ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к устройству и способу оптического осмотра сантехнических изделий.
УРОВЕНЬ ТЕХНИКИ
Данное изобретение относится к производству керамических сантехнических изделий, таких как, например, унитазы, раковины, умывальники, биде, писсуары, ванны и душевые поддоны. Сантехнические изделия такого рода обычно изготовлены путем шликерного литья, что может привести к производству дефектных деталей. В процессе производства керамических изделий, в частности после этапов формования путем литья, сушки и в конце процесса обжига (который обычно является последним этапом процесса производства керамики), проводятся проверки качества. Такие проверки качества проводятся для выявления наличия дефектов, чтобы предотвратить производство бракованных заготовок изделий и/или выпуск на рынок несоответствующих деталей. Более подробно, проверка качества обеспечивает выявление деталей с низким уровнем дефектности, которые могут быть переработаны, и детали с высоким уровнем дефектности, которые должны быть отбракованы. Проверка качества также может быть полезна для принятия корректирующих мер в производственном процессе.
Традиционно контроль качества осуществляют специалисты-операторы, которые проверяют готовые детали невооруженным глазом после этапов формования путем литья, сушки и обжига для выявления возможных ошибок формования, деформаций и неровностей поверхности и проводят ручные измерения с помощью инструментов, таких как внешние калибры, шаблоны и калибры-пробки для выявления нарушения размеров. Такая проверка качества занимает много времени и имеет ограниченную надежность, поскольку зависит от опыта и знаний оператора.
В патентном документе US 2003/0184740 А1, относящемся к области производства керамической посуды, раскрыта оптическая смотровая машина, содержащая осветитель, выполненный с возможностью освещения осматриваемой детали рассеянным светом, и камеру, расположенную в закрепленном положении в отверстии рассеивателя света и выполненную с возможностью обзора детали сверху. Однако данная машина не подходит для осмотра более сложных объектов, таких как сантехническое оборудование, имеющее множество поверхностей, подлежащих осмотру. Кроме того, из патентного документа JPH 06148093 А известна оптическая смотровая машина для сантехнических изделий, содержащая роботизированный манипулятор, при этом данная машина имеет ограниченную эффективность осмотра.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью данного изобретения является предложение устройства и способа для оптического осмотра сантехнических изделий, которые обеспечивают устранение вышеуказанных недостатков известного уровня техники.
Данная цель полностью достигается с помощью устройства и способа согласно данному изобретению, описанных в прилагаемой формуле изобретения.
Более конкретно, данное изобретение относится к устройству для оптического осмотра сантехнических изделий. Сантехническое изделие обычно содержит керамический корпус, который может находиться в пластичном состоянии или может быть высушен после процессов литья и сушки, в этих случаях сантехническое изделие является заготовкой. Сантехническое изделие может содержать керамический корпус с глазурным покрытием (после обжига), в этом случае сантехническое изделие является готовым изделием.
Предпочтительно устройство содержит опорное средство, выполненное с возможностью размещения в нем осматриваемого сантехнического изделия в положении осмотра.
Устройство содержит по меньшей мере одну камеру, выполненную с возможностью получения изображений осматриваемого сантехнического изделия, размещенного в положении осмотра.
Устройство содержит автоматический манипулятор, выполненный с возможностью перемещения между рабочими положениями относительно опорного средства (то есть относительно осматриваемого сантехнического изделия, размещенного в положении осмотра, то есть относительно закрепленного эталона). Указанная по меньшей мере одна камера установлена на указанном автоматическом манипуляторе (или связана с ним). Предпочтительно указанная по меньшей мере одна камера установлена на свободном конце автоматического манипулятора (манипулятор проходит между первым, закрепленным концом, выполненным с возможностью соединения с плоской опорной поверхностью, и вторым, свободным концом, выполненным с возможностью перемещения относительно указанной плоской опорной поверхности. Предпочтительно устройство содержит головку (или смотровую головку), связанную со свободным концом механического манипулятора. Указанная по меньшей мере одна камера предпочтительно установлена на смотровой головке.
Устройство содержит блок управления, выполненный с возможностью получения изображений, снятых указанной по меньшей мере одной камерой. Блок управления имеет доступ к базе данных (или к памяти). В одном варианте выполнения база данных содержится в указанном устройстве. В одном варианте выполнения база данных является удаленной. База данных содержит эталонные данные. В одном варианте выполнения эталонные данные содержат изображения эталонного сантехнического изделия, не имеющего дефектов.
В одном варианте выполнения эталонные данные содержат стандартные размеры эталонного сантехнического изделия.
В одном варианте выполнения эталонные данные содержат эталонные допуски для эталонных размеров.
В одном варианте выполнения эталонные данные относятся к одному или более отличительным дефектам (или являются типичными для них).
В одном варианте выполнения эталонные данные содержат последовательность рабочих положений для автоматического манипулятора.
Блок управления выполнен с возможностью обработки изображений в зависимости от эталонных данных для предоставления диагностической информации о дефектности сантехнического изделия. Например, блок управления может быть выполнен с возможностью сравнения снятых изображений с эталонными изображениями сантехнического изделия для обнаружения различий между ними. Блок управления также может быть выполнен с возможностью получения реальных измерений из полученных изображений и сравнения реальных измерений со стандартными размерами для обнаружения различий между ними (в частности, различий между эталонными допусками). Блок управления также может быть выполнен с возможностью сравнения полученных изображений (или их частей) с изображениями типичных дефектов для обнаружения дефектности в осматриваемом сантехническом изделии.
Таким образом, устройство согласно данному изобретению способно обеспечивать автоматическую проверку сантехнического изделия с хорошим уровнем надежности.
Предпочтительно автоматический манипулятор содержит робота. Предпочтительно автоматический манипулятор образует (или представляет собой) роботизированный манипулятор. Роботизированный манипулятор имеет несколько степеней свободы (предпочтительно по меньшей мере пять степеней свободы или по меньшей мере шесть степеней свободы) для перемещения между рабочими положениями. В одном варианте выполнения роботизированный манипулятор содержит основание и головку (то есть он проходит между основанием и головкой). Основание является функционально неподвижным. Другими словами, основание выполнено с возможностью закрепления на плоской опорной поверхности. Головка является функционально подвижной. Более конкретно, головка выполнена с возможностью перемещения относительно основания, предпочтительно с возможностью перемещения при (по меньшей мере) пяти степенях свободы.
В одном варианте выполнения устройство содержит по меньшей мере один осветитель, выполненный с возможностью освещения осматриваемого сантехнического изделия, размещенного в положении осмотра (то есть на опорном средстве).
В одном варианте выполнения указанный по меньшей мере один осветитель установлен на автоматическом манипуляторе. В одном варианте выполнения указанный по меньшей мере один осветитель установлен на головке роботизированного манипулятора.
В одном варианте выполнения блок управления выполнен с возможностью приема входных данных. Входные данные отражают тип осматриваемого сантехнического изделия. Тип может включать вид сантехнического изделия (например умывальник, душевой поддон или унитаз) и/или конкретную модель. В одном варианте выполнения входные данные могут также отражать требуемое качество сантехнического изделия (например первый сорт или второй сорт).
В одном варианте выполнения блок управления выполнен с возможностью выбора эталонных данных из базы данных в зависимости от входных данных. Блок управления выполнен с возможностью обращения к базе данных в зависимости от входных данных для получения эталонных данных.
В одном варианте выполнения блок управления выполнен с возможностью приведения автоматического манипулятора в заданную последовательность рабочих положений из набора рабочих положений в зависимости от входных данных.
В одном варианте выполнения опорное средство содержит поворотную платформу, которая поворачивается вокруг вертикальной поворотной оси. В одном варианте выполнения блок управления выполнен с возможностью управления автоматическим (или роботизированным) манипулятором согласованно (одновременно) с опорным средством (то есть поворотной платформой). В одном варианте выполнения поворотная платформа выполнена с возможностью поддержания сантехнического изделия в положении осмотра. В одном варианте выполнения в положении осмотра сантехническое изделие опирается на поворотную платформу.
В варианте выполнения, в котором опорное средство содержит поворотную платформу, блок управления выполнен с возможностью обеспечения поворота опорного средства в зависимости от входных данных. В частности, блок управления выполнен с возможностью управления автоматическим манипулятором и опорным средством согласованным образом (одновременно) в зависимости от входных данных.
В одном варианте выполнения устройство содержит набор камер, выполненных с возможностью снятия изображений. Таким образом, в одном варианте выполнения указанная по меньшей мере одна камера содержит набор камер. В одном варианте выполнения камеры связаны с автоматическим манипулятором. В одном варианте выполнения камеры установлены на головке роботизированного манипулятора.
Предпочтительно обзорные оси камер указанного набора (или некоторых из них) являются наклонными. В частности, обзорные оси камер (или некоторых из них) сходятся в одной точке (точке осмотра).
В одном варианте выполнения набор камер содержит первую группу камер, выполненную с возможностью снятия первых изображений (или сканов) сантехнического изделия. Предпочтительно камеры указанной первой группы соединены друг с другом в стерео конфигурации для снятия трехмерных изображений. Более конкретно, камеры первой группы образуют трехмерные сканеры. Таким образом, указанные первые изображения предпочтительно являются трехмерными изображениями. Здесь и ниже сделана ссылка на вариант выполнения, в котором первые изображения являются трехмерными, без ограничения при этом изобретения данным вариантом выполнения, в действительности следует отметить, что в других вариантах выполнения первые изображения (или некоторые из них) являются двухмерными.
В одном варианте выполнения набор камер содержит вторую группу камер, выполненную с возможностью снятия вторых изображений сантехнического изделия. В одном варианте выполнения указанные вторые изображения являются двухмерными. Здесь и ниже сделана ссылка на вариант выполнения, в котором вторые изображения являются двухмерными, без ограничения при этом изобретения данным вариантом выполнения, в действительности следует отметить, что в других вариантах выполнения вторые изображения (или некоторые из них) являются трехмерными.
В одном варианте выполнения камеры первой группы могут совпадать с камерами второй группы, в частности, одни и те же камеры обеспечивают снятие двухмерных изображений, а при соединении в стерео конфигурации -снятие трехмерных изображений.
В одном варианте выполнения устройство содержит набор осветителей, выполненный с возможностью освещения осматриваемого сантехнического изделия. В одном варианте выполнения набор осветителей связан с автоматическим манипулятором. В одном варианте выполнения набор осветителей установлен на головке роботизированного манипулятора.
Предпочтительно направления освещения осветителей (или некоторых из них) являются наклонными. Более конкретно, направления освещения осветителей (или некоторых из них) сходятся в одной точке (предпочтительно в точке осмотра).
В одном варианте выполнения набор осветителей содержит центральный осветитель и боковые осветители, расположенные сбоку от центрального осветителя. Более конкретно, набор осветителей содержит первую и вторую группы боковых осветителей, расположенные на противоположных сторонах головки относительно центрального осветителя. В одном варианте выполнения указанные первая и вторая группы осветителей симметричны относительно оси, проходящей через центральный осветитель. В одном варианте выполнения первая и вторая группы осветителей содержат по меньшей мере один осветитель. В одном варианте выполнения каждая из первой и второй групп осветителей содержит по меньшей мере два осветителя. В одном варианте выполнения каждая из первой и второй групп осветителей содержит по меньшей мере три осветителя.
В одном варианте выполнения камеры второй группы расположены вокруг центрального осветителя. В одном варианте выполнения камеры второй группы расположены между указанными первой и второй группами боковых осветителей. Более конкретно, вторая группа камер содержит четыре камеры, расположенные симметрично вокруг центрального осветителя.
В одном варианте выполнения камеры первой группы расположены на противоположных сторонах головки, снаружи от боковых осветителей. Более конкретно, камеры первой группы содержат по меньшей мере первую камеру и по меньшей мере вторую камеру (в одном варианте выполнения по меньшей мере первую пару камер и по меньшей мере вторую пару камер). Таким образом, первая и вторая группы боковых осветителей расположены между камерами указанной первой группы камер. Более конкретно, первая группа боковых осветителей расположена между центральным осветителем и первой камерой (или первой парой камер) первой группы камер, а вторая группа боковых осветителей расположена между центральным осветителем и второй камерой (или второй парой камер) первой группы камер.
В одном варианте выполнения набор осветителей содержит структурированный осветитель, выполненный с возможностью проецирования структурированного света на осматриваемое сантехническое изделие. Более конкретно, структурированный осветитель может быть образован экраном, выполненным с возможностью отображения заданного узора (например линейного узора). Экран снабжен подсветкой. Таким образом, структурированный осветитель выполнен с возможностью проецирования заданного узора на поверхность осматриваемого сантехнического изделия.
В одном варианте выполнения камеры в указанном наборе содержат одну или более камер (в первой группе и/или во второй группе или в дополнительной группе), выполненных с возможностью регистрации света, отраженного от поверхности сантехнического изделия (данный свет проецируется на поверхность сантехнического изделия структурированным осветителем, то есть экраном), для обнаружения дефектов отражения поверхности с помощью дефлектометрии.
В одном варианте выполнения блок управления выполнен с возможностью выборочного включения одного или более осветителей в зависимости от входных данных и/или трехмерных изображений. В другом варианте выполнения осветители остаются включенными в течение всего времени осмотра.
В одном варианте выполнения блок управления выполнен с возможностью включения первой группы камер для снятия трехмерных изображений сантехнического изделия и последующей обработки указанных трехмерных изображений. В одном варианте выполнения блок управления выполнен с возможностью выборочного включения одной или более камер второй группы и/или одного или более осветителей из набора в заданной последовательности в зависимости от входных данных и/или трехмерных изображений. Блок управления выполнен с возможностью управления перемещением роботизированного манипулятора с занятием последовательности заданных рабочих положений в зависимости от входных данных и/или трехмерных изображений. Более конкретно, блок управления выполнен с возможностью выборочного включения одной или более камер второй группы и/или одного или более осветителей из набора в заданной последовательности, согласованной с перемещением роботизированного манипулятора, таким образом, что в каждом рабочем положении, в котором находится роботизированный манипулятор, одна или более камер и/или один или более осветителей включены для снятия по меньшей мере одного изображения поверхности сантехнического изделия. Предпочтительно блок управления выбирает рабочие положения, в которые приводится роботизированный манипулятор (а значит, положения, в которых включены один или более осветителей и одна или более камер), в зависимости от входных данных (в том числе типа осматриваемого сантехнического изделия и/или параметров осмотра, выбранных пользователем). Предпочтительно блок управления выбирает рабочие положения, в которые приводится роботизированный манипулятор (а значит, положения, в которых включены один или более осветителей и одна или более камер), в зависимости от трехмерных изображений, снятых первой группой камер. Фактически данные трехмерные изображения указывают тип сантехнического изделия, при этом блок управления также может быть выполнен с возможностью выявления на трехмерных изображениях одной или более критических зон сантехнического изделия (или его поверхности), для которых рекомендуется провести дальнейший (более глубокий) анализ. Фактически камеры второй группы предпочтительно имеют более высокое разрешение, чем камеры первой группы.
В одном варианте выполнения устройство содержит излучатель (по меньшей мере один). В одном варианте выполнения излучатель представляет собой микрофон (и, таким образом, выполнен с возможностью излучения акустической волны). В одном варианте выполнения излучатель представляет собой акселерометр. В одном варианте выполнения излучатель связан с автоматическим манипулятором (в частности, он установлен на головке роботизированного манипулятора). В другом варианте выполнения излучатель выполнен отдельно от автоматического манипулятора. Излучатель выполнен с возможностью излучения волны (например акустической волны), направленной на осматриваемое сантехническое изделие.
В одном варианте выполнения устройство содержит датчик, выполненный с возможностью приема волны, отраженной от сантехнического изделия (или от его поверхности), и генерации сигнала, представляющего отражение волны на осматриваемом сантехническом изделии. Блок управления выполнен с возможностью приема сигнала, представляющего отражение волны на осматриваемом сантехническом изделии, и обработки указанного сигнала, представляющего отражение волны, для предоставления диагностической информации. В частности, отражение акустической волны полезно для обнаружения дефектов, таких как разломы и небольшие трещины (которые трудно обнаружить невооруженным глазом или с помощью камер).
В одном варианте выполнения набор камер содержит по меньшей мере одну убираемую камеру, выполненную с возможностью перемещения между убранным положением, в котором она находится в головке роботизированного манипулятора, и выдвинутым положением, в котором она выступает из головки роботизированного манипулятора. Указанная по меньшей мере одна убираемая камера особенно подходит для осмотра скрытых зон сантехнического изделия - например, под ободом. В одном варианте выполнения блок управления выполнен с возможностью согласования перемещения роботизированного манипулятора с перемещением указанной по меньшей мере одной убираемой камеры между убранным положением и выдвинутым положением в зависимости от входных данных и/или изображений, снятых первой группой камер. В одном варианте выполнения блок управления выполнен с возможностью подачи команды на выдвигание убираемой камеры в зависимости от входных данных и/или трехмерных изображений.
В одном варианте выполнения блок управления выполнен с возможностью создания трехмерной визуализации осматриваемого сантехнического изделия в зависимости от снятых изображений (то есть на их основе).
В одном варианте выполнения эталонные данные содержат эталонные (или стандартные) размеры для осматриваемого сантехнического изделия. В одном варианте выполнения диагностическая информация содержит (диагностическую) информацию, относящуюся к размерной дефектности. В одном варианте выполнения блок управления выполнен с возможностью получения реальных размеров осматриваемого сантехнического изделия из трехмерной визуализации и/или из снятых изображений.
Например, реальные размеры (и соответствующие эталонные размеры) для унитаза могут содержать один или более из следующих размеров: высоту, ширину, глубину обода, глубину подошвы, положение отверстий для крепления сиденья, высоту оси отверстия для подачи воды относительно пола. Для опорной стойки умывальника реальные размеры (и соответствующие эталонные размеры) могут содержать один или более из следующих размеров: высоту, ширину основания, глубину основания, ширину зоны соединения с умывальной раковиной.
В одном варианте выполнения блок управления выполнен с возможностью сравнения реальных размеров с соответствующими эталонными размерами из набора эталонных размеров.
В одном варианте выполнения блок управления выполнен с возможностью получения информации, относящейся к размерной дефектности, в зависимости от разницы между реальными размерами и эталонными размерами.
В одном варианте выполнения эталонные данные содержат для эталонных размеров соответствующее размерные допуски. В частности, для размеров деталей, которые не видны при использовании, допустимы более высокие допуски. В одном варианте выполнения размерные допуски могут быть выбраны пользователем в зависимости от требуемого качества сантехнического изделия (например первый сорт или второй сорт). В свете этого блок управления выполнен с возможностью пометки сантехнического изделия как дефектного, если разница между реальным размером (или измерением) и соответствующим эталонным размером (или измерением) превышает соответствующий допуск.
Информация, относящаяся к размерной дефектности, представляет наличие или отсутствие одного или более из следующих дефектов: неправильная форма, несовершенная плоскостность плоской поверхности сантехнического изделия, несовершенная перпендикулярность между перпендикулярными плоскими поверхностями сантехнического изделия, коробление (или отсутствие симметрии), несовершенная прямолинейность края сантехнического изделия.
В одном варианте выполнения эталонные данные содержат эталонную модель. Эталонная модель может представлять собой эталонное сантехническое изделие без дефектов и/или дефектное сантехническое изделие.
В одном варианте выполнения эталонные данные содержат для снятых изображений соответствующее эталонные изображения, представляющие эталонное сантехническое изделие, не имеющее дефектов. Эталонные изображения образуют возможный пример эталонной модели. В одном варианте выполнения эталонные данные содержат трехмерную визуализацию эталонного сантехнического изделия (без дефектов), при этом данная трехмерная визуализация образует еще один пример эталонной модели.
В одном варианте выполнения диагностическая информация содержит (диагностическую) информацию, относящуюся к дефектности поверхности.
В одном варианте выполнения блок управления выполнен с возможностью сравнения снятых изображений с эталонной моделью, в частности с соответствующими эталонными изображениями из набора эталонных изображений, и/или с возможностью сравнения трехмерной визуализации осматриваемого сантехнического изделия (полученной блоком управления) с трехмерной визуализацией эталонного сантехнического изделия.
В одном варианте выполнения блок управления выполнен с возможностью получения информации о дефектности поверхности в зависимости от сравнения между снятыми изображениями и соответствующими эталонными изображениями.
В одном варианте выполнения информация, относящаяся к дефектности поверхности, отражает (или указывает на) наличие или отсутствие дефектов формования, деформаций или отделки поверхности изделия (в случае заготовки изделия в пластичном состоянии и/или высушенного изделия) и/или (в случае готового изделия) одного или более из следующих дефектов поверхности (или типов дефектов поверхности) на поверхности сантехнического изделия: проколов, крапинок, вкраплений, комков, пузырей, вздутий, пятен, дефектов цвета, плохой отделки, трещин, растрескивания.
В частности, дефекты поверхности могут влиять на керамический корпус и/или глазурь сантехнического изделия. Более конкретно: информация, относящаяся к дефектности поверхности, представляет (то есть указывает на) наличие или отсутствие одного или более из следующих дефектов поверхности (или типов дефектов поверхности) на поверхности сантехнического изделия: шероховатость, пузыри (или блистеры), питтинг, волосные трещины (то есть мелкие трещины размером от 50 до 100 микрон в глазури), растрескивание (трещины в керамическом корпусе и глазури размером от 50 до 100 микрон), трещины, коробление поверхности (разрушенные части поверхности), тяжелая глазурь (то есть части, где глазури больше, чем необходимо, по сравнению с эталонной поверхностью), «выколки» (то есть неоднородность глазури в виде небольшой ямки размером от 0.5 до 1 мм), пузыри (то есть чрезмерная шероховатость поверхности), пятна (то есть зоны, где цвет отличается от цвета остальной поверхности), тонкая глазурь (то есть недостаточное количество глазури для предотвращения обнажения керамического корпуса), усадка глазури (то есть зоны, в которых глазурь дала усадку во время обжига, обнажая керамический корпус), отсутствие или дефекты логотипа, плохая отделка (например бугорки, гребни или заусенцы), «яичная скорлупа» (то есть необычная шероховатость поверхности глазури, подобная яичной скорлупе), «апельсиновая корка» (необычная шероховатость поверхности глазури создает эффект апельсиновой корки), волнистость глазури, шелушение (то есть глазурь отслаивается хлопьями), тусклая глазурь.
В одном варианте выполнения эталонные данные содержат допуск для каждого дефекта (или типа дефекта). В одном варианте выполнения эталонные данные содержат допуск для каждой поверхности сантехнического изделия и для каждого дефекта (или типа дефекта). Например, для каждой поверхности сантехнического изделия эталонные данные могут содержать соответствующую классификацию на видимую, полувидимую или скрытую поверхность (указывающую, является ли поверхность видимой, полувидимой или скрытой от глаз при использовании сантехнического изделия), таким образом, для каждого типа дефекта эталонные данные могут содержать первый допуск, когда поверхность видима, второй допуск, когда поверхность полувидима, и третий допуск, когда поверхность скрыта. Как правило, для скрытой поверхности принимаются большие допуски, тогда как для видимой поверхности применяются жесткие допуски.
В одном варианте выполнения блок управления выполнен с возможностью получения идентификационного кода для идентификации сантехнического изделия. Более конкретно, блок управления может быть выполнен с возможностью считывания идентификационного кода, нанесенного на сантехническое изделие (например штрихкода или QR-кода), при помощи указанной по меньшей мере одной камеры. В одном варианте выполнения блок управления выполнен с возможностью получения идентификационного кода сантехнического изделия от пользователя. В одном варианте выполнения блок управления выполнен с возможностью присвоения последовательного идентификационного кода каждому осматриваемому сантехническому изделию.
В одном варианте выполнения блок управления выполнен с возможностью создания отчетного документа, содержащего диагностическую информацию, связанную с идентификационным кодом сантехнического изделия.
В одном варианте выполнения устройство содержит средство проверки вакуумной герметичности. Средство проверки вакуумной герметичности выполнено с возможностью создания вакуума в одном или более внутренних пространствах сантехнического изделия и измерения (отрицательного) давления в указанных одном или более внутренних пространствах. Во время проверки вакуумной герметичности любые отверстия, такие как, например, выход для слива воды, вход для подачи воды или чаша, загерметизированы. Проверка вакуумной герметичности полезна для обнаружения скрытых дефектов во внутренних пространствах.
В одном варианте выполнения устройство содержит дополнительный автоматический манипулятор. В одном варианте выполнения дополнительный автоматический манипулятор представляет собой дополнительный роботизированный манипулятор (имеющий предпочтительно по меньшей мере 5 степеней свободы). В одном варианте выполнения дополнительный автоматический манипулятор выполнен с возможностью размещения осматриваемого сантехнического изделия в положение осмотра на опорном средстве и удаления сантехнического изделия из положения осмотра. Более конкретно, дополнительный автоматический манипулятор выполнен с возможностью подъема сантехнического изделия с плоской опорной поверхности подачи, его перемещения и размещения на поворотной платформе, а также последующего подъема с поворотной платформы, перемещения и возвращения на плоскую опорную поверхность подачи.
В одном варианте выполнения блок управления запрограммирован на управление автоматическим манипулятором и дополнительным автоматическим манипулятором согласованно друг с другом.
В одном варианте выполнения указанная по меньшей мере одна камера выполнена с возможностью снятия по меньшей мере одного изображения осматриваемого сантехнического изделия во время его подъема дополнительным механическим манипулятором, чтобы также обеспечить возможность осмотра поверхностей сантехнического изделия, которые остаются скрытыми, когда оно находится в положении осмотра.
В данном изобретении также предложен способ оптического осмотра сантехнических изделий.
Способ включает этап размещения осматриваемого сантехнического изделия на опорном средстве в положении осмотра.
Способ включает этап перемещения автоматического манипулятора между набором рабочих положений. В одном варианте выполнения этап перемещения выполняют при по меньшей мере пяти степенях свободы автоматического манипулятора (автоматический манипулятор образует роботизированный манипулятор).
Способ включает этап снятия изображений осматриваемого сантехнического изделия с помощью по меньшей мере одной камеры, причем указанная по меньшей мере одна камера связана с автоматическим манипулятором (указанная по меньшей мере одна камера установлена на головке роботизированного манипулятора).
Способ включает этап обработки изображений в зависимости от эталонных данных для получения диагностической информации о дефектности сантехнического изделия.
В одном варианте выполнения способ включает этап освещения сантехнического изделия, расположенного в положении осмотра, с помощью по меньшей мере одного осветителя, установленного на головке роботизированного манипулятора.
В одном варианте выполнения этап снятия включает первый подэтап снятия первых изображений сантехнического изделия (в одном варианте выполнения указанные первые изображения представляют собой трехмерные изображения, полученные с помощью 3D-камер или сканеров). В одном варианте выполнения этап снятия включает второй подэтап снятия вторых изображений одной или более критических зон сантехнического изделия (в одном варианте выполнения указанные вторые изображения представляют собой двухмерные изображения, снятые с помощью традиционных камер).
В одном варианте выполнения способ включает этап обработки трехмерных изображений, снятых на указанном первом подэтапе, для выявления одной или более критических зон сантехнического изделия. Таким образом, указанный первый подэтап полезен для идентификации критических зон, в которых могут иметься дефекты, при этом указанный второй подэтап сфокусирован на данных критических зонах. В сущности, снятые на втором подэтапе изображения являются более детальными (поскольку они сосредоточены на меньших зонах и/или сняты при помощи камер с более высоким разрешением), чем изображения, полученные на первом подэтапе.
В одном варианте выполнения способ включает этап размещения сантехнического изделия с возможностью поддержания в положении осмотра на поворотной платформе опорного средства. В одном варианте выполнения способ содержит этап поворота поворотной платформы опорного средства вокруг вертикальной оси. Предпочтительно этап поворота согласован с этапом перемещения автоматического манипулятора.
В одном варианте выполнения в каждом рабочем положении из набора рабочих положений, в которых располагают автоматический манипулятор, снимают по меньшей мере одно изображение.
В одном варианте выполнения способ включает этап включения первой группы камер для снятия первых изображений сантехнического изделия. В одном варианте выполнения первые изображения являются трехмерными изображениями.
В одном варианте выполнения способ включает этап обработки первых изображений и этап выборочного включения одной или более камер из второй группы камер в зависимости от первых изображений. В одном варианте выполнения способ также включает этап включения одного или более осветителей из набора одновременно с включением первой и/или второй групп камер. В одном варианте выполнения способ включает этап управления автоматическим (или роботизированным) манипулятором в зависимости от первых изображений (согласованно с включением камер и/или осветителей).
В одном варианте выполнения способ включает этап извлечения убираемой камеры, выполненной с возможностью перемещения между убранным положением, в котором она находится в головке роботизированного манипулятора, и выдвинутым положением, в котором она выступает из головки роботизированного манипулятора. Предпочтительно этап извлечения выполняют согласованно с этапом перемещения роботизированного манипулятора. Таким образом, возможен осмотр скрытых зон сантехнического изделия, таких как, например, зоны под ободом.
В одном варианте выполнения способ включает этап проецирования структурированного света на осматриваемое сантехническое изделие с помощью (по меньшей мере одного) структурированного осветителя.
В одном варианте выполнения способ включает этап излучения волны (например акустической волны), направленной на осматриваемое сантехническое изделие, и этап захвата волны, отраженной поверхностью сантехнического изделия. Способ включает последующий этап обработки сигнала, представляющего отраженную волну (или отражение волны), для получения диагностической информации.
В одном варианте выполнения способ включает этап создания трехмерной (цифровой) визуализации осматриваемого сантехнического изделия в зависимости от снятых изображений.
В одном варианте выполнения способ включает этап получения реальных размеров осматриваемого сантехнического изделия из трехмерной визуализации.
В одном варианте выполнения способ включает этап сравнения реальных размеров с соответствующими эталонными размерами из набора эталонных размеров и этап получения диагностической информации, относящейся к размерной дефектности в зависимости от разницы между реальными размерами и эталонными размерами.
В одном варианте выполнения способ включает этап сравнения одного или более изображений из набора снятых изображений с соответствующими эталонными изображениями для получения информации, относящейся к дефектности поверхности, в зависимости от сравнения между снятыми изображениями и соответствующими эталонными изображениями.
В одном варианте выполнения способ включает этап поступления в блок управления входных данных, представляющих тип сантехнического изделия. В одном варианте выполнения способ включает этап обращения к базе данных в зависимости от входных данных для получения эталонных данных.
В одном варианте выполнения автоматический манипулятор приводят в заданную последовательность рабочих положений из набора рабочих положений в зависимости от входных данных.
В одном варианте выполнения способ включает этап поступления в блок управления идентификационного кода сантехнического изделия. В одном варианте выполнения способ включает этап создания отчетного документа, содержащего диагностическую информацию. Предпочтительно отчетный документ связывает диагностическую информацию с идентификационным кодом сантехнического изделия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие особенности станут более очевидными из нижеследующего подробного описания предпочтительного варианта выполнения, изображенного в качестве неограничивающего примера на прилагаемых чертежах, на которых:
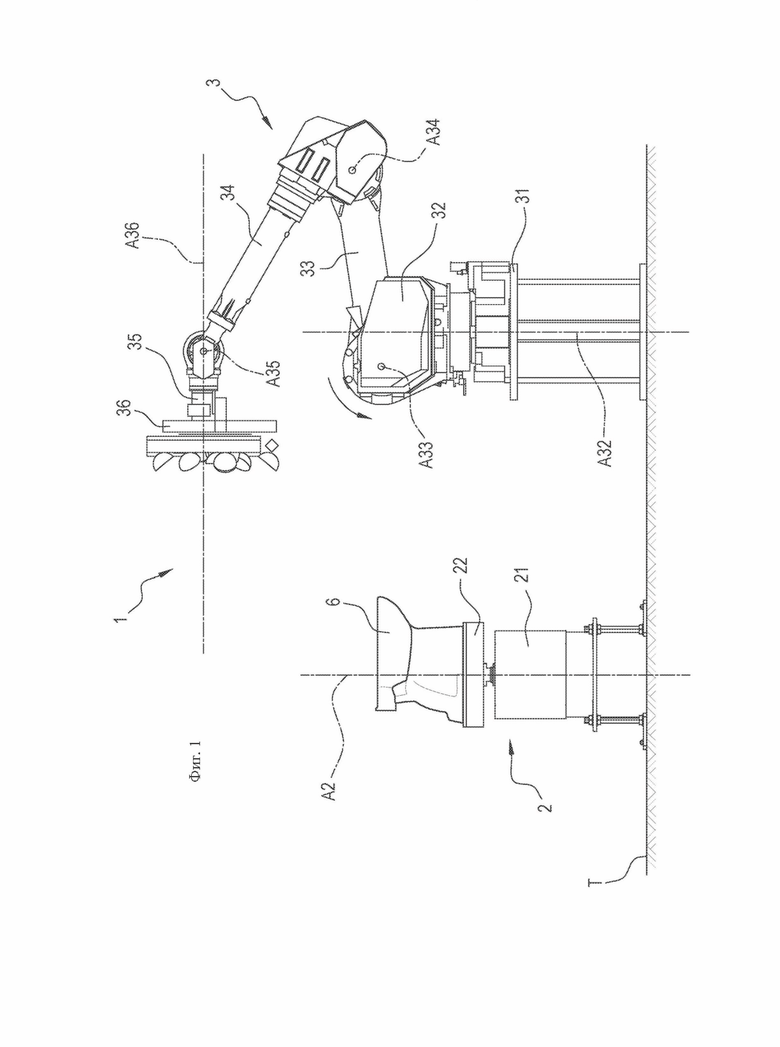
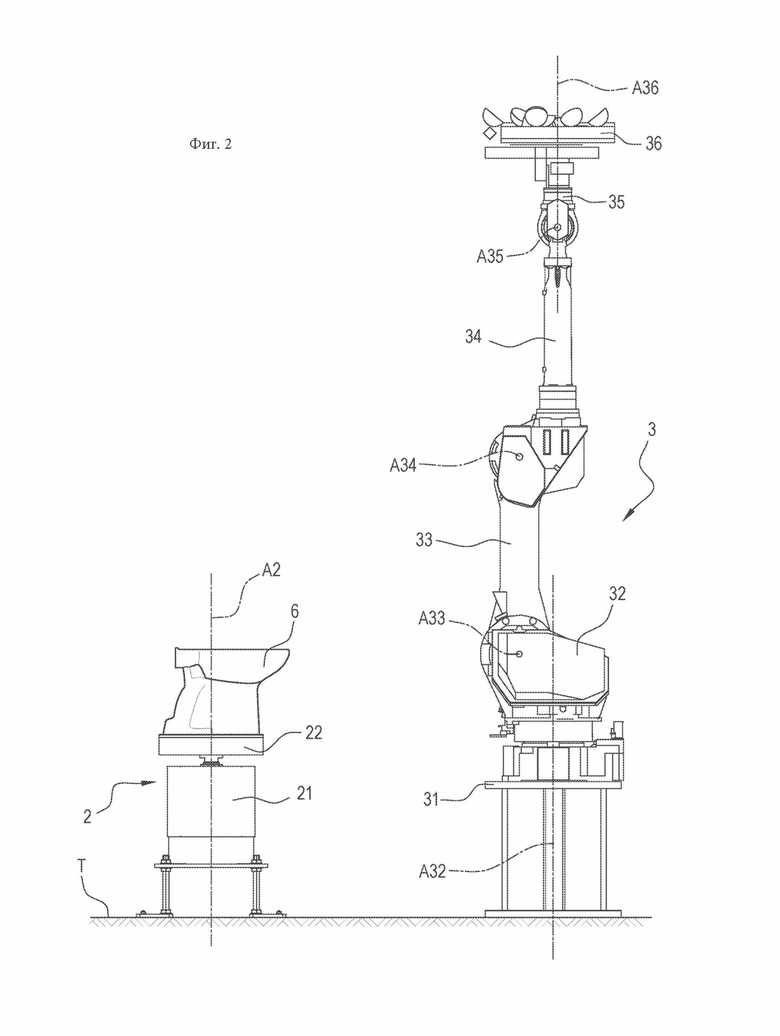
фиг. 1 и 2 изображают виды сбоку, показывающие устройство для оптического осмотра сантехнического изделия согласно данному изобретению соответственно в положении покоя и в выдвинутом положении,
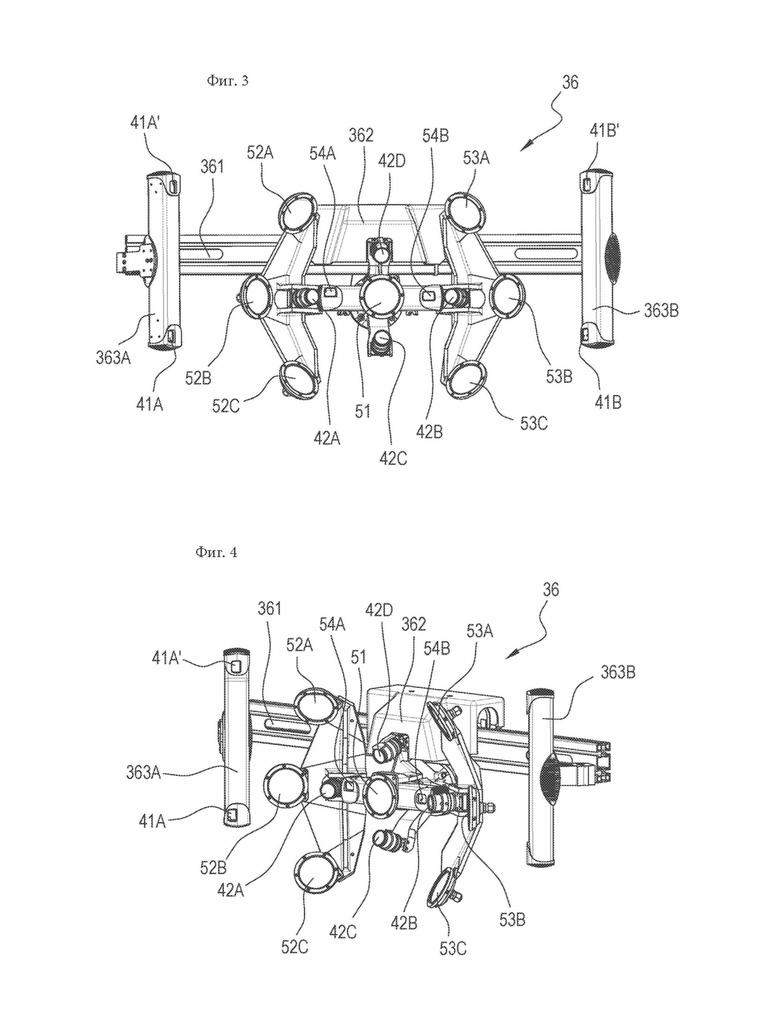
фиг. 3 и 4 изображают вид спереди и вид в аксонометрии головки роботизированного манипулятора в варианте выполнения устройства, показанного на фиг. 1,
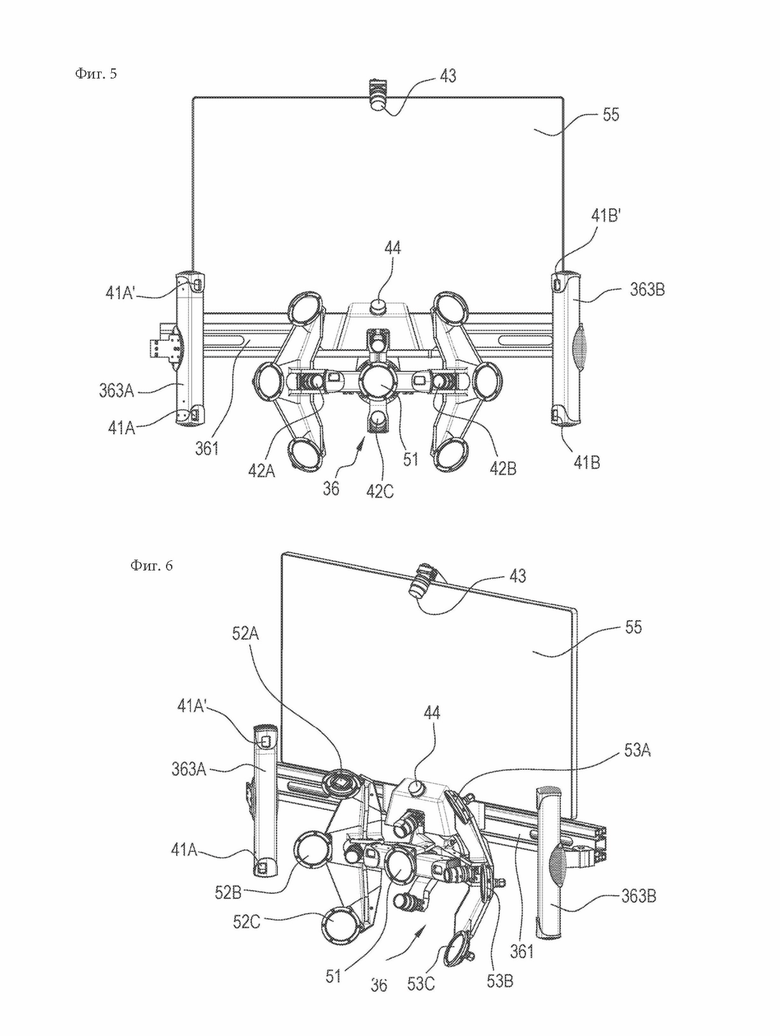
фиг. 5 и 6 изображают вид спереди и вид в аксонометрии головки роботизированного манипулятора в другом варианте выполнения устройства, показанного на фиг. 1,
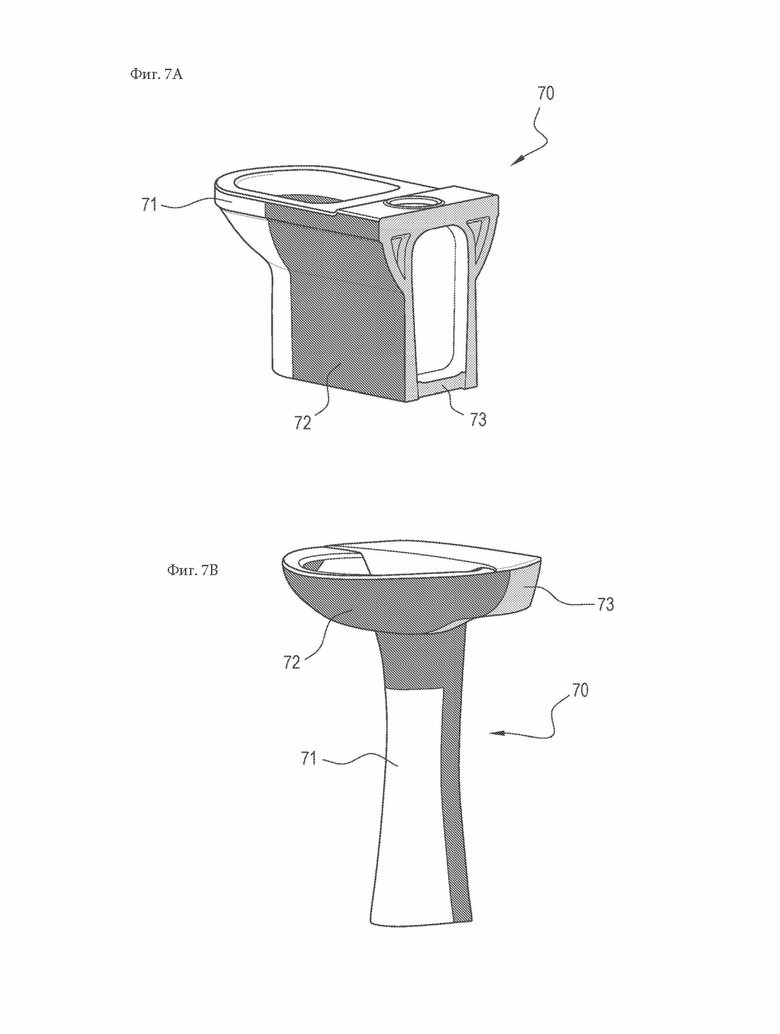
фиг. 7А и 7В изображают сантехническое изделие в соответствующих трехмерных визуализациях, созданных устройством,
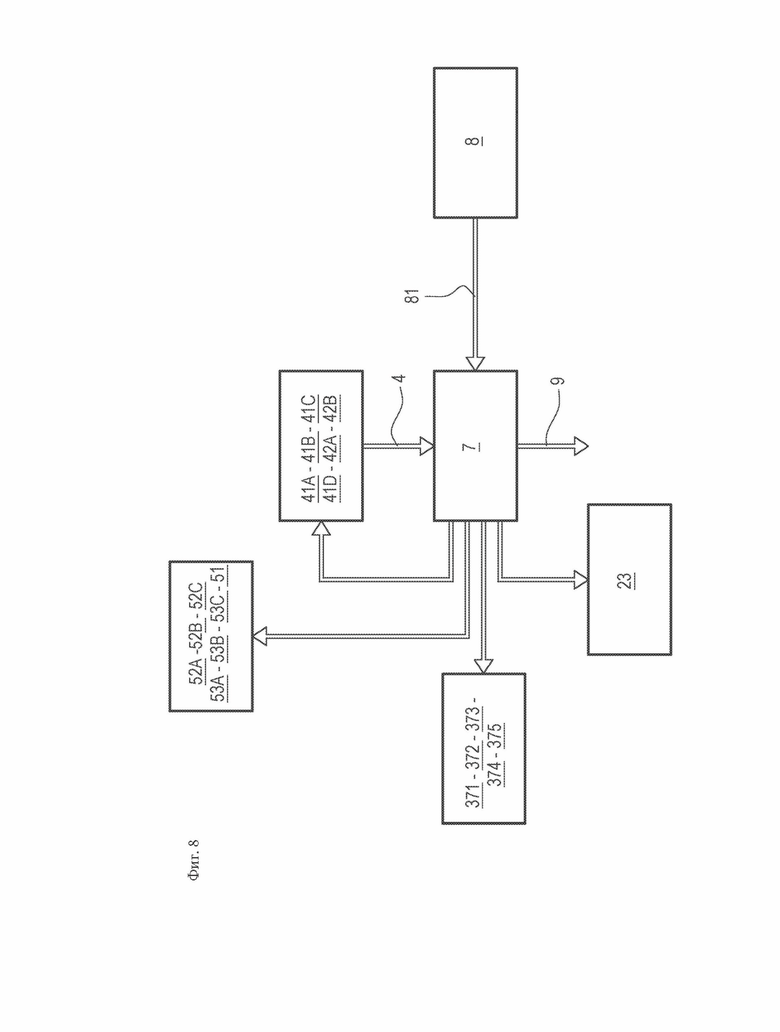
фиг. 8 схематически иллюстрирует работу устройства, показанного на фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Со ссылкой на прилагаемые чертежи номером 1 позиции обозначено устройство для оптического осмотра сантехнического изделия.
Устройство 1 содержит опорное средство 2, выполненное с возможностью размещения на нем осматриваемого сантехнического изделия 6 в положении осмотра. Опорное средство 2 содержит основание 21. Основание 21 выполнено с возможностью крепления к плоской опорной поверхности (или полу Т). Таким образом, основание 21 функционально закреплено относительно пола Т. Опорное средство 2 содержит платформу 22, выполненную с возможностью поддержания сантехнического изделия 6. Платформа 22 с возможностью вращения (или поворота) соединена с основанием 21 для обеспечения поворота относительно него вокруг поворотной оси А2. Поворотная ось А2 расположена вертикально (параллельно направлению силы веса). Опорное средство 2 содержит поворотное приводное средство 23, предназначенное для поворота платформы 22 относительно основания 21.
Устройство 1 содержит роботизированный манипулятор 3. Роботизированный манипулятор 3 содержит основание 31. Основание 31 выполнено с возможностью крепления к плоской опорной поверхности (или полу Т). Таким образом, основание 31 функционально закреплено относительно пола Т.
Роботизированный манипулятор 3 содержит поворотный элемент 32.
Поворотный элемент 32 с возможностью вращения (или поворота) соединен с основанием 31 для поворота относительно него вокруг первой поворотной оси А32. В частности, поворотный элемент 32 выполнен с возможностью совершения полного оборота вокруг указанной первой поворотной оси A32 (поворота на 360°). В одном варианте выполнения поворотный элемент 32 выполнен с возможностью поворота вокруг первой поворотной оси А32 в первом направлении поворота и во втором направлении поворота, противоположном первому направлению.
Первая поворотная ось A32 расположена вертикально (параллельно направлению силы веса). Роботизированный манипулятор 3 содержит первое поворотное приводное средство 371, предназначенное для поворота поворотного элемента 32 относительно основания 31. Поворот элемента 32 относительно основания 31 определяет первую степень свободы манипулятора 3.
Роботизированный манипулятор 3 содержит первую конечность 33. Первая конечность 33 шарнирно (или с возможностью поворота) соединена с поворотным элементом 32. Первая конечность 33 выполнена с возможностью поворота вокруг второй поворотной оси А33 относительно поворотного элемента 32. Вторая поворотная ось А33 расположена горизонтально (под прямым углом к направлению силы веса). Вторая ось А33 выполнена с возможностью поворота (в горизонтальной плоскости поворота) совместно с поворотным элементом 33. Роботизированный манипулятор 3 содержит второе поворотное приводное средство 372, предназначенное для поворота первой конечности 33 относительно поворотного элемента 32. Поворот первой конечности 33 относительно элемента 32 определяет вторую степень свободы манипулятора 3.
Роботизированный манипулятор 3 содержит вторую конечность 34. Вторая конечность 34 шарнирно (или с возможностью поворота) соединена с первой конечностью 33. Вторая конечность 34 выполнена с возможностью поворота вокруг третьей поворотной оси A3 4 относительно первой конечности 33. Третья поворотная ось А34 расположена горизонтально (под прямым углом к направлению силы веса). Третья ось А34 выполнена с возможностью поворота в горизонтальных плоскостях совместно с поворотом элемента 32 и с возможностью поступательного перемещения между разными горизонтальными плоскостями вследствие перемещения первой конечности 33. Роботизированный манипулятор 3 содержит третье поворотное приводное средство 373, предназначенное для поворота второй конечности 34 относительно первой конечности 33. Поворот второй конечности 34 относительно первой конечности 33 определяет третью степень свободы манипулятора 3.
Роботизированный манипулятор 3 содержит предварительную головку 35. Предварительная головка 35 шарнирно (или с возможностью поворота) соединена со второй конечностью 34. Предварительная головка 35 выполнена с возможностью поворота вокруг четвертой поворотной оси A35 относительно второй конечности 34. Четвертая поворотная ось А35 расположена горизонтально (под прямым углом к направлению силы веса). Четвертая поворотная ось A35 выполнена с возможностью поворота в горизонтальных плоскостях совместно с поворотом поворотного элемента 32 и с возможностью поступательного перемещения между разными горизонтальными плоскостями вследствие перемещения первой конечности 33 и второй конечности 34. Роботизированный манипулятор 3 содержит четвертое поворотное приводное средство 374, предназначенное для поворота предварительной головки 35 относительно второй конечности 34. Поворот предварительной головки 35 относительно второй конечности 34 определяет четвертую степень свободы манипулятора 3.
Роботизированный манипулятор 3 содержит головку 36. Головка 36 с возможностью вращения (или поворота) соединена с предварительной головкой 35. Головка 36 выполнена с возможностью поворота вокруг пятой поворотной оси А36. В одном варианте выполнения головка 36 выполнена с возможностью совершения полного оборота вокруг пятой оси А36 (поворота на 360°). В одном варианте выполнения головка 36 выполнена с возможностью поворота вокруг пятой оси А36 в первом направлении поворота и во втором направлении поворота, противоположном указанному первому направлению. Роботизированный манипулятор 3 содержит пятое поворотное приводное средство 375, предназначенное для поворота головки 36 относительно предварительной головки 35. Поворот головки 36 относительно предварительной головки 35 определяет пятую степень свободы манипулятора 3.
В одном варианте выполнения указанные первое, второе, третье, четвертое и пятое поворотные приводные средства 371, 372, 373, 374 и 375 и приводное средство 23 платформы являются пневматическими приводными средствами, а в другом варианте выполнения они являются гидравлическими приводными средствами.
Роботизированный манипулятор 3 выполнен с возможностью перемещения между рабочими положениями (или конфигурациями) с помощью первого, второго, третьего, четвертого и пятого приводных средств 371, 372, 373, 374 и 375. Более конкретно, в каждом из рабочих положений головка 36 направлена на сантехническое изделие, расположенное в положении осмотра, для осмотра сантехнического изделия 6. Роботизированный манипулятор 3 также выполнен с возможностью перемещения между нерабочими положениями, в которых головка 36 не направлена на сантехническое изделие 6 в положении осмотра для обеспечения возможностью размещения изделия 6 в положении осмотра (не мешая ему) или проведения испытаний или технического обслуживания манипулятора 3. В качестве неограничивающего примера на фиг. 1 показан роботизированный манипулятор 3 в первом нерабочем положении (в конфигурации покоя), а на фиг. 2 показан роботизированный манипулятор 3 во втором нерабочем положении (в выдвинутой конфигурации).
Головка 36 содержит опорный стержень 361. Опорный стержень 361 выполнен с возможностью поворота относительно предварительной головки 35.
Головка 36 содержит опорное средство 362, соединенное с опорным стержнем 361. В одном варианте выполнения опорное средство 362 выполнено с возможностью скольжения (или поступательного перемещения) вдоль опорного стержня 361. В одном варианте выполнения головка 36 содержит концевое приводное средство для обеспечения скольжения опорного средства 362 вдоль стержня 361. Поступательное перемещение опорного средства 362 вдоль стрежня 361, если оно возможно, определяет шестую степень свободы роботизированного манипулятора 3.
Головка 36 содержит первое боковое опорное средство 363А, соединенное с первым концом опорного стержня 361. Головка 36 содержит второе боковое опорное средство 363В, соединенное со вторым концом опорного стержня 361, противоположным указанному первому концу. Первое и второе боковые опорные средства 363А и 363В вытянуты под прямыми углами к опорному стержню 361.
Устройство 1 содержит набор камер.
Более конкретно, устройство 1 содержит первую группу камер. В одном варианте выполнения камеры первой группы представляют собой 3D-камеры (или 3D-сканеры).
Первая группа камер содержит первую камеру 41А, установленную на первом боковом опорном средстве 363А. В одном варианте выполнения первая группа камер содержит первую пару камер 41А, 41А, установленных на первом боковом опорном средстве 363А (на противоположных концах указанного средства 363А). Первая группа камер содержит вторую камеру 41В, установленную на втором боковом опорном средстве 363В. В одном варианте выполнения первая группа камер содержит вторую пару камер 41В, 41В', установленных на втором боковом опорном средстве 363В (на противоположных концах указанного средства 363В).
Устройство 1 содержит вторую группу камер. В одном варианте выполнения камеры второй группы представляют собой 2D-камеры. Вторая группа камер содержит первую камеру 42А. В одном варианте выполнения вторая группа камер содержит вторую камеру 42В. В одном варианте выполнения вторая группа камер содержит третью камеру 42С. В одном варианте выполнения вторая группа камер содержит четвертую камеру 42D. Предпочтительно камеры 42А, 42В, 42С и 42D второй группы соединены с центральным опорным средством 362. Предпочтительно камеры 42А, 42В, 42С и 42D второй группы соединены с центральным опорным средством 362.
Устройство 1 содержит набор осветителей. Набор осветителей содержат центральный осветитель 51. Центральный осветитель 51 расположен в центре креста (на концах которого расположены камеры 42А, 42В, 42С и 42D). Набор осветителей содержит первую группу боковых осветителей, в свою очередь содержащую три осветителя 52А, 52В, 52С. Набор осветителей содержит вторую группу боковых осветителей, в свою очередь содержащую три осветителя 53А, 53В, 53С. Первая группа боковых осветителей 52А, 52В, 52С расположена между первой камерой 42А второй группы и первой камерой 41А первой группы. Вторая группа боковых осветителей 53А, 53В, 53С расположена между третьей камерой 42С второй группы и второй камерой 41В первой группы.
В одном варианте выполнения устройство 1 (или набор осветителей) содержит экран 55. Экран 55 установлен на головке 36. Экран 55 может быть установлен на головке с возможностью съема. Экран 55 выполнен с возможностью проецирования заданного узора (например последовательности параллельных линий) на поверхность осматриваемого сантехнического изделия. Таким образом, экран 55 представляет собой структурированный осветитель.
В варианте выполнения, содержащем экран 55, набор камер также содержит по меньшей мере первую экранную камеру 43. Набор камер может также содержать вторую экранную камеру 44. Первая экранная камера 43 и, в случае наличия, вторая экранная камера 44 выполнены с возможностью захвата света, отраженного поверхностью сантехнического изделия (данный свет проецируется на поверхность сантехнического изделия с помощью экрана 55), для обнаружения дефектов отражательной способности поверхности с помощью дефлектометрии. Первая экранная камера 43 и вторая экранная камера 44 предпочтительно расположены на краях экрана (например на верхнем крае и нижнем крае или на боковых краях) и имеют сходящиеся обзорные оси.
Предпочтительно камеры 41А, (41А), 42А, (42А) первой группы имеют сходящиеся обзорные оси.
Предпочтительно камеры 42А, 42В, 42С и 42D второй группы имеют сходящиеся обзорные оси.
Предпочтительно центральный осветитель 51 и боковые осветители 52А, 52В, 52С, 53А, 53В, 53С имеют сходящиеся направления освещения.
В одном варианте выполнения камеры 41А, (41А), 42А, (42А) первой группы, камеры 42А, 42В, 42С и 42D второй группы, центральный осветитель 51 и боковые осветители 52А, 52В, 52С, 53А, 53В, 53С имеют сходящиеся направления освещения (которые сходятся на поверхности или на части поверхности) сантехнического изделия 6.
В одном варианте выполнения набор осветителей также содержит первый осветитель 54А и второй осветитель 54В, выполненные с возможностью излучения цветного света (например красного). В частности, первый осветитель 54А и второй осветитель 54В выполнены с возможностью излучения мигающего (или прерывистого) света.
Устройство 1 содержит блок 7 управления.
В одном варианте выполнения блок 7 управления выполнен с возможностью приема входных данных, представляющих тип (например марку и модель) осматриваемого сантехнического изделия 6.
В одном варианте выполнения блок 7 управления имеет доступ к базе 8 данных, содержащей эталонные данные 81. В одном варианте выполнения блок 7 управления выполнен с возможностью извлечения эталонных данных 81. В одном варианте выполнения блок 7 управления выполнен с возможностью обращения к базе данных в зависимости от входных данных.
В одном варианте выполнения эталонные данные 81 содержат одно или более рабочих положений, которые принимает роботизированный манипулятор 3 для осмотра сантехнического изделия 6.
Блок 7 управления выполнен с возможностью управления поворотной платформой 22 (на которой размещено сантехническое изделие 6) и роботизированным манипулятором 3 в зависимости от эталонных данных 81. Более конкретно, блок 7 управления выполнен с возможностью согласованного управления одним или более из следующих приводных средств: приводным поворотным средством 23 поворотной платформы 22, первым приводным средством 371 манипулятора 3, вторым приводным средством 372 манипулятора 3, третьим приводным средством 373 манипулятора 3, четвертым приводным средством 374 манипулятора 3, пятым приводным средством 375 манипулятора 3.
Блок 7 управления выполнен с возможностью включения одной или более камер из первой группы камер 41А, (41А'), 41В, (41В') для снятия изображений 4 (в одном варианте выполнения - трехмерных изображений) сантехнического изделия 6. В одном варианте выполнения блок 7 управления выполнен с возможностью приведения манипулятора 3 в первую последовательность рабочих положений, в которых первая группа камер 41А, (41А'), 41В, (41В') снимает изображения 4 сантехнического изделия 6. В одном варианте выполнения указанная первая последовательность рабочих положений является заранее заданной. В одном варианте выполнения первая последовательность рабочих положений зависит от входных данных. В одном варианте выполнения блок управления выполнен с возможностью включения одного или более осветителей из набора осветителей 51, 52А, 52В, 52С, 53А, 53В, 53С.
В одном варианте выполнения блок 7 управления выполнен с возможностью воссоздания трехмерной визуализации 70 сантехнического изделия 6 на основании снятых трехмерных изображений.
В одном варианте выполнения блок 7 управления выполнен с возможностью определения на трехмерной визуализации 70 сантехнического изделия 6 видимой зоны 71, полускрытой зоны 72 и скрытой зоны 73.
В одном варианте выполнения блок 7 управления выполнен с возможностью сравнения трехмерной визуализации 70 и/или снятых изображений 4 с соответствующими эталонными изображениями (составляющими часть эталонных данных 81) для обнаружения любых различий между ними (в размерах и/или в поверхности). В одном варианте выполнения блок 7 управления выполнен с возможностью определения критических зон в зависимости от сравнения трехмерной визуализации 70 и/или снятых изображений 4 с эталонными изображениями в зависимости от эталонных допусков (составляющих часть эталонных данных 81). Более конкретно, блок 7 управления выполнен с возможностью извлечения параметров изображения из трехмерной визуализации 70 и/или из снятых изображений 4 и сравнения их с эталонными параметрами изображения (эталонных изображений).
В одном варианте выполнения блок 7 управления выполнен с возможностью определения критических зон в зависимости от результатов сравнения. Зона считается критической, если по меньшей мере один из параметров изображения, оцененных в процессе сравнения, отличается от соответствующего параметра эталонного изображения на величину, превышающую эталонный допуск.
В частности, любые различия между снятыми изображениями 4 и/или трехмерной визуализацией 70 и эталонными изображениями оцениваются с первым эталонным допуском, если они расположены в скрытой зоне 73, со вторым эталонным допуском, если они расположены в полускрытой зоне 72, и с третьим эталонным допуском, если они расположены в видимой зоне 71. Первый эталонный допуск больше второго допуска. Второй эталонный допуск больше третьего допуска.
В одном варианте выполнения блок управления выполнен с возможностью приведения роботизированного манипулятора 3 во вторую последовательность рабочих положений и включения (в каждом рабочем положении указанной второй последовательности) одной или более камер из второй группы камер 42А, 42В, 42С, 42D и одного или более осветителей из набора осветителей 51, 52А, 52В, 52С, 53А, 53В, 53С. Указанная вторая последовательность рабочих положений такова, что вторая группа камер 42А, 42В, 42С, 42D снимает изображения 4 одной или более выявленных критических зон.
В одном варианте выполнения блок 7 управления выполнен с возможностью сравнения изображений 4, снятых второй группой камер 42А, 42В, 42С, 42D, с эталонными данными 81.
В одном варианте выполнения блок 7 управления выполнен с возможностью обновления трехмерной визуализации 70 в зависимости от изображений 4, снятых второй группой камер 42А, 42В, 42С, 42D.
В одном варианте выполнения блок 7 управления выполнен с возможностью сравнения обновленной трехмерной визуализации 70 с эталонными данными 81.
Блок 7 управления выполнен с возможностью предоставления диагностической информации 9, относящейся к дефектности сантехнического изделия 6.
Устройство 1 содержит интерфейс, выполненный с возможностью предоставления диагностической информации 9 пользователю.
В одном варианте выполнения диагностическая информация 9 задана обновленной трехмерной визуализацией 70. Фактически, путем отображения трехмерной визуализации 70 на интерфейсе пользователь может просматривать дефекты на сантехническом изделии 6.
В одном варианте выполнения диагностическая информация содержит графические знаки (например стрелки или точки) для обозначения дефектов на трехмерной визуализации 70. В одном варианте выполнения пользовательский интерфейс обеспечивает пользователю возможность последующего детального рассмотрения дефектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАЗДЕЛИТЕЛЬНАЯ УСТАНОВКА С АРХИМЕДОВЫМ ВИНТОМ ДЛЯ ОБРАБОТКИ НАВОЗНОЙ ЖИЖИ | 2011 |
|
RU2601521C2 |
| АККУМУЛЯТОРНАЯ БАТАРЕЯ И АККУМУЛЯТОРНАЯ СИСТЕМА | 2019 |
|
RU2779926C1 |
| АЭРАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЦИСТЕРН, СОДЕРЖАЩИХ ПОРОШКОВЫЕ МАТЕРИАЛЫ ИЛИ ТОМУ ПОДОБНОЕ | 2014 |
|
RU2625228C2 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ НА ФАЗЫ С РАЗНЫМИ ПЛОТНОСТЯМИ (ВАРИАНТЫ) | 2010 |
|
RU2599759C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА И СПОСОБ ДОСТАВКИ ВЕЩЕСТВА ЖИВОТНОМУ | 2016 |
|
RU2736858C2 |
| НАНОСИМАЯ РАСПЫЛЕНИЕМ ШОКОЛАДНАЯ ГЛАЗУРЬ С ПОНИЖЕННЫМ СОДЕРЖАНИЕМ ЖИРА | 2008 |
|
RU2480994C2 |
| УСТАНОВКА И СПОСОБ ИЗГОТОВЛЕНИЯ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2018 |
|
RU2716321C1 |
| УЗЕЛ ДЛЯ РАЗДЕЛЕНИЯ ЖИДКОСТИ НА ФАЗЫ С РАЗНЫМИ ПЛОТНОСТЯМИ (ВАРИАНТЫ) | 2010 |
|
RU2610591C2 |
| ВЕНЧИК ДЛЯ КУХОННОГО ЭЛЕКТРОБЫТОВОГО ПРИБОРА | 2012 |
|
RU2570775C2 |
| МЕТОД И УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2019 |
|
RU2753305C1 |
Изобретение относится к устройству и способу оптического осмотра сантехнических изделий. Заявленное устройство (1) для оптического осмотра сантехнических изделий содержит: опорное средство (2), выполненное с возможностью размещения на нем осматриваемого сантехнического изделия (6) в положении осмотра, набор камер (41А, 41В, 42А, 42В, 42С, 42D), выполненных с возможностью снятия набора изображений (4) осматриваемого сантехнического изделия (6) в положении осмотра, автоматический манипулятор, выполненный с возможностью перемещения между набором рабочих положений относительно опорного средства (2), причем указанный набор камер (41А, 41В, 42А, 42В, 42С, 42D) установлен на автоматическом манипуляторе, блок (7) управления, выполненный с возможностью приема набора изображений (4), снятых указанным набором камер (41А, 41В, 42А, 42В, 42С, 42D). При этом блок (7) управления имеет доступ к базе (8) данных, содержащей эталонные данные (81), и выполнен с возможностью обработки набора изображений (4) в зависимости от эталонных данных (81) для предоставления диагностической информации (9) о дефектности сантехнического изделия (6). Причем указанный набор камер (41А, 41В, 42А, 42В, 42С, 42D) содержит по меньшей мере первую группу камер (41А, 41В), выполненных с возможностью снятия трехмерных изображений, и вторую группу камер (42А, 42В, 42С, 42D), выполненных с возможностью снятия двухмерных изображений, при этом камеры указанного набора камер (41А, 41В, 42А, 42В, 42С, 42D) установлены на головке (36) роботизированного манипулятора (3). Технический результат – обеспечение автоматической проверки сантехнического изделия с повышенным уровнем надежности. 2 н. и 16 з.п. ф-лы, 8 ил.
1. Устройство (1) для оптического осмотра сантехнических изделий, содержащее:
- опорное средство (2), выполненное с возможностью размещения на нем осматриваемого сантехнического изделия (6) в положении осмотра,
- набор камер (41А, 41В, 42А, 42В, 42С, 42D), выполненных с возможностью снятия набора изображений (4) осматриваемого сантехнического изделия (6) в положении осмотра,
- автоматический манипулятор, выполненный с возможностью перемещения между набором рабочих положений относительно опорного средства (2), причем указанный набор камер (41А, 41В, 42А, 42В, 42С, 42D) установлен на автоматическом манипуляторе,
- блок (7) управления, выполненный с возможностью приема набора изображений (4), снятых указанным набором камер (41А, 41В, 42А, 42В, 42С, 42D),
при этом блок (7) управления имеет доступ к базе (8) данных, содержащей эталонные данные (81), и выполнен с возможностью обработки набора изображений (4) в зависимости от эталонных данных (81) для предоставления диагностической информации (9) о дефектности сантехнического изделия (6),
причем указанный набор камер (41А, 41В, 42А, 42В, 42С, 42D) содержит по меньшей мере первую группу камер (41А, 41В), выполненных с возможностью снятия трехмерных изображений, и вторую группу камер (42А, 42В, 42С, 42D), выполненных с возможностью снятия двухмерных изображений, при этом камеры указанного набора камер (41А, 41В, 42А, 42В, 42С, 42D) установлены на головке (36) роботизированного манипулятора (3).
2. Устройство (1) по п. 1, в котором автоматический манипулятор представляет собой роботизированный манипулятор (3), содержащий функционально неподвижное основание (31) и функционально подвижную головку (36), причем указанный набор камер (41А, 41В, 42А, 42В, 42С, 42D) установлен на головке (36).
3. Устройство (1) по п. 1 или 2, содержащее по меньшей мере один осветитель (51, 52А, 52В, 52С, 53А, 53В, 53С), выполненный с возможностью освещения осматриваемого сантехнического изделия (6) в положении осмотра, причем указанный по меньшей мере один осветитель (51, 52А, 52В, 52С, 53А, 53В, 53С) установлен на головке (36) роботизированного манипулятора (3).
4. Устройство (1) по п. 1, содержащее набор осветителей (51, 52А, 52В, 52С, 53А, 53В, 53С), выполненных с возможностью освещения осматриваемого сантехнического изделия (6),
причем осветители в указанном наборе осветителей (51, 52А, 52В, 52С, 53А, 53В, 53С) установлены на головке (36) роботизированного манипулятора (3).
5. Устройство (1) по п. 4, в котором набор осветителей (51, 52А, 52В, 52С, 53А, 53В, 53С) содержит центральный осветитель (51) и первую группу (52А, 52В, 52С) и вторую группу (53А, 53В, 53С) боковых осветителей, расположенных на противоположных сторонах головки (36), причем камеры второй группы камер (42А, 42В, 42С, 42D) расположены вокруг центрального осветителя (51) и расположены между первой группой (52А, 52В, 52С) и второй группой (53А, 53В, 53С) боковых осветителей, при этом первая группа (52А, 52В, 52С) и вторая группа (53А, 53В, 53С) боковых осветителей расположены между камерами первой группы камер (41А, 41В).
6. Устройство (1) по п. 4 или 5, в котором набор осветителей (51, 52А, 52В, 52С, 53А, 53В, 53С) содержит структурированный осветитель, выполненный с возможностью проецирования структурированного света на осматриваемое сантехническое изделие (6).
7. Устройство (1) по п. 4, в котором блок (7) управления выполнен с возможностью:
- включения первой группы камер (41А, 41В) для снятия трехмерных изображений сантехнического изделия (6),
- обработки трехмерных изображений, снятых первой группой камер (41А, 41В),
- выборочного включения одной или более камер из второй группы камер (42А, 42В, 42С, 42D) и одного или более осветителей из набора осветителей (51, 52А, 52В, 52С, 53А, 53В, 53С) и/или с возможностью управления перемещением роботизированного манипулятора (3) в зависимости от трехмерных изображений, снятых первой группой камер (41А, 41В).
8. Устройство (1) по п. 1 или 2, в котором указанный набор камер содержит убираемую камеру, выполненную с возможностью перемещения между убранным положением, в котором она находится в головке (36) роботизированного манипулятора (3), и выдвинутым положением, в котором она выступает из головки (36) роботизированного манипулятора (3).
9. Устройство (1) по п. 1 или 2, содержащее излучатель, связанный с автоматическим манипулятором и выполненный с возможностью излучения волны, направленной на осматриваемое сантехническое изделие (6), при этом блок (7) управления выполнен с возможностью приема сигнала, представляющего отражение волны на осматриваемом сантехническом изделии (6), и обработки указанного сигнала, представляющего отражение волны, для предоставления диагностической информации (9).
10. Устройство (1) по п. 1 или 2, в котором блок (7) управления выполнен с возможностью создания трехмерной визуализации осматриваемого сантехнического изделия (6) в зависимости от набора снятых изображений (4).
11. Устройство (1) по п. 1 или 2, в котором эталонные данные (81) содержат набор эталонных размеров осматриваемого сантехнического изделия (6), а диагностическая информация (9) содержит информацию, относящуюся к размерной дефектности, при этом блок (7) управления выполнен с возможностью:
- получения набора реальных размеров осматриваемого сантехнического изделия (6) из набора снятых изображений (4),
- сравнения набора реальных размеров с соответствующими эталонными размерами из набора эталонных размеров,
- получения информации, относящейся к размерной дефектности, в зависимости от разницы между реальными размерами и эталонными размерами.
12. Устройство (1) по п. 1 или 2, в котором эталонные данные (81) содержат для набора снятых изображений (4) соответствующий набор эталонных изображений, представляющих эталонное сантехническое изделие, не имеющее дефектов, а диагностическая информация (9) содержит информацию, относящуюся к дефектности поверхности, при этом блок (7) управления выполнен с возможностью сравнения одного или более изображений из набора изображений (4) с соответствующими эталонными изображениями из набора эталонных изображений и получения информации о дефектности поверхности в зависимости от сравнения снятых изображений (4) с соответствующими эталонными изображениями.
13. Устройство (1) по п. 1 или 2, в котором опорное средство (2) содержит платформу (22), выполненную с возможностью поворота вокруг вертикальной поворотной оси (А2) и с возможностью поддержания сантехнического изделия (6) в положении осмотра.
14. Устройство (1) по п. 1 или 2, в котором блок (7) управления выполнен с возможностью приема входных данных, представляющих тип осматриваемого сантехнического изделия (6), и выбора эталонных данных (81) из базы данных в зависимости от входных данных, при этом блок (7) управления выполнен с возможностью приведения автоматического манипулятора (3) в заданную последовательность рабочих положений из набора рабочих положений в зависимости от входных данных.
15. Устройство (1) по п. 1 или 2, в котором блок (7) управления выполнен с возможностью приема идентификационного кода для идентификации сантехнического изделия (6) и с возможностью создания отчетного документа, содержащего для сантехнического изделия (6) его идентификационный код указанного изделия (6) и диагностическую информацию (9).
16. Способ оптического осмотра сантехнических изделий, включающий следующие этапы:
- размещение осматриваемого сантехнического изделия (6) на опорном средстве (2) в положении осмотра,
- перемещение автоматического манипулятора (3) между набором рабочих положений.
- снятие набора изображений (4) осматриваемого сантехнического изделия (6) с помощью по меньшей мере одной камеры (41А, 41В, 42А, 42В, 42С, 42D), причем указанная по меньшей мере одна камера (41А, 41В, 42А, 42В, 42С, 42D) связана с автоматическим манипулятором (3),
- обработку изображений (4) в зависимости от эталонных данных (81) для получения диагностической информации (9) о дефектности сантехнического изделия (6),
при этом на этапе снятия выполняют первый подэтап снятия трехмерных изображений сантехнического изделия (6) и второй подэтап снятия двухмерных изображений одной или более зон сантехнического изделия (6).
17. Способ по п. 16, в котором между указанными первым подэтапом и вторым подэтапом снятия выполняют этап обработки трехмерных изображений, полученных на первом подэтапе, для идентификации указанных одной или более зон сантехнического изделия (6).
18. Способ по п. 16 или 17, в котором выполняют этап поворота поворотной платформы (22) опорного средства (2) вокруг вертикальной поворотной оси (А2), причем указанный поворот согласуют с перемещением автоматического манипулятора.
| JP 6148093 A, 27.05.1994 | |||
| EP 3540414 A1, 18.09.2019 | |||
| WO 2015011782 A1, 29.01.2015 | |||
| WO 2018042399 A1, 08.03.2018 | |||
| WO 2019197981 A1, 17.10.2019. |

