Изобретение относится к радиационной технике, а именно, к радиологическим системам визуализации и используется для позиционирования рентгеновской трубки и детектора относительно гантри комплекса лучевой терапии.
Все современные комплексы лучевой терапии оснащаются системами рентгеновской визуализации, позволяющими проводить процедуры лучевой терапии с контролем по изображению - ЛТКИ. Использование такого рода методики позволяет существенно повысить качество проведения лучевой терапии.
Системы рентгеновской визуализации основываются на использовании рентгеновской трубки и плоскопанельного детектора. Создаваемое трубкой рентгеновское излучение проходит через пациента и регистрируется детектором. На основе зарегистрированного изображения верифицируется положение пациента.
Одной из основных проблем для такого рода систем является позиционирование рентгеновской трубки и детектора. Ввиду высоких требований, предъявляемых к качеству изображения, существенной является высокая геометрическая точность позиционирования компонент систем визуализации. Большое значение имеют не только абсолютная точность позиционирования, но и воспроизводимость, так как незначительные отклонения трубки или детектора могут вызвать существенные искажения в получаемых изображениях, а это, в свою очередь, может привести к ошибке позиционирования пациента и переоблучению здоровых органов и тканей.
Дополнительным осложняющим фактором в выборе конструкции устройства позиционирования является условие необходимости вращения системы рентгеновской визуализации относительно горизонтальной оси Г-образного гантри ускорителя.
Существуют различные способы, позволяющие позиционировать рентгеновскую трубку и детектор в аппаратах лучевой терапии.
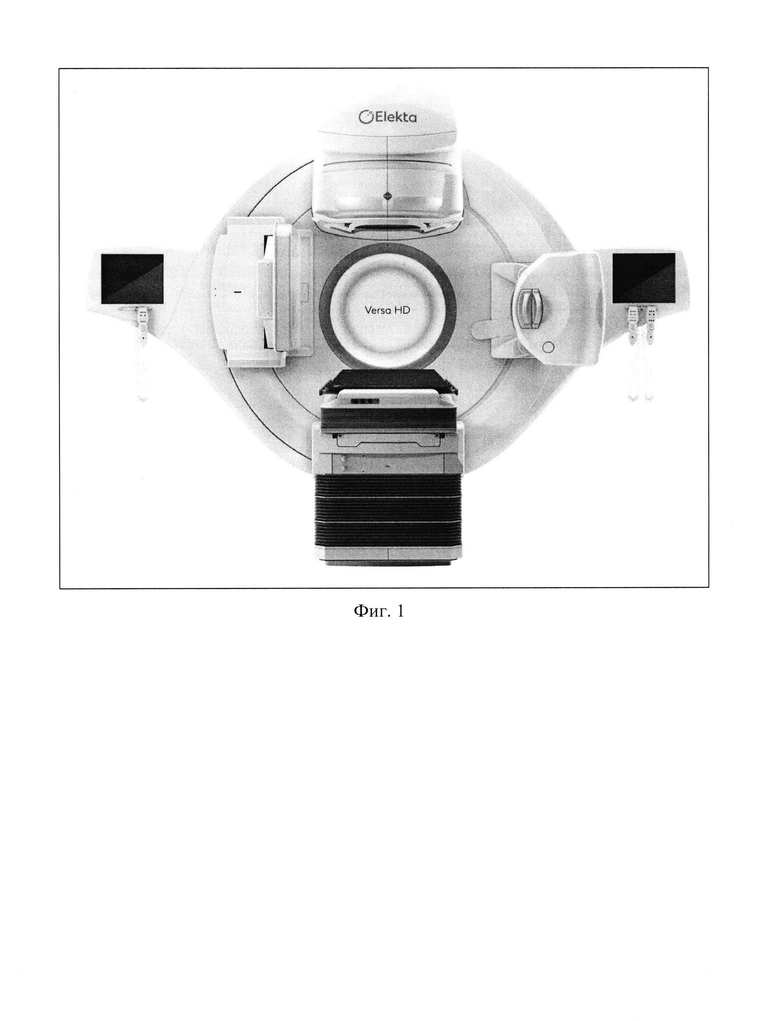
Один из предлагаемых вариантов реализован на комплексах лучевой терапии производства фирмы Elekta, АВ (Фиг. 1).
Особенностями системы является использование барабанной конструкции устройства гантри, т.е. все основные компоненты комплекса вращаются совместно на единой раме. Это позволяет упростить механизм выдвижения рентгеновской трубки и детектора. Рентгеновская трубка выдвигается с помощью двух цилиндрических направляющих, при этом выдвижение и задвижение происходит вручную.
Преимуществом такого типа выдвижения является достаточно высокая воспроизводимость позиционирования. За счет большого расстояния между направляющими люфты являются незначительными и не вносят существенного разброса в нестабильность позиционирования рентгеновской трубки.
В дополнение к сказанному такая система является сравнительно простой и требует лишь точного изготовления направляющих и соосного выставления цилиндрических направляющих. Таким образом, схема выдвижения рентгеновской трубки в аппаратах фирмы Elekta является простой и относительно недорогой. Однако стоит учесть, что данный механизм является не автоматизированным, что приводит к необходимости задвигать и выдвигать трубку вручную. В условиях рутинных работ в клинике этот фактор увеличивает время, затрачиваемое на одного пациента, что приводит к уменьшению пропускной способности аппарата.
Что касается выдвижения плоскопанельного детектора, в аппаратах фирмы Elekta реализовано механизированное выдвижение.
Позиционирование детектора происходит за счет перемещения по двум осям. Первое перемещение - вращательное, детектор вращается примерно на 90 градусов и становится в плоскость, перпендикулярную оси пучка рентгеновского излучения. Второе перемещение - линейное, при котором центр детектора совпадает с осью пучка излучения.
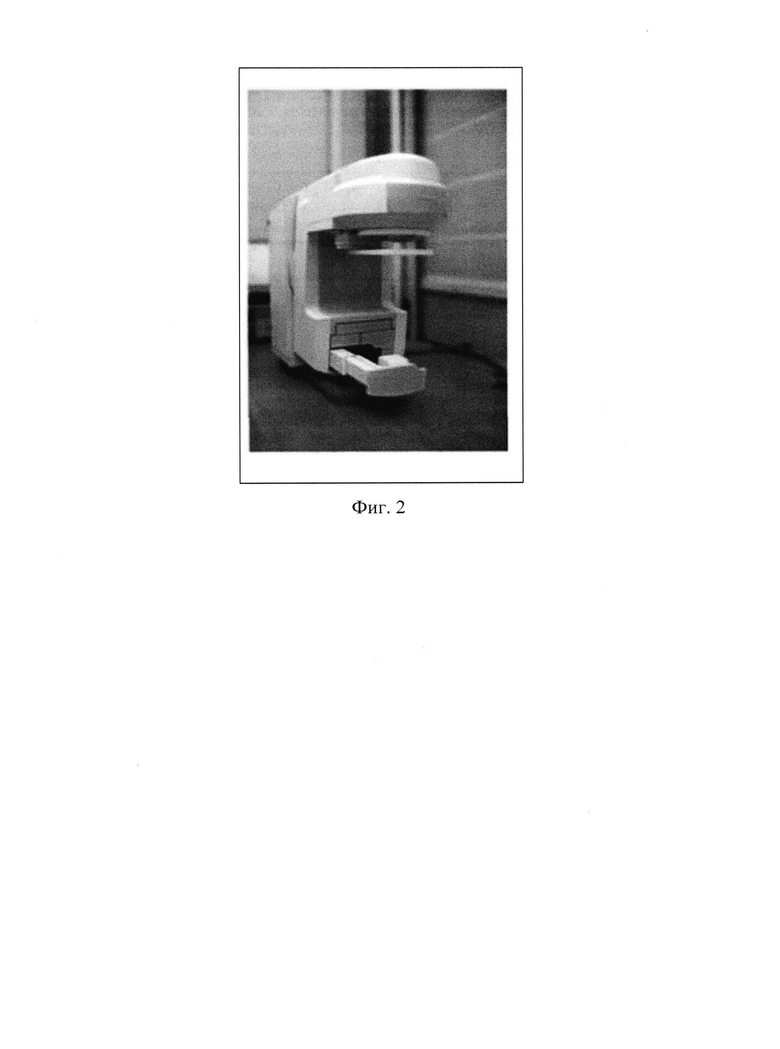
Существует решение по позиционированию плоскопанельного детектора и рентгеновской трубки, предложенное в аппаратах Siemens Artiste® (Фиг. 2). Отличительной особенностью системы является то, что ось пучка излучения совпадает с осью терапевтического пучка от ускорителя. При этом рентгеновская трубка находится напротив источника терапевтического излучения.
Выдвижение рентгеновской трубки происходит с помощью телескопического кронштейна. Система позиционирования плоскопанельного детектора реализована по более сложной схеме. Из исходного положения детектор в первую очередь выполняет вертикальное смещение, а затем за счет двух ротационных движений детектор устанавливается перпендикулярно пучку рентгеновского излучения.
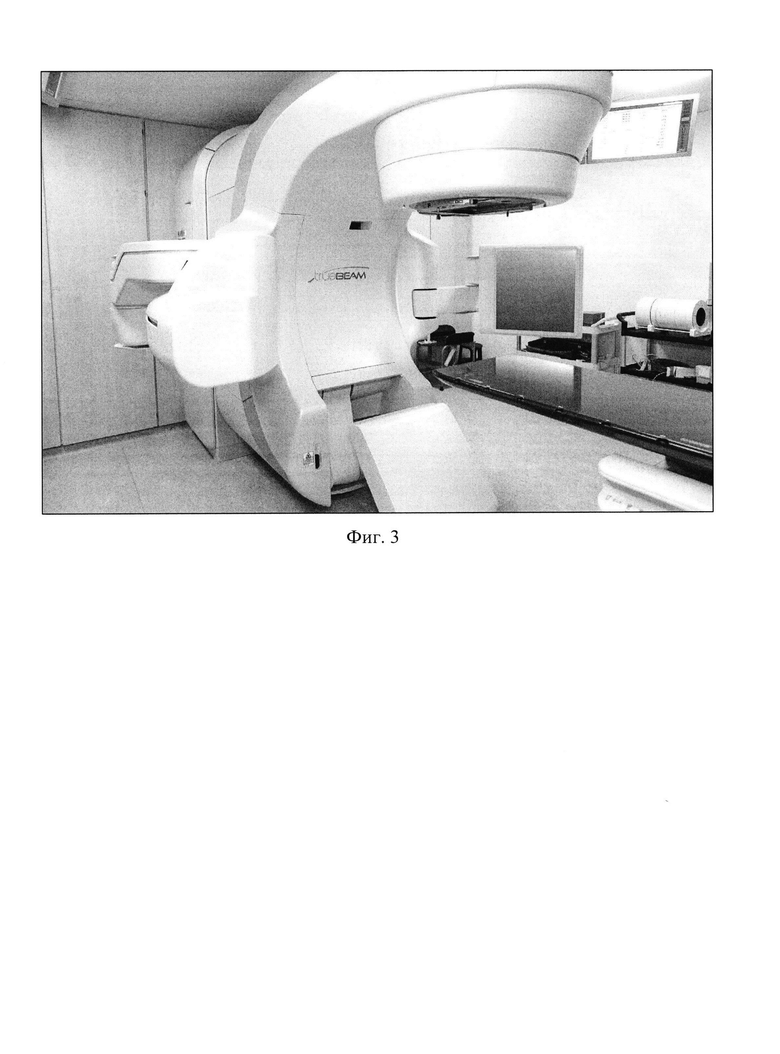
За прототип взята система On-Board Imaging - OBI, используемая в комплексах Varian TrueBeam, Clinac и др. (https://www.varian.com/products/radiotherapv/treatment-delivery/truebeam). В OBI используются роботизированные механические системы перемещения или так называемые "руки", основанные на многосуставном механизме складывания (Фиг. 3). Такой способ позиционирования позволяет выставить трубку и детектор в требуемом положении в полностью автоматическом режиме и независимо друг относительно друга.
Исходя из представленной схемы видно, что каждая из "рук" состоит из трех "суставов", в которых происходит вращение, за счет чего смещается трубка или детектор. Таким образом, вся система перемещения содержит шесть двигателей. Для каждого из двигателей имеется двойная система контроля положения, обеспечивающая выполнение требований безопасности. Ввиду относительно высокой вероятности столкновения "рук" с другими компонентами комплекса (гантри, столом и пр.) требуется отслеживать траекторию движения "рук", что влечет за собой усложнение в системе управления.
Недостатками данного прототипа являются:
- большое количество двигателей - 6, приводящее к необходимости использовать большое количество датчиков положения - энкодеров;
- необходимость отслеживания траектории движения для предотвращения столкновений, что приводит к использованию дорогостоящих энкодеров с памятью положения.
Целью данного изобретения является уменьшение количества используемых приводов для упрощения конструкции перемещения и повышения точности позиционирования компонент систем рентгеновской визуализации.
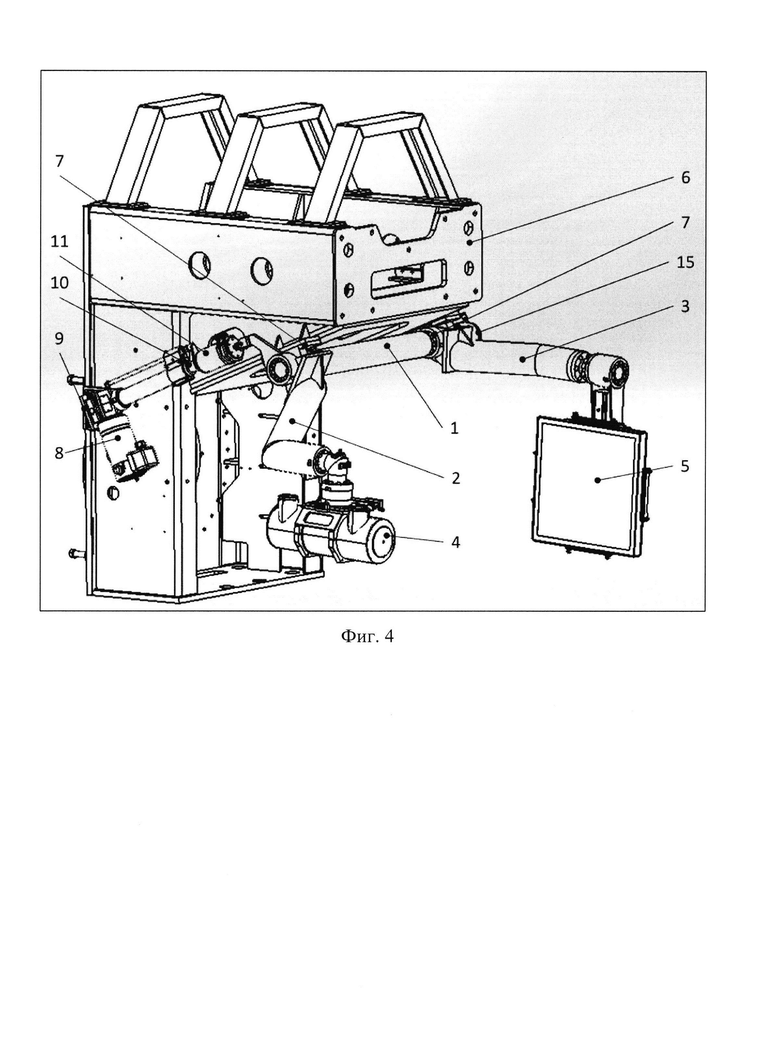
Указанный технический результат устройства позиционирования рентгеновской трубки и плоскопанельного детектора в системе рентгеновской визуализации комплекса лучевой терапии, включающего механизм позиционирования, достигается за счет того, что рентгеновская трубка и плоскопанельный детектор крепятся на общее основание и перемещаются взаимно. Схематическое изображение механизма позиционирования представлено на Фиг. 4.
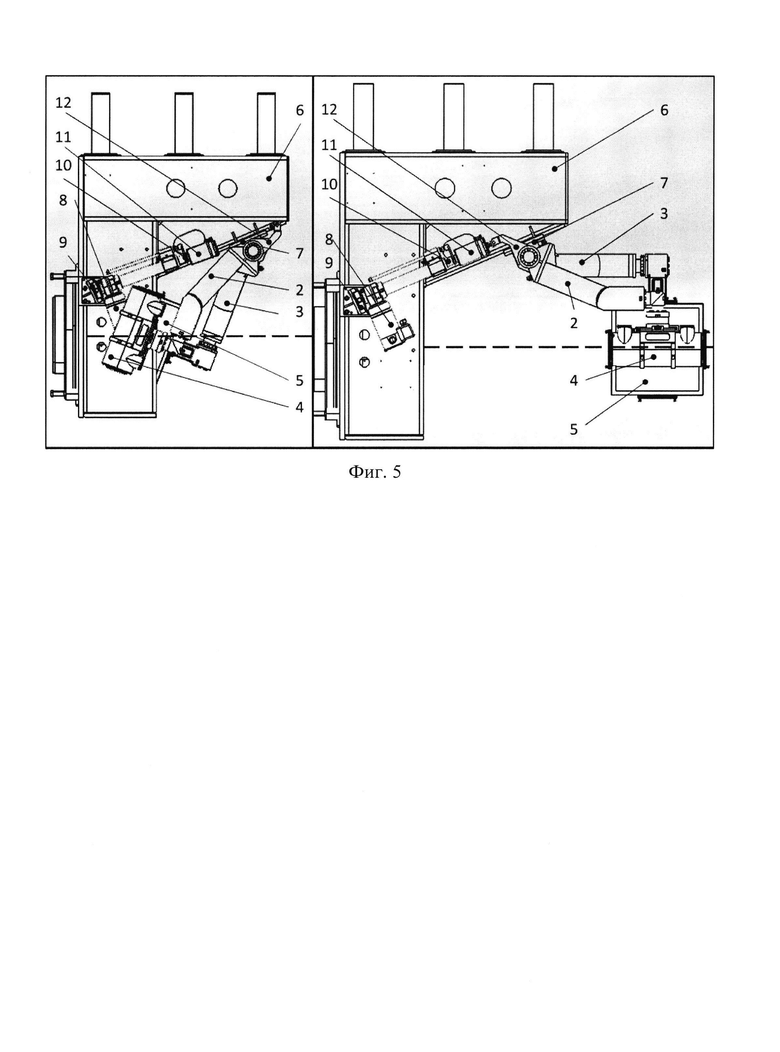
Механизм позиционирования представляет собой кронштейн, состоящий из трех основных частей - центральный держатель (1), к которому прикреплены держатель рентгеновской трубки (2), держатель плоскопанельного детектора (3). Все три держателя между собой соединены, что позволяет перемещать рентгеновскую трубку (4) и плоскопанельный детектор (5) в позицию измерения одновременно за счет вращения центрального держателя (1). Позиционирование центрального держателя реализовано исходя из условия, что при крайних положениях компонент центр масс механизма с учетом массы рентгеновской трубки (4) и плоскопанельного детектора (5) находится на оси вращения Г-образного гантри ускорителя (6) (Фиг. 5). Такое условие позволяет минимизировать дисбаланс системы при вращении Г-образного гантри ускорителя (6).
Центральный держатель (1) прикреплен к Г-образному гантри ускорителя (6) через два сферических подшипника (7), равноудаленных от крайних положений вдоль оси вращения Г-образного гантри ускорителя и выполнен с возможностью приведения в движение за счет движения штока актуатора с винтовой парой с самоторможением (7). При этом сферические подшипники (7) могут быть установлены как непосредственно в силовой части Г-образного гантри ускорителя (6), так и на площадках, которые крепятся к Г-образному гантри ускорителя (6).
Движение механизма позиционирования происходит за счет работы актуатора (8). Винтовая передача актуатора (8) реализована с условием наличия самоторможения. Актуатор (8) крепится своим основанием на опору актуатора (9), выполненную в виде сферического подшипника, но также можно выполнить опору актуатора (9) в виде карданного вала (Фиг 6).
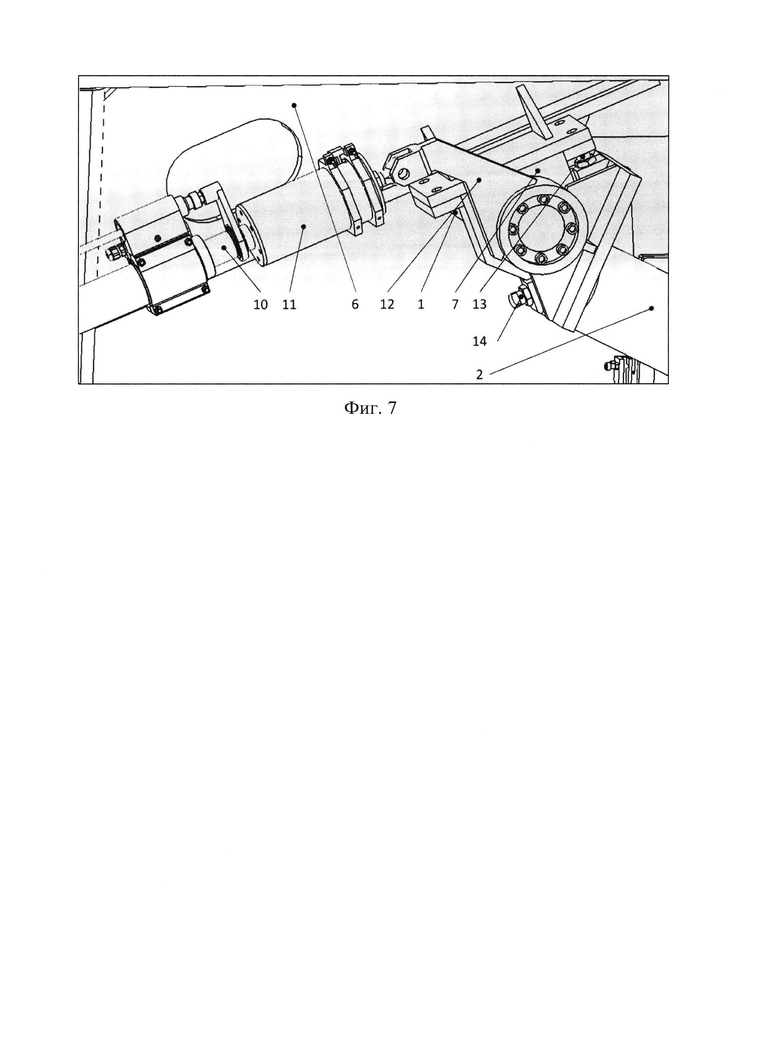
Шток актуатора (10) крепится к пружинному патрону (11), заряженному под фиксированное усилие (Фиг. 7). Наличие пружинного патрона (11) обеспечивает выборку люфтов при позиционировании механизма перемещения. Пружинный патрон (11) соединен с толкателем (12) через сферическую опору, толкатель (12) крепится к центральному держателю (1) через кронштейн. На корпус пружинного патрона устанавливаются два концевых выключателя, позволяющих регулировать степень сжатия патрона.
Использование сферических подшипников и опор позволяет минимизировать деформации конструкции, которые могут быть вызваны различными факторами, такими как, например, тепловое расширение и неточность изготовления конструкции.
На центральном держателе (1) находятся две площадки с регулируемыми упорами, по которым происходит позиционирование с поджатием пружинного патрона. Регулировка поджатия происходит за счет выставления положения концевых датчиков на корпусе пружинного патрона. Имеется два упора при позиционировании: упор в положении "измерение" (13) и упор в положении "убрано" (14).
Для контроля угла поворота центрального держателя (1) относительно Г-образного гантри ускорителя (6) используется узел контроля положения (15) с двумя каналами измерения. Для измерения угла поворота используются абсолютные энкодеры, что позволяет в случае аварийного отключения питания иметь информацию о текущем положении механизма позиционирования после подачи питания.
Использование энкодеров позволяет снижать скорость вращения центрального держателя перед приходом в упоры.
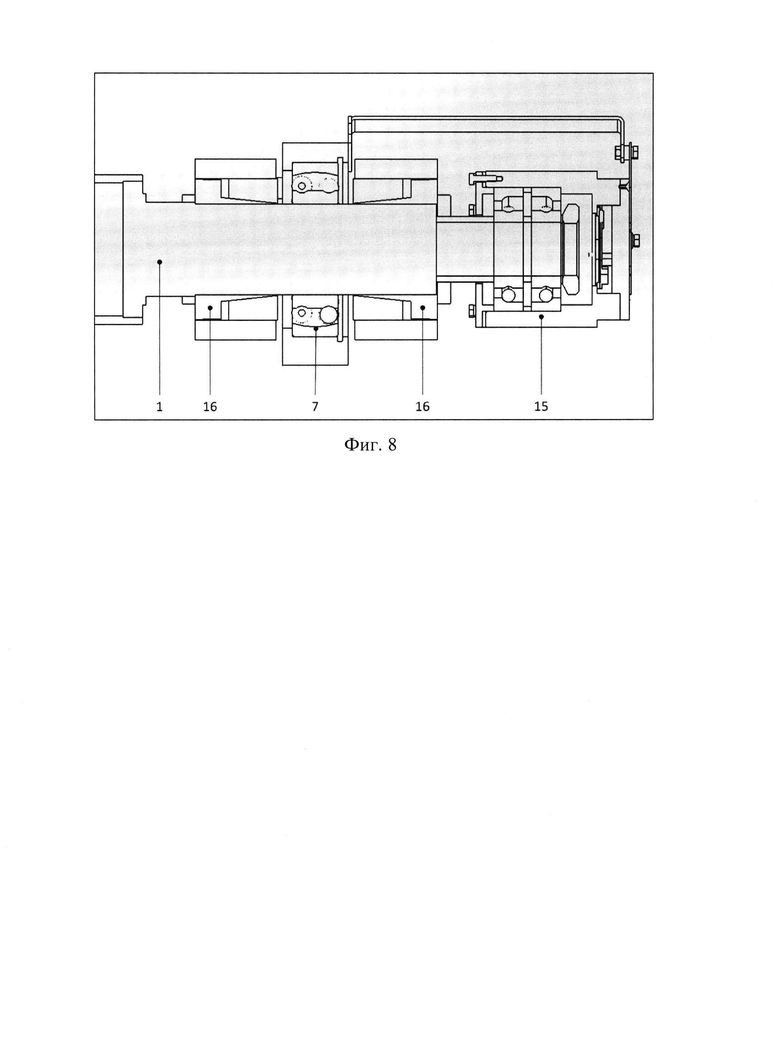
К центральному держателю (1) по разные стороны Г-образного гантри ускорителя прикреплены держатель рентгеновской трубки (2) и держатель плоскопанельного детектора (3). Механизм крепления представлен на Фиг. 8. Такой способ крепления позволяет настраивать положения держателя рентгеновской трубки (2) и держателя плоскопанельного детектора (3) относительного друг друга.
Держатель рентгеновской трубки (2) и держатель плоскопанельного детектора (3) крепятся к центральному держателю за счет зажимных элементов (16).
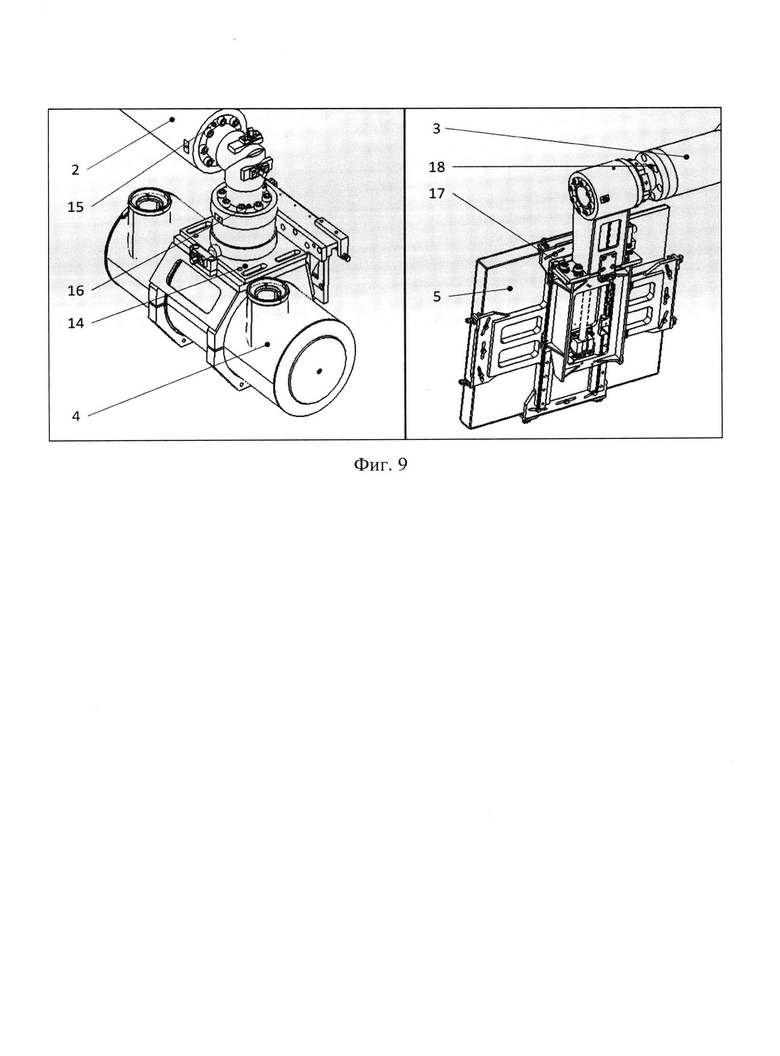
На держателе рентгеновской трубки (2) установлены механизмы юстировки, позволяющие выставлять рентгеновскую трубку (4) в требуемое положение в пространстве относительно изоцентра. Относительно системы координат рентгеновской трубки имеются следующие механизмы юстировки (Фиг. 9):
- механизм юстировки вдоль оси X (14);
- механизм юстировки вдоль оси Y (15);
- механизм юстировки вдоль оси Z (16).
На держателе плоскопанельного детектора (3) имеется механизм линейного перемещения детектора вдоль оси Z, позволяющий увеличивать поле обзора при проведении конусно-лучевой томографии. Движение детектора происходит на фиксированное расстояние, регулируемое концевыми датчиками.
На держателе плоскопанельного детектора (3) имеются следующие механизмы юстировки (в системе координат плоскопанельного детектора) (Фиг. 9):
- механизм юстировки вдоль оси X (17);
- механизм юстировки вдоль оси Y (18);
Кроме того, изобретение относится к способу позиционирования рентгеновской трубки и плоскопанельного детектора в системе рентгеновской визуализации комплекса лучевой терапии, установленных и вращающихся вместе с Г-образным гантри ускорителя относительно горизонтальной оси. При этом позиционирование проводят с использованием устройства позиционирования рентгеновской трубки и плоскопанельного детектора, содержащего механизм позиционирования, на котором закреплены рентгеновская трубка и плоскопанельный детектор и который приводится в движение за счет движения штока актуатора.
Далее описана процедура работы механизма позиционирования. В начальном состоянии, когда система находится в режиме ожидания, рентгеновская трубка и детектор находятся в положении, при котором они не мешают вращению Г-образного гантри ускорителя при любом угловом положении стола (Фиг. 5). При этом шток актуатора максимально выдвинут и сжимает пружинный патрон с усилием, при котором срабатывает концевой датчик. После прихода команды о начале движения шток актуатора начинает движение. Происходит постепенное расслабление пружинного патрона до номинальной зарядки. После этого начинается вращение центрального держателя, что приводит к перемещению рентгеновской трубки и плоскопанельного детектора.
Вращение центрального держателя происходит до момента, пока упор в положении "измерение" не дойдет до своего крайнего положения. После этого шток актуатора продолжит свое движение и начнет сжимать пружинный патрон до тех пор, пока не сработает концевой датчик. Аналогичная процедура будет происходить при движении в обратном порядке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВЕДЕНИЯ ОБЛУЧЕНИЯ ЗЛОКАЧЕСТВЕННЫХ ОПУХОЛЕЙ ПОДЖЕЛУДОЧНОЙ ЖЕЛЕЗЫ ПУЧКОМ АДРОНОВ | 2011 |
|
RU2491107C2 |
| СПОСОБ ВЫВЕДЕНИЯ БОЛЬНЫХ В ПОЛОЖЕНИЕ ОБЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210408C1 |
| СПОСОБ ПРОВЕДЕНИЯ ОБЛУЧЕНИЯ ЗЛОКАЧЕСТВЕННЫХ ОПУХОЛЕЙ ПЕЧЕНИ ПУЧКОМ АДРОНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2417804C2 |
| СПОСОБ ПРОВЕДЕНИЯ ОБЛУЧЕНИЯ ЗЛОКАЧЕСТВЕННЫХ ОПУХОЛЕЙ ЛЕГКИХ ПУЧКОМ АДРОНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2420332C2 |
| СПОСОБ ПРОВЕДЕНИЯ ОБЛУЧЕНИЯ ЗЛОКАЧЕСТВЕННЫХ ОПУХОЛЕЙ ТРАХЕИ ПУЧКОМ АДРОНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423155C2 |
| СПОСОБ ПРОВЕДЕНИЯ ОБЛУЧЕНИЯ ЗЛОКАЧЕСТВЕННЫХ ОПУХОЛЕЙ ЖЕЛУДКА ПУЧКОМ АДРОНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2424012C2 |
| СПОСОБ ПРОВЕДЕНИЯ ОБЛУЧЕНИЯ ЗЛОКАЧЕСТВЕННЫХ ОПУХОЛЕЙ ПИЩЕВОДА ПУЧКОМ АДРОНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423157C2 |
| СПОСОБ ПРОВЕДЕНИЯ ОБЛУЧЕНИЯ ЗЛОКАЧЕСТВЕННЫХ ОПУХОЛЕЙ МОЛОЧНОЙ ЖЕЛЕЗЫ ПУЧКОМ АДРОНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423156C2 |
| АППАРАТ ДЛЯ КОРПУСКУЛЯРНОЙ ЛУЧЕВОЙ ТЕРАПИИ | 2019 |
|
RU2753639C1 |
| ВИЗУАЛИЗАЦИОННОЕ НАВЕДЕНИЕ ДЛЯ РАДИАЦИОННОЙ ТЕРАПИИ | 2015 |
|
RU2671513C1 |

Группа изобретений относится к медицинской технике, к радиологическим системам рентгеновской визуализации комплексов лучевой терапии. Устройство позиционирования рентгеновской трубки и плоскопанельного детектора, в котором центральный держатель системы позиционирования располагается на гантри ускорителя и при этом равноудален от крайних положений вдоль оси вращения гантри. Центральный держатель установлен на два сферических подшипника и приводится в движение за счет работы актуатора с винтовой парой с самоторможением. Актуатор прикреплен к гантри через сферический шарнир или механизм карданного вала. Позиционирование происходит по упорам с поджатием пружинного патрона, регулировка поджатия которого происходит за счет выставления положения концевых датчиков на корпусе пружинного патрона. Контроль положения центрального держателя происходит с использованием абсолютного энкодера с двумя каналами измерения. Заявлен также способ позиционирования рентгеновской трубки и плоскопанельного детектора, являющихся частью указанного устройства позиционирования, установленных и вращающихся вместе с Г-образным гантри ускорителя относительно горизонтальной оси. При этом рентгеновская трубка и плоскопанельный детектор крепятся на общий механизм позиционирования, который приводится в движение за счет движения штока актуатора. Технический результат: уменьшение количества используемых приводов для упрощения конструкции перемещения и повышения точности позиционирования компонент систем рентгеновской визуализации. 2 н. и 2 з.п. ф-лы, 9 ил.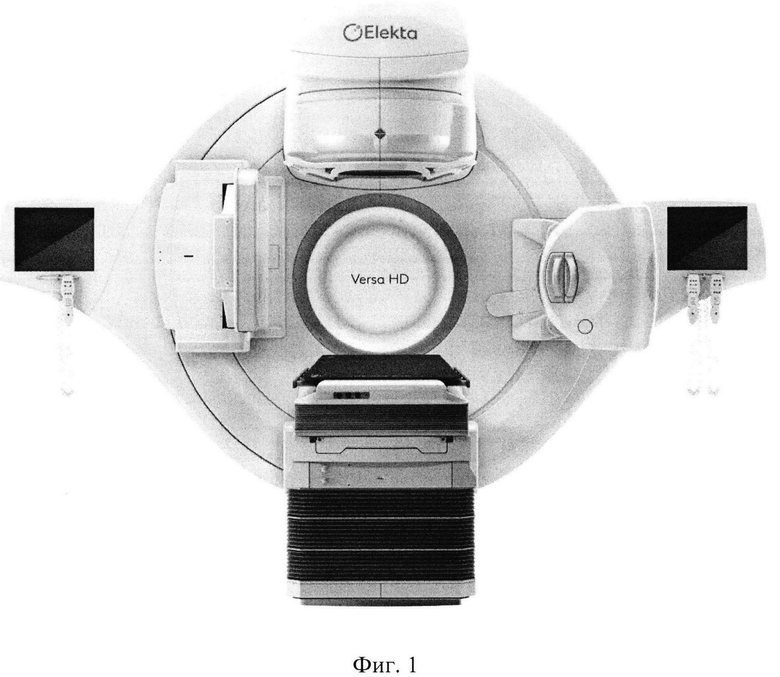
1. Устройство позиционирования рентгеновской трубки и плоскопанельного детектора в системе рентгеновской визуализации комплекса лучевой терапии, включающее механизм позиционирования, содержащий центральный держатель, к которому прикреплены держатель рентгеновской трубки и держатель плоскопанельного детектора, причем центральный держатель прикреплен к Г-образному гантри ускорителя через два сферических подшипника равноудаленно от крайних положений вдоль оси вращения Г-образного гантри и выполнен с возможностью приведения в движение за счет движения штока актуатора с винтовой парой с самоторможением, при этом актуатор прикреплен к Г-образному гантри через опору актуатора, а шток актуатора прикреплен к пружинному патрону, соединенному с толкателем, прикрепленным к центральному держателю, на центральном держателе размещены упоры, по которым происходит позиционирование с поджатием пружинного патрона, регулировка поджатия которого происходит за счет выставления положения концевых датчиков на корпусе пружинного патрона, а для контроля положения центрального держателя использован абсолютный энкодер с двумя каналами измерения.
2. Устройство по п.1, отличающееся тем, что опора актуатора выполнена в виде сферического подшипника.
3. Устройство по п.1, отличающееся тем, что опора актуатора выполнена в виде карданного вала.
4. Способ позиционирования рентгеновской трубки и плоскопанельного детектора в системе рентгеновской визуализации комплекса лучевой терапии, установленных и вращающихся вместе с Г-образным гантри ускорителя относительно горизонтальной оси, характеризующийся тем, что указанное позиционирование проводят с использованием устройства позиционирования рентгеновской трубки и плоскопанельного детектора по любому из пп.1-3, содержащего механизм позиционирования, на котором закреплены рентгеновская трубка и плоскопанельный детектор и который приводится в движение за счет движения штока актуатора.
| УСТРОЙСТВО И СПОСОБ РЕНТГЕНОВСКОГО ОБСЛЕДОВАНИЯ | 2009 |
|
RU2523827C2 |
| УЗЕЛ РУЧНОГО ПЕРЕМЕЩЕНИЯ С ПОДДЕРЖКОЙ ОТ ДВИГАТЕЛЬНОГО ПРИВОДА, РЕНТГЕНОВСКАЯ СИСТЕМА, СОДЕРЖАЩАЯ ТАКОЙ УЗЕЛ, СПОСОБ И ПРИМЕНЕНИЕ | 2010 |
|
RU2573047C2 |
| УНИВЕРСАЛЬНЫЙ РЕНТГЕНОВСКИЙ КОМПЛЕКС | 2014 |
|
RU2562013C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| ЛИНЕЙНЫЙ АКТУАТОР И ЛИНЕЙНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2018 |
|
RU2700562C1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
