Область техники, к которой относится изобретение
Настоящее изобретение относится к системам и способам, которые выявляют животное, расположенное возле транспортного средства, с помощью устройства, носимого или прикрепленного к животному.
УРОВЕНЬ ТЕХНИКИ
Животные и транспортные средства часто располагаются в одних и тех же зонах, что может приводить к сбиванию животного, такого как домашнее животное, транспортным средством. Типично, водитель транспортного средства не осведомлен о животных поблизости от транспортного средства и может случайно сбить животное, что может травмировать животное и/или повредить транспортное средство. Например, если собака (или другое животное) выбежит перед транспортным средством, водитель транспортного средства, неосведомленный о собаке поблизости от транспортного средства, может не иметь достаточного времени, чтобы остановить или направить транспортное средство для избежания сбивания собаки. Дополнительно, животные могут убегать из дома, так что владелец животного должен разыскивать пропавшее животное. Соответственно, есть необходимость в системе и способе, которые уведомляют водителей транспортных средств, когда животные расположены рядом с транспортным средством, и помогают владельцам животных определять местонахождение животных, которые убежали из дома владельца.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Неограничивающие и неисчерпывающие варианты осуществления настоящего изобретения описаны со ссылкой на нижеследующие фигуры, на которых одинаковые номера ссылок указывают на идентичные части на всем протяжении различных фигур, если не указан иной способ действий.
Фиг. 1 - структурная схема, изображающая примерную среду, способную реализовывать системы и способы, обсужденные в материалах настоящей заявки.
Фиг. 2 - структурная схема, изображающая вариант осуществления диспетчера связи.
Фиг. 3 - структурная схема, изображающая вариант осуществления носимого устройства, допускающего ношение или переноску животным.
Фиг. 4 - блок-схема последовательности операций способа, изображающая вариант осуществления способа для уведомления водителя о животном, расположенном рядом с транспортным средством.
Фиг. 5 - блок-схема последовательности операций способа, изображающая вариант осуществления способа для определения частоты мигания символа «рядом домашнее животное» на приборной панели транспортного средства.
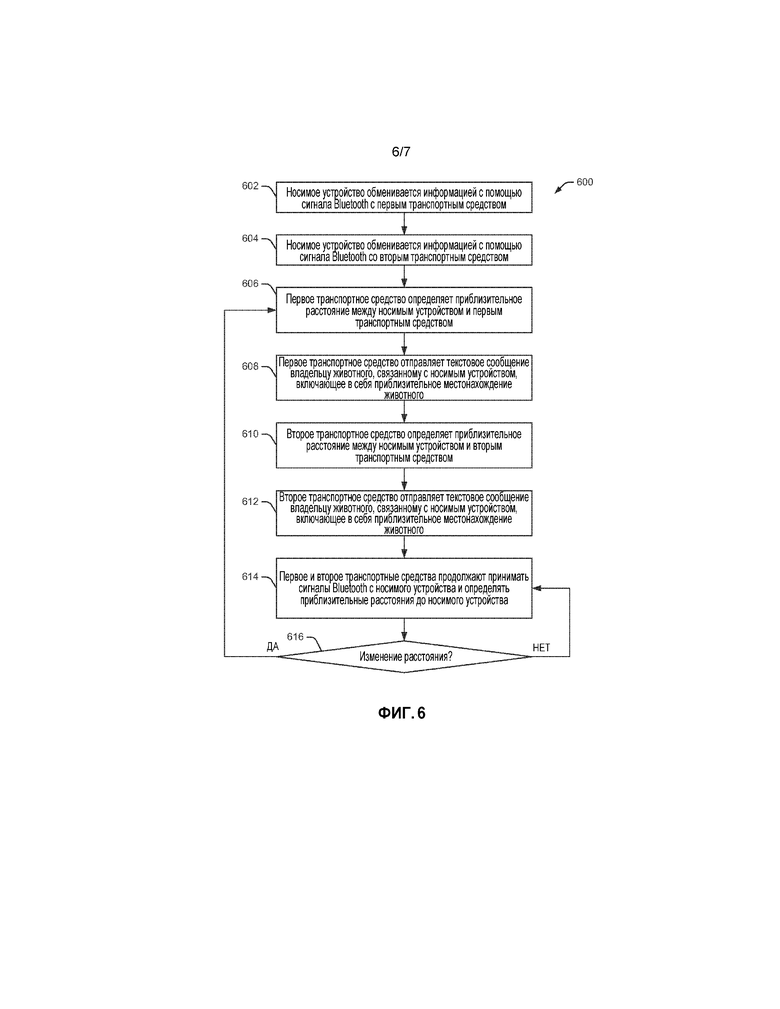
Фиг. 6 - блок-схема последовательности операций способа, изображающая вариант осуществления способа для определения местонахождения животного, имеющего носимое устройство.
Фиг. 7 - блок-схема последовательности операций способа, изображающая вариант осуществления способа для выявления в транспортном средстве животного под угрозой.
ПОДРОБНОЕ ОПИСАНИЕ
В нижеследующем описании сделана ссылка на прилагаемые чертежи, которые формируют его часть, и на которых, в качестве иллюстрации, показаны конкретные примерные варианты осуществления, в которых изобретение может быть осуществлено на практике. Эти варианты осуществления описаны достаточно подробно, чтобы давать специалистам в данной области техники возможность осуществить на практике концепции, раскрытые в материалах настоящей заявки, и должно быть понятно, что могут быть произведены изменения в отношении различных раскрытых вариантов осуществления, и другие варианты осуществления могут использоваться, не выходя из объема настоящего изобретения. Нижеследующее подробное описание, поэтому, не должно пониматься в ограничительном смысле.
Ссылка на всем протяжении этого описания изобретения на «один из вариантов осуществления», «вариант осуществления», «один из примеров» или «пример» означает, что конкретный признак, конструкция или характеристика, описанные в связи с вариантом осуществления или примером, включены по меньшей мере в один вариант осуществления настоящего изобретения. Таким образом, появления фраз «в одном из вариантов осуществления» или «в варианте осуществления», «один из примеров» или «пример» в разных местах на всем протяжении этого описания изобретения не обязательно все указывают ссылкой на один и тот же вариант осуществления или пример. Более того, конкретные признаки, конструкции, базы данных или характеристики могут комбинироваться в любых пригодных комбинациях и/или подкомбинациях в одном или более вариантов осуществления или примеров. В дополнение, следует понимать, что фигуры, предусмотренные таким образом, предназначены для разъяснительных целей рядовым специалистам в данной области техники, и что чертежи не обязательно начерчены в масштабе.
Варианты осуществления в соответствии с настоящим изобретением могут быть воплощены в виде устройства, способа или компьютерного программного продукта. Соответственно, настоящее изобретение может принимать форму состоящего полностью из аппаратных средств варианта осуществления, состоящего полностью из программного обеспечения варианта осуществления (включающего в себя микропрограммное обеспечение, резидентное программное обеспечение, микрокод, и т. п.) или варианта осуществления, объединяющего аспекты программного обеспечения и аппаратных средств, которые, в целом, все могут указываться ссылкой в материалах настоящей заявки как «схема», «модуль» или «система». Более того, варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта, воплощенного на любом материальном носителе представления, имеющем используемую компьютером управляющую программу, воплощенную на носителе.
Может использоваться любая комбинация одного или более используемых компьютером или машинно-читаемых носителей. Например, машинно-читаемый носитель может включать в себя одно или более из съемной компьютерной дискеты, жесткого диска, оперативного запоминающего устройства (ОЗУ, RAM), постоянного запоминающего устройства (ПЗУ, ROM), стираемого программируемого постоянного запоминающего устройства (СППЗУ, EPROM или флэш-памяти), съемного постоянного запоминающего устройства на компакт-диске (CDROM), оптического запоминающего устройства и магнитного запоминающего устройства. Компьютерная управляющая программа для выполнения операций по настоящему изобретению может быть написана на любой комбинации одного или более языков программирования. Такая программа может компилироваться из исходной программы на машинно-читаемый язык ассемблера или в машинный код, пригодный для устройства или компьютера, на котором будет выполняться программа.
Варианты осуществления также могут быть реализованы в облачных вычислительных средах. В этом описании и нижеследующей формуле изобретения, «облачные вычисления» могут быть определены в качестве модели для предоставления возможности повсеместного, удобного, действующего по запросу сетевого доступа к совместно используемому объединению конфигурируемых вычислительных ресурсов (например, сетей, серверов, хранилищ, приложений и служб), которые могут быстро предоставляться с помощью виртуализации и освобождаться с минимальными усилиями на администрирование или взаимодействие с поставщиком услуг, а кроме того, соответствующим образом масштабироваться. Облачная модель может состоять из различных характеристик (например, действующего по запросу самообслуживания, обширного сетевого доступа, создания объединения ресурсов, быстрой адаптивности и измеримого обслуживания), моделей обслуживания (например, программного обеспечения в виде услуги («SaaS»), платформы в виде услуги («PaaS») и инфраструктуры в виде услуги («IaaS»)) и моделей развертывания (например, частного облака, коллективного облака, общедоступного облака и гибридного облака).
Блок-схемы последовательностей операций способов или структурные схемы на прилагаемых фигурах иллюстрируют архитектуру, функциональные возможности и работу возможных реализаций систем, способов и компьютерных программных продуктов согласно различным вариантам осуществления настоящего изобретения. В этом отношении, каждый структурный элемент на блок-схемах последовательностей операций способов или структурных схемах может представлять собой модуль, сегмент, порцию кода, которые содержат одну или более исполняемых команд для реализации заданной логической функции(ий). Также будет отмечено, что каждый структурный элемент структурных схем и/или блок-схем последовательностей операций способов и комбинации структурных элементов структурных схем и/или блок-схем последовательностей операций способов могут быть реализованы основанными на аппаратных средствах специального назначения системами, которые выполняют заданные функции или действия, или комбинациями аппаратных средств специального назначения и компьютерных команд. Эти команды компьютерной программы также могут храниться на машинно-читаемом носителе, который может управлять компьютером или другим программируемым устройством обработки данных, чтобы функционировали конкретным образом, так чтобы команды, хранимые на машинно-читаемом носителе, создавали готовое изделие, включающее в себя командное средство, который реализует функцию/действие, заданные в структурном элементе или структурных элементах блок-схемы последовательности операций способа и/или структурной схемы.
Системы и способы, описанные в материалах настоящей заявки, вводят в действие устройство, носимое (или несомое) животным, когда устройство находится на предопределенном расстоянии от транспортного средства. Транспортное средство принимает сигнал из устройства, такой как сигнал Bluetooth. Процессор в транспортном средстве определяет приблизительное расстояние между устройством и транспортным средством. Для водителя транспортного средства засвечивается символ (например, на приборной панели или панели отображения информации) с частотой, которая соответствует приблизительному расстоянию между устройством и транспортным средством. Например, символ засвечивается с большей частотой, когда устройство находится ближе к транспортному средству.
Конкретные примеры, обсужденные в материалах настоящей заявки, относятся к сообщению о близости собаки или другого домашнего животного к водителю транспортного средства. Однако, описанные системы и способы применимы к любому типу животного или объекта. Например, носимое устройство, как обсуждено в материалах настоящей заявки, может носиться животным, человеком или другим объектом, которые могут находиться поблизости от транспортного средства. В некоторых вариантах осуществления, носимое устройство может быть расположено на велосипеде или детской игрушке для игры на открытом воздухе. В этих вариантах осуществления, носимое устройство может предупреждать водителя транспортного средства, что объект, несущий носимое устройство, расположен поблизости от транспортного средства.
В качестве используемого в материалах настоящей заявки, транспортное средство включает в себя легковой автомобиль, грузовой автомобиль, автобус, автофургон, мотоцикл, мотороллер, велосипед, и тому подобное. Конкретные примеры, обсужденные в материалах настоящей заявки, относятся к использованию системы беспроводной связи Bluetooth. Однако, описанные системы и способы применимы к любому типу системы беспроводной связи, использующей любой протокол связи или систему обмена сообщениями.
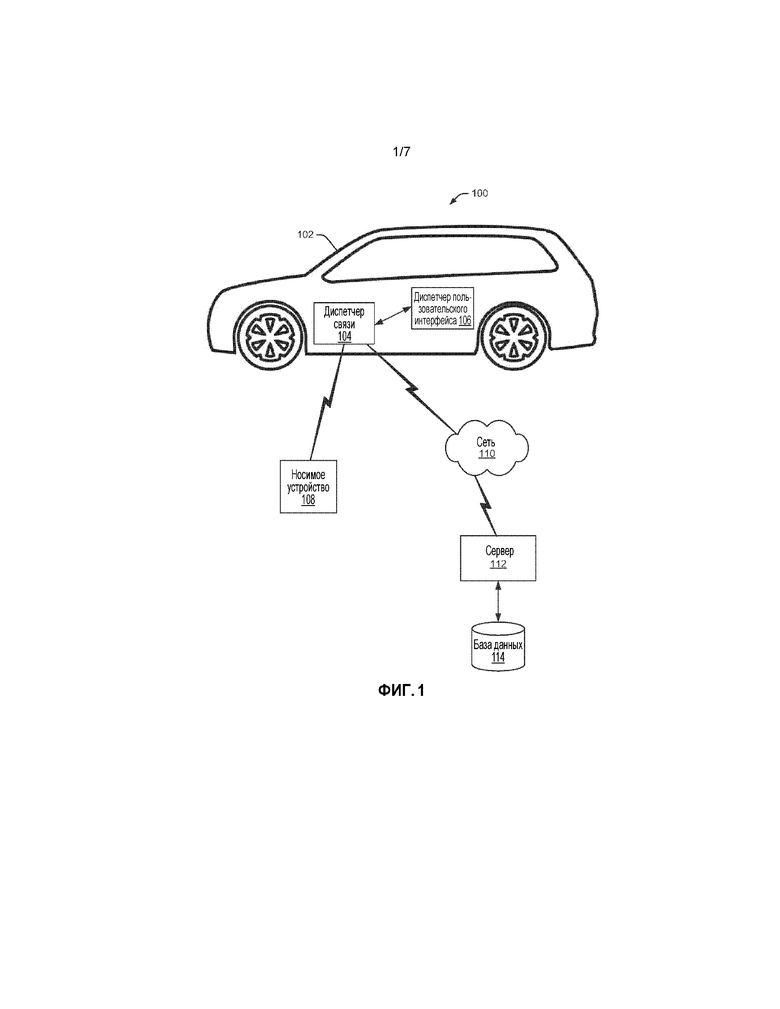
Фиг. 1 - структурная схема, изображающая примерную среду 100, способную реализовывать системы и способы, обсужденные в материалах настоящей заявки. Транспортное средство 102 включает в себя диспетчер 104 связи, который управляет передачей данных между транспортным средством 102 и носимым устройством 108. Как обсуждено в материалах настоящей заявки, носимое устройство 108 является любым устройством, способным быть носимым, прикрепляться к или носиться животным, человеком или объектом. В некоторых вариантах осуществления, носимое устройство 108 является ошейником животного или меткой (или другим устройством), прикрепленном к ошейнику животного. Носимое устройство 108 способно поддерживать беспроводную связь с диспетчером 104 связи, когда носимое устройство 108 находится в пределах дальности действия связи диспетчера 104 связи. В некоторых вариантах осуществления, носимое устройство 108 является устройством Bluetooth, а диспетчер 104 связи поддерживает связь Bluetooth. В конкретных реализациях, носимое устройство 108 является устройством Bluetooth с малым потреблением энергии (BLE).
Диспетчер 104 связи присоединен к диспетчеру 106 пользовательского интерфейса, который способен представлять информацию водителю и/или пассажиру транспортного средства 102. В некоторых вариантах осуществления, диспетчер 106 пользовательского интерфейса управляет отображением мигающего символа, который указывает животное поблизости от транспортного средства 102. В других вариантах осуществления, диспетчер 106 пользовательского интерфейса управляет представлением других визуальных или звуковых указаний, которые уведомляют водителя или пассажира транспортного средства 102, что животное находится поблизости от транспортного средства 102. Это уведомление предоставляет водителю возможность быть более бдительным и наблюдать за животным во время вождения.
Диспетчер 104 связи может периодически обмениваться информацией с сетью 110 передачи данных, такой как сеть Интернет или другая сеть. Например, диспетчер 104 связи может поддерживать связь с сервером 112 через сеть 110. Сервер 112 может осуществлять доступ к данным из базы 114 данных, которая включает в себя информацию профиле пользователя, информацию об адресах Bluetooth, связанную с различными носимыми устройствами 108, и другие данные. Эти доступные данные передаются в диспетчер 104 связи для содействия при определении владельца животного, носящего носимое устройство 108. Каждое носимое устройство 108 имеет уникальный адрес Bluetooth, который может быть связан с конкретным пользователем. Как обсуждено в материалах настоящей заявки, диспетчер 104 связи может отправлять сообщение владельцу животного, когда связанный адрес Bluetooth выявлен поблизости от транспортного средства 102. Дополнительно, диспетчер 104 связи может определять текущее географическое местоположение транспортного средства 102, с использованием GPS (глобальной системы определения местоположения), содержащейся в транспортном средстве 102.
В примерном варианте 100 осуществления, показанном на фиг. 1, носимое устройство 108 показано в качестве поддерживающего связь с одним транспортным средством 102. В других вариантах осуществления, конкретное носимое устройство 108 может поддерживать связь с многочисленными транспортными средствами 102, если более чем одно транспортное средство 102 находится поблизости от носимого устройства 108. В этой ситуации, все водители и пассажиры многочисленных транспортных средств уведомляются о животном поблизости от транспортного средства. Дополнительно, как обсуждено в материалах настоящей заявки, каждое из многочисленных транспортных средств может передавать сообщения (например, текстовые сообщения) владельцу животного, носящего носимое устройство, тем самым, уведомляя владельца о приблизительном местонахождении животного.
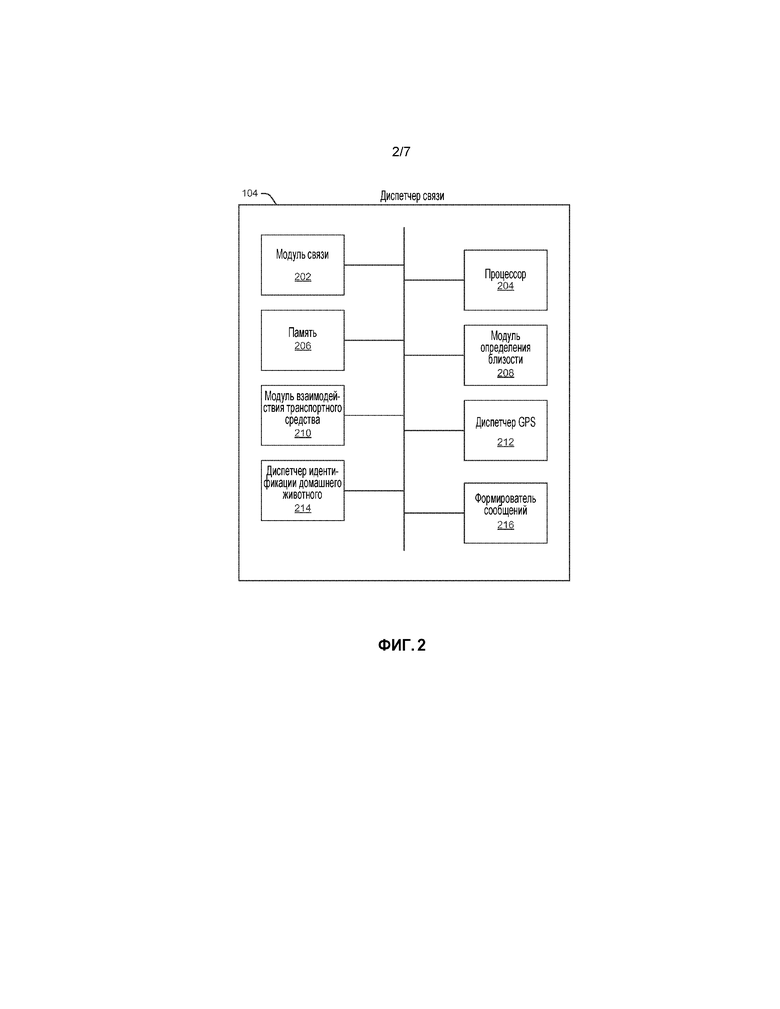
Фиг. 2 - структурная схема, изображающая вариант осуществления диспетчера 104 связи. Как показано на фиг. 2, диспетчер 104 связи включает в себя модуль 202 связи, процессор 204 и память 206. Модуль 202 связи предоставляет диспетчеру 104 связи возможность поддерживать связь с другими системами или компонентами, такими как диспетчер 106 пользовательского интерфейса, носимое устройство 108, сеть 110, сервер 112, или тому подобное. Дополнительно, модуль 202 связи может поддерживать связь с другими системами или устройствами в транспортном средстве 102 через шину, такую как шина CAN (локальной сети контроллеров). Процессор 204 выполняет различные команды для реализации функциональных возможностей, предусмотренных диспетчером 104 связи. Процессор 204 может включать в себя любой тип процессора общего применения или специального назначения для приведения в исполнение управляющих программ или команд. Память 206 хранит эти команды, а также другие данные, используемые процессором 204 или другими модулями, содержащимися в диспетчере 104 связи. Дополнительно, память 206 может хранить специфичную пользователю информацию, такую как информацию профиля пользователя, пользовательские параметры связи, и тому подобное.
Диспетчер 104 связи также включает в себя модуль 208 определения близости, который рассчитывает приблизительное расстояние между транспортным средством 102 и носимым устройством 108. Имеются в распоряжении различные технологии для определения приблизительного расстояния между двумя устройствами, обменивающимися информацией друг с другом беспроводным образом. В некоторых вариантах осуществления, расстояние между транспортным средством 102 и носимым устройством 108 определяется с использованием оценки радиочастотного «пролетного времени». Например, одна из технологий измеряет взаимное расположение между известными местоположениями и сравнивает таковые с неизвестным местоположением/взаимным расположением, такими как у домашнего животного, человека или объекта. Затем, технология преобразует взаимное расположение с неизвестным объектом в физическое местоположение на карте.
Модуль 210 взаимодействия транспортного средства координирует обмен информацией между диспетчером 104 связи и другими системами и компонентами транспортного средства, такими как диспетчер 106 пользовательского интерфейса, системы GPS, информационно-развлекательные системы, водительские системы отображения и тому подобные. Диспетчер 212 GPS способен декодировать сигналы GPS, чтобы определять текущее географическое местоположение транспортного средства 102. Как обсуждено в материалах настоящей заявки, текущее географическое местоположение транспортного средства 102 может сообщаться владельцу животного, носящего носимое устройство 108. Диспетчер 214 идентификации домашнего животного определяет владельца, связанного с конкретным животным, носящим носимое устройство 108, и формирователь 216 сообщений формирует различные сообщения, такие как сообщения владельцу конкретного животного. Формирователь 216 сообщений способен формировать различные типы сообщений, такие как текстовые сообщения, сообщения электронной почты и тому подобные.
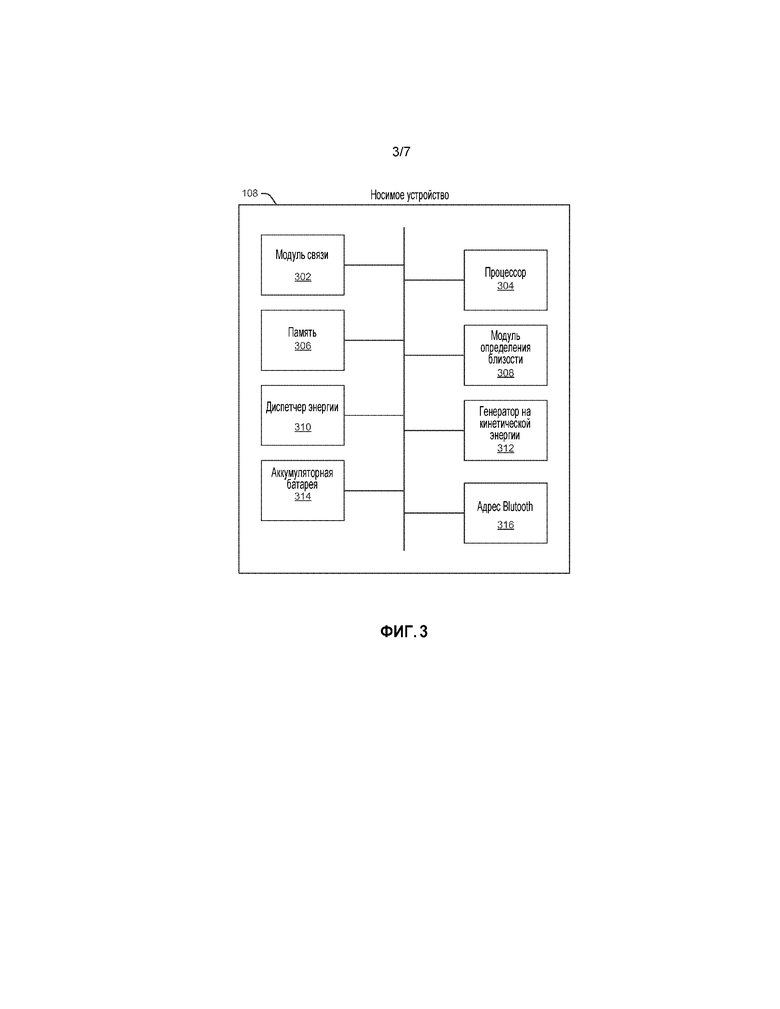
Фиг. 3 - структурная схема, изображающая вариант осуществления носимого устройства 108, прикрепленного к или несомого животным, человеком или объектом. Как показано на фиг. 3, носимое устройство 108 включает в себя модуль 302 связи, процессор 304 и память 306. Модуль 302 связи предоставляет носимому устройству 108 возможность поддерживать связь с другими системами или компонентами, такими как диспетчер 104 связи в одном или более разных транспортных средств. Процессор 304 выполняет различные команды для реализации функциональных возможностей, предусмотренных носимым устройством 108. Процессор 304 может включать в себя любой тип процессора общего применения или специального назначения для приведения в исполнение управляющих программ или команд. Память 306 хранит эти команды, а также другие данные, используемые процессором 304 или другими модулями, содержащимися в носимом устройстве 108. Дополнительно, память 306 может хранить другую информацию, такую как параметры связи, и тому подобное.
Носимое устройство 108 также включает в себя модуль 308 определения близости, который определяет, когда носимое устройство 108 находится в пределах предопределенного расстояния от транспортного средства 102. Как упомянуто выше, имеются в распоряжении различные технологии для определения приблизительного расстояния между двумя устройствами, обменивающимися информацией друг с другом беспроводным образом. Примерное предопределенное расстояние составляет приблизительно 25 футов, хотя предопределенное расстояние может быть любым значением, до тех пор, пока носимое устройство 108 и транспортное средство 102 находятся в пределах дальности действия связи друг от друга. В одном из вариантов осуществления, транспортное средство 102 имеет больший источник питания, а потому, передает сообщения начальной идентификации на носимое устройство 108 для установления начальной связи между двумя устройствами.
Диспетчер 310 энергии определяет, находится ли носимое устройство 108 в активном режиме или в энергосберегающем режиме, на основании близости носимого устройства 108 к одному или более транспортных средств. Диспетчер 310 энергии переводит носимое устройство 108 в энергосберегающий режим, когда поблизости нет транспортных средств, для сбережения энергии, запасенной в аккумуляторной батарее 314. Когда транспортные средства отсутствуют, носимому устройству 108 не требуется передавать информацию касательно присутствия носимого устройства. Когда обнаружено транспортное средство, носимое устройство 108 переключается в активный режим для уведомления транспортного средства о животном в зоне. Генератор 312 на кинетической энергии преобразует кинетическую энергию животного (или другого объекта, носящего носимое устройство 108) в электрическую энергию. В альтернативных вариантах осуществления, любой тип системы зарядки или технологии зарядки может использоваться для выработки электричества и зарядки аккумуляторной батареи 314. Диспетчер 310 энергии также может определять, использовать ли электрическую энергию, вырабатываемую генератором 312 на кинетической энергии, для зарядки аккумуляторной батареи 314. Носимое устройство 108 также включает в себя адрес 316 Bluetooth, который уникально идентифицирует носимое устройство.
Фиг. 4 - блок-схема последовательности операций способа, изображающая вариант осуществления способа 400 для уведомления водителя о животном (например, домашнем животном), расположенном рядом с транспортным средством. В начале, носимое устройство выявляет транспортное средство в пределах предопределенного расстояния на 402. В некоторых вариантах осуществления, носимое устройство образует пару с транспортным средством, когда они заходят в пределы дальности действия широковещательной передачи друг от друга. В конкретных реализациях, сигналы между носимым устройством и транспортным средством могут пересылаться через многочисленные устройства ячеистой сети для увеличения эффективной дальности действия широковещательной передачи. В некоторых вариантах осуществления, носимое устройство выявляет многочисленные транспортные средства, все из которых находятся в пределах предопределенного расстояния от носимого устройства. По обнаружению транспортного средства в пределах предопределенного расстояния, носимое устройство переключается в активный режим 404. По вводу в действие, носимое устройство может отправлять на транспортное средство сигнал ввода в действие, указывающий, что носимое устройство является действующим в настоящий момент. Во время работы в активном режиме, носимое устройство отправляет сигнал Bluetooth на транспортное средство на 406. Сигнал Bluetooth может включать в себя многообразие данных, таких как время передачи, чтобы сигнал проходил между носимым устройством и транспортным средством, информация, связанная с домашним животным (например, кличка домашнего животного, имя владельца, контактная информация владельца), и идентифицирует источник сигнала в качестве носимого устройства, несомого животным. Владелец домашнего животного может ограничивать типы информации, передаваемой между носимым устройством и транспортным средством.
В некоторых вариантах осуществления, транспортное средство отправляет текстовое сообщение (или другой тип сообщения) владельцу домашнего животного, связанному с носимым устройством, на 408. Например, процессор в транспортном средстве может идентифицировать владельца, связанного с носимым устройством, на основании адреса Bluetooth, связанного с носимым устройством. С использованием адреса Bluetooth, процессор может осуществлять доступ к базе данных владельцев и идентифицировать информацию профиля для владельца конкретного носимого устройства. Информация профиля включает в себя адреса сообщений (например, текстовый адрес или адрес электронной почты), которые процессор в транспортном средстве может использовать для отправки сообщения владельцу домашнего животного. Дополнительно, процессор может определять приблизительное местоположение транспортного средства с помощью триангуляции других сигналов/устройств Bluetooth. Например, в Интернете вещей (IoT), любое количество устройств Bluetooth могут поддерживать связь друг с другом. В этой ситуации, местоположение транспортного средства (или носимого устройства) может определяться относительно местонахождения домашнего животного, вместо определения фиксированного географического местоположения, такого как предоставляемое посредством GPS.
В других вариантах осуществления, процессор в транспортном средстве может определять приблизительное местоположение транспортного средства с использованием системы GPS, установленной в транспортном средстве. Информация о местоположении транспортного средства может быть включена в сообщение, отправляемое владельцу домашнего животного, так чтобы владелец домашнего животного мог определять местонахождение своего домашнего животного. Владелец домашнего животного может быть водителем или пассажиром в транспортном средстве. В качестве альтернативы, владелец домашнего животного может быть расположен в месте, которое находится на отдалении от текущего местоположения транспортного средства.
Способ 400 также, на 410, мигает символом «рядом домашнее животное» (или другим графическим индикатором) на приборной панели транспортного средства, информационно-развлекательной системе или другом механизме отображения, чтобы предупреждать водителя о животном поблизости от транспортного средства. Это уведомление предоставляет водителю возможность быть более осмотрительным и наблюдать за животным. В других вариантах осуществления, звуковые предупреждения и/или другие визуальные предупреждения выдаются водителю транспортного средства.
Если носимое устройство остается в пределах предопределенного расстояния, на 412, система продолжает мигание символом «рядом домашнее животное» на приборной панели транспортного средства, на 414. Однако, если носимое устройство перемещается за пределы предопределенного расстояния, на 412, то носимое устройство переключается в энергосберегающий режим, на 416, так как в зоне нет транспортных средств, которые необходимо предупреждать о наличии животного, носящего носимое устройство.
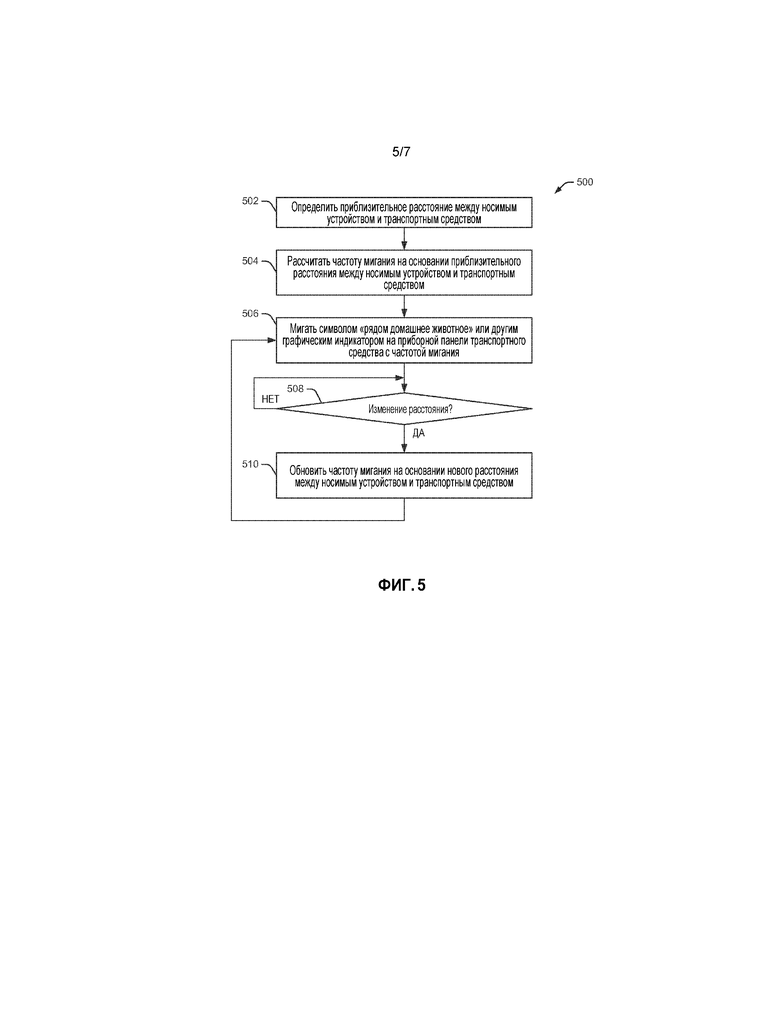
Фиг. 5 - блок-схема последовательности операций способа, изображающая вариант осуществления способа 500 для определения частоты мигания символа «домашнее животное поблизости» на приборной панели транспортного средства. В начале, способ 500 определяет приблизительное расстояние между носимым устройством и транспортным средством, на 502. На основании приблизительного расстояния между носимым устройством и транспортным средством, способ 500 рассчитывает частоту мигания (для мигания символом «рядом домашнее животное»), на 504. В некоторых вариантах осуществления, частота мигающего символа возрастает по мере того, как убывает приблизительное расстояние между носимым устройством и транспортным средством. В различных вариантах осуществления, частота мигающего символа может рассчитываться с использованием гладкой функции или в виде ступенчатой функции, например, реализованной с помощью справочной таблицы. Дополнительно, технология расчета частоты может учитывать относительное расстояние между носимым устройством и транспортным средством, а также показатель близости между носимым устройством и транспортным средством.
В других вариантах осуществления, другие типы предупреждений (например, звуковые предупреждения) выдаются водителю транспортного средства, чтобы указывать наличие животного рядом с транспортным средством. Предупреждение, выдаваемое водителю, может иметь меняющиеся уровни интенсивности, основанные на расстоянии между транспортным средством и носимым устройством. Например, уровень интенсивности может возрастать, по мере того, как расстояние между транспортным средством и носимым устройством убывает. В качестве используемой в материалах настоящей заявки, частота мигания символом «рядом домашнее животное» представляет собой один из примеров уровня интенсивности.
Способ 500 продолжается по мере того, как он мигает, на 506, символом «рядом домашнее животное» или другим графическим индикатором на приборной панели транспортного средства с рассчитанной частотой мигания. Если приблизительное расстояние между носимым устройством и транспортным средством не изменялось на 508, символ «рядом домашнее животное» продолжает мигать с прежней частотой. Однако, если расстояние между носимым устройством и транспортным средством меняется, способ обновляет частоту мигания, на 510, на основании нового расстояния между носимым устройством и транспортным средством.
В альтернативных вариантах осуществления, уровень громкости слышимого звука меняется на основании приблизительного расстояния между носимым устройством и транспортным средством. Например, уровень громкости слышимого звука возрастает, по мере того как убывает приблизительное расстояние между носимым устройством и транспортным средством.
Фиг. 6 - блок-схема последовательности операций способа, изображающая вариант осуществления способа 600 для определения местоположения животного, имеющего носимое устройство. В примере по фиг. 6, носимое устройство поддерживает связь с многочисленными транспортными средствами, каждое из которых может передавать информацию о приблизительном местоположении владельца животного, носящего носимое устройство. В начале, носимое устройство обменивается информацией с первым транспортным средством с помощью сигнала Bluetooth, на 602. То же самое носимое устройство также обменивается информацией со вторым транспортным средством с помощью сигнала Bluetooth, на 604. Первое транспортное средство определяет приблизительное расстояние между носимым устройством и первым транспортным средством на 606. Способ 600 продолжается, по мере того как первое транспортное средство отправляет текстовое сообщение (или другое сообщение) владельцу животного, связанному с носимым устройством, включающее в себя приблизительное местонахождение животного, на 608. Приблизительное местонахождение животного может определяться с использованием GPS в первом транспортном средстве или любой другой системы, способной определять приблизительное географическое местоположение.
Способ 600 продолжается, по мере того как второе транспортное средство определяет приблизительное расстояние между носимым устройством и вторым транспортным средством, на 610. Второе транспортное средство отправляет текстовое сообщение (или другое сообщение) владельцу животного, связанному с носимым устройством, включающее в себя приблизительное местонахождение животного на 612. Приблизительное местонахождение животного может определяться с использованием GPS во втором транспортном средстве или любой другой системы, способной определять приблизительное географическое местоположение. Первое и второе транспортные средства продолжают принимать сигналы Bluetooth с носимого устройства и определять приблизительные расстояния до носимого устройства, на 614. Если изменение расстояния выявлено, на 616, способ возвращается на 606 для определения новых расстояний.
Способ по фиг. 6 полезен для помощи владельцу животного определять местонахождение потерянного или пропавшего животного. Принимая текстовые сообщения с многочисленных транспортных средств, владелец животного может быстрее определять местонахождение животного. Хотя в этом примере обсуждаются два транспортных средства, альтернативные варианты осуществления могут включать в себя любое количество транспортных средств, поддерживающих связь с носимым устройством. Дополнительно, если одно из транспортных средств уезжает от животного (за пределы дальности действия сигнала Bluetooth), оставшееся транспортное средство(а) может продолжать поддерживать связь с носимым устройством и отправлять текстовые сообщения владельцу животного.
Фиг. 7 - блок-схема последовательности операций способа, изображающая вариант осуществления способа 700 для выявления подверженного риску животного в транспортном средстве. В начале, система транспортного средства выявляет носимое устройство внутри транспортного средства, на 702. Система транспортного средства может быть любым типом из системы управления транспортным средством, информационно-развлекательной системы, навигационной системы и тому подобного. В некоторых вариантах осуществления, система транспортного средства включает в себя многочисленные компоненты, устройства, подсистемы и тому подобное. Система транспортного средства определяет, движется ли транспортное средство, на 704. Дополнительно, система транспортного средства определяет внутреннюю температуру (то есть, температуру внутри транспортного средства) и внешнюю температуру (то есть, температуру вне транспортного средства), на 706. Система транспортного средства дополнительно определяет, открыты или закрыты (либо частично открыты) окна транспортного средства, на 708, и определяет, присутствует ли водитель (или другой человек) в транспортном средстве, на 710.
Способ 700 продолжается по мере того, как система транспортного средства определяет, покинул ли водитель транспортное средство недавно, на 712. Это определение также может включать в себя идентификацию любых других людей в транспортном средстве. Система транспортного средства может выявлять покидание водителем транспортного средства на основании открывания и закрывания водительской двери, запирания дверей и перемещения брелока для ключей, связанного с водителем, прочь от транспортного средства.
На основании многочисленных определений, способ 700 определяет, находится ли животное в транспортном средстве под угрозой, на 714. Например, если животное обнаружено в транспортном средстве на основании наличия носимого устройства, внутренняя температура находится на угрожающе высоких уровнях, и в транспортном средстве нет людей, способ может определять, что животное в транспортном средстве находится под угрозой. Если животное не находится под угрозой, система транспортного средства продолжает контроль, на 716, многочисленных параметров, обсужденных на 702-712. Если животное находится под угрозой, система транспортного средства отправляет сообщение (например, текстовое сообщение или другое предупреждение) владельцу, связанному с носимым устройством, на 718. Сообщение может включать в себя подробности об угрозе животному, такой как нахождение животного в одиночестве в транспортном средстве при высоких температурах. Это может предупреждать владельца, который нечаянно оставил своего животного в транспортном средстве, или который не осознавал повышающуюся температуру в транспортном средстве. В некоторых вариантах осуществления, система транспортного средства может отправлять сообщение работникам службы по контролю за животными или правоохранительных органов, чтобы оповещать их о животном под угрозой, включающее в себя местонахождение животного и имя владельца.
Хотя настоящее изобретение описано в показателях определенных предпочтительных вариантов осуществления, другие варианты осуществления будут очевидны рядовым специалистам в данной области техники, при условии выгоды данного изобретения, в том числе, варианты осуществления, которые не предусматривают всех из выгод и признаков, изложенных выше в материалах настоящей заявки, которые также находятся в объеме этого изобретения. Должно быть понятно, что могут быть использованы другие варианты осуществления, не выходя из объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ О ПРИБЛИЖЕНИИ ЖИВОТНЫХ К ТРАНСПОРТНОМУ СРЕДСТВУ И ТРАНСПОРТНОЕ СРЕДСТВО, ИСПОЛЬЗУЮЩЕЕ ЕГО | 2015 |
|
RU2710297C2 |
| ОЦЕНКА И ШИРОКОВЕЩАТЕЛЬНАЯ ПЕРЕДАЧА ПОКАЗАТЕЛЯ ОТВЕТСТВЕННОСТИ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2722320C2 |
| ОПРЕДЕЛЕНИЕ МЕСТОНАХОЖДЕНИЯ КНОПКИ БАГАЖНИКА ДЛЯ КОНЕЧНОГО ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2680370C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ОБ ОБЪЕКТЕ В ТРАНСПОРТНОМ СРЕДСТВЕ (ВАРИАНТЫ) | 2016 |
|
RU2706888C2 |
| СПОСОБ ДЛЯ КАЛИБРОВКИ ДАТЧИКОВ ТРАНСПОРТНОГО СРЕДСТВА С ИСПОЛЬЗОВАНИЕМ ПРИСОЕДИНЕННЫХ К БЕСПРОВОДНОЙ СЕТИ ДАТЧИКОВ, СООТВЕТСТВУЮЩИЕ ТРАНСПОРТНОЕ СРЕДСТВО И МАТЕРИАЛЬНЫЙ МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2017 |
|
RU2699328C2 |
| СИСТЕМЫ И СПОСОБЫ ВОДИТЕЛЯ ПО ЗАПРОСУ | 2017 |
|
RU2741521C2 |
| НАСТРАИВАЕМАЯ ОТЧЕТНОСТЬ С ПОМОЩЬЮ НОСИМОГО УСТРОЙСТВА | 2015 |
|
RU2735112C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ВОЗМОЖНОСТЬЮ ОТСЛЕЖИВАНИЯ МОБИЛЬНОГО УСТРОЙСТВА ДЛЯ УПРАВЛЕНИЯ ПОДСИСТЕМАМИ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2700329C2 |
| КОНФИГУРИРОВАНИЕ НОСИМОГО УСТРОЙСТВА С ПОМОЩЬЮ ДАННЫХ ТРАНСПОРТНОГО СРЕДСТВА И ОБЛАЧНЫХ ДАННЫХ О СОБЫТИИ | 2015 |
|
RU2700945C1 |
| ОПОВЕЩЕНИЕ О ЗАБЫТОМ МОБИЛЬНОМ УСТРОЙСТВЕ | 2015 |
|
RU2704616C1 |


Изобретение относится к системам и способам для обнаружения животного поблизости от транспортного средства. Технический результат - обеспечение безопасности движения. В одной из реализаций, носимое устройство, несомое животным, вводится в действие, когда носимое устройство находится в пределах предопределенного расстояния от транспортного средства. Транспортное средство принимает сигнал с носимого устройства и определяет приблизительное расстояние между носимым устройством и транспортным средством. Предупреждение формируется для предупреждения водителя, что животное находится рядом с транспортным средством. Предупреждение имеет уровень интенсивности, который соответствует приблизительному расстоянию между носимым устройством и транспортным средством. 2 н. и 7 з.п. ф-лы, 7 ил.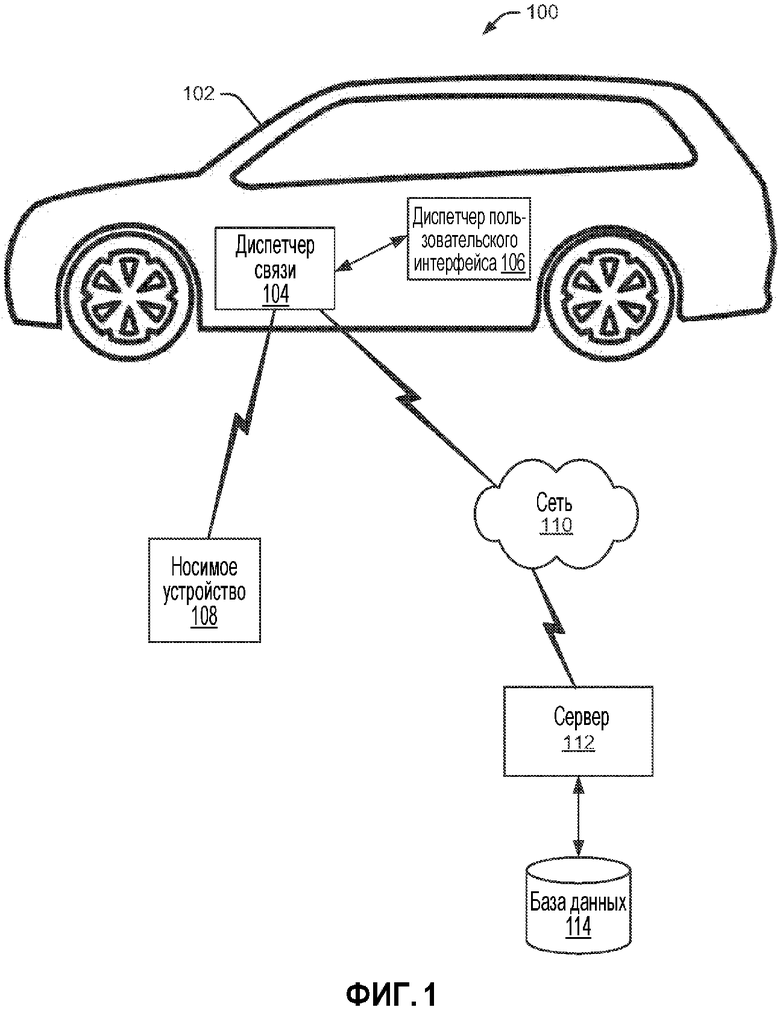
1. Способ отслеживания животного, состоящий в том, что:
принимают, транспортным средством, сигнал с носимого устройства, при этом сигнал включает в себя идентификационный код, связанный с носимым устройством, и при этом сигнал указывает, что носимое устройство носится животным;
определяют, с использованием одного или более процессоров, приблизительное местоположение транспортного средства;
определяют, с использованием одного или более процессоров, пользователя, связанного с идентификационным кодом; и
передают, с использованием одного или более процессоров, сообщение пользователю, связанному с идентификационным кодом, при этом сообщение включает в себя приблизительное местоположение транспортного средства и уведомляет пользователя, что носимое устройство было выявлено рядом с приблизительным местоположением транспортного средства.
2. Способ по п. 1, в котором принятый сигнал является сигналом Bluetooth, а идентификационный код является адресом Bluetooth.
3. Способ по п. 1, дополнительно состоящий в том, что выводят из работы носимое устройство, когда носимое устройство находится за пределами предопределенного расстояния от транспортного средства.
4. Способ по п. 1, дополнительно состоящий в том, что:
принимают, вторым транспортным средством, сигнал от носимого устройства;
определяют, с использованием одного или более процессоров, приблизительное местоположение второго транспортного средства; и
передают, с использованием одного или более процессоров, второе сообщение пользователю, связанному с идентификационным кодом, при этом второе сообщение включает в себя приблизительное местоположение второго транспортного средства и уведомляет пользователя, что носимое устройство было выявлено рядом с приблизительным местоположением второго транспортного средства.
5. Способ по п. 1, дополнительно состоящий в том, что выводят из работы носимое устройство, когда носимое устройство находится за пределами предопределенного расстояния от транспортного средства.
6. Транспортное средство, содержащее:
модуль связи, выполненный с возможностью принимать сигнал ввода в действие от носимого устройства, несомого животным, при этом сигнал ввода в действие принимается, когда устройство находится в пределах предопределенного расстояния от транспортного средства;
модуль определения близости, выполненный с возможностью определять приблизительное расстояние между носимым устройством и транспортным средством;
процессор, выполненный с возможностью формировать предупреждение водителю транспортного средства на уровне интенсивности, который соответствует приблизительному расстоянию между носимым устройством и транспортным средством;
диспетчер пользовательского интерфейса, выполненный с возможностью представлять предупреждение водителю транспортного средства с уровнем интенсивности, при этом предупреждение указывает присутствие животного поблизости от транспортного средства; и
диспетчер идентификации домашнего животного, выполненный с возможностью:
определять идентификационный код, связанный с сигналом ввода в действие;
определять пользователя, связанного с идентификационным кодом; и
передавать сообщение пользователю, уведомляющее пользователя о приблизительном местонахождении животного.
7. Транспортное средство по п. 6, в котором предупреждение является мигающим символом, который мигает с частотой, основанной на расстоянии между носимым устройством и транспортным средством.
8. Транспортное средство по п. 6, в котором предупреждение является слышимым звуком, имеющим уровень громкости, который меняется на основании расстояния между носимым устройством и транспортным средством.
9. Транспортное средство по п. 6, дополнительно содержащее диспетчер GPS (глобальной системы определения местоположения), выполненный с возможностью определять приблизительное географическое местоположение транспортного средства.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| КРЫЛО САМОЛЕТА | 2024 |
|
RU2840556C1 |
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2001 |
|
RU2217797C2 |

