линз или иметь возможности оптической фокусировки и изменения масштаба изображения.
[00122] Аудиокомпонент 310 сконфигурирован для вывода и/или ввода звуковых сигналов. Например, аудиокомпонент 310 содержит микрофон (MIC), который сконфигурирован для приема внешнего звукового сигнала, когда устройство 300 находится в рабочем режиме, таком как режим выполнения вызова, режим записи и режим распознавания голоса. Принятый звуковой сигнал далее может сохраняться в памяти 304 или передаваться через компонент 316 связи. В некоторых вариантах осуществления аудиокомпонент 310 содержит динамик для вывода звуковых сигналов.
[00123] Интерфейс 312 ввода/вывода (I/O) обеспечивает интерфейс между компонентом 302 обработки и модулями периферийного интерфейса, такими как клавиатура, нажимное колесико мыши, кнопки и т.п.Эти кнопки могут включать, не ограничиваясь этим: кнопку "Домой", кнопку регулировки громкости, кнопку запуска и кнопку блокировки.
[00124] Компонент 314 датчиков содержит один или более датчиков для получения оценок различных аспектов работы устройства 300. Например, компонент 314 датчиков может обнаруживать открытое/закрытое состояние устройства 300, относительное расположение компонентов, например, дисплея и клавиатуры устройства 300, изменение положения устройства 300 или компонента устройства 300, наличие или отсутствие контакта пользователя с устройством 300, ориентацию или ускорение/замедление устройства 300 и изменение температуры устройства 300. Компонент 314 датчиков может также содержать датчик приближения, сконфигурированный для обнаружения присутствия близлежащих объектов без физического контакта с ними. Компонент 314 датчиков может также содержать оптический датчик, такой как датчик изображений на основе комплементарной структуры "метал-оксид-полупроводник" (CMOS, Complementary Metal Oxide Semiconductor) или на основе прибора с зарядовой связью (CCD, Charge Coupled Device), для использования в приложениях формирования изображений. В некоторых вариантах осуществления компонент 314 датчиков может также содержать датчик ускорения, гиродатчик, магнитный датчик, датчик давления или датчик температуры.
[00125] Компонент 316 связи сконфигурирован для обеспечения проводной или беспроводной связи между устройством 300 и другими устройствами. Устройство 300 может осуществлять доступ к беспроводной сети на основе таких стандартов связи, как WiFi, 2G, или 3G, или их комбинации. В одном варианте осуществления компонент 316 связи принимает широковещательный сигнал или информацию, связанную с широковещательной передачей, от внешней системы управления широковещательной передачей через широковещательный канал. В одном варианте осуществления компонент 316 связи также содержит модуль беспроводной связи ближнего радиуса действия (NFC, Near Field Communication) для связи на малых расстояниях. Например, модуль NFC может быть реализован на основе технологии радиочастотной идентификации (RFID, Radio Frequency Identification), технологии, разработанной ассоциацией по средствам передачи данных в инфракрасном диапазоне (IrDA, Infrared Data Association), технологии сверхширокополосной (UWB, Ultra-Wideband) связи, технологии Bluetooth (ВТ) и других технологий.
[00126] В вариантах осуществления устройство 300 может быть реализовано с использованием одной или более специализированных интегральных схем (ASIC, Application Specific Integrated Circuit), цифровых процессоров сигналов (DSP, Digital Signal Processor), устройств цифровой обработки сигналов (DSPD, Digital Signal Processing Device), программируемых логических устройств (PLD, Programmable Logic Device), программируемых пользователем вентильных матриц (FPGA, Field Programmable Gate Array), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, предназначенных для выполнения описанных выше способов.
[00127] В вариантах осуществления предлагается также машиночитаемый носитель для хранения данных, содержащий команды, такие как включенные в память 304 и исполняемые процессором 320 в устройстве 300, для выполнения описанных выше способов. Например, машиночитаемый носитель для хранения данных может представлять собой постоянную память (ROM), оперативную память (RAM), компакт-диск, предназначенный только для чтения (CD-ROM, Compact Disk Read Only Memory), магнитную ленту, гибкий диск, оптическое устройство хранения данных и т.п.
[00128] Фиг. 9 представляет собой структурную схему, иллюстрирующую устройство 400 для перевыбора соты согласно некоторым вариантам осуществления. Например, устройство 400 может быть предусмотрено как сетевое устройство, такое как базовая станция и т.п. Как показано на фиг. 9, устройство 400 содержит компонент 422 обработки, который содержит один или более процессоров, и ресурс памяти, представленный памятью 432, для хранения команд, исполняемых компонентом 422 обработки, таких как прикладные программы. Прикладная программа, хранящаяся в памяти 432, может содержать один или более модулей, каждый из которых соответствует набору команд. Кроме того, компонент 422 обработки сконфигурирован для выполнения команд для осуществления описанных выше способов.
[00129] Устройство 400 может также включать компонент 426 питания, сконфигурированный для управления питанием устройства 400, проводной или беспроводной сетевой интерфейс 450, сконфигурированный для подключения устройства 400 к сети, и интерфейс 458 ввода/вывода. Устройство 400 может работать на основе операционной системы, хранящейся в памяти 432, такой как Windows Server™, Mac OS X™, Unix™, Linux™, FreeBSD™ и т.п.
[00130] В некоторых вариантах осуществления также предусматривается машиночитаемый носитель для хранения данных, содержащий команды, например память 432, содержащая команды, которые могут выполняться компонентом 422 обработки устройства 400 для выполнения описанных выше способов. Например, машиночитаемый носитель для хранения данных может быть ROM, RAM, CD-ROM, магнитной лентой, гибким диском, оптическим устройством хранения данных и т.п.
[00131] Следует понимать, что слово "множество", упомянутое в описании, может относиться к двум или более объектам, и другие количественные показатели аналогичны. Сочетание "и/или" может описывать отношения связи соответствующих объектов, указывая на то, что могут быть три типа отношений, например, «А и/или В» может означать: А существует отдельно, А и В существуют одновременно, и В существует отдельно. Символ "/" обычно указывает на то, что связанные объекты до и после этого символа находятся в отношении "или". Кроме того, понятно, что в описании формы единственного числа предназначены также для включения форм множественного числа, если контекст явно не указывает на другие значения.
[00132] Следует понимать, что, хотя термины "первый", "второй" и т.п. могут использоваться для описания различной информации, такая информация не должна ограничиваться этими терминами. Эти термины используются только для различения информации одного и того же типа и не указывают на определенный порядок или степень важности. Фактически, такие выражения, как первый и второй, могут использоваться взаимозаменяемо. Например, в пределах сущности изобретения, первая информация может быть также названа второй информацией, и аналогично вторая информация может быть также названа первой информацией.
[00133] Кроме того, понятно, что, если не указано иное, термин "связанный" включает прямую связь между двумя компонентами без других компонентов, а также включает косвенную связь между двумя компонентами с другими элементами.
[00134] Кроме того, понятно, что, хотя операции в вариантах осуществления изобретения показаны в конкретном порядке на чертежах, это не следует понимать как требование выполнения этих операций в показанном конкретном порядке или в последовательном порядке, или как требование выполнения всех показанных операций для получения желаемого результата. В определенных обстоятельствах могут быть выгодны многозадачность и параллельная обработка.
[00135] Другие варианты осуществления изобретения будут очевидны специалистам в данной области техники из рассмотрения описания и применения раскрытого здесь изобретения. Настоящая заявка предназначена для охвата любых изменений, вариантов использования или адаптаций изобретения в соответствии с его общими принципами, включая такие отступления от описания, которые входят в известную или обычную практику в данной области техники. Описание и примеры следует рассматривать только как иллюстративные, а сущность изобретения определяется следующей формулой изобретения.
[00136] Следует понимать, что настоящее изобретение не ограничивается точной структурой, которая была описана выше и проиллюстрирована на прилагаемых чертежах, и что могут быть сделаны различные модификации и изменения в пределах сущности изобретения. Предполагается, что объем изобретения ограничивается только прилагаемой формулой изобретения.
Изобретение относится к области технологий связи и, в частности, к способу и устройству для перевыбора соты, а также к носителю данных. Технический результат заключается в возможности выполнения перевыбора соты в сочетании с условиями расстояния между терминалом и сотой в сети NTN с большим радиусом соты. Способ перевыбора соты включает получение эталонного порогового значения расстояния соты и определение фактического расстояния между терминалом и центром соты, и выполнение перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния. Пороговое значение расстояния представляет собой расстояние до опорного местоположения соты. 8 н. и 12 з.п. ф-лы, 9 ил.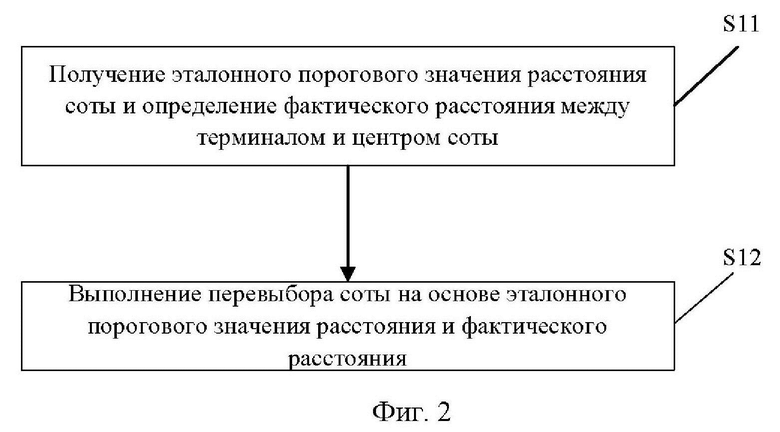
1. Способ перевыбора соты, выполняемый терминалом и включающий:
получение эталонного порогового значения расстояния соты и определение фактического расстояния между терминалом и центром соты, при этом эталонное пороговое значение расстояния представляет собой расстояние до опорного местоположения соты; и
выполнение перевыбора соты на основе эталонного порогового значения
расстояния и фактического расстояния.
2. Способ по п. 1, в котором сота является обслуживающей сотой терминала, и, в ответ на то, что значение уровня приема при выборе соты больше, чем пороговое значение уровня приема при выборе соты для внутричастотных измерений, значение качества при выборе соты больше, чем пороговое значение качества при выборе соты для внутричастотных измерений, и эталонное пороговое значение расстояния обслуживающей соты больше, чем фактическое расстояние между терминалом и центром обслуживающей соты, не выполняют измерение для внутричастотных соседних сот.
3. Способ по п. 1, в котором целевая сота, полученная путем выполнения перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния, удовлетворяет следующим условиям: значение уровня приема при выборе соты для целевой соты больше 0, значение качества при выборе соты для целевой соты больше 0, и эталонное пороговое значение расстояния целевой соты больше фактического расстояния между терминалом и центром целевой соты.
4. Способ по п. 1 или 3, в котором выполнение перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния включает:
определение (S31) значений R множества сот на основе критерия R для перевыбора соты, при этом множество сот включает соседние соты и обслуживающую соту;
в ответ на наличие соседних сот со значениями R выше, чем значение R
обслуживающей соты, и удовлетворяющих критерию S для перевыбора соты, выбор соседней соты с эталонным пороговым значением расстояния, большим или равным фактическому расстоянию, из соседних сот со значениями R выше, чем значение R обслуживающей соты;
в ответ на наличие соседних сот с эталонными пороговыми значениями расстояния, большими или равными фактическим расстояниям, среди соседних сот со значениями R выше, чем значение R обслуживающей соты, выбор соседней соты с наибольшим значением R среди соседних сот с эталонными пороговыми значениями расстояния, большими или равными фактическим расстояниям, в качестве перевыбранной соты; и,
в ответ на отсутствие соседней соты с эталонным пороговым значением
расстояния, большим или равным фактическому расстоянию, среди соседних сот со значениями R выше, чем значение R обслуживающей соты, выполнение перевыбора соты на основе эталонного порогового значения расстояния обслуживающей соты и фактического расстояния между терминалом и центром обслуживающей соты.
5. Способ по п. 4, в котором выполнение перевыбора соты на основе эталонного порогового значения расстояния обслуживающей соты и фактического расстояния между терминалом и центром обслуживающей соты включает:
в ответ на то, что эталонное пороговое значение расстояния обслуживающей соты больше или равно фактическому расстоянию между терминалом и центром обслуживающей соты, нахождение в обслуживающей соте; и,
в ответ на то, что эталонное пороговое значение расстояния обслуживающей соты меньше, чем фактическое расстояние между терминалом и центром обслуживающей соты, выбор соседней соты с наибольшим значением R среди соседних сот со значениями R выше, чем значение R обслуживающей соты, в качестве перевыбранной соты.
6. Способ по п. 1 или 3, в котором выполнение перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния включает:
выбор сот, которые удовлетворяют следующим условиям: значения уровня приема при выборе соты больше 0, значения качества при выборе соты больше 0, и эталонные пороговые значения расстояния превышают фактические расстояния;
определение значений R множества сот из выбранных сот на основе критерия R для перевыбора соты; и,
в ответ на наличие соседних сот с определенными значениями R, превышающими значение R обслуживающей соты, выбор соседней соты с наибольшим значением R среди соседних сот с определенными значениями R, превышающими значение R обслуживающей соты, в качестве перевыбранной соты.
7. Способ по любому из пп. 1-6, в котором определение фактического
расстояния между терминалом и центром соты включает:
определение информации о местоположении терминала и получение эталонной информации о местоположении соты, предоставляемой сетевым устройством; и
определение фактического расстояния между терминалом и центром соты на основе информации о местоположении терминала и эталонной информации о местоположении соты.
8. Способ по любому из пп. 1-7, в котором определение фактического расстояния между терминалом и центром соты включает:
определение информации о местоположении терминала и передачу информации о местоположении на сетевое устройство; и
получение фактического расстояния между терминалом и центром соты, определенного сетевым устройством на основе информации о местоположении терминала и эталонной информации о местоположении соты.
9. Способ по любому из пп. 1-8, в котором получение эталонного порогового значения расстояния соты включает:
получение эталонного порогового значения расстояния соты на основе широковещательного системного сообщения обслуживающей соты и/или соседней соты.
10. Способ перевыбора соты, выполняемый сетевым устройством и включающий:
передачу эталонного порогового значения расстояния соты, при этом эталонное пороговое значение расстояния сконфигурировано для выполнения терминалом перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния между терминалом и центром соты, и эталонное пороговое значение расстояния представляет собой расстояние до опорного местоположения соты.
11. Способ по п. 10, также включающий:
передачу эталонной информации о местоположении соты, при этом эталонная информация о местоположении соты сконфигурирована для определения терминалом фактического расстояния.
12. Способ по п. 10, также включающий:
получение информации о местоположении терминала;
определение фактического расстояния между терминалом и центром соты на основе информации о местоположении терминала и эталонной информации о местоположении соты; и
передачу фактического расстояния на терминал.
13. Способ по любому из пп. 10-12, в котором целевая сота, полученная путем выполнения терминалом перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния, удовлетворяет следующим условиям: значение уровня приема при выборе соты для целевой соты больше 0, значение качества при выборе соты для целевой соты больше 0, и эталонное пороговое значение расстояния целевой соты больше фактического расстояния между терминалом и центром целевой соты.
14. Устройство для перевыбора соты, содержащее:
блок получения, сконфигурированный для получения эталонного порогового значения расстояния соты и определения фактического расстояния между терминалом и центром соты, при этом эталонное пороговое значение расстояния представляет собой расстояние до опорного местоположения соты; и
блок обработки, сконфигурированный для выполнения перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния.
15. Устройство по п. 14, в котором целевая сота, полученная путем выполнения перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния, удовлетворяет следующим условиям: значение уровня приема при выборе соты для целевой соты больше 0, значение качества при выборе соты для целевой соты больше 0, и эталонное пороговое значение расстояния целевой соты больше фактического расстояния между терминалом и центром целевой соты.
16. Устройство для перевыбора соты, содержащее:
блок передачи, сконфигурированный для передачи эталонного порогового значения расстояния соты, при этом эталонное пороговое значение расстояния сконфигурировано для выполнения терминалом перевыбора соты на основе эталонного порогового значения расстояния и фактического расстояния между терминалом и центром соты, и эталонное пороговое значение расстояния представляет собой расстояние до опорного местоположения соты.
17. Устройство для перевыбора соты, содержащее:
процессор и
память для хранения команд, исполняемых процессором,
при этом процессор сконфигурирован для выполнения способа по любому из пп. 1-9.
18. Устройство для перевыбора соты, содержащее:
процессор и
память для хранения команд, исполняемых процессором,
при этом процессор сконфигурирован для выполнения способа по любому из пп. 10-13.
19. Машиночитаемый носитель для хранения данных, на котором хранятся команды, которые при выполнении процессором мобильного терминала заставляют мобильный терминал выполнять способ по любому из пп. 1-9.
20. Машиночитаемый носитель для хранения данных, на котором хранятся команды, которые при выполнении процессором сетевого устройства заставляют сетевое устройство выполнять способ по любому из пп. 10-13.
| CN 110972190 A, 07.04.2020 | |||
| СПОСОБ ВЫБОРА СОТЫ И МОБИЛЬНАЯ СТАНЦИЯ | 2010 |
|
RU2491774C2 |
| Транспортное средство | 1990 |
|
SU1791261A1 |
| CN 104219718 B, 23.02.2018 | |||
| US2008200187 A1, 21.08.2008 | |||
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ UE В СОТЕ | 2011 |
|
RU2566742C1 |
