Настоящее изобретение относится к области сохранения и укрепления здоровья домашних животных, в частности к устройствам и способам для отслеживания общей активности домашних животных.
Известно техническое решение согласно заявке США US 2020068853 A1 (опубл. 05.03.2020) «NETWORK-BASED PET TRACKING AND REPORTING SYSTEM/СИСТЕМА СЛЕЖЕНИЯ ЗА ДОМАШНИМИ ЖИВОТНЫМИ И ПЕРЕДАЧИ ИНФОРМАЦИИ ПОСРЕДСТВОМ СЕТИ», в котором раскрыта реализация возможности предоставления владельцам домашних животных контроля активности своего питомца и стабильности питания на постоянной основе. Для этого используют устройство слежения, которое представляет собой электронный трекер активности, отслеживающий передвижение собаки или другого домашнего животного. Устройство слежения имеет водонепроницаемый корпус, на внешнюю поверхность которого нанесен графический логотип компании.
Устройство слежения может записывать шаги (ходьба или бег), пройденное расстояние, общее отслеживаемое время и другие действия, основанные на движении. Устройство слежения прикрепляется или иным образом интегрируется с ошейником. Возможна также модификация устройства для закрепления на любой одежде, которую носит собака, например, на жилете или ином похожем предмете одежды. Устройство слежения может быть снабжено средствами беспроводной связи, такими как Bluetooth, модуль идентификации абонента (SIM) или SIM-карта, модуль беспроводной связи (Wi-Fi), а также иметь дисплей, например, сенсорный дисплей, или аналогичное средство отображения данных. В качестве датчиков, конструктивно входящих в состав устройства, могут быть перечислены гироскоп, барометр, датчик температуры, датчик внешней освещенности, датчик частоты сердечных сокращений, датчик частоты дыхания и т.п. Питание устройства осуществляется посредством встроенной перезаряжаемой литий-ионной батареи. Дополнительными компонентами являются дистанционные устройства в виде акселерометров, закрепляемых на ногах домашнего животного, и передающих соответствующие данные на устройство слежения, в общем выполняющем роль «материнского» устройства, осуществляющего связь со смартфоном владельца.
В свою очередь, владелец домашнего животного посредством смартфона со специально установленным на нем приложением, осуществляет двустороннюю связь с одной стороны с упомянутым устройством слежения, с другой – с облачным сервисом.
Известны также технические решения по патентам RU 131203 U1 (опубл. 10.08.2013), US 6388612 B1 (опубл. 14.05.2002), в общем виде состоящие из трекера, содержащего средство его крепления на контролируемом объекте – браслет или аналогичное изделие.
Недостатками известных технических решений является низкий уровень контроля за состоянием животного определенного вида, в том числе, в случае возникновения опасности для здоровья животного. Кроме того, не проработано решение безопасного и удобного средства, позволяющего осуществить предложенный способ.
Достигаемый технический результат может быть выражен в повышении уровня дистанционного контроля и расширении арсенала средств контроля местоположения, мониторинга состояния и других параметров домашних животных, в частности, собак.
Заявленный технический результат достигается следующим образом.
Электронное устройство, носимое животным, для обеспечения контроля за его здоровьем содержит 3-осевой цифровой акселерометр и/или 3-осевой цифровой гироскоп и/или цифровой магнитометр, GPS/GLONASS приемник, датчик температуры, и/или датчик давления, сканер Wi-Fi сетей, и/или Bluetooth, и/или iBeacon, приемопередатчик GSM и/или приемопередатчик NB-IoT, и выполнено с возможностью передачи и сохранения собранных данных параметров здоровья и поведения животного на информационной платформе для обработки полученных данных с помощью алгоритмов машинного обучения и сравнения полученных данных с параметрами животного соответствующей породы и возраста и направления на мобильное устройство пользователя информационного сообщения, включающего сведения о соответствии поведения животного базовым параметрам и/или сведения о местонахождении животного, и/или рекомендации по корректировке режима поведения и питания животного, и/или сообщение о том, что животное находится в опасности, а также выполненное с возможностью его крепления к ошейнику животного посредством рамки с двумя противоположными бортиками, на обращенных друг к другу сторонах которых расположены магниты, модуль располагается между указанными бортиками и снабжен магнитами, взаимодействующими с магнитами на бортиках, при этом под модулем установлена металлическая пластина из условия контакта с магнитами на бортиках, на наружных поверхностях бортиков рамки выполнены выступы, а на противоположных концах металлической пластины крепления выполнены ответные пазы для размещения указанных выступов бортиков рамки.
Магниты могут быть размещены внутри корпуса электронного устройства.
При этом общеизвестно, что процесс жизнедеятельности домашнего животного, например, собаки, сопряжен с постоянной его подвижностью – выгулом, игрой и аналогичными двигательными активностями с одной стороны, при этом, с учетом возраста, породы, размера животного, такая активность может иметь высокий характер. С другой стороны, процесс непосредственной эксплуатации электронного устройства также сопряжен с периодически возникающей необходимостью в его снятии с ошейника домашнего животного для обновления прошивок, установки приложений, скачивания показаний и других действий, а, следовательно, и в обратной установке электронного устройства на ошейник после выполнения перечисленных действий. Как следствие, указанные факторы – двигательная активность и необходимость периодических снятий/установки электронного устройства, были учтены авторами при создании заявленной конструкции, а именно:
используемые в конструкции магниты как средства непосредственной фиксации рамки на ошейник и далее электронного устройства на рамку, выступают простым и надежным крепежным средством, позволяя отказаться от пряжек, застежек и других традиционных компонентов, способных травмировать кожу животного, и в процессе непосредственной эксплуатации устройства позволяя владельцу животного производить снятие/установку электронного устройства одной рукой, второй контролируя положение животного, например, удерживая его за ошейник, при этом, обратный процесс снятия электронного устройства также существенно упрощается, поскольку производится одним простым движением руки для вынимания устройства из рамки с естественным усилием, достаточным для преодоления магнитных сил; кроме того, установка существенно облегчает процесс фиксации устройства на ошейнике, не требуя снятия последнего с животного.
Далее приводится описание возможного способа реализации предложенного технического решения на примере собак.
Способ обеспечения контроля за здоровьем животного, включает:
- наличие связанных между собой посредством информационной платформы мобильного устройства и электронного устройства, носимого животным;
- использование информационной платформы, включающей базу данных и блок обработки информации, содержащей параметры, значения которых характеризуют организм и поведенческие особенности животных, ранжированных по породам и возрасту, включая базовые параметры, значения которых характеризуют здоровое животное и параметры, значения которых отличаются от базовых параметров, и соответствующие каждому значению параметров рекомендации по режиму прогулок и питания животного;
- осуществление при помощи электронного устройства, носимого животным, сбора данных по одному или более параметров здоровья и поведения животного, при этом электронное устройство, носимое животным, содержит компонент, измеряющий состояние организма животного: вес и/или температура тела, и/или артериальное давление, и/или пульс, и компонент, определяющий перемещение животного: местоположение и/или скорость перемещения;
- передачу и сохранение данных на информационной платформе;
- обработку полученных данных с помощью алгоритмов машинного обучения;
- сравнение полученных данных с параметрами животного, соответствующей породы и возраста, содержащейся на информационной платформе и направление на мобильное устройство информационного сообщения, включающего сведения о соответствии поведения животного базовым параметрам, и/или сведения о местонахождении животного, и/или рекомендации по корректировке режима поведения и питания животного, и/или сообщение о том, что животное находится в опасности.
Параметры, значения которых характеризуют организм и поведенческие особенности животных, преимущественно отображаются на мобильном устройстве в виде изображений, графиков, кольцевых диаграмм, индикаторов прогресса и текстовой информации;
Параметры, значения которых характеризуют организм и поведенческие особенности животных, преимущественно выбираются из ряда: период сна и бодрствования животного, число пройденных километров животным, число пройденных шагов животным, длительность периодов активности животного (устройство переведено в активный режим работы), длительность периодов пассивности животного (устройство переведено в пассивный режим работы), частота перехода устройства из активного режима работы в пассивный и обратно в активный.
Сведения о местонахождении животного включают, как правило: данные о перемещениях животного в виде линий траектории на карте, хранящиеся в базе данных, с возможностью их получения в мобильном приложении за любой прошедший день с привязкой ко времени суток.
Изобретение иллюстрируется изображениями на фиг. 1-14.
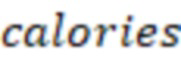
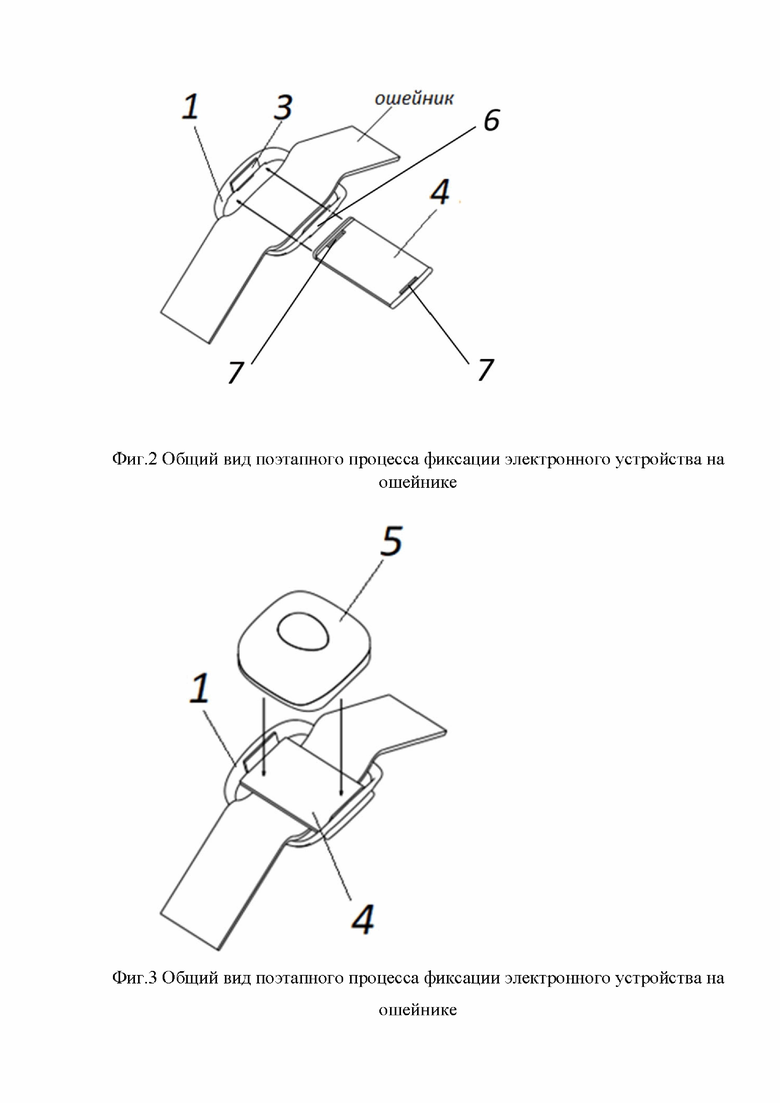
Со ссылкой на фиг.1 рамка 1 заявленного электронного устройства 5, носимого животным, имеет два противоположно расположенных друг относительно друга бортика 2. Внутренняя поверхность каждого из указанных бортиков может быть, например, выполнена с уклоном сверху вниз. На указанных внутренних поверхностях размещены магниты 3, служащие для фиксации электронного устройства, носимого животным, на рамке 1, при этом соответствующие ответные магниты 8 располагают либо внутри корпуса электронного устройства, либо на соответствующих боковых его поверхностях (см. фиг. 5).
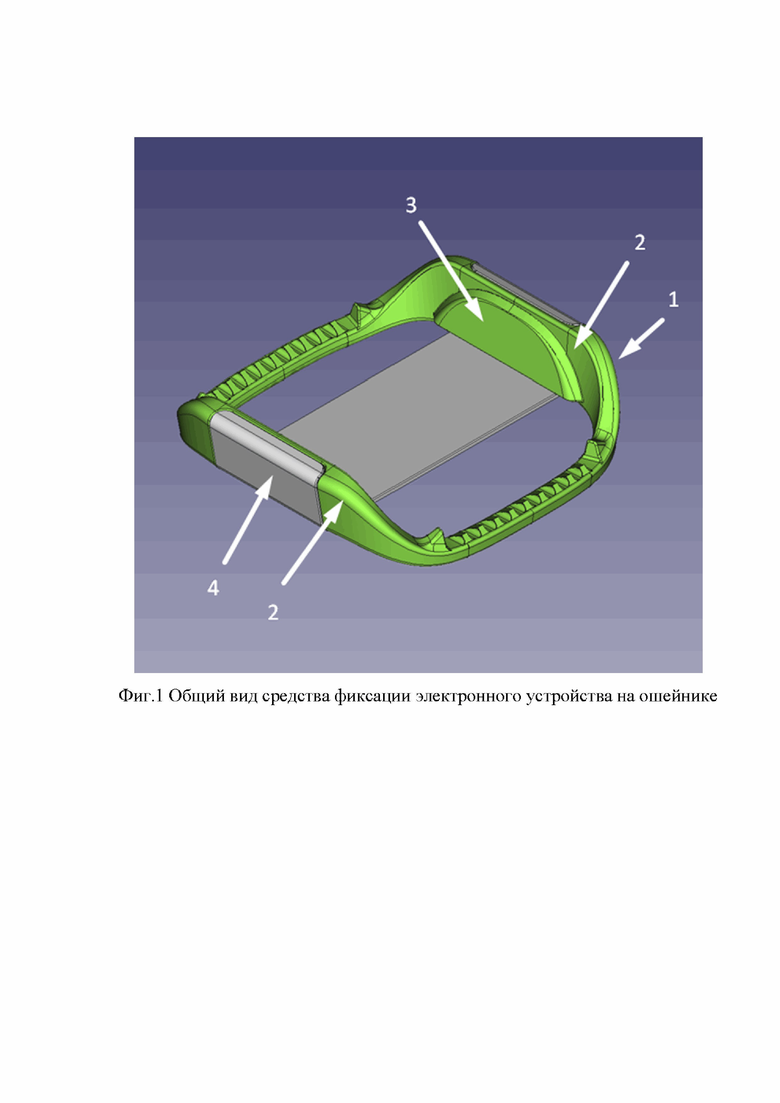
Со ссылкой на фиг.2, фиксация электронного устройства на животном предполагает первоначальную фиксацию рамки на ошейнике посредством расположения её под ремнем ошейника из условия выступа над таким ремнем буртиков и последующей установкой между ремнем и нижним краем рамки из условия контакта с магнитами 3 металлической пластины 4. В процессе эксплуатации указанная пластина обеспечивает распределение нагрузки и отсутствие скольжения устройства по ремню ошейника. Для повышения надежности фиксации на наружных поверхностях бортиков рамки могут быть выполнены выступы 6, а на противоположных концах металлической пластины могут быть выполнены ответные пазы 7 для размещения указанных выступов бортиков рамки.
После установки рамки на ошейнике электронное устройство 5 размещают в указанной рамке путем простого совмещения магнитов на соответствующих сторонах элементов устройства – см.фиг.3.
Со ссылкой на фиг. 4 посредством использования электронного устройства 5, носимого животным, происходит сбор данных о его состоянии. Эти данные передаются через мобильную сеть GSM/3G/LTE/NB-IoT, либо через мобильный телефон владельца животного с помощью Bluetooth на информационную платформу 9, обрабатываются с помощью алгоритмов машинного обучения и возвращаются в виде рекомендаций и координат животного в мобильное приложение.
Для получения данных о состоянии животного используются следующие первичные источники данных - датчики:
- 3-осевой цифровой акселерометр,
- 3-осевой цифрой гироскоп,
- GPS/GLONASS приемник,
- датчик температуры,
- цифровой магнитометр,
- сканер WI-FI сетей,
- Bluetooth iBeacon
и другие.
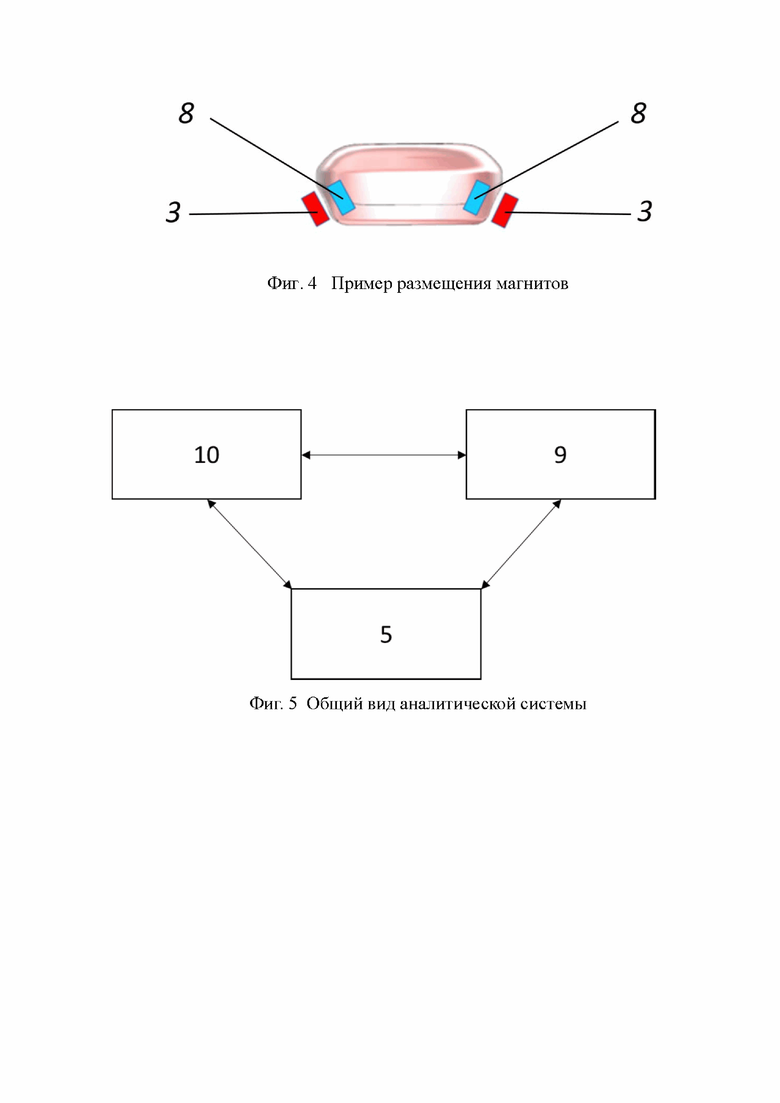
Основными источниками данных для анализа являются 3-осевой цифровой акселерометр и навигационный приемник. Комплексная аналитическая система (см. фиг.4), работающая как на уровне электронного устройства 5, носимого животным, так и на уровне информационной платформы 9, позволяет интерпретировать данные о движении животного, определять его местоположение, делать выводы о его поведении и случаях, опасных для животного.
Информационная платформа 9 предназначена для хранения и обработки данных от электронного устройства 5, носимого животным, сервисной и навигационной информации, позволяет активировать и настраивать SIM-чип электронного устройства 5, носимого животным, активировать и выводить электронное устройство 5, носимое животным, из эксплуатации. Информационная платформа 9 также хранит различные конфигурации устройства и позволяет настраивать и собирать статистику использования и профиль абонентского устройства, позволяет безопасно и отказоустойчиво обновлять устройство по воздуху.
Информационная платформа 9 связана с мобильным телефоном 10 владельца домашнего животного. Мобильное приложение по управлению устройством и пользовательским разделом позволяет активировать различные пользовательские сценарии и режимы работы электронного устройства 5, носимого животным.
Таким образом, применение алгоритмов обработки данных и элементов машинного обучения делают возможным определять следующие, ключевые для владельцев животного параметры:
- активность,
- сон,
- количество затраченной энергии,
- местоположение,
- физическое состояние.
В случае возникновения тревоги (выход за периметр, аномальное поведение, угроза жизни), устройство переходит в режим трекера и передает координаты с максимально возможной частотой для быстрой локализации животного.
Рекомендации по уходу от ветеринаров и данные об активности собаки передаются в мобильное приложение.
Рекомендации по уходу за животным составляются действующими ветеринарными врачами на основе данных, полученных с устройства, о сне, активности и физическом состоянии.
Активность животных:
Одной из функций системы является ежедневное детектирование количества пройденных шагов животным. Это позволяет отслеживать активность питомца и индивидуально составлять план рекомендаций по уходу за ним.
Количество пройденных шагов также влияет на подсчет необходимых для потребления калорий в день.
Для сохранения здоровья питомца необходимо гулять минимум 30-60 минут в день. Очень активным собакам необходимо больше физических нагрузок, например, 120-180 минут.
Так же важно, что, если у собаки есть лишний вес, стоит гулять с ней большее время и проходить большее расстояние.
Данные об активности собаки, в том числе количество пройденных шагов, измеряются устройством 5 и отображаются в мобильном приложении.
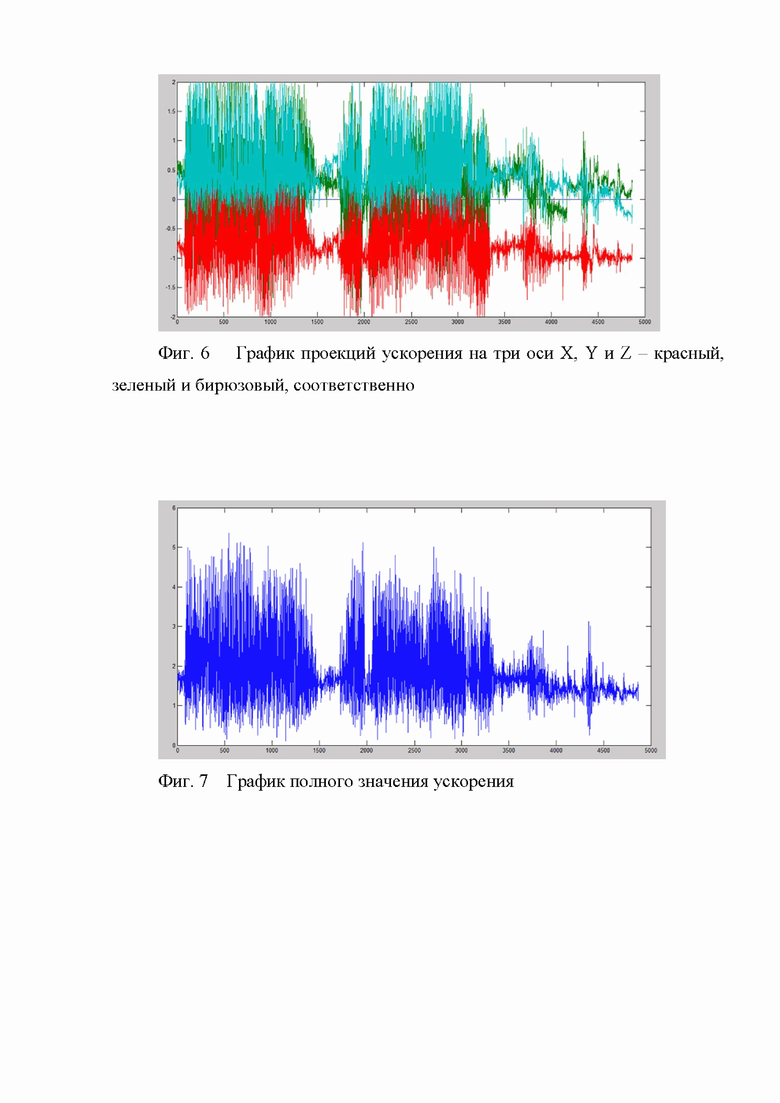
В качестве измерительного устройства используется акселерометр, который детектирует ускорение в проекциях на три оси прямолинейной системы координат – Х, Y и Z (см. фиг. 6).
Акселерометр настраивается на выдачу данных с частотой 31 Гц. В случае использования режима энергосбережения выдача данных происходит с частотой 40 Гц.
Основываясь на значениях проекций ускорения на три оси координат, вычисляется полное значение вектора ускорения (см. фиг. 7) с целью обеспечения работоспособности шагомера вне зависимости от положения акселерометра.
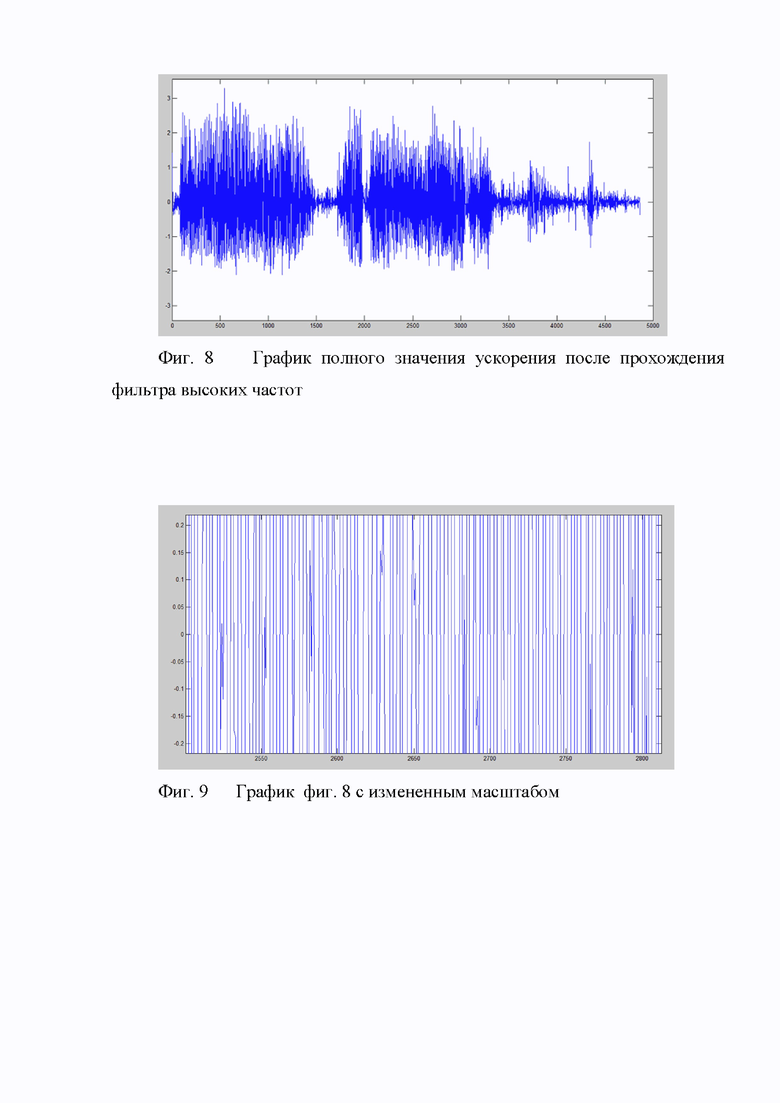
Затем график полного значения ускорения обрабатывается фильтром высоких частот для удаления гравитационного поля (см. фиг. 8). Частота среза составляет 1 Гц.
На фиг. 9 изменен масштаб графика на фиг. 8 по оси Y для более четкой детализации.
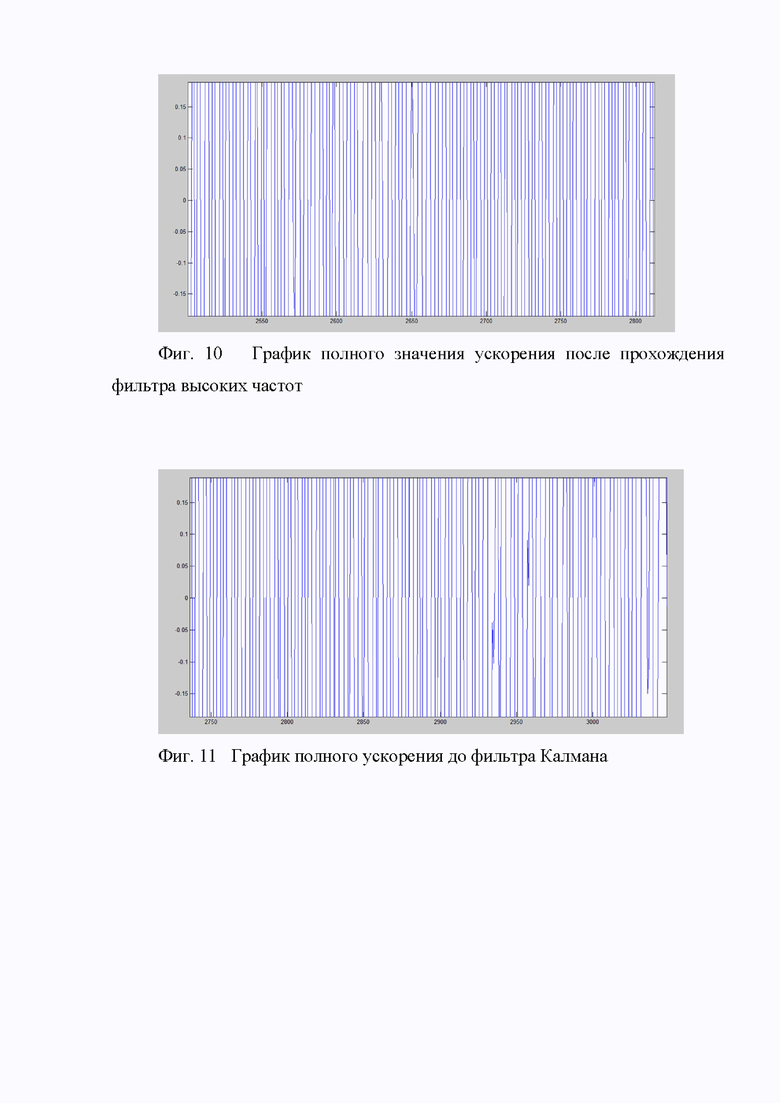
Далее график полного значения ускорения обрабатывается фильтром низких частот для удаления высокочастотных шумов (см. фиг. 10). Частота среза составляет 10 Гц.
После этого полное значение ускорения обрабатывается фильтром Калмана для сглаживания резких перепадов амплитуды.
График полного значения ускорения до фильтра Калмана представлен на фиг. 11.
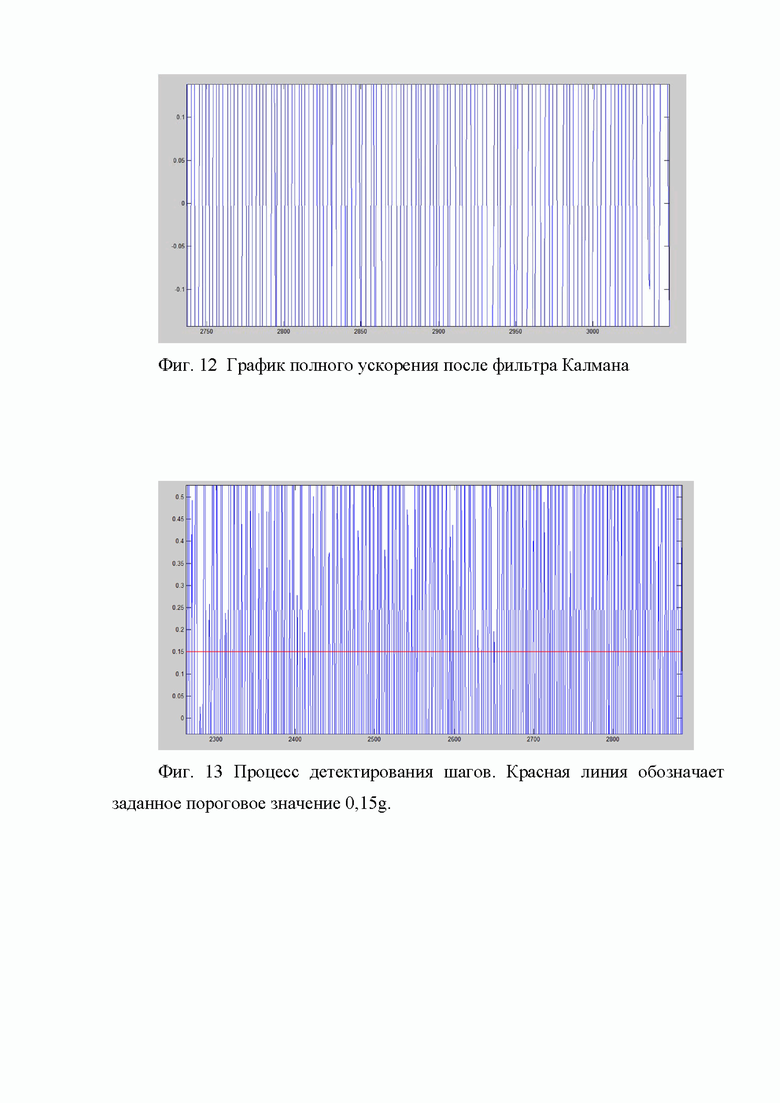
График полного значения ускорения после фильтра Калмана представлен на фиг. 12.
Затем общее значение ускорения обрабатывается пиковым детектором (см. фиг. 13).
Детектирование шага происходит, если амплитуда ускорения превысила заданное пороговое значение.
Пороговое значение зависит от роста животного в холке и, как следствие, длины его шага. Соответственно, для каждого животного пороговое значение будет уникальным.
Рекомендованное количество шагов (рекомендованное расстояние):
Мини (<3 кг): 3-4 км в день, 8500-11 500 шагов
Маленькие (3-10 кг): 4-7 км в день, 8000-12 000 шагов
Средние (10-<25 кг): 5-10 км в день, 6250-13 000 шагов
Крупные (25-<40 кг): 15-17 км в день, 15 000 – 17 000 шагов
Гигантские (≥40 кг): 17-20 км в день, 13 600 – 15 000 шагов
Длина шага для каждого типа собак:
Мини (<3 кг) 0.3 ± 0.08 (м)
Маленькие (3-10 кг) 0.45 ± 0.10 (м)
Средние (10-<25 кг) 0.74 ± 0.11(м)
Крупные (25-<40 кг) 0.95 ± 0.1 (м)
Гигантские (≥40 кг) 1.2 ± 0.1 (м)
Формула для нахождения рекомендованного количества шагов:
где  – рекомендованное количество шагов,
– рекомендованное количество шагов,
 – рекомендованное расстояние,
– рекомендованное расстояние,
 – длина шага.
– длина шага.
Формула для нахождения времени прогулки:
 секунд,
секунд,
где  – время прогулки,
– время прогулки,
 – количество пакетов с данными по шагам, передаваемых с устройства.
– количество пакетов с данными по шагам, передаваемых с устройства.
Формула для нахождения пройденного расстояния за сегодня на текущий момент:

где  – пройденное расстояние за сегодня на текущий момент,
– пройденное расстояние за сегодня на текущий момент,
 – количество шагов за сегодня на текущий момент,
– количество шагов за сегодня на текущий момент,
 – длина шага.
– длина шага.
Рекомендованное расстояние (distance) – табличный показатель, задаваемый для каждого типового размера собаки, который предоставляется ветеринаром.
Длина шага (stepLength) – табличный показатель, задаваемый для каждого типового размера собаки, который предоставляется ветеринаром.
Целевое время прогулки – табличный показатель, задаваемый для каждого типового размера собаки, который предоставляется ветеринаром.
Количество шагов за сегодня на текущий момент – это суммарное количество шагов, полученное с электронного устройства на текущий момент (суммирование производится на облачном сервере, а не на устройстве).
По каждому животному производится расчет интенсивности за различные периоды времени (минута, час, день, неделя, месяц, год).
Получаемые с электронного устройства, носимого животным, показатели максимального ускорения за 60 секунд сравниваются с табличными интервалами интенсивности движения согласно справочнику интенсивности по каждому типовому размеру.
Расчеты по физическому состоянию животного, а также сна:
Расчет физического состояния животного (находится ли оно в аномальном для себя состоянии или ему угрожает опасность) осуществляется путем накопления эмпирических данных по каждому из пяти типов собак.
Данные накапливаются, агрегируются по:
- показателю максимального ускорения,
- данным о длительности работы активного и пассивного режимов.
Активный режим – один из режимов работы устройства, при котором животное двигается и акселерометр считывает шаги. В пассивный режим устройство переключается, когда животное в покое.
Если в какой-либо промежуток времени зафиксировано состояние, соответствующее модели сна, то считается, что собака данного типа спит.
Если собака ведет себя не в соответствии с нормальной моделью поведения для этого типа собаки, то считается, что есть риск того, что собаке угрожает опасность. За определенное время работы устройства происходит построение нормальной модели поведения собаки, основываясь на ее средней активности в течение дня. Если поведение собаки сильно отличается от нормальной модели, то считается, что есть риск опасности.
Примеры реализации:
1) На улице слишком высокая или слишком низкая температура. Устройство непрерывно измеряет температуру и, в случае, если температура выше или ниже критического уровня, то отправляет на мобильное устройство пользователя уведомление о том, что гулять больше 30 минут не рекомендуется. Если по истечении 30 минут пользователь не завершил прогулку с питомцем, то на мобильное устройство поступит дополнительное уведомление о превышении рекомендуемого времени прогулки.
2) Животное чешется чаще, чем при нормальной модели поведения. Устройство считывает это с помощью датчиков и отправляет на мобильное устройство пользователя уведомление и рекомендации от ветеринарных врачей.
3) Животное долго и непрерывно бежит, что не соответствует нормальной модели поведения, возможно оно напугано и ему угрожает опасность. Устройство отслеживает маршрут перемещения животного, уведомляет хозяина в мобильном приложении, высылает координаты и строит маршрут перемещения.
Определение коэффициента RER и количества затрачиваемых ккал в сутки:
Рекомендации ветеринаров базируются на расчете коэффициента RER (Resting Enegry Requirements - энергия для выполнения основных функций организма, таких как пищеварение, дыхание, функции сердца, функции мозга и т.д.), который определяет необходимый суточный объем потребляемых ккал для животного.
Все животные типизированы по массе, росту в холке и породе, что дает возможность определить для каждой конкретной собаки необходимое с физиологической точки зрения количество затрачиваемых ккал в сутки. Оно подсчитывается по формулам для нахождения индекса RER и зависит от:
1) породы (масса тела, рост в холке, этап жизни),
2) образа жизни (сон, активность, физическое состояние).
Данные о породе вносятся в мобильное приложение и не изменяются. На их основе строятся базовые значения необходимых для затрачивания ккал в сутки. Методы для нахождения базовых значений определяют ветеринарные врачи.
Данные об образе жизни (сне, активности, физическом состоянии) измеряются устройством, носимым животным, и определяют актуальное значение затраченной животным энергии.
Далее полученные данные об образе жизни сопоставляются с данными о породе, и на их основе определяются рекомендации по уходу за животным.
Типизация производится по весу и росту в холке собаки. Если эти данные не указаны, то типизация производится породе. Если и она не указана, показатели активности не рассчитываются. Типизация пород собак по весу оформляется в виде табличных показателей, для каждого веса свои нормы.
Факторы, влияющие на подсчет индекса RER:
Перед началом использования устройства в приложении необходимо указать:
- пол животного,
- возраст животного,
- кастрировано животное или нет (опционально для самок возможно выбрать подпункт беременность (взаимоисключающее с «кастрировано») и лактация (взаимоисключающее с беременностью)),
- активность собаки (например, аджилити),
- является ли собака рабочей (например, пастушьи собаки, работа в полиции, цирк, и т.д.),
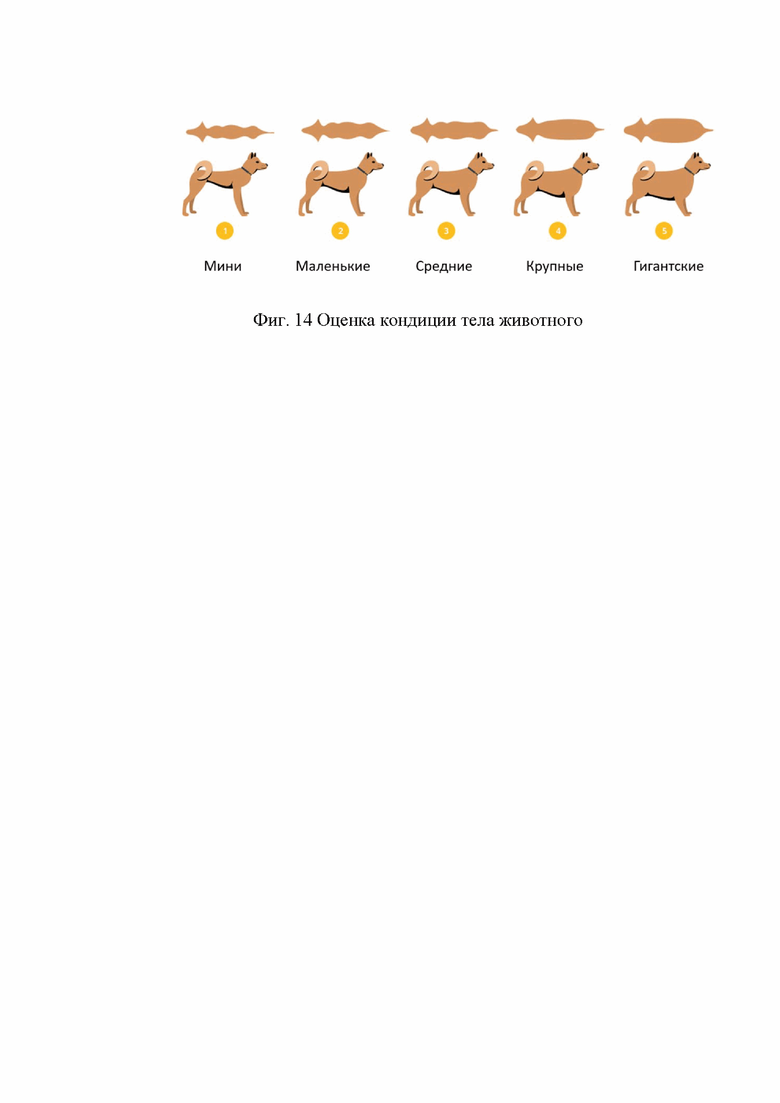
- кондицию тела собаки согласно пятибалльной шкале,
- тип породы по весу.
Для каждой собаки составляется своя модель затрачиваемой энергии в сутки.
При помощи нейросети составляется предполагаемая карта жирового слоя животного по фото. Все параметры привязываются к специально разработанным моделям животного.
Пользователь заходит в приложение, открывает экран оценки кондиции, который представляет собой включенную камеру с наложением очертания идеального веса (3 балла) собаки в профиль (вид сбоку). После того, как пользователь фотографирует, отображается такой же экран, но с очертанием собаки на виде сверху. Пользователь также фотографирует собаку.
Далее система анализирует: насколько реальные очертания собаки выходят за пределы границ идеального очертания либо не дотягиваются до него, и сравнивает с эталонными фотографиями. После этого система назначает собаке кондицию тела от 1 до 5 (см. фиг. 14).
Типы пород собак по весу.
По весу собак обычно делят на 5 типов:
- мини (<3 кг),
- маленькие (<10 кг),
- средние (10-<25 кг),
- крупные (25-<40 кг)
- гигантские (≥40 кг).
Расчет RER:
Формула расчета ккал/сутки:

где  – энергетические потребности в покое,
– энергетические потребности в покое,
Большинство собак при такой калорийности будут терять вес. Поэтому есть поправки к RER, реализуемые в виде коэффициента поправок. Кроме указанных в таблице поправок на RER больше ничего не влияет.

 – коэффициент поправок к , является табличным показателем, справочник может быть расширен,
– коэффициент поправок к , является табличным показателем, справочник может быть расширен,
 – калории.
– калории.
Пример расчета
Пользователь выбирает балл в шкале кондиций тела от 1 до 5 для взрослой собаки 1-10 ЛЕТ (не рабочие, не занимаются тяжелым спортом, не беременны, не лактируют).
1 балл – используется коэффициент поправок к RER 2.2
2 балла – используется коэффициент поправок к RER 2
3 балла – используется коэффициент поправок к RER 1.6 для кастрированных, 1.8 для некастрированных
4 балла – используется коэффициент поправок к RER 1.2 для кастрированных, 1.4 для некастрированных
5 баллов – используется коэффициент поправок к RER 1 для кастрированных, 1.1 для не кастрированных.
Например, собака весит 14 кг:
30 х 14 кг + 70 = 490 ккал
Допустим по шкале кондиций тела эта собака 4/5, есть цель потерять вес:
490 х 1.2 (т.к. кастрировано, но есть лишний вес) = 588 ккал
Коэффициент поправок зависит от показателя поправки и его значения. Показатели поправок не равнозначны и имеют разный приоритет.
Данные справочника коэффициентов поправок динамические и формируются на собранных эмпирических данных с электронных устройств, обработанных с использованием machine learning.
Первичное наполнение справочника предоставляется ветеринарным специалистом. После чего данные по количеству шагов и интенсивности движения, переключения режимов (активный-пассивный) обрабатываются и анализируется, насколько заданного количества калорий достаточно данному типовому размеру собаки (анализ по типовым размерам, а не по каждой собаке в отдельности). В случае, если будет выявлено, что собаке достаточно/недостаточно потребляемых калорий, то коэффициенты будут меняться.
Также анализируется обратная связь от пользователей приложения, и список коэффициентов поправок может быть расширен по итогам обратной связи, вставая в общую схему приоритетов.
Расчеты по местоположению:
Для точного вычисления местоположения геоданные обрабатываются на четырех уровнях:
1. Физическом. Получение и сохранение сырых данных от устройств по физическим каналам: GPS, Wi-Fi, LBS или по iBeacon (по удаленности от пользователя).
2. Валидационном. Обработка входящих геоданных:
a. статистическая с использованием алгоритмов машинного обучения, чтобы сглаживать маршруты, т.е. чтобы местоположение было читаемым для пользователя;
b. на треке времени, чтобы последующая координата была позднее предыдущей;
c. с учётом покрытия по геохешам, для учета точности и погрешностей положения и удобства хранения, а также использования;
d. с учётом типа физических данных по каналам и их комбинаций.
3. Географическом. Приведение физических данных к формату геоданных и сохранение их с привязкой к геохэшам, пользователям, устройствам.
4. Пользовательском. Формирование результатов по пользовательским триггерам.
Изобретение относится к устройствам мониторинга показателей жизнедеятельности и здоровья животных. Технический результат заключается в повышении надежности крепления модуля для мониторинга к ошейнику животного. Технический результат достигается посредством рамки с двумя противоположными бортиками, на обращенных друг к другу сторонах которых расположены магниты, модуль располагается между указанными бортиками и снабжен магнитами, взаимодействующими с магнитами на бортиках, при этом под модулем установлена металлическая пластина из условия контакта с магнитами на бортиках, на наружных поверхностях бортиков рамки выполнены выступы, а на противоположных концах металлической пластины крепления выполнены ответные пазы для размещения указанных выступов бортиков рамки. 14 ил.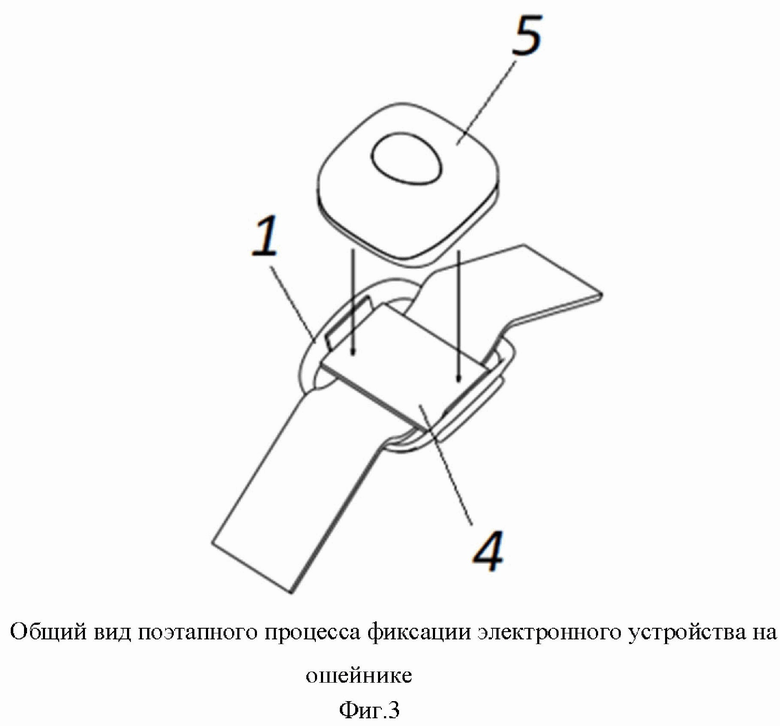
Электронное устройство, носимое животным, для обеспечения контроля за его здоровьем, содержащее 3-осевой цифровой акселерометр, и/или 3-осевой цифровой гироскоп, и/или цифровой магнитометр, GPS/GLONASS приемник, датчик температуры и/или датчик давления, сканер Wi-Fi сетей, и/или Bluetooth, и/или iBeacon, приемопередатчик GSM и/или приемопередатчик NB-IoT, выполненное с возможностью передачи и сохранения собранных данных параметров здоровья и поведения животного на информационной платформе для обработки полученных данных с помощью алгоритмов машинного обучения и сравнения полученных данных с параметрами животного соответствующей породы и возраста и направления на мобильное устройство пользователя информационного сообщения, включающего сведения о соответствии поведения животного базовым параметрам, и/или сведения о местонахождении животного, и/или рекомендации по корректировке режима поведения и питания животного, и/или сообщение о том, что животное находится в опасности, а также выполненное с возможностью его крепления к ошейнику животного посредством рамки с двумя противоположными бортиками, на обращенных друг к другу сторонах которых расположены магниты, модуль располагается между указанными бортиками и снабжен магнитами, взаимодействующими с магнитами на бортиках, при этом под модулем установлена металлическая пластина из условия контакта с магнитами на бортиках, на наружных поверхностях бортиков рамки выполнены выступы, а на противоположных концах металлической пластины крепления выполнены ответные пазы для размещения указанных выступов бортиков рамки.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Кантователь поковок | 1960 |
|
SU131203A1 |
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| US 20190167106 A1, 06.06.2019 | |||
| СИСТЕМЫ И СПОСОБЫ ПРЕДОСТАВЛЕНИЯ РЕКОМЕНДАЦИЙ ПО ЗДОРОВЬЮ, ПИТАНИЮ И/ИЛИ БЛАГОПОЛУЧИЮ ЖИВОТНЫХ | 2015 |
|
RU2694196C1 |
