Изобретение относится к общему машиностроению, а именно, к передачам для сообщения возвратно-поступательного движения с помощью винтового механизма.
Из уровня техники известны конструкции линейных актуаторов с винтовой передачей, преобразующих вращение вала электродвигателя в линейное движение и используемых в качестве устройств, обеспечивающих линейное перемещение или позиционирование объекта за счет осевого усилия толкания/втягивания выдвижного штока.
Типичный линейный актуатор с выдвижным штоком содержит электродвигатель, вал которого соединен с винтовой передачей, преобразующей вращательное движение в линейное перемещение штока и состоящей из ходового винта и приводной гайки, удерживаемой от вращения таким образом, что вращение ходового винта электродвигателем вызывает линейное перемещение приводной гайки вдоль ходового винта. Приводная гайка соединена с выдвижным штоком, и вращение ходового винта приводит к линейному перемещению выдвижного штока вдоль оси ходового винта в прямом и обратном направлениях в зависимости от направления вращения вала электродвигателя.
Электродвигатель актуатора может быть расположен параллельно, перпендикулярно или соосно (в одну линию) по отношению к оси выдвижения штока, что определяется конструкцией и типом соединения вала электродвигателя и ходового винта (муфтовое соединение, зубчатая, червячная, ременная передачи и т.д.).
Корпус линейного актуатора, обычно выполненный в форме полого цилиндра или профильной трубы, вмещает в себя винтовую передачу и шток, выдвигаемый вдоль его продольной оси и выполненный в виде полого цилиндра, внутри которого расположен ходовой винт.
На свободном конце выдвижного штока устанавливается соединительная муфта, головка или вилка, для соединения с объектом, который должен приводиться в действие.
Усилие штока линейного актуатора направлено по оси его выдвижения/втягивания и в большинстве конструкций линейных актуаторов направление действия нагрузки на шток должно совпадать с осью штока, что обычно достигается использованием внешних направляющих для выравнивания, стабилизации и опоры приводимого в действие объекта. Нагрузка, направление действие которой отклоняется от указанной оси, подвергает механизмы актуатора действию создаваемых ею моментов и является нежелательной. В частности к нежелательным нагрузкам относится консольная нагрузка, создающая крутящий момент вокруг оси выдвижения штока, и радиальная (боковая) нагрузка, создающая изгибающий момент. Превышение допустимых значений нежелательных нагрузок может затруднить работу механизмов линейного актуатора и вывести их из строя.
Эти ограничения сдерживают использование линейных актуаторов в различных операциях с незакрепленными безопорными объектами, объектами с недостаточно фиксированной установкой, объектами, подвергающимися воздействию внешних нагрузок и другими объектами, создающими нежелательную нагрузку, в частности консольную и радиальную нагрузки или комбинацию этих нагрузок на шток актуатора.
Из уровня техники известна конструкция линейного актуатора с механизмом компенсации боковой нагрузки, распложенным внутри корпуса и содержащим, по меньшей мере, один рельс, прикрепленный к корпусу вдоль оси ходового винта (выдвижения штока), предварительно нагруженный до известной боковой нагрузки для воздействия, по меньшей мере, на один ролик, прикрепленный к приводной гайке линейного актуатора (см. патент US6145395, кл.F16H25/20, опубл. 14.11.2000). В предпочтительном воплощении, раскрытом в описании патента, механизм компенсации боковой нагрузки содержит две пары рельс, расположенных по обеим сторонам от выдвижного штока вдоль оси ходового винта, а приводная гайка снабжена несколькими парами роликов, установленных посредством валов вдоль направления осевого перемещения приводной гайки таким образом, что каждый ролик расположен между одной из пар рельс. Дополнительно, между выдвижным штоком и корпусом установлена втулка (или подшипник скольжения), суммирующая нагрузку на конце исполнительного механизма и компенсирующую нагрузку, обеспечиваемую предварительно нагруженными рельсами.
Недостатком описанной конструкции актуатора с механизмом компенсации боковой нагрузки является зависимость эффективности компенсации боковой нагрузки от направления её действия. Заявленная работа механизма компенсации боковой нагрузки выполняется с максимальной эффективностью тогда, когда действие боковой нагрузки направлено перпендикулярно осям валов роликов. По мере изменения направления действия боковой нагрузки работа механизма изменяется. Нагрузку, направление действия которой параллельно осям валов роликов воспринимает только часть механизма – втулка (или подшипник скольжения), в которой в таком случае будет иметь место заклинивание и повышенный износ.
Из области техники известен так же линейный актуатор, содержащий двигатель с выходным валом и корпус, внутри которого расположены винтовой механизм и шариковый механизм компенсации нежелательной нагрузки, причём винтовой механизм включает в себя ходовой винт, взаимодействующую с ним гайку и выдвижной шток, концентрично расположенный вокруг, по меньшей мере, части ходового винта и соединенный с указанной гайкой, при этом винтовой механизм соединён с двигателем таким образом, что вращение его выходного вала вызывает осевое перемещение гайки и выдвижного штока относительно корпуса (см. патент CN105051424, кл.F16H25/24, опубл. 06.04.2018).
В приведенном техническом решении в качестве шарикового механизма компенсации нежелательной нагрузки использована шариковая втулка.
Используемая шариковая втулка в качестве шарикового механизма компенсации нежелательной нагрузки не обеспечивает надежность работы линейного актуатора и кроме того приводит к увеличению габаритов и веса линейного актуатора в целом.
Технической проблемой является создание линейного актуатора и линейного исполнительного механизма, конструкция которых обеспечивает возможность компенсации нежелательных нагрузок, направление действия которых не совпадает с осью штока актуатора.
Технический результат заключается в упрощении конструкции линейного актуатора, повышении надёжности работы устройства, уменьшению габаритов и снижению веса.
В части линейного актуатора поставленная проблема решается, а технический результат достигается за счет разработки линейного актуатора, характеризующегося наличием двигателя с выходным валом и корпуса, внутри которого расположены винтовой механизм и шариковый механизм компенсации нежелательной нагрузки, причём винтовой механизм включает в себя ходовой винт, взаимодействующую с ним гайку и выдвижной шток, концентрично расположенный вокруг, по меньшей мере, части ходового винта и соединенный с указанной гайкой, при этом винтовой механизм соединён с двигателем таким образом, что вращение его выходного вала вызывает осевое перемещение гайки и выдвижного штока относительно корпуса, шариковый механизм компенсации нежелательной нагрузки образован, по меньшей мере, двумя продольными направляющими канавками на внутренней поверхности корпуса, по меньшей мере, двумя ответными продольными направляющими канавками на внешней поверхности выдвижного штока и шариковым сепаратором с, по меньшей мере, двумя рядами ячеек, выполненными напротив указанных направляющих канавок, в которых с возможностью свободного вращения размещены шарики, обкатывающие поверхности этих направляющих канавок. Шариковый механизм компенсации нежелательной нагрузки предпочтительно снабжён, по меньшей мере, одной пружиной, препятствующей соскальзыванию шарикового сепаратора под действием собственного веса при наклонном расположении линейного актуатора.
В части исполнительного механизма поставленная проблема решается, а технический результат достигается тем, что линейный исполнительный механизм содержит корпус, внутри которого расположены винтовой механизм и шариковый механизм компенсации нежелательной нагрузки, причём винтовой механизм включает в себя ходовой винт, взаимодействующую с ним гайку и выдвижной шток, концентрично расположенный вокруг, по меньшей мере, части ходового винта и соединенный с указанной гайкой, при этом вращение ходового винта вызывает осевое перемещение гайки и выдвижного штока относительно корпуса, шариковый механизм компенсации нежелательной нагрузки образован, по меньшей мере, двумя продольными направляющими канавками на внутренней поверхности корпуса, по меньшей мере, двумя ответными продольными направляющими канавками на внешней поверхности выдвижного штока и шариковым сепаратором с, по меньшей мере, двумя рядами ячеек, выполненными напротив указанных направляющих канавок, в которых с возможностью свободного вращения размещены шарики, обкатывающие поверхности этих направляющих канавок. Шариковый механизм компенсации нежелательной нагрузки предпочтительно снабжён, по меньшей мере, одной пружиной, препятствующей соскальзыванию шарикового сепаратора под действием собственного веса при наклонном расположении линейного исполнительного механизма.
Далее один из множества возможных вариантов воплощения изобретения будет описан более подробно со ссылкой на прилагаемые чертежи, на которых:
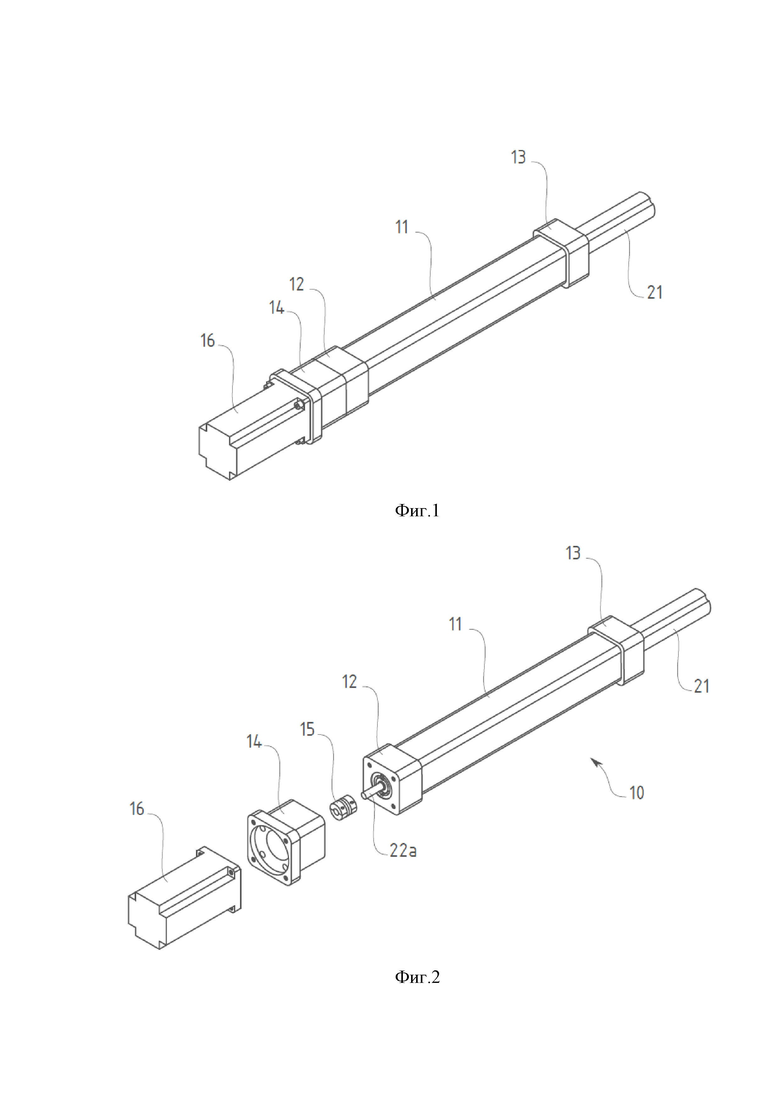
на фиг.1 показан аксонометрический вид линейного актуатора в соответствии с настоящим изобретением;
на фиг.2 – аксонометрический вид линейного актуатора по фиг.1 в частично разобранном виде;
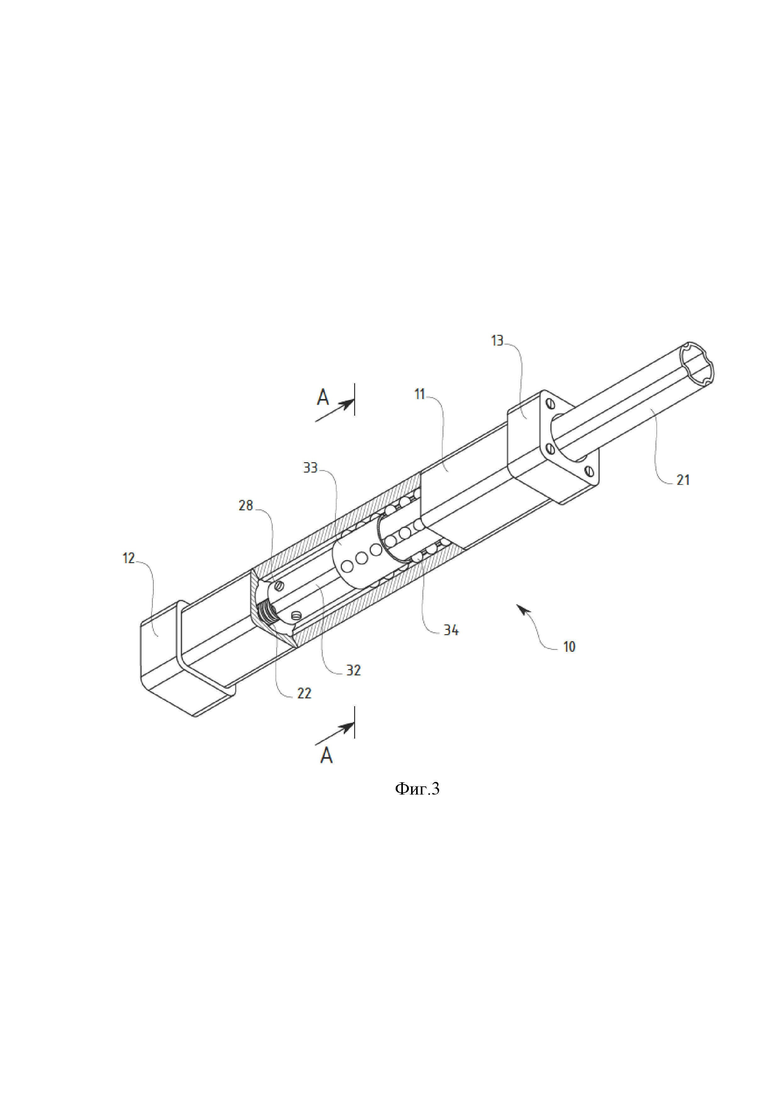
на фиг.3 – аксонометрический вид линейного исполнительного механизма с вырезом в корпусе и с вырезом в шариковом сепараторе, находящемся внутри корпуса;
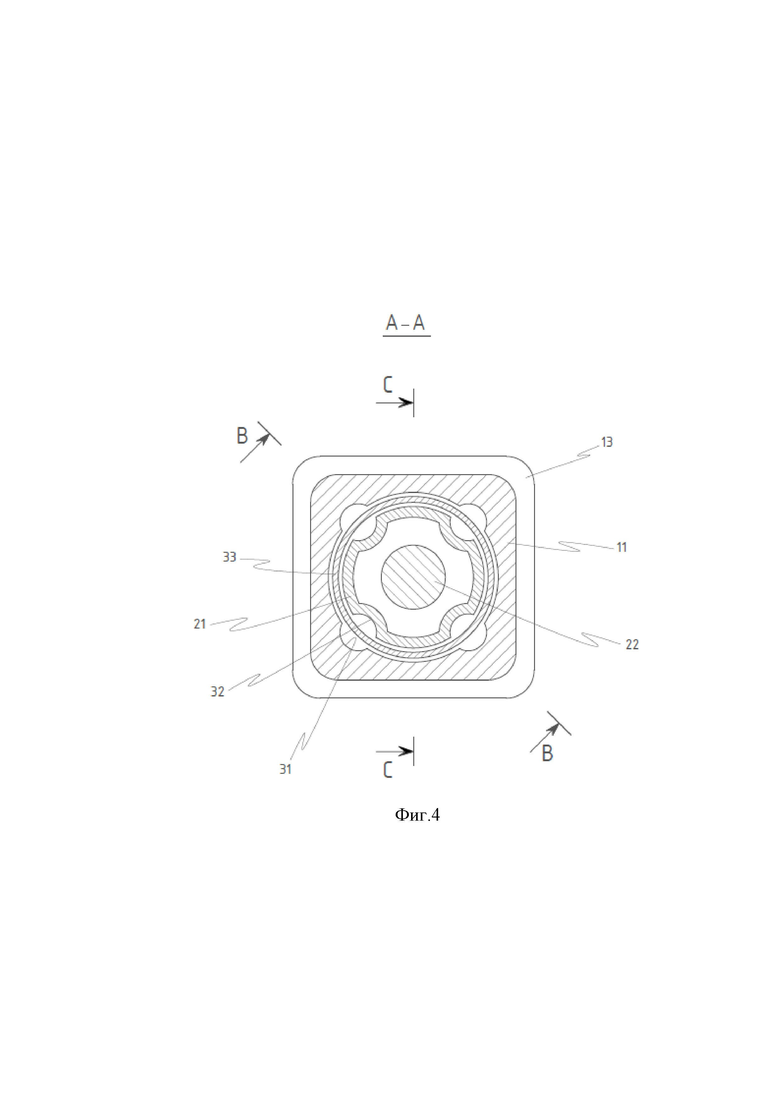
на фиг.4 – вид поперечного сечения по линии А-А на фиг.3;
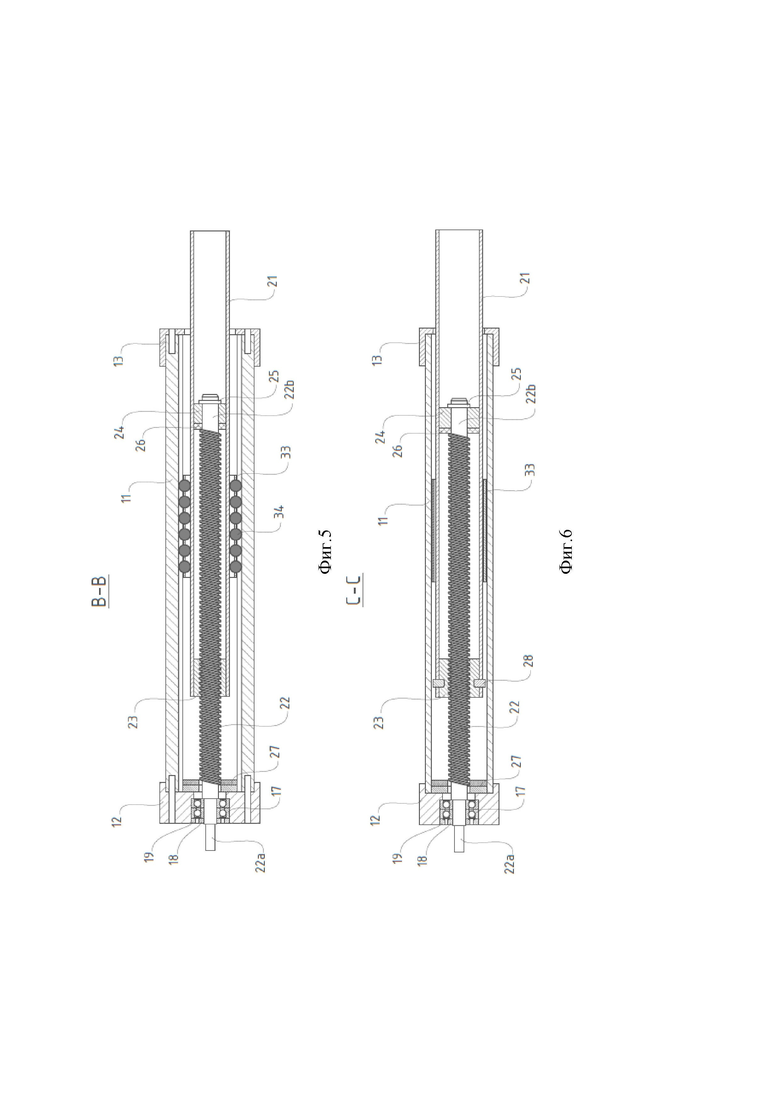
на фиг.5 – вид в продольном сечении линейного исполнительного механизма, показанного на фиг.3 и сделанного по линии В-В на фиг.4;
на фиг.6 – вид в продольном сечении линейного исполнительного механизма, показанного на фиг.3 и сделанного по линии С-С на фиг.4;
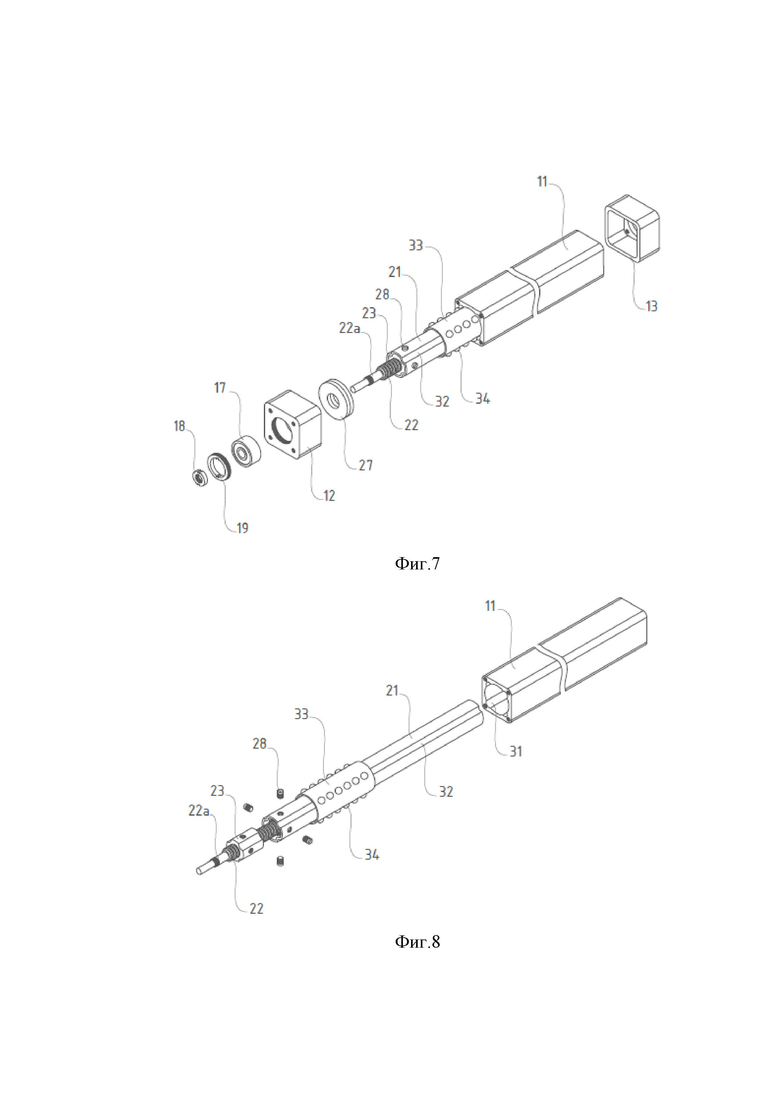
на фиг.7 – аксонометрический вид линейного исполнительного механизма в разобранном виде;
на фиг.8 – аксонометрический вид винтового механизма, извлеченного из корпуса;
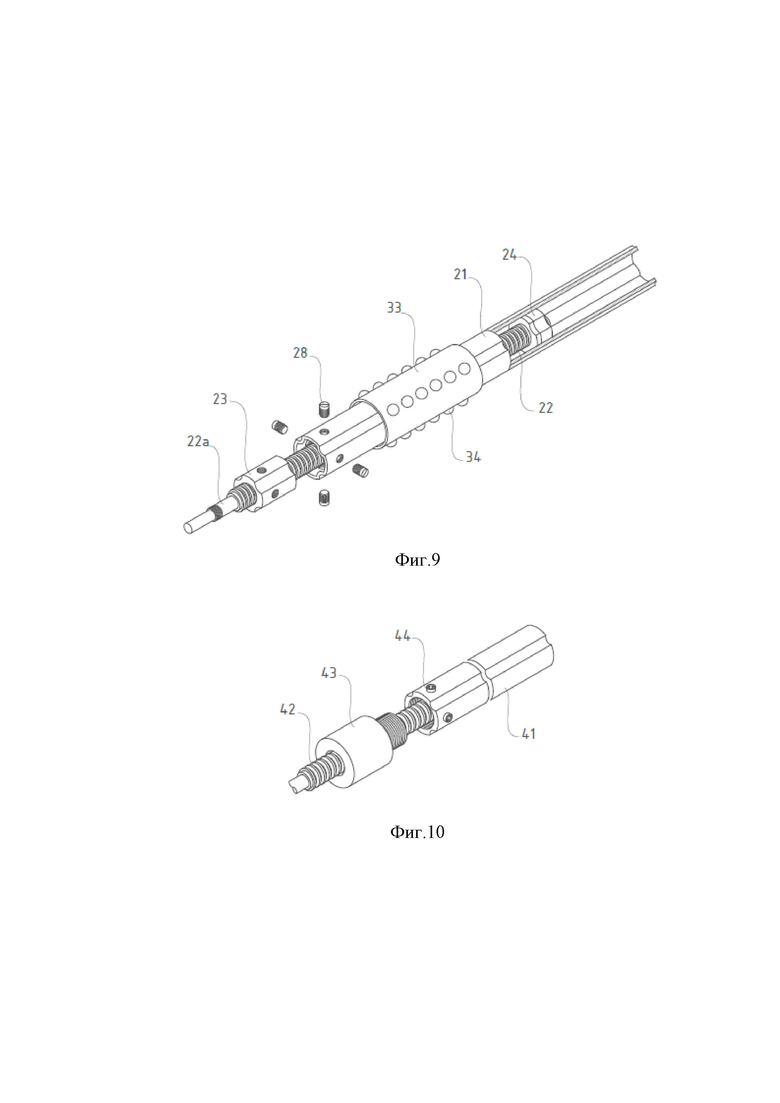
на фиг.9 – аксонометрический вид винтового механизма в разобранном виде с вырезом в выдвижном штоке;
на фиг.10 – аксонометрический вид соединения шариковой гайки с выдвижным штоком;
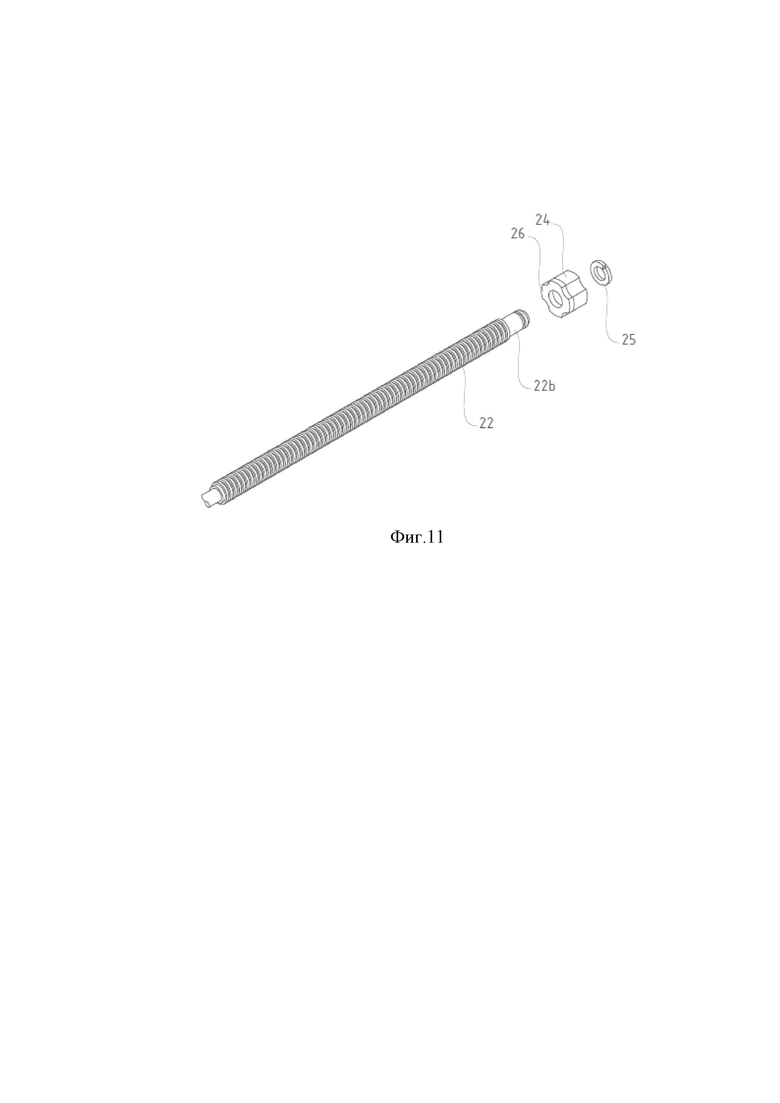
на фиг.11 – аксонометрический вид ходового винта с ограничителем в разобранном виде;
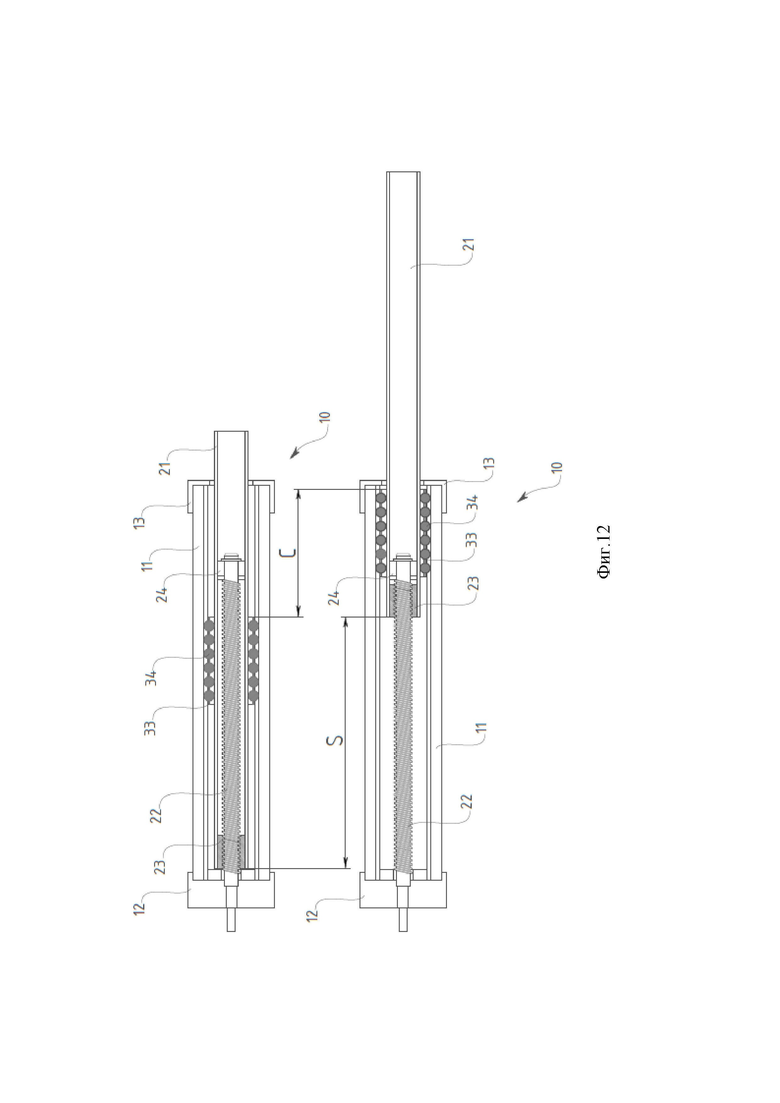
на фиг.12 – схематичное изображение линейного исполнительного механизма с выдвижным штоком в двух крайних положениях;
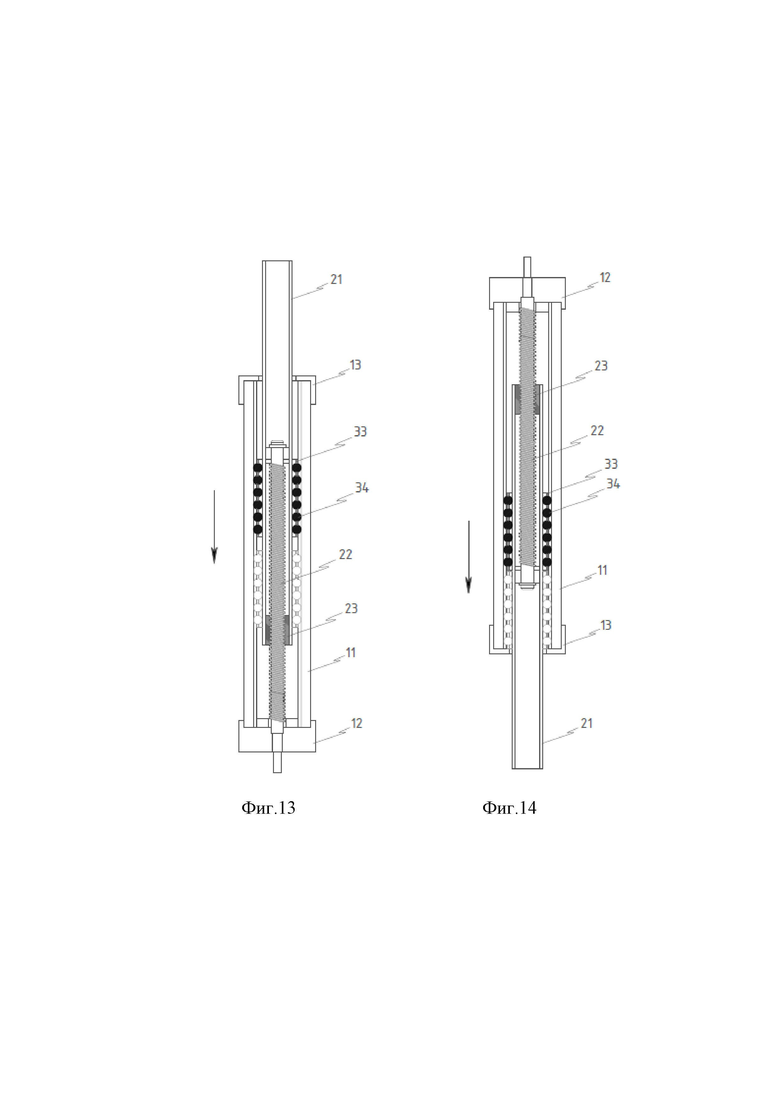
на фиг.13 – схематичное изображение линейного исполнительного механизма в наклонном положении, когда передняя концевая часть выдвижного штока находится выше задней концевой части;
на фиг.14 – схематичное изображение линейного исполнительного механизма в наклонном положении, когда передняя концевая часть выдвижного штока находится ниже задней концевой части;
на фиг.15 – схематичный аксонометрический вид установки пружин поддерживающих сепаратор с шариками.
На фиг.1-2 изображен предлагаемый линейный актуатор, содержащий электродвигатель 16, муфту 15 с корпусом 14 муфты и линейный исполнительный механизм 10, содержащий корпус 11, имеющий заднюю концевую часть, приближенную к электродвигателю, и противоположную переднюю концевую часть, удаленную от него с расположенными в нем винтовым механизмом и механизмом компенсации нежелательной нагрузки.
Электродвигатель 16, являясь источником вращательной мощности, передает крутящий момент на винтовой механизм, для чего выходной вал электродвигателя 16 соединен посредством муфты 15 с концевой частью 22а ходового винта 22.
Соединение вала электродвигателя с винтовым механизмом линейного актуатора может быть выполнено посредством любого механического средства передачи вращательного движения (гибкой или жёсткой муфты, ременной передачи, зубчатой передачи, червячной передачи и т.п.), в том числе с редукцией и с различными взаимными конфигурациями расположения электродвигателя и линейного исполнительного механизма (в частности, непосредственная насадка рабочего органа ведомого механизма на вал).
Корпус 11 выполнен в виде профильной трубы с продольными шариковыми направляющими канавками на внутренней поверхности круглого сечения.
Продольная шариковая направляющая канавка (далее в тексте описания - «направляющая канавка») является элементом шарикового механизма компенсации нежелательной нагрузки (далее в тексте описания - «механизм компенсации»)
Как показано на фиг.3-6, винтовой механизм, расположенный внутри корпуса 11, содержит гайку 23, взаимодействующую с ходовым винтом 22 и выдвижной шток 21, соединенный с гайкой 23 для осевого перемещения с ней.
В описываемом воплощении настоящего изобретения как лучше всего видно на фиг.4 на внутренней поверхности корпуса 11 выполнены четыре направляющие канавки 31, и на внешней поверхности выдвижного штока 21 выполнены четыре ответные направляющие канавки 32. Направляющие канавки 31 и 32 разделены равными интервалами по длине окружности поперечного сечения внутренней поверхности корпуса 11 и внешней поверхности выдвижного штока 21 соответственно. Направляющие канавки 31 и 32 являются вогнутыми в поперечном сечении и в каждой паре обращены друг к другу.
Выдвижной шток 21 выполнен в виде профильной трубы, внешний контур поперечного сечения которой содержит направляющие канавки 32, а внутренний контур повторяет очертания внешнего контура.
Размеры внешнего контура поперечного сечения гайки 23 выполнены под внутренний контур поперечного сечения выдвижного штока 21 и, как можно видеть на фиг.7-8, гайка 23, охватывающая ходовой винт 22, соединена с выдвижным штоком 21 по сопрягаемым поверхностям с креплением винтами 28 к задней концевой части.
В передней концевой части выдвижного штока 21 установлен соединительный элемент (не показан) для соединения с объектом, который должен приводиться в действие.
Торцы концевых частей корпуса 11 закрыты крышками 12 и 13. В задней крышке 12 корпуса 11 установлен подшипник 17 с креплением наружного кольца внутренней гайкой 19.
Ходовой винт 22 установлен в подшипник 17 задней концевой частью 22а с креплением внутреннего кольца шлицевой гайкой 18. Двухрядный радиально-упорный шарикоподшипник 17 поддерживает ходовой винт 22 с возможностью вращения, удерживая его от осевого смещения.
Передняя концевая часть 22b ходового винта 22 имеет гладкую поверхность и установлена при помощи стопорной шайбы 25 в направляющую втулку 24 с возможностью вращения (см. фиг.5, 6, 9, 11).
Наружная поверхность направляющей втулки 24, аналогично гайке 23 примыкает к внутренней поверхности выдвижного штока 21, но с небольшим зазором, что не препятствует осевому перемещению выдвижного штока 21 относительно ходового винта 22, поддерживая выравнивание между ходовым винтом 22 и выдвижным штоком 21 по общей продольной оси. Контактные поверхности направляющей втулки 24 содержат скользящий слой.
Таким образом, винт 22 вращается внутри выдвижного штока 21, когда последний вместе с гайкой 23 перемещается вдоль продольной оси.
Направляющая втулка 24 также выполняет функцию ограничителя движения гайки 23. Для смягчения удара при возможном контакте с гайкой 23 на стороне втулки 24 обращенной к гайке 23 установлена демпфирующая шайба 26, выполненная из эластичного материала, например резины или тому подобного.
С этой же целью между задней крышкой 12 и гайкой 23 установлена демпфирующая шайба 27.
В винтовом механизме может быть использована как винтовая передача скольжения, так и винтовая передача качения (шариковинтовая или роликовинтовая). На фиг.10 показано соединение цилиндрической шариковой гайки 43 с внешней резьбой с выдвижным штоком 41. Для этого задняя концевая часть выдвижного штока 41 выполнена с внутренней резьбой, в которую завинчивается гайка 43 с последующей фиксацией винтами 44. Ходовой винт 42 шарико-винтовой передачи выполнен с беговой дорожкой для шариков.
Механизм компенсации кроме упомянутых выше четырех направляющих канавок 31, выполненных на внутренней поверхности корпуса 11 и ответных направляющие канавок 32, выполненных на внешней поверхности выдвижного штока 21 содержит шариковый сепаратор 33 с четырьмя рядами ячеек, в которых расположены шарики 34 (по одному ряду для каждой пары ответных направляющих канавок 31, 32).
Шариковый сепаратор 33 с шариками 34 концентрично расположен между внутренней поверхностью корпуса 11 и внешней поверхностью выдвижного штока 21 таким образом, что каждый шарик находится между двумя направляющими канавками 31 и 32 и в контакте с вогнутой поверхностью каждой из них. Шарики 34 размещены в сепараторе 33 таким образом, что каждый шарик может свободно вращаться в ячейке сепаратора 33, так что при перемещении выдвижного штока 21 относительно корпуса 11 шарики 34 катятся по направляющим канавкам 31 и 32, увлекая за собой сепаратор 33. Необходимое количество шариков 34 определяется исходя из нагрузки на выдвижной шток 21. Ход сепаратора 33 с шариками 34 ограничен крышкой 13 корпуса 11 с одной стороны, и выступающими головками винтов 28 крепления гайки 23 к задней концевой части выдвижного штока 21 с другой стороны (см. фиг. 6, 7 и 8).
Радиус кривизны направляющих канавок 31 и 32 близок к радиусу шариков 34, что блокирует вращение выдвижного штока 21 относительно корпуса 11, не препятствуя его осевому перемещению.
Предлагаемые устройства работают следующим образом.
Электродвигатель 16, подключенный с возможностью изменения направления вращения выходного вала, при подаче напряжения приводит во вращение ходовой винт 22.
Гайка 23 удерживаемая от вращения (поскольку соединена с выдвижным штоком 21, вращение которого относительно корпуса 11 заблокировано) перемещается с выдвижным штоком 21либо в направлении концевой части корпуса 11, приближенной к электродвигателю, либо в противоположном направлении, в зависимости от направления вращения ходового винта 22.
Вращение ходового винта 22 и линейное перемещение выдвижного штока 21 продолжается до момента отключения электродвигателя 16. Предельные положения выдвижного штока 21 регулируются концевыми выключателями (не показаны).
Как во время движения выдвижного штока 21, так и во время остановки механизм компенсации поддерживает выдвижной шток 21 многими шариками 34 сепаратора 33 в направляющих канавках 31 и 32 на внутренней поверхностью корпуса 11 и внешней поверхностью выдвижного штока 21, удерживая выдвижной шток 21 и весь винтовой механизм от смещения относительно линии продольного расположения узлов линейного актуатора и блокируя вращение вокруг продольной оси, когда нежелательная нагрузка прикладывается к соединительному элементу в передней концевой части выдвижного штока 21, при этом не препятствуя его осевому перемещению при передаче осевого усилия.
Кроме этого, как следует из настоящего описания, дополнительно к своей основной функции механизм компенсации выполняет функцию механизма противовращения, предусмотренного в большинстве конструкций линейных актуаторов, а именно, удерживает гайку 23 от вращения относительно корпуса 11 во время вращения ходового винта 22.
В процессе выдвижения/втягивания выдвижного штока 21 шарики 34 за счет фрикционного сцепления с поверхностями направляющих канавок 31 и 32 катятся, двигаясь в направлении перемещения выдвижного штока 21. Линейное расстояние перемещений шариков 34 будет меньше, чем линейное расстояние, пройденное внешней поверхностью выдвижного штока 21 относительно корпуса 11. Как известно, когда шарик катится между движущейся и неподвижной пластиной, скорость перемещения центра шарика составляет половину скорости перемещения подвижной пластины. Таким образом, относительно неподвижной пластины подвижная пластина переместится на расстояние вдвое больше, чем центр катящегося между ними шарика.
Таким образом, сепаратор 33 с шариками 34, перемещаясь одновременно с выдвижным штоком 21 и в одном с ним направлении, проходит расстояние вдвое меньше за каждый отрезок времени. На фиг.12 показан линейный исполнительный механизм 10 с выдвижным штоком 21 в двух крайних положениях, в крайнем втянутом положении (сверху), и в крайнем выдвинутом положении (снизу), а также положения сепаратора 33 с шариками 34 соответствующие крайним положениям выдвижного штока 21. Как можно видеть, выдвижной шток 21 выдвигаясь из крайнего втянутого положения «догоняет» сепаратор 33 задней концевой частью и расстояние S перемещения гайки 23 с выдвижным штоком 21 соответствует линейному расстоянию С, пройденному катящимися шариками 34 и сепаратором 33. При движении в противоположном направлении выдвижной шток 21 втягиваясь «убегает» задней концевой частью от сепаратора 33. При качении шариков 34 без проскальзывания каждому промежуточному положению выдвижного штока 21 соответствует положение сепаратора 33, и в целом рабочему диапазону линейного перемещения штока соответствует рабочий диапазон линейного перемещения сепаратора.
Длúны ходового винта 22 и сепаратора 33 относительно длины корпуса 11 рассчитаны таким образом, чтобы в крайнем выдвинутом положении штока 21 сепаратор 33 с шариками 34 могли помещаться между ограничивающей движение гайки 23 поверхностью направляющей втулки 24 и крышкой 13.
Сепаратор с шариками удерживаются в каждом из положений за счет фрикционного сцепления шариков 34 с поверхностями направляющих канавок 31 и 32.
Во многих применениях линейный актуатор имеет наклонное расположение, либо меняет угол относительно горизонтальной плоскости в процессе выдвижения/втягивания штока, что может в положениях близких к вертикальному, в некоторых случаях по мере износа соприкасающихся поверхностей (шариков 34 и направляющих канавок 31 и 32) вызывать ослабление контакта шариков 34 с поверхностями направляющих канавок 31 и 32 (в частности, когда нежелательная нагрузка отсутствует, либо её действие ослабевает или меняет свое направление), и вследствие этого соскальзывание сепаратора 33 с шариками 34 под действием собственного веса.
При таком расположении линейного актуатора, когда передняя концевая часть выдвижного штока 21 находится выше задней концевой части, сепаратор 33 с шариками 34 может соскальзывать в направлении задней концевой части выдвижного штока 21 (см фиг.13).
При таком расположении линейного актуатора, когда передняя концевая часть выдвижного штока 21 находится ниже задней концевой части, сепаратор 33 с шариками 34 может соскальзывать в направлении передней концевой части выдвижного штока 21 (см. фиг.14). Направление соскальзывания сепаратора 33 с шариками 34 показано стрелкой.
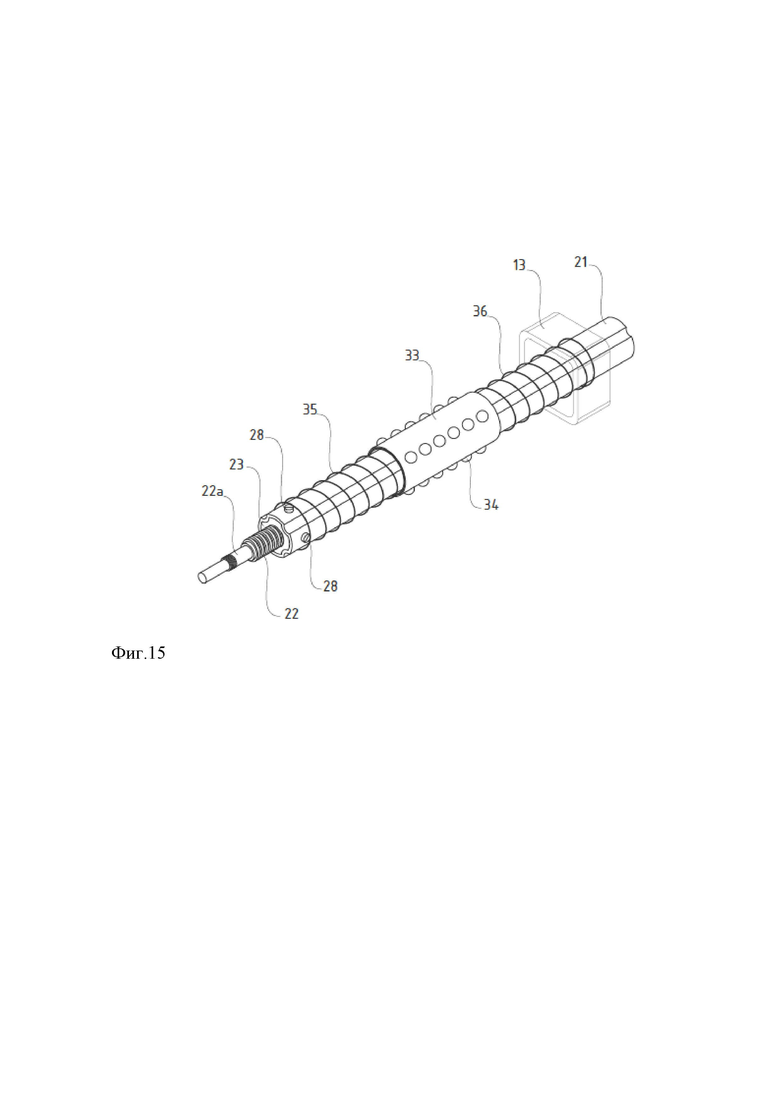
Для препятствования соскальзыванию сепаратора 33 с шариками 34 под действием собственного веса при наклонном расположении линейного актуатора между сепаратором 33 и элементами, ограничивающими его линейное перемещение, могут быть установлены поддерживающие пружины сжатия 35 и 36 (см. фиг.15).
Пружина 35 может быть установлена между сепаратором 33 и винтами 28 в задней концевой части выдвижного штока 21 при использовании линейного актуатора в наклонном положении, когда передняя концевая часть выдвижного штока 21 находится выше задней концевой части. Пружина 35 одним своим концом упирается в задний торец сепаратора 33, а другим концом в выступающие головки винтов 28.
Пружина 36 может быть установлена между сепаратором 33 и передней концевой частью выдвижного штока 21 при использовании линейного актуатора в наклонном положении, когда передняя концевая часть выдвижного штока 21 находится ниже задней концевой части. Пружина 36 одним своим концом упирается в передний торец сепаратора 33, а другим концом во внутреннюю стенку крышки 13 корпуса 11.
Благодаря предлагаемой конструкции как при осевом перемещении выдвижного штока относительно корпуса линейного актуатора, так и во время остановки движения, действие моментов, создаваемых нежелательной нагрузкой на выдвижной шток, передаётся через шарики на корпус, рассчитанный на их восприятие и компенсацию. Шариковый механизм компенсации нежелательной нагрузки удерживает выдвижной шток и весь винтовой механизм от смещения относительно линии продольного расположения узлов линейного актуатора и блокирует вращение относительно корпуса, не препятствуя передаче осевого усилия. Механические передачи линейного актуатора, воспринимающие осевую нагрузку, изолированы от действия моментов, создаваемых нежелательной нагрузкой. При этом эффективность механизма компенсации моментов не зависит от направления действия создающей их нежелательной нагрузки, а потери на трение минимизированы (катящийся шарик передает нагрузку через контактную точку). Кроме того, отсутствие в любом положении устройства взаимодействия скользящих поверхностей соприкасающихся деталей, воспринимающих и передающих нежелательную нагрузку, исключает возможность связывания (заклинивания) или повышенной интенсивности износа трущихся поверхностей. Таким образом, предлагаемое изобретение позволяет значительно повысить надёжность работы линейного актуатора и линейного исполнительного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный исполнительный механизм | 2021 |
|
RU2752673C1 |
| Линейный исполнительный механизм гидросооружений | 2021 |
|
RU2752672C1 |
| Линейный привод | 2021 |
|
RU2768985C1 |
| РАБОЧАЯ СТАНЦИЯ (ВАРИАНТЫ) | 2018 |
|
RU2688293C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМЕХАНИЗМ В.И.СМИРНОВА | 1992 |
|
RU2102826C1 |
| ПРИВОД ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2339858C2 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| ЛИНЕЙНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2580979C9 |
| Устройство линейного перемещения исполнительного органа | 1989 |
|
SU1719753A1 |
| Механизм линейного перемещения | 1989 |
|
SU1774103A1 |
Изобретение относится к области машиностроения. Линейный актуатор содержит двигатель с выходным валом и корпус, внутри которого расположены винтовой механизм и шариковый механизм компенсации нежелательной нагрузки. Винтовой механизм включает в себя ходовой винт, взаимодействующую с ним гайку и выдвижной шток, концентрично расположенный вокруг, по меньшей мере, части ходового винта и соединенный с указанной гайкой. Винтовой механизм соединён с двигателем таким образом, что вращение его выходного вала вызывает осевое перемещение гайки и выдвижного штока относительно корпуса. В линейном исполнительном механизме вращение ходового винта вызывает осевое перемещение гайки и выдвижного штока относительно корпуса. Шариковый механизм компенсации нежелательной нагрузки образован, по меньшей мере, двумя продольными направляющими канавками на внутренней поверхности корпуса, по меньшей мере, двумя ответными продольными направляющими канавками на внешней поверхности выдвижного штока и шариковым сепаратором с, по меньшей мере, двумя рядами ячеек, выполненными напротив указанных направляющих канавок. В ячейках с возможностью свободного вращения размещены шарики, обкатывающие поверхности этих направляющих канавок. Обеспечивается повышение надёжности работы устройств. 2 н. и 2 з.п. ф-лы, 15 ил.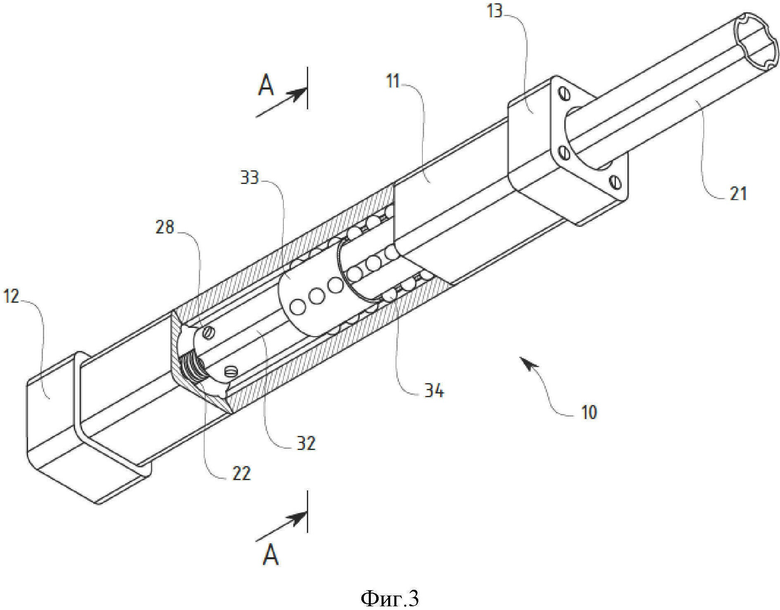
1. Линейный актуатор, характеризующийся наличием двигателя с выходным валом и корпуса, внутри которого расположены винтовой механизм и шариковый механизм компенсации нежелательной нагрузки, причём винтовой механизм включает в себя ходовой винт, взаимодействующую с ним гайку и выдвижной шток, концентрично расположенный вокруг, по меньшей мере, части ходового винта и соединенный с указанной гайкой, при этом винтовой механизм соединён с двигателем таким образом, что вращение его выходного вала вызывает осевое перемещение гайки и выдвижного штока относительно корпуса, упомянутый шариковый механизм компенсации нежелательной нагрузки образован, по меньшей мере, двумя продольными направляющими канавками на внутренней поверхности корпуса, по меньшей мере, двумя ответными продольными направляющими канавками на внешней поверхности выдвижного штока и шариковым сепаратором с, по меньшей мере, двумя рядами ячеек, выполненными напротив указанных направляющих канавок, в которых с возможностью свободного вращения размещены шарики, обкатывающие поверхности этих направляющих канавок.
2. Линейный актуатор по п.1, отличающийся тем, что шариковый механизм компенсации нагрузки снабжён, по меньшей мере, одной пружиной, препятствующей соскальзыванию шарикового сепаратора под действием собственного веса при наклонном расположении линейного актуатора.
3. Линейный исполнительный механизм, характеризующийся наличием корпуса, внутри которого расположены винтовой механизм и шариковый механизм компенсации нагрузки, причём винтовой механизм включает в себя ходовой винт, взаимодействующую с ним гайку и выдвижной шток, концентрично расположенный вокруг, по меньшей мере, части ходового винта и соединенный с указанной гайкой, при этом вращение ходового винта вызывает осевое перемещение гайки и выдвижного штока относительно корпуса, при этом шариковый механизм компенсации нагрузки образован, по меньшей мере, двумя продольными направляющими канавками на внутренней поверхности корпуса, по меньшей мере, двумя ответными продольными направляющими канавками на внешней поверхности выдвижного штока и шариковым сепаратором с, по меньшей мере, двумя рядами ячеек, выполненными напротив указанных направляющих канавок, в которых с возможностью свободного вращения размещены шарики, обкатывающие поверхности этих направляющих канавок.
4. Линейный исполнительный механизм по п.3, отличающийся тем, что шариковый механизм компенсации нагрузки снабжён, по меньшей мере, одной пружиной, препятствующей соскальзыванию шарикового сепаратора под действием собственного веса при наклонном расположении линейного исполнительного механизма.
| US 6145395 A1, 14.11.2000 | |||
| CN 105051424 B, 06.04.2018 | |||
| US 9631712 B2, 25.04.2017 | |||
| ЛИНЕЙНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2010 |
|
RU2549422C2 |
| US 8899120 B2, 02.12.2014. | |||

