Предлагаемое в качестве изобретения техническое решение относится к робототехнике, а именно к конструкции манипулятора, предназначенной для установки на основание или подвижную платформу для работы в труднодоступных и опасных для присутствия человека местах в дистанционном режиме. Работа может включать оперативно-тактические действия: обезвреживание потенциально опасных объектов с помощью устанавливаемого дополнительного оборудования различного назначения, а также решение других задач.
Известен мобильный робототехнический комплекс (МРК) (патент RU №2241594, от 07.04.03 г.) с дистанционным управлением, предназначенный для работы в экстремальных ситуациях, содержащий антропоморфный манипулятор, установленный на корпусе шасси, самоходное шасси, блоки электроавтоматики и телемеханики и пост дистанционного управления, силовое плечо манипулятора выполнено в виде жесткой пространственной рамы, состоящей из продольных щек и поперечных стяжек, и в головной части содержит активный шарнир дифференциального типа, а также разгрузочные пружины, соединяющие головную часть плеча с опорно-поворотной платформой манипулятора, и при этом активный шарнир включает неподвижное водило с сателлитами, ведущий вал-шестерню, консольный конец которого содержит цепную звездочку привода предплечья, подвижную корону с рычагом привода предплечья и подвижным блоком цепных звездочек привода кисти, и при этом в кисти манипулятора схват имеет привод перемещения губок, привод вращения схвата относительно оси симметрии губок и видеокамеру слежения за работой губок, для чего узел стыковки корпуса кисти с охватом имеет электроконтактный разъем вращающегося типа, в манипуляторе губки схвата кисти в поперечном сечении выполнены П-образной формы и имеют по всей длине неметаллические вкладыши, например из резины, толщина которых превышает высоту выступающих частей губок схвата, в манипуляторе губки схвата кисти на внешних скосах имеют фиксаторы крепления сменного инструмента, например гидроразрушителей.
Недостатками мобильного робототехнического комплекса, взятого за прототип, являются: сложная в изготовлении и сборке конструкция манипулятора, которая значительно его удорожает.
Технический результат, на решение которого направленно это техническое решение, заключается в увеличении грузоподъемности манипулятора, за счет использования простой и несложной в изготовлении и сборке конструкции, сохраняющей все ранее использованные функциональные характеристики с возможностью их улучшения. Применение нескольких насадок для различных работ по разрушению (уничтожению) подозрительных предметов на месте их обнаружения.
Технический результат достигается тем, что манипулятор робота, содержащий последовательно соединенные между собой: опорно-поворотное устройство (ОПУ) с фланцем, плечо, предплечье и рабочий орган, и снабженные индивидуальными управляемыми приводами каждого из них. При этом места сочленения ОПУ - плечо, плечо - предплечье и предплечье - рабочий орган выполнены в виде рычажного механизма с возможностью поворота вверх и вниз плеча, предплечья и рабочего органа. Привод плеча расположен с его внешней стороны, основание привода закреплено в месте сочленения ОПУ с плечом, а шток на сочленении плеча и предплечья. Внутри корпуса плеча расположен привод предплечья, основание которого закреплено на корпусе плеча, а его шток через кронштейн рычажного механизма соединен с предплечьем. Привод рабочего органа установлен внутри корпуса предплечья, его основание закреплено на корпусе предплечья, а шток соединен с кронштейном рычажного механизма предплечья. Причем на кронштейне предплечья устанавливают приспособление для крепления рабочего органа в виде шлицевого вала со стопорным элементом, при этом на рабочем органе выполняют установочное отверстие под втулку с пазами.
В качестве рабочего органа устанавливают схват, состоящий из рычажно-шарнирного механизма, закрепленного в двух щеках, съемных губок и привода, осуществляющего движение губок схвата и его ротацию.
В качестве рабочего органа устанавливают гидроразрушитель, содержащий закрепленные на основании съемные стволы, два лазерных целеуказателя, видеокамеру и элемент крепления сопла подачи жидкого азота.
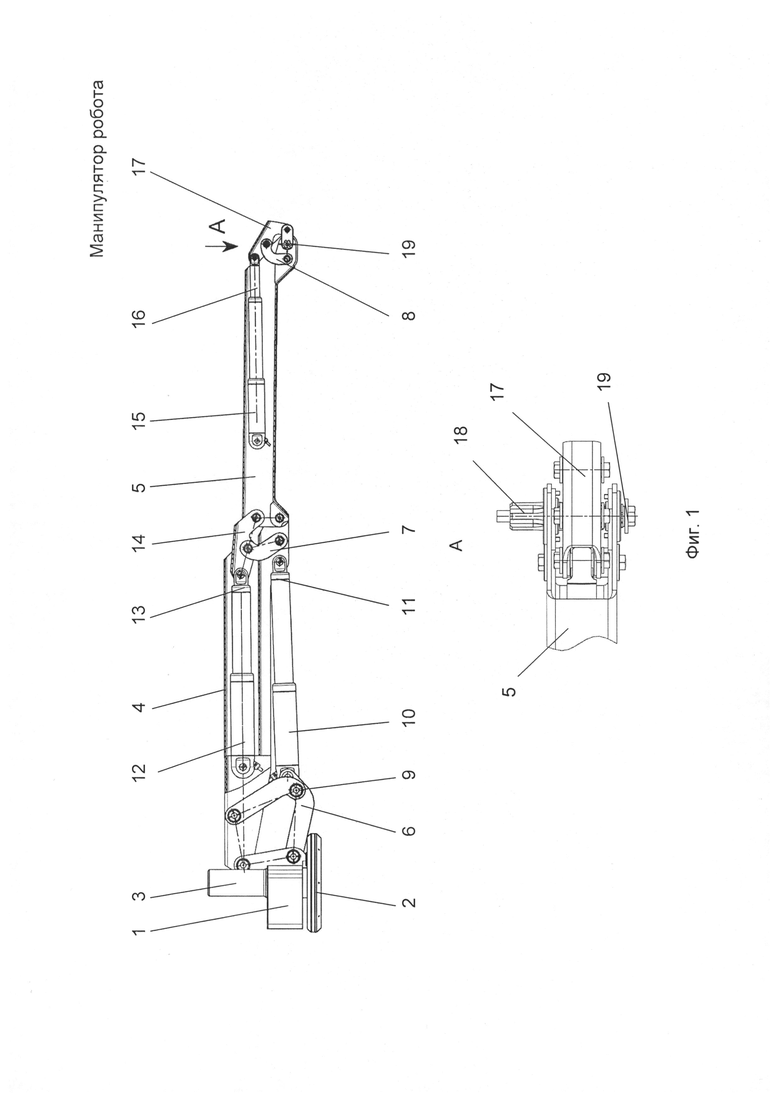
Конструкция манипулятора поясняется чертежами, где на фиг. 1 изображен чертеж манипулятора в разрезе и вид А, на фиг. 2 – схват в изометрии, на фиг. 3 – гидроразрушитель в изометрии.
Манипулятор состоит из опорно-поворотного устройства (ОПУ) 1 с фланцем 2 и приводом 3, плеча 4 и предплечья 5, которые соединены последовательно между собой через рычажные механизмы. В месте сочленения ОПУ 1 и плеча 4 - рычажный механизм 6, в месте сочленения плеча 4 и предплечья 5 рычажный механизм 7, а на предплечье 5 рычажный механизм 8. Рычажные механизмы соединены втулками 9 с возможностью поворота вверх и вниз плеча 4, предплечья 5 и рабочего органа. Все звенья манипулятора снабжены индивидуальными управляемыми приводами. Привод 10 плеча 4 расположен с его внешней стороны, основание привода 10 закреплено на рычажном механизме 6, а его шток 11 в месте сочленения плеча 4 и предплечья 5 на рычажном механизме 7 через втулочные соединения. Внутри корпуса плеча 4 расположен привод 12 предплечья 5, основание которого закреплено на корпусе плеча 4 через втулочное соединение, а его шток 13 через кронштейн 14 с предплечьем 5. Внутри корпуса предплечья 5 установлен привод 15 для рабочего органа, основание которого закреплено на корпусе предплечья 5 через втулочное соединение, а его шток 16 соединен с кронштейном 17 рычажного механизма 8. В качестве рабочего органа можно установить схват (Фиг. 2) или гидроразрушитель (Фиг. 3). На кронштейне 17 устанавливают приспособление для крепления рабочего органа в виде шлицевого вала 18 со стопорным элементом 19, например винтом. На рабочем органе (схвате и гидроразрушителе) выполняют установочное отверстие под втулку 20 с пазами, соответствующими шлицевому валу 18. Это соединение обеспечивает быструю смену рабочего органа.
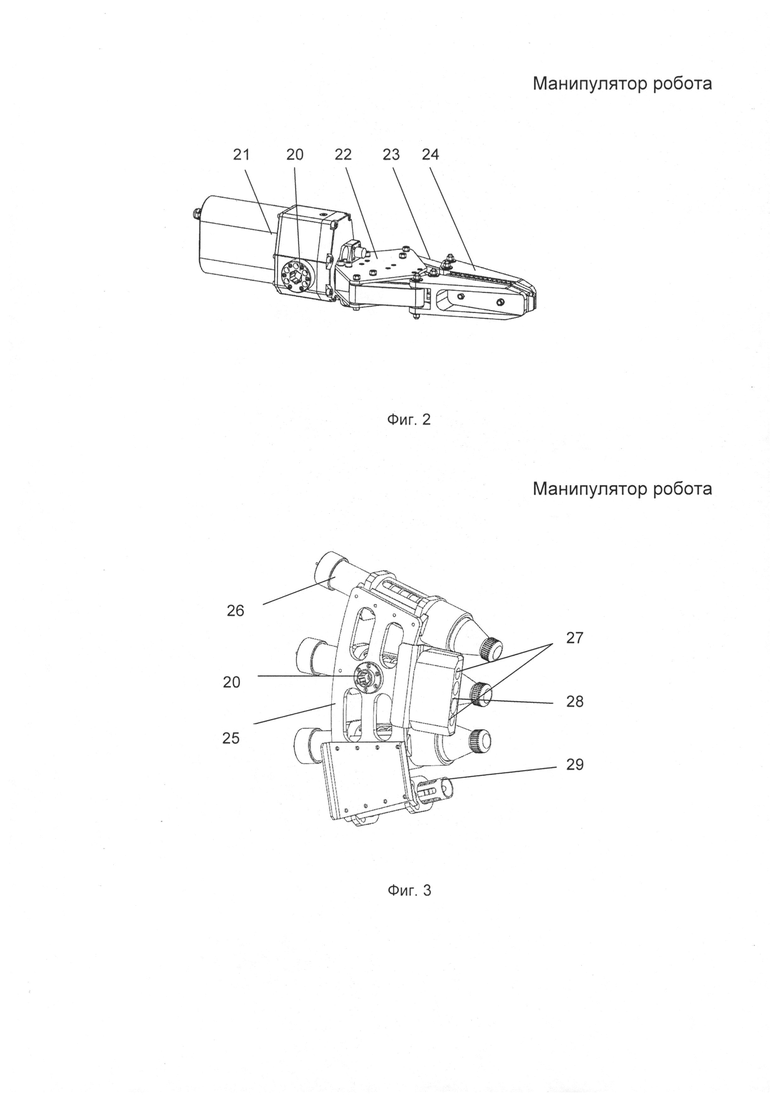
Схват (Фиг. 2) предназначен для захвата различных предметов и манипуляций с ними, а также для закрепления на нем различного оборудования. Основными составными частями схвата являются привод схвата и привод ротации схвата 21, смонтированные в одном конструктивном блоке. Схват состоит из рычажно-шарнирного механизма 22, закрепленного в двух щеках 23, и съемных губок 24. При перемещении штока винтовой передачи по направляющим, установленным в щеках 23, приводится в действие рычажно-шарнирный механизм 22 и происходит раскрытие или закрытие губок схвата 24.
Гидроразрушитель (Фиг. 3) предназначен для разрушения подозрительных предметов на месте их обнаружения методом выстрела струей воды под высоким давлением. Гидроразрушитель содержит основание 25, на котором закреплены съемные стволы 26, два лазерных целеуказателя 27, видеокамера 28 и элемент крепления 29 сопла подачи жидкого азота при наличии криогенной установки.
Манипулятор представляет собой плоский механизм, установленный на опорно-поворотном устройстве. Имеет четыре степени свободы без учета навесного оборудования, закрепляемого в качестве рабочего органа.
Основными кинематическими звеньями манипулятора являются - ОПУ 1, плечо 4, предплечье 5 и рабочий орган. ОПУ 1 имеет ротационный привод на основе планетарно-цевочного редуктора. В качестве приводов всех звеньев манипулятора используются электромеханические приводы на основе электродвигателей постоянного тока. Приводы представляют собой линейный актуатор, превращающий возвратно-поступательное линейное движение выходного звена-штока.
При включении привода 3 вращение передается через редуктор к ОПУ 1 и происходит вращение манипулятора в рабочем диапазоне углов ±360° относительно вертикальной оси. ОПУ 1 может устанавливаться как на стационарную, так и на подвижную платформу, через фланец 2 с использованием стандартного крепежа.
Плечо 4 и предплечье 5 представляют собой балки П-образной формы из алюминиевого сплава. Плечо 4 выполняет роль удлиняющего рычага и монтируется своим основанием на ОПУ 1 с возможностью поворота вверх и вниз относительно ОПУ 1 через рычажный механизм 6 за счет привода 10.
Предплечье 5 выполняет роль удлиняющего рычага, основание которого закреплено через рычажный механизм 7 с плечом 4 с возможностью поворота вверх и вниз относительно плеча 4, которое обеспечивает привод 12, расположенный внутри корпуса плеча 4.
Привод 15 предназначен для поворота вверх и вниз рабочего органа, например схвата либо гидроразрушителя в одной плоскости относительно предплечья 5.
Схват обеспечивает захват и удержание предметов массой до 15 кг и размером в поперечном сечении до 200 мм. Привод ротации схвата 21 предназначен для вращения схвата вокруг своей оси. На схвате можно установить телекамеру и осветитель (на фиг. 2 не показаны).
Гидроразрушитель может содержать до шести съемных стволов 26. При необходимости на гидроразрушитель может быть установлено сопло для подачи жидкого азота от криогенной установки для замораживания подозрительных объектов.
Таким образом, несмотря на то, что манипулятор робота показан и описан со ссылкой на его конкретный вариант осуществления, специалистам в данной области техники должно быть понятно, что различные изменения по форме и содержанию могут быть сделаны без отступления от сущности и объема технического решения, определенных прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2574547C2 |
| Схват промышленного робота | 1982 |
|
SU1065187A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
Изобретение относится к конструкции манипулятора, предназначенного для работы в труднодоступных и опасных для присутствия человека местах в дистанционном режиме. Манипулятор робота содержит последовательно соединенные между собой опорно-поворотное устройство ОПУ с фланцем, плечо, предплечье и рабочий орган, и снабженные индивидуальными управляемыми приводами каждого из них. При этом места сочленения ОПУ - плечо, плечо - предплечье и предплечье - рабочий орган выполнены в виде рычажных механизмов с возможностью поворота вверх и вниз плеча, предплечья и рабочего органа. Привод плеча расположен с его внешней стороны, основание привода закреплено в месте сочленения ОПУ с плечом, а шток на сочленении плеча и предплечья. Внутри корпуса плеча расположен привод предплечья, основание которого закреплено на корпусе плеча, а его шток через кронштейн рычажного механизма соединен с предплечьем. Привод рабочего органа установлен внутри корпуса предплечья, его основание закреплено на корпусе предплечья, а шток соединен с кронштейном рычажного механизма предплечья. На кронштейне предплечья устанавливают приспособление для крепления рабочего органа, в виде шлицевого вала со стопорным элементом, при этом на рабочем органе выполнено установочное отверстие под втулку с пазами. В качестве рабочего органа устанавливают схват или гидроразрушитель. 2 з.п. ф-лы, 3 ил.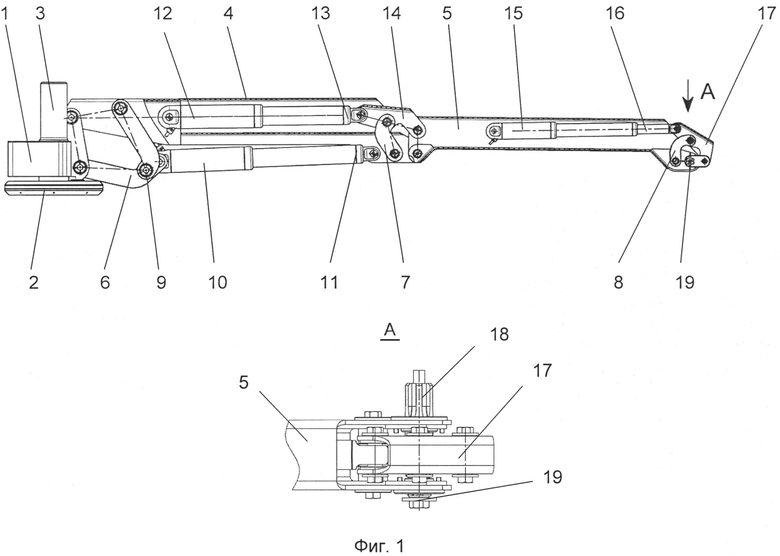
1. Манипулятор робота, содержащий последовательно соединенные между собой опорно-поворотное устройство (ОПУ) с фланцем, плечо, предплечье и рабочий орган, каждый из которых снабжен индивидуальным управляемым приводом, отличающийся тем, что места сочленения ОПУ - плечо, плечо - предплечье и предплечье - рабочий орган выполнены в виде рычажных механизмов с возможностью поворота вверх и вниз плеча, предплечья и рабочего органа, при этом привод плеча расположен с его внешней стороны, основание привода закреплено в месте сочленения ОПУ с плечом, а шток на сочленении плеча и предплечья, причем внутри корпуса плеча расположен привод предплечья, основание которого закреплено на корпусе плеча, а его шток через кронштейн рычажного механизма соединен с предплечьем, привод рабочего органа установлен внутри корпуса предплечья, его основание закреплено на корпусе предплечья, а шток соединен с кронштейном рычажного механизма предплечья, причем на кронштейне предплечья установлено приспособление для крепления рабочего органа, выполненное в виде шлицевого вала со стопорным элементом, а на рабочем органе выполнено установочное отверстие под втулку с пазами.
2. Манипулятор робота по п. 1, отличающийся тем, что в качестве рабочего органа установлен схват, состоящий из рычажно-шарнирного механизма, закрепленного в двух щеках, съемных губок и привода, осуществляющего движение губок схвата и его ротацию.
3. Манипулятор робота по п. 1, отличающийся тем, что в качестве рабочего органа установлен гидроразрушитель, содержащий закрепленные на основании съемные стволы, два лазерных целеуказателя, видеокамеру и элемент крепления сопла для подачи жидкого азота.
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| US 4932831 A1, 12.06.1990. | |||

